Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tema 0. fundamentos de mecánica

2
1. Magnitudes escalares y vectoriales
MAGNITUD ESCALAR: DEFINIDA POR NÚMERO Y UNIDAD MASA, TIEMPO, VOLUMEN, ENERGÍA, … (4 kg, 67 s, 5 L, 900 J) MAGNITUD VECTORIAL: DEFINIDA POR VECTORES MÓDULO: Longitud del vector DIRECCIÓN: Recta sobre la que se apoya el vector SENTIDO: Hacia donde señala la flecha PUNTO DE APLICACIÓN: Origen de la flecha
 MAGNITUD VECTORIAL: DEFINIDA POR VECTORES. MÓDULO: Longitud del vector. DIRECCIÓN: Recta sobre la que se apoya el vector. SENTIDO: Hacia donde señala la flecha. PUNTO DE APLICACIÓN: Origen de la flecha.")
3
OPERACIONES CON VECTORES
SUMA: se suman las componentes x, y y z por separado. A = Axi + Ayj + Azk B = Bxi + Byj + Bzk El vector resultante es R = A + B = (Ax + Bx)i + (Ay + By)j + (Az + Bz)k
i + (Ay + By)j + (Az + Bz)k.")
4
OPERACIONES CON VECTORES
RESTA: se restan las componentes x, y y z por separado. A = Axi + Ayj + Azk B = Bxi + Byj + Bzk El vector resultante es R = A -B = (Ax - Bx)i + (Ay - By)j + (Az - Bz)k
i + (Ay - By)j + (Az - Bz)k.")
5
OPERACIONES CON VECTORES
OPUESTO: El opuesto a un vector A es otro vector (-A) de igual módulo y dirección y de sentido opuesto A = Axi + Ayj + Azk (-A)= (-Ax)i + (-Ay)j + (-Az)k PRODUCTO DE UN VECTOR POR UN ESCALAR: n·(A)= n(Ax)i + n(Ay)j + n(Az)k
 de igual módulo y dirección y de sentido opuesto. A = Axi + Ayj + Azk. (-A)= (-Ax)i + (-Ay)j + (-Az)k. PRODUCTO DE UN VECTOR POR UN ESCALAR: n·(A)= n(Ax)i + n(Ay)j + n(Az)k.")
6
Componentes cartesianas de un vector
TODO VECTOR “A” ES SUMA DE SUS COMPONENTES. CASO MÁS IMPORTANTE: LAS COMPONENTES SON PERPENDICULARES FORMANDO UN SISTEMA DE EJES CARTESIANOS x ,y y z A = Axi + Ayj + Azk CUALQUIER VECTOR DEL ESPACIO EN COORDENADAS CARTESIANAS PUEDE ESCRIBIRSE COMO COMBINACIÓN LINEAL DE LOS VECTORES UNITARIOS i, j Y k.

7
Componentes cartesianas de un vector

8
Módulo de un vector COMPONENETES CARTESIANAS DE UN VECTOR UNITARIO:
A = Axi + Ayj + Azk VECTOR UNITARIO SU MÓDULO ES LA UNIDAD: COMPONENETES CARTESIANAS DE UN VECTOR UNITARIO:

9
2. PRODUCTO ESCALAR PRODUCTO DEL MÓDULO DE UN VECTOR POR LA PROYECCIÓN DEL OTRO SOBRE ÉL SE DEFINE COMO PRODUCTO DE LOS MÓDULOS POR EL COSENO DEL ÁNGULO MENOR QUE FORMAN SUS DIRECCIONES

10
2. PRODUCTO ESCALAR ES CONMUTATIVO:
PODEMOS EXPRESARLO EN FUNCIÓN DE SUS COORDENADAS CARTESIANAS: ya que se cumple que PRODUCTO ESCALAR DE UN VECTOR CONSIGO MISMO: PERMITE CALCULAR EL ÁNGULO QUE FORMAN DOS VECTORES A PARTIR DE SUS COORDENADAS CARTESIANAS:

