Descargar la presentación
La descarga está en progreso. Por favor, espere

1
POR: PROFESOR GABRIEL CONDE A. ESCUELA DE ESTADÍSTICA. UNIVALLE
COMENTARIOS SOBRE LAS IDEAS DE CAOS Y COMPLEJIDAD, SU GENESIS, SU DESARROLLO Y ACTUALIDAD POR: PROFESOR GABRIEL CONDE A. ESCUELA DE ESTADÍSTICA. UNIVALLE

2
INTRODUCCIÓN LA COMPLEJIDAD ESTUDIA LOS FENÓMENOS QUE SE CARACTERIZAN POR: Inestabilidades, fluctuaciones, emergencia, auto-organización, no linealidad, bucles de realimentación, equilibrios dinámicos, rupturas de simetría, caos determinístico. (Básicamente es el estudio de la dinámica no-lineal)
.")
3
SOBRE EL DETERMINISMO

4
RECONOCIMIENTO DE FENÓMENOS MODELABLES:
DETERMINISTICAMENTE Ó ALEATORIAMENTE (PROBABILIDAD, ESTADÍSTICA)
")
5
PIERRE SIMON LAPLACE ( ): En publico su obra “Teoría Analítica de las Probabilidad” en ella establece la definición clásica de probabilidad, generalizó y amplio el uso del teorema de De Moivre y sistematizó el uso del análisis matemático dentro del cálculo de probabilidades. En 1814 publicó una 2a edición de la “Teoría Analítica de las Probabilidades” e incluyó además el “Ensayo Filosófico Sobre las Probabilidades”.

6
EL SIGUIENTE TEXTO TOMADO DEL LIBRO DE LAPLACE EXPRESA LO QUE PARECE UN DETERMINISMO EXTREMO. “Una inteligencia que, en un momento determinado, conociera todas la fuerzas que animan la naturaleza, así como la situación respectiva de los seres que la componen, si además fuera lo suficientemente amplia como para someter a análisis tales datos, podría abarcar en una sola fórmula los movimientos de los cuerpos más grandes del universo y los del átomo más ligero; nada le resultaría incierto y tanto el futuro como el pasado estarían presentes a sus ojos”.

7
PERO ESTE OTRO TEXTO NOS AFIRMA PORQUE LAPALCE ESTUDIÓ LAS PROBABILIDADES: “El espíritu humano ofrece, en la perfección que ha sabido dar a la astronomía, un débil esbozo de esta inteligencia. Sus descubrimientos en mecánica y geometría le han puesto en condiciones de abarcar en las mismas expresiones analíticas los estados pasados y futuros del sistema del mundo…Todos los esfuerzos por buscar la verdad tienden a aproximarlo continuamente a la inteligencia que acabamos de imaginar, pero de la que siempre permanecerá infinitamente alejado”.

8
MODELOS DETERMINISTICOS CASCADAS Y SISTEMAS DE ECUACIONES DIFERENCIALES
Estas ecuaciones las enmarcamos dentro de la teoría de los sistemas dinámicos. Muchas de ellas modelan sistemas físicos que dependen del tiempo e involucran cantidades (o cambios de esas cantidades) importantes en la descripción de un fenómeno.
 importantes en la descripción de un fenómeno.")
9
MODELOS CON SISTEMAS DE ECUACIONES DIFERENCIALES
SISTEMAS DINÁMICOS Stephen Smale, años 60’s Asocia al estudio de los sistemas de ED elementos topológicos

