Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Identificación de Sistemas
El metodo de los minimos cuadrados

2
El problema del modelado de datos
Contenido Modelado de datos El problema del modelado de datos Modelos lineales y modelos no lineales Estimación de mínimos cuadrados lineal Identificabilidad Mínimos Cuadrados para un modelo lineal (dinamico) Propiedades del método de los Minimos Cuadrados Criterio de Akaike Ejemplos
 Propiedades del método de los Minimos Cuadrados. Criterio de Akaike. Ejemplos.")
3
Modelado de datos

4
Modelado de datos El modelado de datos se puede expresar de la siguiente forma: Dadas: Una colección finita de datos Una forma funcional Hallar los parametros de la funcion que mejor representen la relacion entre los datos (xi, yi) y = f (x)
 y = f (x)")
5
Modelado de datos Se busca minimizar unos residuos f (x) = ax+b
(x1,y1) (x2,y2) (x3,y3) (x4,y4) (x5,y5) (x6,y6) (x7,y7) f(x) = ax+b f (x) = ax+b Un ejemplo
 (x2,y2) (x3,y3) (x4,y4) (x5,y5) (x6,y6) (x7,y7) f(x) = ax+b. f (x) = ax+b. Un ejemplo.")
6
Criterio de los minimos cuadrados
Formulacion del ajuste por Minimos cuadrados:

7
Criterio de los minimos cuadrados
En el ejemplo, hallar el valor de los coeficientes a y b tal que se minimiza donde N es el numero de datos entrada-salida dado

8
Un problema de optimizacion
Aproximaciones computacionales: Solucion analitica: minimos cuadrados lineal Algoritmos numericos para la minimizacion de una funcion Basados en el gradiente; algoritmos numericos generales para hallar raices; algoritmos que aprovechan la forma de la funcion Algoritmos con una aproximacion basada en la inteligencia artificial: algoritmos geneticos

9
El problema del modelado de datos

10
La aproximacion de funciones
Una funcion puede verse como un mapeo Ejemplo: ley fundamental de la dinámica F = ma y = a, u = F, g(u) = u/m. En general, y y u pueden ser vectores
 = u/m. En general, y y u pueden ser vectores.")
11
La aproximacion de funciones
Al realizar la aproximacion de una funcion, sólo están disponibles un número finito de muestras ¿Podemos postular la existencia de un modelo que explique los datos?

12
Ejemplo: una entrada, una salida
¿Como podemos modelar el proceso que genera estos datos?

13
Ejemplo: dos entradas, una salida

14
La aproximacion de funciones
En general, se asume que las muestras disponibles son ruidosas k = 1,2,…, N Entonces el problema de la aproximacion de funciones es equivalente a reconstruir la hipersuperficie g(u) a partir de los pares (u(k),y(k)).
 a partir de los pares (u(k),y(k)).")
15
El problema de la aproximacion de funciones
Dada cierta función, deseamos construir una función f tal que donde y

16
El problema de la aproximacion de funciones
La informacion que se dispone de g son N pares de entrada-entrada normalmente se asume que los valores de salida del conjunto de muestras de entrenamiento estan adulterados por el ruido

17
El Reto Normalmente sabemos muy poco sobre la asociacion entre U y Y

18
El Reto Normalmente sabemos muy poco sobre la asociacion entre U y Y Puede ser difícil proponer una buena función f(u) para ajustar el mapeo desconocido g
 para ajustar el mapeo desconocido g.")
19
El Reto Normalmente sabemos muy poco sobre la asociacion entre U y Y ? Puede ser difícil proponer una buena función f(u) para ajustar el mapeo desconocido g Puede ser dificil incluso saber cuando tenemos una buena aproximación ?
 para ajustar el mapeo desconocido g. Puede ser dificil incluso saber cuando tenemos una buena aproximación.")
20
Modelos lineales y modelos no lineales

21
Modelos lineales vs . No lineales
Es comun asumir que f (u) pertenece a una familia de funciones que comparten la misma estructura y difieren por los valores tomados por ciertos parametros θ.
 pertenece a una familia de funciones que. comparten la misma estructura y. difieren por los valores tomados por ciertos parametros θ.")
22
Aquí, la linealidad se refiera a “con respecto a los parametros”
El modelo lineal Un modelo lineal (en los parametros) asume que la funcion es lineal respecto a los parametros θ Aquí, la linealidad se refiera a “con respecto a los parametros”
 asume que la funcion es lineal respecto a los parametros θ. Aquí, la linealidad se refiera a con respecto a los parametros")
23
Modelos no-lineales En los modelos no-lineales la funcion es no-lineal respecto a los parametros θ