11
Propiedades deducidas del producto escalar

12
PRODUCTO vectorial PRODUCTO DE DOS VECTORES CUYO RESULTADO ES OTRO VECTOR CON LAS SIGUIENTES CARACTERÍSTICAS: SU MÓDULO ES EL PRODUCTO DE LOS DOS MÓDULOS POR EL SENO DEL ÁNGULO QUE FORMAN SU DIRECCIÓN ES PERPENDICULAR AL PLANO FORMADO POR LOS DOS VECTORES SU SENTIDO DE AVANCE ES EL DE UN SACACORCHOS QUE GIRE DE p A q POR EL CAMINO MÁS CORTO

13
3. PRODUCTO vectorial

14
Propiedades deducidas del producto VECTORIAL

15
Producto vectorial en coordenadas cartesianas

16
Producto vectorial en coordenadas cartesianas
Ejemplo El producto vectorial de los vectores y se calcula del siguiente modo: Expandiendo el determinante: Puede verificarse fácilmente que es perpendicular a los vectores a y b efectuando el producto escalar y comprobando que éste es nulo (condición de perpendicularidad de vectores)
")
17
Magnitudes que se obtienen mediante el producto vectorial
MOMENTO DE UNA FUERZA F APLICADA SOBRE UN PUNTO P M = r x F MOMENTO ANGULAR DE UNA PARTÍCULA DE MASA m QUE SE MUEVE CON VELOCIDAD v : L0 = r x mv = r x p DONDE r ES EL VECTOR POSICIÓN QUE VA DESDE EL ORIGEN HASTA EL COMIENZO DEL OTRO VECTOR

18
Magnitudes que se obtienen mediante el producto vectorial

19
4. CÁLCULO DIFERENCIAL observando que VELOCIDAD MEDIA:
4. CÁLCULO DIFERENCIAL VELOCIDAD MEDIA: VELOCIDAD INSTANTÁNEA: CONCEPTO DE DERIVADA: Desarrollado por Leibniz y Newton DEFINICIÓN: La derivada de una función y respecto de la variable x es el límite de esta razón cuando Dx0. Se representa como y’ ,f’(x) o dy/dx ¡¡¡DAR TABLA DE DERIVADAS!!!
 o dy/dx. ¡¡¡DAR TABLA DE DERIVADAS!!!")
20
Interpretación geométrica
INTERPRETACIÓN GEOMÉTRICA: y = f(x). A cada valor de x le corresponde un valor de y = f(x), que se asocia al punto P (x,y). Al aumentar la variable x en Dx, la función también se ve incrementada en y+Dy=f(x+Dx). A estos nuevos valores les corresponde en la curva el punto B (x+Dx, y+Dy) Concepto de derivada 01[1].mp4
. A cada valor de x le corresponde un valor de y = f(x), que se asocia al punto P (x,y). Al aumentar la variable x en Dx, la función también se ve incrementada en y+Dy=f(x+Dx). A estos nuevos valores les corresponde en la curva el punto B (x+Dx, y+Dy) Concepto de derivada 01[1].mp4.")
21
EJERCICIOS LLEGADOS A ESTE PUNTO SE PUEDEN HACER LOS EJERCICIOS DEL 1 AL 4 DEL TEMA 0

22
5. CINEMÁTICA DEL PUNTO MATERIAL
CINEMÁTICA DESCRIBE EL MOVIMIENTO DE LOS CUERPOS SIN BUSCAR SU ORIGEN CONCEPTO DEL SISTEMA DE REFERENCIA: LA FÍSICA MODERNA NO ACEPTA EL ESPACIO Y TIEMPO ABSOLUTOS TODOS LOS MOVIMIENTOS SON RELATIVOS. ASÍ, PARA DESCRIBIR UN MOVIMIENTO, NECESITO UN SISTEMA DE REFERENCIA, QUE SUELE SER UN SISTEMA DE EJES CARTESIANOS EN CUYO ORIGEN ESTÁ EL OBSERVADOR