10
UN MODELO DE ESTE TIPO Lo que nos dice en la práctica es: “Supongamos que en un instante dado conocemos la posición y la velocidad de un cuerpo, las ecuaciones nos proveen una regla que se aplica a dichos números, para obtener la posición y la velocidad en el instante siguiente. La regla se sigue aplicando una y otra vez hasta obtener una trayectoria o unos valores en un instante deseado”. (Stewart I. 1991)
.")
11
DESDE LO DISCRETO Un sistema de k variables que evoluciona en el tiempo puede estudiarse como una variable vectorial x Rk dependiente de la variable temporal t, de tal manera que el estado xn+1 del sistema en el instante n + 1 se obtiene del estado xn del sistema en el período anterior a través de cierta función vectorial f mediante la relación xn+1 = f(xn).
.")
12
Estos sistemas se llaman “sistemas dinámicos discretos”
Estos sistemas se llaman “sistemas dinámicos discretos”. Aquí es posible obtener la secuencia x0, x1, …, xn de sucesivos estados del sistema (órbita de x0) de forma que: x1 = f(x0), x2 = f(x1) = f2(x0), x3 = f(x2) = f3(x0), …, xn = fn(x0).
 de forma que: x1 = f(x0), x2 = f(x1) = f2(x0), x3 = f(x2) = f3(x0), …, xn = fn(x0).")
13
DESDE LO CONTINUO Sistemas dinámicos autónomos que se modelan con las formas dx/dt = f(x(t)).
).")
14
Para un sistema dinámico TC con parámetros μ := (μ1, μ2,
Para un sistema dinámico TC con parámetros μ := (μ1, μ2,..., μσ) y variables de estado x(t) := (x1(t), x2(t),..., xg(t)) el cambio del estado del sistema se describe por el conjunto de ecuaciones diferenciales:
 y variables de estado x(t) := (x1(t), x2(t),..., xg(t)) el cambio del estado del sistema se describe por el conjunto de ecuaciones diferenciales:")
15
Se puede escribir: x = F(x, t; μ) Donde x y F son vectores de la forma: x := , F := Se requiere además un estado inicial del sistema x0 = (x1(t0), x2(t0), ..., xg(t0)) = x(t0).
 Donde x y F son vectores de la forma: x := , F := Se requiere además un estado inicial del sistema x0 = (x1(t0), x2(t0), ..., xg(t0)) = x(t0).")
16
A partir del estado inicial se puede determinar el estado del sistema en cualquier instante de tiempo por la relación: x(t) = x(t0) +
 = x(t0) +")
17
Para un sistema dinámico de TD tenemos las relaciones de tipo “cascada”
En forma más compacta se escribe: xn+1 = G(xn; μ) También se debe especificar la condición inicial x0 :=
 También se debe especificar la condición inicial x0 :=")
18
Si f es lineal tenemos invariantes y atractores sencillos
Si f es lineal tenemos invariantes y atractores sencillos. Si f es no lineal (así sea muy simple) podemos tener invariantes y atractores complicados que definen dinámicas complejas y la obtención de soluciones se complica.
 podemos tener invariantes y atractores complicados que definen dinámicas complejas y la obtención de soluciones se complica.")
19
ELEMENTOS DE LOS SISTEMAS DINÁMICOS
LA VARIABLE INDEPENDIENTE t PARÁMETROS Y ESPACIO PARAMÉTRICO VARIABLES DE ESTADO ESPACIO DE FASE ECUACIONES (REGLA) SOLUCIONES ATRACTORES, CUENCAS, CICLOS LÍMITES.
 SOLUCIONES. ATRACTORES, CUENCAS, CICLOS LÍMITES.")
20
LO ESTABLE

