Descargar la presentación
La descarga está en progreso. Por favor, espere

1
SIMPCE (Simulador de Movilidad de Personas en Espacios Cerrados)
Andrés Camilo Galvis Rodríguez Juan Felipe González Gómez Director: Fabio Antonio Avellaneda Pachón

2
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

3
Contexto del problema Edificaciones más seguras para el hombre.
Elaboración de planes de evacuación adecuados, para evitar muertes. Los simulacros presentan deficiencias al no enfrentar a los participantes a una emergencia real. Solución: desarrollar un simulador que va a recrear el comportamiento de las personas en una situación de emergencia real basándose en teorías de la conducta humana.

4
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

5
Objetivo General Desarrollar un modelo de simulación para la movilidad de personas en espacios cerrados en situaciones de emergencia.

6
Objetivos específicos
Realizar una caracterización de los comportamientos de las personas en situaciones de emergencia basados en estudios psicológicos. Realizar un proceso de selección de una tecnología de simulación que se ajuste a las características de la situación a recrear. Proponer un modelo de simulación que integre las variables encontradas en el estudio psicológico para representar el comportamiento de un grupo de personas ubicadas en un espacio cerrado el cual debe ser evacuado. Validar el modelo propuesto a partir del desarrollo de un prototipo de software.

7
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

8
Metodología Fases: Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo

9
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

10
Caracterización del comportamiento humano en situaciones de emergencia
Las actividades de esta fase son: Identificación y reunión con profesionales en el área de psicología. Recopilación, lectura y análisis de literatura relacionada con estudios psicológicos. Consulta a personal experto en el tema para la resolución de interrogantes surgidos en el análisis del material recopilado. Realizar la caracterización del comportamiento humano en situaciones de emergencia con base en la información obtenida. Validar la caracterización con los expertos.

11
Caracterización del comportamiento humano en situaciones de emergencia (Continuación)
Resultados encontrados: Reacciones condicionadas por el sexo. Reacciones condicionadas por el nivel de conocimiento del sitio. Reacciones condicionadas por la compañía. Reacciones condicionadas por la edad. Pánico y sentido de orientación. Contraflujo de peatones. Cuellos de Botella. Poster presentado en el II Congreso de Neurociencia y Neuropsicología.

12
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

13
Selección de la tecnología
Las actividades de esta fase son: Identificar características necesarias. Identificar y explorar las tecnologías relevantes en simulación. Elegir la tecnología que más se ajuste a las necesidades planteadas.

14
Selección de la tecnología (continuación)
Tecnologías M1: Modelado Macroscópico. M2: Modelado Microscópico de entidades con utilización de colas y funciones estocásticas. M3: Teoría de juegos. M4: Autómatas celulares. M5: Sistemas Multiagentes. M6: Modelo de fuerzas sociales.

15
Selección de la tecnología (continuación)
Características deseadas del paradigma de simulación: C1: facilidad de Implementar reglas complejas de comportamiento. C2: facilidad de Implementar comportamientos heterogéneos. C3: El modelo corresponde a la realidad tangible. C4: Soporta fácilmente múltiples instancias de personas. C5: Posibilidad de implementar fácilmente en el modelo múltiples estados.

16
Selección de la tecnología (continuación)
C6: El proceso de computación para cantidades grandes de personas es relativamente rápido. C7: Facilidad de realizar seguimiento a los entes del sistema durante la simulación. C8: Facilidad para visualizar dinámicamente el estado del sistema. C9: Capacidad de representar situaciones donde la densidad de entidades del sistema es muy alta. C10: Permite modelar de manera explícita mecanismos de comunicación entre las entidades del sistema.

17
Selección de la tecnología (Continuación)
Realizar un proceso de selección de una tecnología de simulación que se ajuste a las características del problema. Actividades: 1. Definir las características necesarias que debe satisfacer la tecnología de simulación en función de recrear el problema. 2. Identificar las tecnologías más relevantes en el desarrollo de simuladores que recrean problemas de características similares. 3. Explorar las tecnologías en busca de sus beneficios y limitantes para la realización del modelo. 4. Elegir la tecnología que más se ajuste a las necesidades planteadas.

18
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

19
Modelo de agentes Actividades : Estudiar la tecnología seleccionada.
Consultar a expertos. Diseñar un modelo de simulación que realice una representación de las caracterizaciones encontradas en la primera fase.

20
Agentes Persona Escapista Rescatista Habitación

21
Agente Persona Sensores Actuadores Visiotrón Audiotrón Positrón
Forzatrón Parlatrón

22
Agente Escapista Reacciones condicionadas por:
El conocimiento del sitio La compañía (solo y dependiente) Sexo La edad El pánico
 Sexo. La edad. El pánico.")
23
Agente Rescatista Area de responsabilidad
Comunica a las demás personas a partir de su Parlatrón un mensaje de guía.