23
MAGNITUDES CINEMÁTICAS
1. TRAYECTORIA: Línea formada por las sucesivas posiciones de un móvil. Tipos de movimiento: 1. RECTILÍNEO TRAYECTORIA = LÍNEA RECTA 2. CURVILÍNEO TRAYECTORIA = CURVA (CIRCULARES, PARABÓLICOS, ELÍPTICOS,…) ECUACIONES PARAMÉTRICAS: Relaciones matemáticas que relacionan las coordenadas espaciales con el tiempo x = x(t); y = y(t); z = z(t)
 ECUACIONES PARAMÉTRICAS: Relaciones matemáticas que relacionan las coordenadas espaciales con el tiempo x = x(t); y = y(t); z = z(t)")
24
MAGNITUDES CINEMÁTICAS
2. VECTOR POSICIÓN: Vector cuyo punto de aplicación es el origen de coordenadas y cuyo extremo es la posición del móvil en cada instante r= OP = x i + y j + z k r = r(t) = x(t) i + y(t) j + z(t) k La distancia al origen de coordenadas es el módulo de este vector: OP = r = │r│=
 = x(t) i + y(t) j + z(t) k La distancia al origen de coordenadas es el módulo de este vector: OP = r = │r│=")
25
MAGNITUDES CINEMÁTICAS
3. VECTOR DESPLAZAMIENTO: Es la diferencia entre dos vectores posición Dr= P1P2 = r2 – r1 = (x2-x1)i + (y2 –y1)j + (z2-z1)k El desplazamiento espacial es el módulo del vector Dr P1P2 =
i + (y2 –y1)j + (z2-z1)k El desplazamiento espacial es el módulo del vector Dr P1P2 =")
26
MAGNITUDES CINEMÁTICAS
4. ESPACIO RECORRIDO: LONGITUD DEL TRAMO DE TRAYECTORIA DESCRITO EN UN TIEMPO DETERMINADO. NO SUELE COINCIDIR CON EL DESPLAZAMIENTO ESPACIAL (QUE ES UN SEGMENTO RECTO) A NO SER QUE TENGAMOS UN MOVIMIENTO RECTILÍNEO DE SENTIDO CONSTANTE s = s(t) Ds = s2 – s1
 A NO SER QUE TENGAMOS UN MOVIMIENTO RECTILÍNEO DE SENTIDO CONSTANTE s = s(t) Ds = s2 – s1")
27
MAGNITUDES CINEMÁTICAS
ESPACIO RECORRIDO (--) vS VECTOR DESPLAZAMIENTO (--) VECTOR POSICIÓN
 vS VECTOR DESPLAZAMIENTO (--) VECTOR POSICIÓN")
28
MAGNITUDES CINEMÁTICAS
5. VELOCIDAD: MIDE EL RITMO TEMPORAL AL QUE SE PRODUCEN LOS CAMBIOS DE POSICIÓN. AL DERIVAR EL VECTOR POSICIÓN RESPECTO DEL TIEMPO OBTENEMOS LA VELOCIDAD: 6. CELERIDAD: MAGNITUD ESCALAR QUE MIDE LA RAPIDEZ CON QUE SE DESPLAZA EL MÓVIL SOBRE LA TRAYECTORIA. EN MOVIMIENTOS CURVOS cm ≠ vm ¡¡¡¡no de espacio recorrido!!!!

29
MAGNITUDES CINEMÁTICAS
7. ACELERACIÓN: MIDE LOS CAMBIOS DE VELOCIDAD RESPECTO DEL TIEMPO. AL DERIVAR EL VECTOR VELOCIDAD RESPECTO DEL TIEMPO OBTENEMOS LA ACELERACIÓN: COMPONENTES INTRÍNSECAS DE LA ACELERACIÓN: a = at +an

30
MAGNITUDES CINEMÁTICAS
ACELERACIÓN TANGENCIAL (cambia el módulo de v mientras que la dirección ut se mantiene constante): ACELERACIÓN NORMAL (cambia la dirección de v mientras que el módulo se mantiene constante): SE PUEDEN HACER EJERCICIOS 6,7 Y 8
: ACELERACIÓN NORMAL (cambia la dirección de v mientras que el módulo se mantiene constante): SE PUEDEN HACER EJERCICIOS 6,7 Y 8.")
31
6.Cinemática de los movimientos simples
MRU DESPLAZAMIENTO EN LÍNEA RECTA CON VELOCIDAD CONSTANTE. CARACTERÍSTICAS: 1. Trayectoria: Línea recta con sentido constante 2. Velocidad: Constante en valor, dirección y sentido 3. Aceleración: Nula ECUACIONES