24
Estimación de Mínimos Cuadrados Lineal

25
El problema U Y t Regresor lineal
Dada una colección finita de observaciones ZN = {u(0), y(0), u(1), y(1), ..., u(N), y(N)} t Y U Proceso Modelo Regresor lineal
, y(0), u(1), y(1), ..., u(N), y(N)} t. Y. U. Proceso. Modelo. Regresor lineal.")
26
El regresor lineal Se asume que la relación entrada-salida puede ser descrita por una estructura de regresor lineal f(u,θ) es denominada la funcion de ajuste. Las fi(u) son denominadas las funciones base
 es denominada la funcion de ajuste. Las fi(u) son denominadas las funciones base.")
27
Algunas funciones base
Funciones polinomiales Funciones base Gausianas Funciones base Sigmoidales Fourier wavelets

28
Los errores cometidos Dados unos datos y el modelo lineal, deseamos calcular los “mejores” parametros. Queremos minimizar los errores. Cortesia de Johann Fredrich Carl Gauss ( ) error
 error.")
29
Los residuos El ajuste de minimos cuadrados halla el vector de parametros θ tal que se minimiza residuos = errores

30
Naturaleza de los residuos
Normalmente se asume que los residuos son variables aleatorias, con las siguientes caracteristicas: Independientes Con valor esperado es cero Normalmente distribuidas Tienen la misma desviacion estandard

31
El modelo de los datos Considere, por ejemplo, el modelo con tres parametros: Podemos escribir todo en forma vectorial

32
Calculo de los mejores θj’s
Considerando N datos, en forma matricial

33
Calculo de los mejores θj’s
cuando N > q normalmente no es posible encontrar los θj que simultáneamente satisfacen todas las N ecuaciones, entonces El criterio para determinar el estimado de los parametros optimos es

34
Calculo de los mejores θj’s
La Cantidad a ser minimizada es Que expresada en forma matricial nos queda

35
Calculo de los mejores θj’s
La Cantidad a ser minimizada es igualando a cero su derivada

36
La ecuacion normal El valor minimo de J se obtiene con el vector θ que satisface la ecuacion normal Ecuacion normal

37
identificabilidad

38
Existencia de los parametros
La solución única a las ecuaciones normales pueden ser obtenida siempre que la matriz (ATA) sea no singular (existencia de la inversa) Llamado el Estimador de minimos cuadrados lineal
 sea no singular (existencia de la inversa) Llamado el Estimador de minimos cuadrados lineal.")
39
Existencia de los parametros
El estimador de minimos cuadrado lineal: Notese que el minimizador obtenido es influenciado por: Las funciones de ajuste seleccionadas, y Las señales de entrada observadas.

40
Identificabilidad Dadas: Las señales de entrada observadas, y
El estimado de los parametros (del modelo) existen si la inversa de la matriz (ATA) existe Las señales de entrada observadas, y Las funciones de ajuste seleccionadas Se dice entonces que el modelo es identificable
 existen si la inversa de la matriz (ATA) existe. Las señales de entrada observadas, y. Las funciones de ajuste seleccionadas. Se dice entonces que el modelo es identificable.")
41
Identificabilidad Se dice entonces que el modelo es identificable
Observe que decimos “que entonces el modelo es identificable” La identificabilidad se refiere al modelo Quizas el modelo con otros datos sea identificable O quizas los mismos datos otra estructura de modelo sea identificable

42
Los parametros “verdaderos”
Si existen, el vector de parámetros “verdadero” describe a aquel que minimiza el error A menudo es conveniente estudiar las propiedades de los parámetros en terminos del error es el vector de parámetros “verdadero”.