21
ESTABILIDAD DE LYAPUNOV
Consideremos un fenómeno físico descrito por el sistema de ecuaciones: dx/dt = f1(x, y, t) dy/dt = f2(x, y, t) La solución x(t, x0, y0); y(t, x0, y0) con condiciones iniciales x = x(t0) = x0; y = y(t0) = y0 se llama solución estable en el sentido Lyapunov si para todo t > t0 las soluciones x(t, x0, y0); y(t, x0, y0) experimentan cambios pequeños para modificaciones suficientemente pequeñas en los valores iniciales x0, y0
 dy/dt = f2(x, y, t) La solución x(t, x0, y0); y(t, x0, y0) con condiciones iniciales x = x(t0) = x0; y = y(t0) = y0 se llama solución estable en el sentido Lyapunov si para todo t > t0 las soluciones x(t, x0, y0); y(t, x0, y0) experimentan cambios pequeños para modificaciones suficientemente pequeñas en los valores iniciales x0, y0.")
22
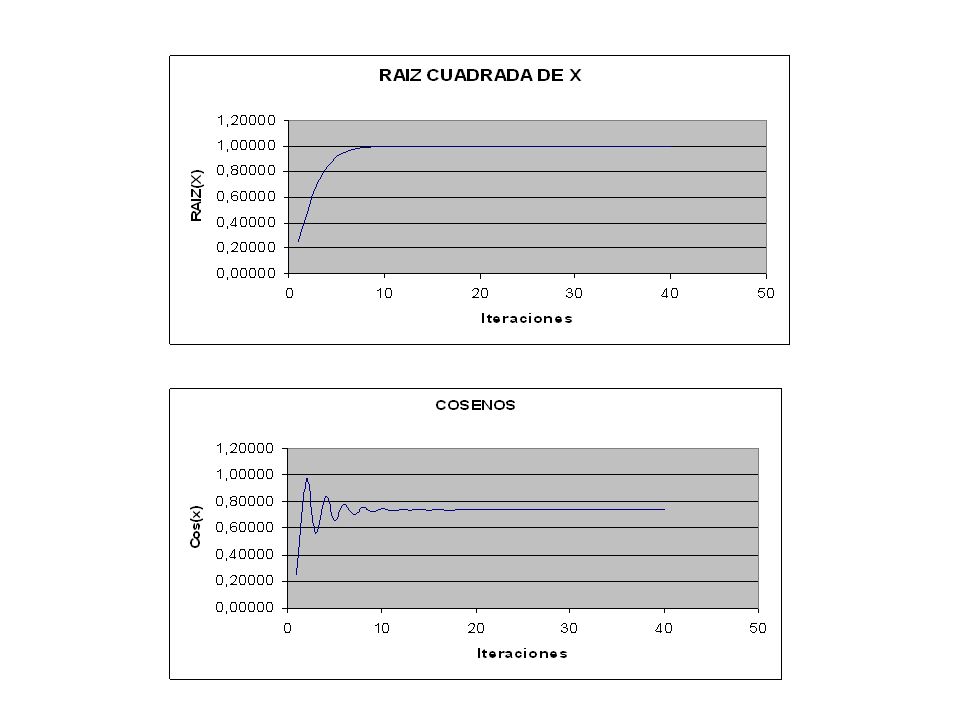
Ejemplos de sistemas dinámicos con soluciones estables:
Las cascadas discretas definidas por funciones tales como: f(x) = x2, f(x) = x, f(x) = 1/x, f(x) = cox(x), f(x) = x2 - 1 ..\..\Astronomia\EMULADOR HP48\Emu48.exe
 = x2, f(x) = x, f(x) = 1/x, f(x) = cox(x), f(x) = x \..\Astronomia\EMULADOR HP48\Emu48.exe.")
26
Si un fenómeno natural se asocia a un modelo de este tipo podríamos decir que el fenómeno es estable y que dicha estabilidad se refleja en las soluciones (convergencia).
.")
27
EL UNIVERSO NOS SUGIERE CIERTA CONFIANZA:
Con los sistemas dinámicos y un poco de geometría podemos representar los movimientos celestes y se pueden predecir: estaciones, eclipses determinar: fiestas, siembras ayudar: a la navegación.

28
LO INESTABLE

29
CAMINOS O VISIONES Desde la mecánica celeste (P3C)
Desde la teoría de los fluidos Desde la irreversibilidad (termodinámica) Desde los osciladores no lineales Desde las Matemáticas (ED, Análisis, Geometría, Topología) Desde la computación
 Desde los osciladores no lineales. Desde las Matemáticas (ED, Análisis, Geometría, Topología) Desde la computación.")
30
La importancia de la determinación del estado inicial del sistema
La importancia de la determinación del estado inicial del sistema. Sensibilidad a las condiciones iniciales (SCI) está asociada a la incapacidad de predecir
 está asociada a la incapacidad de predecir.")
31
Las primeras ideas sobre la SCI (2ª mitad del s XIX) Los ingenieros franceses: Barré de Saint Venant ( ) Joseph Boussinesq ( ) Soluciones de ED de los fluidos en la vecindad de puntos singulares.
 Los ingenieros franceses: Barré de Saint Venant ( ) Joseph Boussinesq ( ) Soluciones de ED de los fluidos en la vecindad de puntos singulares.")
32
Henry Poincaré “Una causa muy pequeña, que se nos escapa, determina un efecto considerable que no podemos prever y entonces decimos que dicho efecto de debe al azar” (Aborda el P3C)
")
33
Max Born ( ) (Físico alemán PN 1954) “¿Is Classical Mechanics in Fact Deterministic?” (1955) Estudia el modelo de una partícula que viaja entre obstáculos fijos como modelos de conductividad. Concluye: El determinismo de la M. Clásica es una falsa apariencia debido a que no es posible determinar con absoluta precisión las C.I. de un sistema físico