32
6.Cinemática de los movimientos simples
MRUA DESPLAZAMIENTO EN LÍNEA RECTA CON VELOCIDAD VARIABLE Y ACELERACIÓN CONSTANTE. CARACTERÍSTICAS: 1. Trayectoria: Línea recta 2. Velocidad: Constante en dirección pero variable en sentido y módulo 3. Aceleración: an=0; at = cte en valor, dirección y sentido ECUACIONES

33
6.Cinemática de los movimientos simples
CAÍDA LIBRE MRUA CON LAS SIGUIENTES CARACTERÍSTICAS: 1. Trayectoria: Línea recta vertical descendente 2. Velocidad: Constante en dirección y sentido. Su módulo aumenta desde v0. 3. Aceleración: an=0; at = -g ECUACIONES

34
6.Cinemática de los movimientos simples
CAÍDA DE CUERPOS LANZADOS ECUACIONES

35
6.Cinemática de los movimientos simples
MCU EL RECORRIDO ES UNA CIRCUNFERENCIA PERO LA CELERIDAD ES CONSTANTE. CARACTERÍSTICAS: 1. Trayectoria: Circunferencia recorrida siempre en igual sentido 2. Velocidad: Cambia continuamente de dirección pero es constante en su módulo 3. Aceleración: an=cte; at = 0 ECUACIONES

36
7. CÁLCULO INTEGRAL Si F(x) es una función primitiva de f(x), la expresión F(x)+C se llama integral definida de f(x) y se designa como ∫f(x)dx ∫f(x)dx = F(x)+C Este caso es el inverso del cálculo de una derivada: f(x) = dF(x)/dx. TABLA DE INTEGRALES: ∫dx = x+ C ∫kdx = kx + C
dx = F(x)+C. Este caso es el inverso del cálculo de una derivada: f(x) = dF(x)/dx. TABLA DE INTEGRALES: ∫dx = x+ C. ∫kdx = kx + C.")
37
7. CÁLCULO INTEGRAL INTEGRAL DEFINIDA: ES EL ÁREA LIMITADA POR UNA CURVA. Dividimos el área en pequeños rectángulos. El cálculo será más aproximado cuanto más pequeña sea la base. La relación entre el área y el cálculo integral viene dada por la regla de Barrow:

38
8. Dinámica del punto material
LA DINÁMICA SE ENCARGA DE BUSCAR EL ORIGEN DE LOS MOVIMIENTOS. LEYES DE NEWTON: PRIMERA LEY DE LA DINÁMICA: PRINCIPIO DE INERCIA Todo cuerpo mantiene su estado de movimiento a no ser que actúe una fuerza sobre él SEGUNDA LEY DE LA DINÁMICA: PRINCIPIO FUNDAMENTAL La aceleración que experimenta un cuerpo es proporcional a las fuerzas a las que está sometido. La constante de proporcionalidad es la masa del cuerpo

39
8. DINÁMICA DEL PUNTO MATERIAL
TERCERA LEY DE LA DINÁMICA: PRINCIPIO DE ACCIÓN Y REACCIÓN Cuando un cuerpo ejerce una fuerza sobre otro, el segundo realiza simultáneamente otra fuerza sobre el primero, de igual módulo y dirección, pero de sentido contrario. A TENER EN CUENTA Acción y reacción son dos procesos simultáneos (no consecutivos) Las dos fuerzas no se anulan entre sí porque actúan sobre cuerpos ≠ Fuerzas iguales no implican efectos iguales. Las consecuencias de cada una dependen de su masa
 Las dos fuerzas no se anulan entre sí porque actúan sobre cuerpos ≠ Fuerzas iguales no implican efectos iguales. Las consecuencias de cada una dependen de su masa.")
40
8.1. estudio dinámico de algunos movimientos simples
MRU NO TIENE ACELERACIÓN, POR LO QUE Fresultante = 0 MRUA an = 0 y at = cte a = cte. ASÍ, COMO a = cte ; m = cte Fresultante = cte MCU at = 0 y an = cte ACELERACIÓN NORMAL CONSTANTE LA FUERZA QUE PRODUCE UN MCU ES UNA FUERZA CENTRÍPETA PERPENDICULAR AL VECTOR VELOCIDAD Y DIRIGIDA AL CENTRO DE LA CIRCUNFERENCIA