43
Mínimos Cuadrados para un modelo lineal (dinamico)
")
44
Ejemplo: estructura AR
En la identificacion de sistemas usualmente se usa un modelo AR (AutoRegressive model), donde y(k) es la salida del sistema en el tiempo k ≥ 0.
, donde. y(k) es la salida del sistema en el tiempo k ≥ 0.")
45
Ejemplo: estructura AR
Una forma util de ver el modelo AR es verlo como una manera de determinar el siguiente valor de la salida, dadas las observaciones previas

46
Ejemplo: estructura AR
En este caso el modelo AR esta definido por el modelo lineal En general, el vector de regresión (regresor) se construye,, con los datos de entrada-salida pasados, hasta el instante k-1
 se construye,, con los datos de entrada-salida pasados, hasta el instante k-1.")
47
Ejemplo: estructura ARX
Por ejemplo, en el caso de una estructura de modelo simple como el ARX de primer orden:

48
Ejemplo: estructura ARX
En el caso de una estructura ARX la correspondencia con la formulación general seria

49
La matriz de datos El problema de la estimacion de parametros consiste en encontrar relaciones matemáticas entre secuencias de entrada y las secuencias de salida. En general, los datos se tienen en forma de una matriz t = 1,...N

50
La estimación de parámetros
La estimación de parámetros consiste en hallar la estima de que minimiza el criterio. Error de Predicción

51
Relacion con la identificacion
En el modelo de regresión lineal se suele incorporar un término de perturbación (n) Para modelar la parte de la salida que no puede ser explicada por el regresor lineal
 Para modelar la parte de la salida que no puede ser explicada por el regresor lineal.")
52
(n) es un proceso estocástico
Naturaleza de (n) Se da una caracterización estocástica para (n), (n) es un proceso estocástico
 Se da una caracterización estocástica para (n), (n) es un proceso estocástico.")
53
Solucion: Minimos cuadrados
Asumamos que el sistema dinamico se puede representar por el modelo lineal es el vector de regresion entradas y salidas retardadas es el vector de parametros

54
Solucion: Minimos cuadrados
En estas condiciones Se introducen los terminos N a fin de retener expresiones que sean computacionalmente factibles para señales de entrada cuasi-estacionarias

55
Existencia de la solucion
El requisito necesario para garantizar una solución única es que la señal de excitación sea persistentemente excitada de orden mayor que d, siendo d el numero de parametros del modelo, [Söderström89].

56
Propiedades del método de los Minimos Cuadrados

57
Unicidad de la solucion
La principal ventaja de este método es que Si se cumplen las condiciones de identificabilidad la obtención del mínimo global está garantizada Y la solucion es unica

58
Naturaleza de los parametros
Si se da una caracterización estocástica para (n), (n) es un proceso estocástico ¡El estimador por mínimos cuadrados es una variable aleatoria!
, (n) es un proceso estocástico. ¡El estimador por mínimos cuadrados es una variable aleatoria!")
59
Los parametros “verdaderos”
Supongamos la existencia de un juego de parametros “verdadero” donde e(t) es un ruido blanco de media cero y variancia
 es un ruido blanco de media cero y variancia.")
60
Propiedades de los parametros estimados
converge a cuando N tiende a infinito La variable aleatoria se comporta como una distribución normal de media cero y covariancia

61
Propiedades del ruido estimado
Un estimador de la variancia de e(t) es: siendo d el número de parámetros del modelo
 es: siendo d el número de parámetros del modelo.")
62
Observacion si la perturbación e(t) no es un ruido blanco y la relación señal útil/señal ruido es importante, la convergencia a no está garantizada.

63
Criterio de Akaike

64
Criterio de Akaike Una variante del método LS, conocido como Criterio de Akaike consiste en minimizar la función de pérdidas