24
Agente Habitacion Simular el modelo físico utilizando variables como masa, velocidad y fric-ción para predecir los efectos bajo diferentes condiciones Informar a los agentes persona de su posición actual vía positrón. Informar a los agentes persona de los objetos y otros agentes ubicados en su rango visual respectivo vía visiotrón. Recibir los mensajes verbales provenientes de parlatrones de los emisores y redirigirlos a los receptores vía audiotrón.

25
Agente Habitación

26
Mensajes entre agentes
Mensaje de pánico Mensaje de calma Mensaje de búsqueda Mensaje de Localización. Mensaje de guía Mensaje de auxilio

27
Diagrama de agentes

28
Diagrama de agentes (Continuación)
")
29
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

31
Prototipo y validación del prototipo
Las actividades de esta fase son: Establecer las necesidades que debe satisfacer la plataforma a utilizar. Identificar y explorar las plataformas o herramientas de software que más se ajusten para el desarrollo del prototipo. Elegir la plataforma más adecuada. Desarrollar el prototipo. Realizar la validación del modelo.

32
Validacion (0 s)
")
33
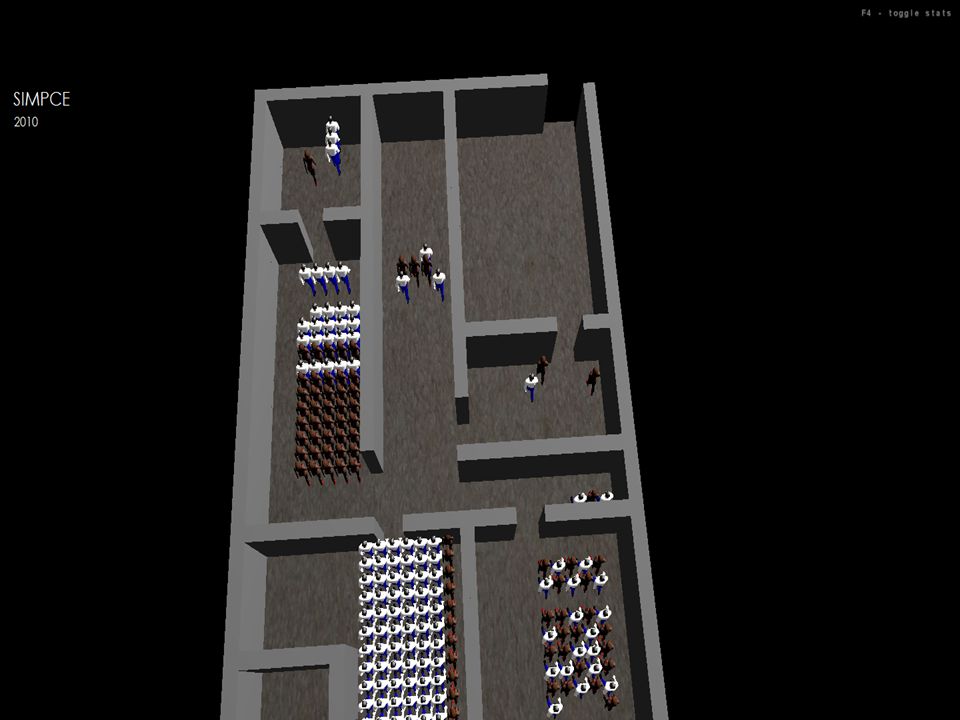
Validacion (10 s)
")
34
Validacion (90 s)
")
35
Resultados

36
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

37
Conclusiones Comportamiento realista del prototipo.
La interdisciplinariedad enriquece el trabajo de grado. Identificación y utilización de conocimiento preexistente. Identificar el equilibrio en la rigurosidad de los procesos para la consecución de objetivos.

38
Agenda Contexto del problema Objetivos Metodología Conclusiones
General Específicos Metodología Caracterización del comportamiento humano en situaciones de emergencia Selección de la tecnología Modelo de agentes Prototipo y validación de prototipo Conclusiones Trabajos Futuros

39
Trabajo Futuro Realizar un simulador con todas las características del modelo. Ahondar en la investigación psicológica con el fin de enriquecer el modelo. Realizar una herramienta que integre de manera natural a los sistemas multiagentes con motores físicos y gráficos.

40
Agradecimientos Ingeniero Fabio Antonio Avellaneda Pachón nuestro director de trabajo de grado, a quien queremos agradecer su tiempo, su dedicación y su guía constante a lo largo de este trabajo. También, un agradecimiento muy grande al departamento de psicología, en especial al Semillero de Neurociencia y Neuropsicología Hippocampus de la Pontificia Universidad Javeriana Por último, pero no menos importante, queremos agradecer a nuestros padres. Helena de Galvis, Héctor Galvis, Martha Lucía Gómez, José Fernando González, quienes nos han apoyado durante todo el proceso. También un agradecimiento especial al Ingeniero Oscar Galvis Rodríguez por su guía en el desarrollo.

Presentaciones similares












![Ingeniería de Sistemas [UNI – NORTE]](/8/2346401/big_thumb.jpg "Ingeniería de Sistemas [UNI – NORTE]>")