41
Dinámica del punto material
CANTIDAD DE MOVIMIENTO O MOMENTO LINEAL: ES EL PRODUCTO DE LA MASA DE UN CUERPO POR SU VELOCIDAD TIENE LA MISMA DIRECCIÓN Y SENTIDO QUE v EN EL S.I. SE EXPRESA EN kg·m/s EXPRESIÓN DE LA 2ª LEY DE LA DINÁMICA EN FUNCIÓN DE LA CANTIDAD DE MOVIMIENTO: Así, si la fuerza F total es nula, eso quiere decir que dp/dt =0, por tanto, p = cte EN TODO CUERPO AISLADO, LA CANTIDAD DE MOVIMIENTO SE CONSERVA

42
Dinámica del punto material
IMPULSO MECÁNICO: INDICA QUE EL EFECTO DE UNA FUERZA SOBRE EL ESTADO DE MOVIMIENTO DE UN CUERPO DEPENDE DEL TIEMPO DURANTE EL QUE ACTÚA

43
Dinámica del punto material
TEOREMA DEL IMPULSO: RELACIONA EL IMPULSO COMUNICADO A UN CUERPO CON LA VARIACIÓN DE LA CANTIDAD DE MOVIMIENTO QUE EXPERIMENTA: SI LA FUERZA ES CONSTANTE:

44
Dinámica del punto material
TRABAJO: RELACIONA EL MOVIMIENTO CON LA ENERGÍA ES EL PRODUCTO ESCALAR DE LA FUERZA Y EL DESPLAZAMIENTO EN EL S.I. SE MIDE EN J SI TENEMOS UN MOVIMIENTO NO RECTILÍNEO Y/O UNA FUERZA VARIABLE:

45
Dinámica del punto material
TRABAJO DE LAS FUERZAS CONSERVATIVAS: UNA FUERZA CONSERVATIVA ES AQUELLA CUYO TRABAJO SOBRE UN OBJETO EN MOVIMIENTO ENTRE DOS PUNTOS ES INDEPENDIENTE DE LA TRAYECTORIA QUE EL OBJETO TOME ENTRE ESOS DOS PUNTOS PARA UNA FUERZA NO CONSERVATIVA, EL TRABAJO SÍ DEPENDE DE LA TRAYECTORIA DEL OBJETO