65
Ejemplos

66
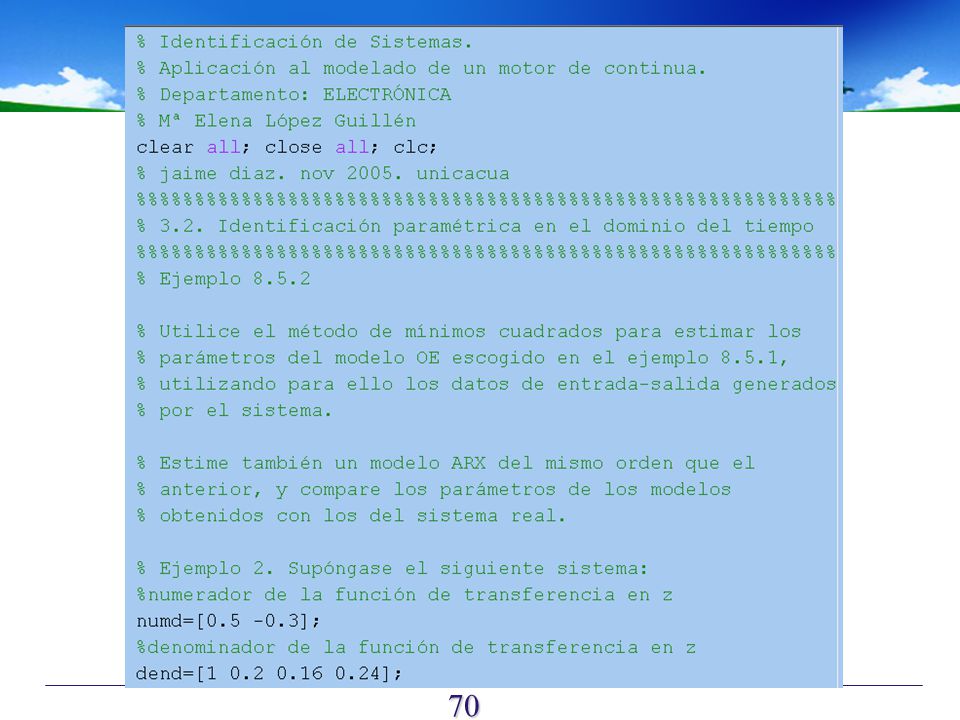
Ejemplo Ejemplo: Supóngase el sistema
¿Cuál es el tipo de estructura más apropiada a elegir para identificación?