46
9. ENERGÍA MECÁNICA DEL PUNTO MATERIAL
TEOREMA DE LAS FUERZAS VIVAS: “El trabajo realizado por la fuerza resultante que actúa sobre un punto material es igual a la variación de su energía cinética” TEOREMA DEL TRABAJO O DE LA ENERGÍA POTENCIAL: “El trabajo realizado por una fuerza conservativa que actúa sobre un punto es independiente del camino y coincide con el opuesto de la variación de la energía potencial asociada a dicha fuerza (DU=DEp)”
")
47
9. ENERGÍA MECÁNICA DEL PUNTO MATERIAL
PRINCIPIO DE CONSERVACIÓN DE LA ENERGÍA MECÁNICA: Em = Ec + Ep SI TODAS LAS FUERZAS SON CONSERVATIVAS: CUANDO TODAS LAS FUERZAS QUE ACTÚAN SOBRE UN PUNTO MATERIAL SON CONSERVATIVAS: DEm = 0. SI EXISTEN FUERZAS NO CONSERVATIVAS (p.e. rozamiento), W = DEc +DEp = DEm
, W = DEc +DEp = DEm.")
48
10. Dinámica del sólido rígido
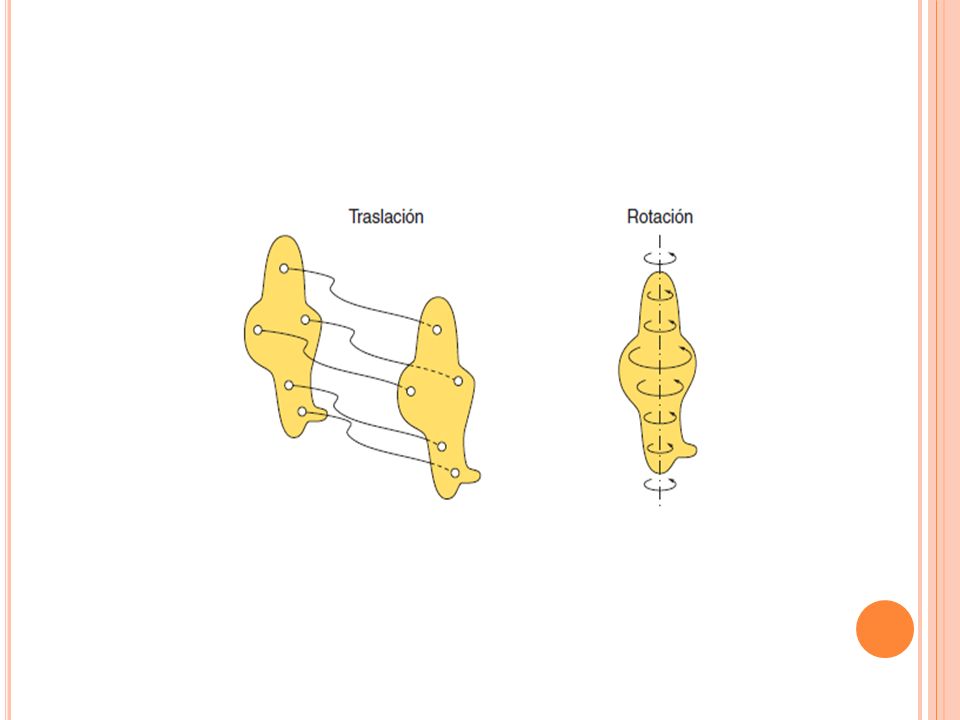
MOVIMIENTOS DEL SÓLIDO RÍGIDO: CONSERVA SU FORMA DURANTE EL MOVIMIENTO TRASLACIÓN: TODAS LAS PARTÍCULAS DESCRIBEN TRAYECTORIAS PARALELAS ROTACIÓN: TODAS LAS PARTÍCULAS DESCRIBEN CIRCUNFERENCIAS ALREDEDOR DE UN EJE DE ROTACIÓN PARA PRODUCIR ROTACIÓN NECESITO PAR DE FUERZAS: Sistema formado por dos fuerzas paralelas de igual valor que actúan sobre un cuerpo en sentido contrario y sobre líneas de acción distintas CUANDO UN PAR DE FUERZAS ACTÚA SOBRE UN SÓLIDO RÍGIDO EN REPOSO, PROVOCA MOVIMIENTO DE ROTACIÓN PURO.

50
10. Dinámica del sólido rígido
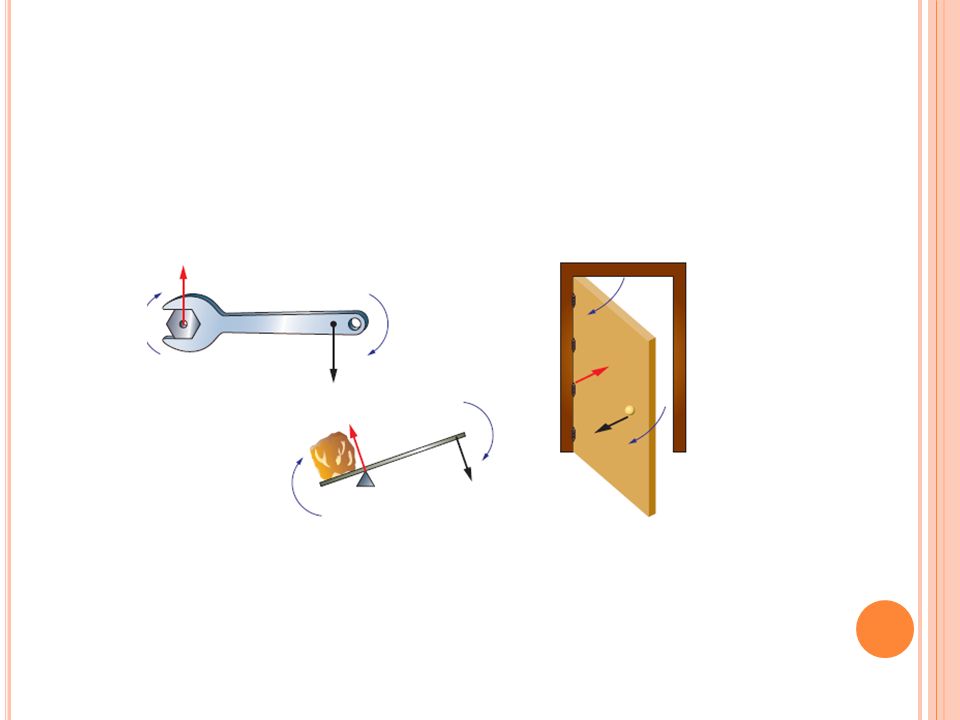
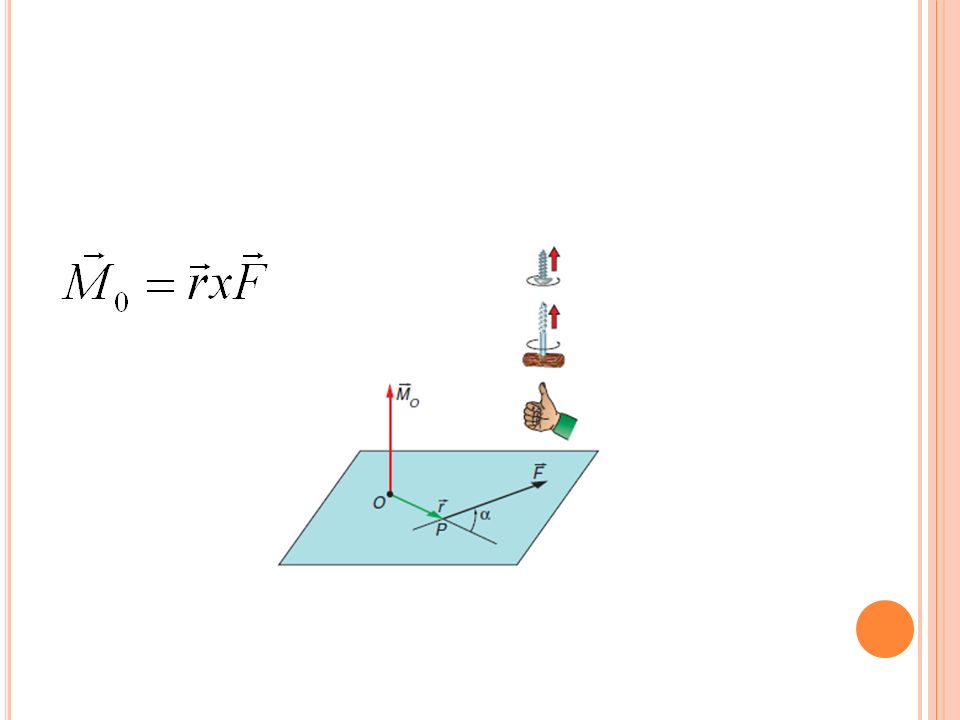
MOMENTO DE UNA FUERZA:CUANDO SE EJERCE UNA FUERZA SOBRE UN SÓLIDO RÍGIDO QUE PUEDE GIRAR ALREDEDOR DE UN EJE, EL SÓLIDO ROTA PORQUE EN EL EJE SE CREA UNA FUERZA DE REACCIÓN DE IGUAL VALOR Y DIRECCIÓN QUE LA FUERZA EXTERNA APLICADA PERO DE SENTIDO CONTRARIO. SE GENERA ASÍ UN PAR DE FUERZAS EL MOMENTO DE UNA FUERZA F APLICADA EN UN PUNTO P RESPECTO DE O ES EL PRODUCTO VECTORIAL DE r = OP Y F