67
Eleccion de la estructura
El tipo de estructura más apropiada para identificación debe ser del tipo “Output Error” (OE). Por tanto nb = 2, nf = 3 y nk = 2.
. Por tanto nb = 2, nf = 3 y nk = 2.")
68
Eleccion de la estructura: Ejemplo
El tipo de estructura más apropiada para identificación debe ser del tipo “Output Error” (OE). ¡ Sin embargo, en la mayoría de los casos el diseñador no dispone de la información sobre el sistema real !
. ¡ Sin embargo, en la mayoría de los casos el diseñador no dispone de la información sobre el sistema real !")
69
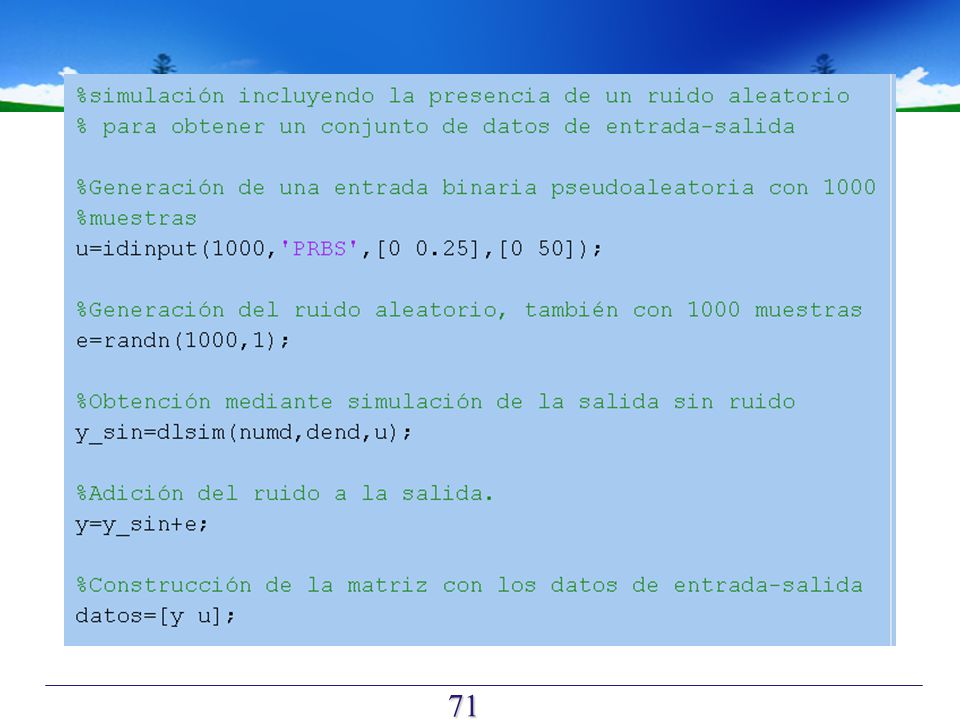
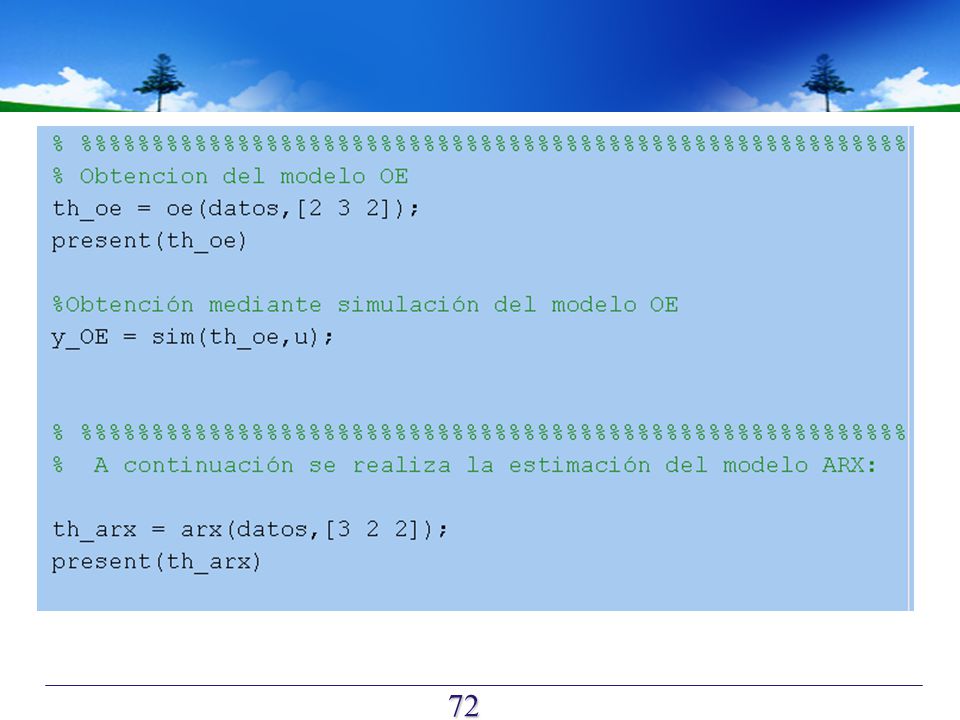
Ejemplo Ejemplo: Supóngase el sistema
Estimar los parámetros del modelo OE escogido Estimar un modelo ARX. Comparar resultados.

73
Ejercicio ar armax arx bj oe pem ivar ivx iv4 present Investigar las funciones mostradas del Toolbox de identificacion en matlab

74
Problemas Ver el documento Tema 3_problemes.pdf
De los profesores Teresa Escobet y Bernardo Morcego de la Escola Universitària Politècnica de Manresa [Escobet et al., 2003].

75
Fuentes De Nicolao G., System Identification: Problems and perspectives. Dipartimento di Informatica e Sistemistica, Universiti di Pavia, Pavia, Italy Passino Kevin M., Yurkovich Stephen, Fuzzy Control. Addison Wesley Longman, Inc. 1998 Recktenwald Gerald, A Curve-Fitting Cookbook for use with the NMM Toolbox. Mechanical Engineering Department, Portland State University, Portland, Oregon. October 17, 2000. Recktenwald G. W., Numerical Methods with MATLAB: Implementations and Applications. Prentice-Hall, Englewood Cliffs, NJ, 2000. Ljung Lennart, Linear System Identificación as Curve Fitting. Report no.: LiTH-ISY-R Division of Automatic Control. Department of Electrical Engineering Linkopings universitet, Linkoping, Sweden. August 7, 2002. Moler C. and Moler K., Numerical Computing with MATLAB. The MathWorks, Inc. and Stanford University Sanjay Lall, Modern Control 1. Lecture Notes. Standford University. Winter quarter,

76
ULTIMA DIAPOSITIVA

Presentaciones similares
>")


