53
10. Dinámica del sólido rígido
MOMENTO DE UN PAR DE FUERZAS: MAGNITUD VECTORIAL QUE TIENE POR MÓDULO CUALQUIERA DE LAS FUERZAS POR LA DISTANCIA (PERPENDICULAR) ENTRE ELLAS
 ENTRE ELLAS.")
54
10. Dinámica del sólido rígido
CARACTERÍSTICAS DEL MOMENTO DE UN PAR: MAGNITUD VECTORIAL INTRÍNSECA DEL PAR, INDEPENDIENTE DEL PUNTO ELEGIDO COMO ORIGEN DE COORDENADAS MÓDULO IGUAL AL PRODUCTO DE CUALQUIERA DE LAS FUERZAS POR EL BRAZO DEL PAR (DISTANCIA ENTRE LAS LÍNEAS DE ACCIÓN DE LAS DOS FUERZAS) DIRECCIÓN PERPENDICULAR AL PLANO DEFINIDO POR EL PAR DE FUERZAS. SU SENTIDO SE OBTIENE DE LA REGLA DEL SACACORCHOS
 DIRECCIÓN PERPENDICULAR AL PLANO DEFINIDO POR EL PAR DE FUERZAS. SU SENTIDO SE OBTIENE DE LA REGLA DEL SACACORCHOS.")
55
10. Dinámica del sólido rígido
ECUACIÓN FUNDAMENTAL DE LA DINÁMICA DE ROTACIÓN: Cuando se ejerce un par de fuerzas sobre un sólido rígido o se aplica una fuerza a un cuerpo con eje de giro, todos los puntos (a excepción de los del propio eje) realizan movimientos circulares con aceleración angular a. El momento de la fuerza se calcula con la ecuación: MOMENTO DE INERCIA (I): Oposición que presenta el cuerpo a modificar su estado de rotación (similar al papel de la masa en la traslación) Masa puntual: I = m·r2 Sistema de partículas:
 realizan movimientos circulares con aceleración angular a. El momento de la fuerza se calcula con la ecuación: MOMENTO DE INERCIA (I): Oposición que presenta el cuerpo a modificar su estado de rotación (similar al papel de la masa en la traslación) Masa puntual: I = m·r2. Sistema de partículas:")
56
11. Momento angular y energía de rotación
EL MOMENTO ANGULAR ES EL MOMENTO DE LA CANTIDAD DE MOVIMIENTO DE UNA MASA RESPECTO DE UN PUNTO O. DEPENDE DEL SISTEMA DE REFERENCIA ESCOGIDO SE MIDE EN kg·m2·s-1 IMPORTANTE PARA EL ESTUDIO DEL MOVIMIENTO PLANETARIO

57
11. Momento angular y energía de rotación
TEOREMA DEL MOMENTO ANGULAR O CINÉTICO: OBTENIDO AL DERIVAR EL MOMENTO ANGULAR RESPECTO DEL TIEMPO MOMENTO ANGULAR DEL SÓLIDO RÍGIDO: GIRO DE UN DISCO PLANO RESPECTO DEL EJE. MOMENTO ANGULAR DE CADA PARTÍCULA:

58
11. Momento angular y energía de rotación
CONSERVACIÓN DEL MOMENTO ANGULAR: CUANDO M=0, dL/dt=0, lo que supone que L=cte. Así, SI LA SUMA DE LOS MOMENTOS DE FUERZA EXTERIORES QUE ACTÚAN SOBRE UN CUERPO ES NULA, EL PRODUCTO DEL MOMENTO DE INERCIA POR LA VELOCIDAD ANGULAR SE MANTIENE CONSTANTE:

59
11. Momento angular y energía de rotación
ENERGÍA CINÉTICA DE ROTACIÓN: EN UN SÓLIDO RÍGIDO, PODEMOS DESCOMPONER EL MOVIMIENTO EN DOS COMPONENTES:

Presentaciones similares