34
Richard Feynman Encontramos referencias en sus “Lecturas de Física” V1
Richard Feynman Encontramos referencias en sus “Lecturas de Física” V1. “La incertidumbre no es propia de la mecánica cuántica solamente, es una característica en la determinación de las C.I. en la mecánica clásica”

35
Jacob Sinai (En la década de 1970) En el sistema de “obstáculos” de Lorenz considera el movimiento de un punto en un sistema plano con obstáculos convexos (billar de Sinai). Probó en forma rigurosa que una pequeña desviación en el estado inicial de un sistema, produce grandes cambios en su evolución posterior.

36
SOLUCIONES INESTABLES
Ejemplos de sistemas dinámicos con soluciones inestables: Las cascadas discretas definidas por funciones tales como: f(x) = x2 – 1 VS f(x) = 2x2 - 1 ..\..\Astronomia\EMULADOR HP48\Emu48.exe
 = x2 – 1 VS f(x) = 2x \..\Astronomia\EMULADOR HP48\Emu48.exe.")
37
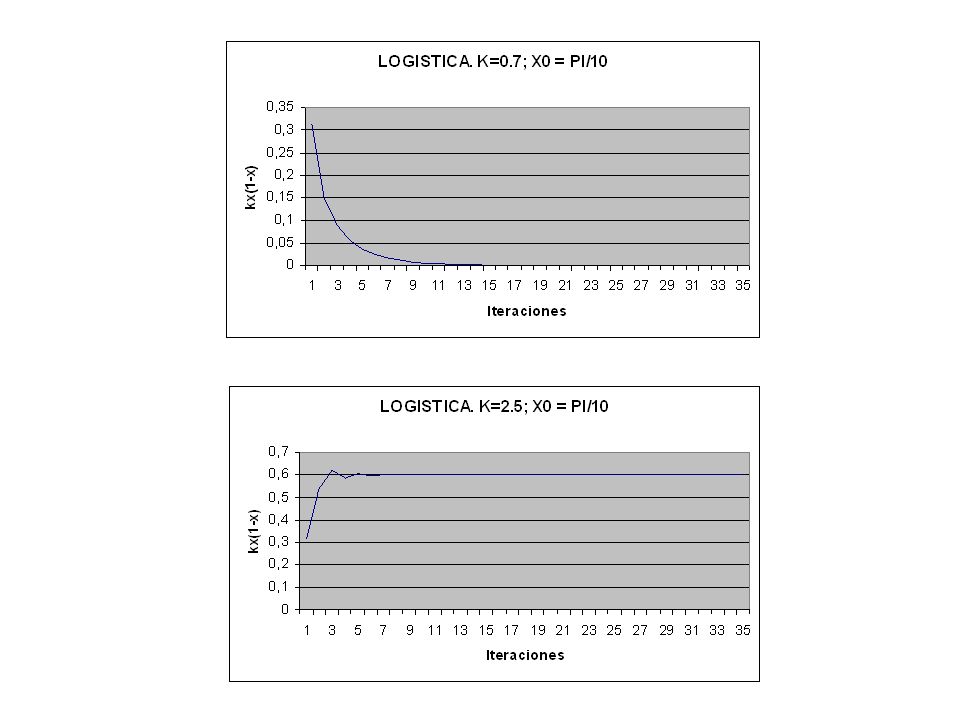
Un modelo matemático muy estudiado: El modelo logístico.
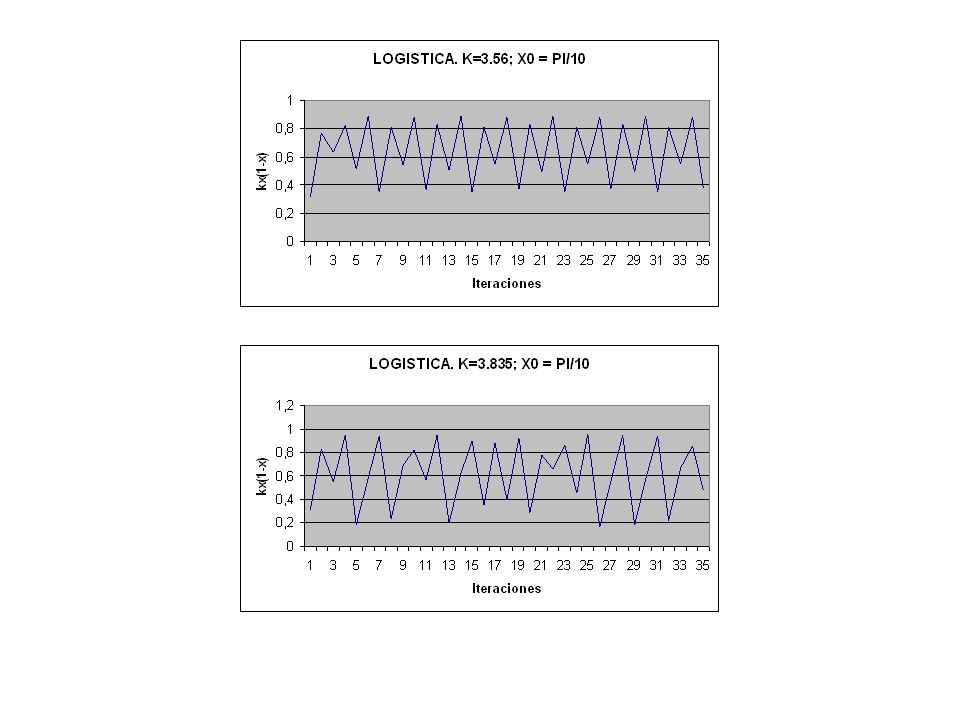
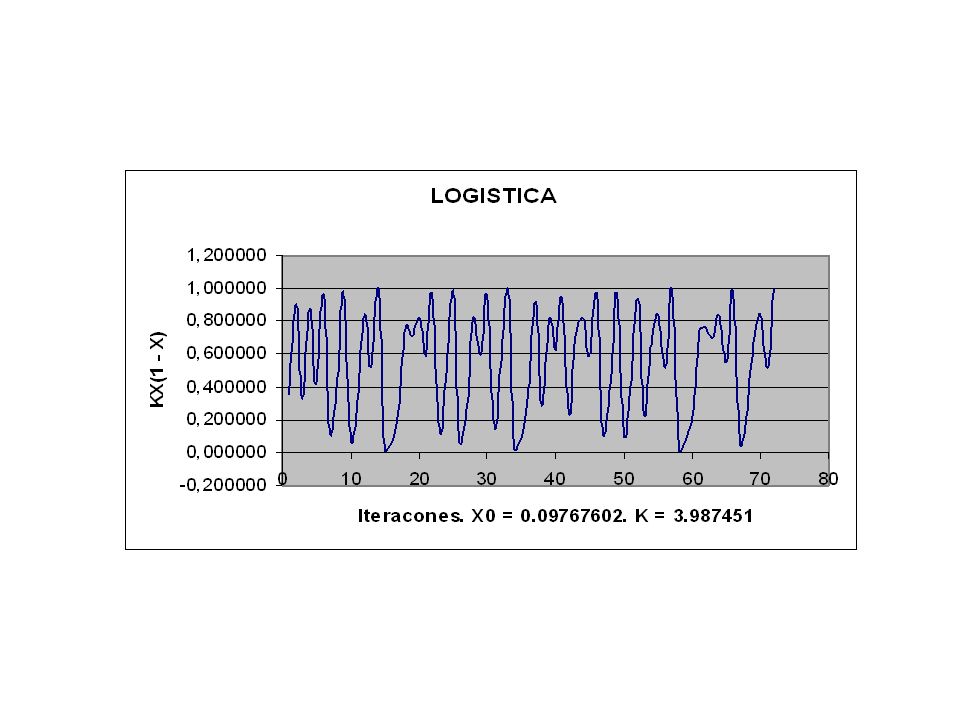
OTRO EJEMPLO Un modelo matemático muy estudiado: El modelo logístico. La iteración de la función: f(x) = K.x.(1 – x), 0 < x < 1 Se llama cascada logística. La dinámica queda definida por: xn+1 = kxn(1 – xn) Es interesante su estudio para 0 K 4
 = K.x.(1 – x), 0 < x < 1 Se llama cascada logística. La dinámica queda definida por: xn+1 = kxn(1 – xn) Es interesante su estudio para 0 K 4.")
44
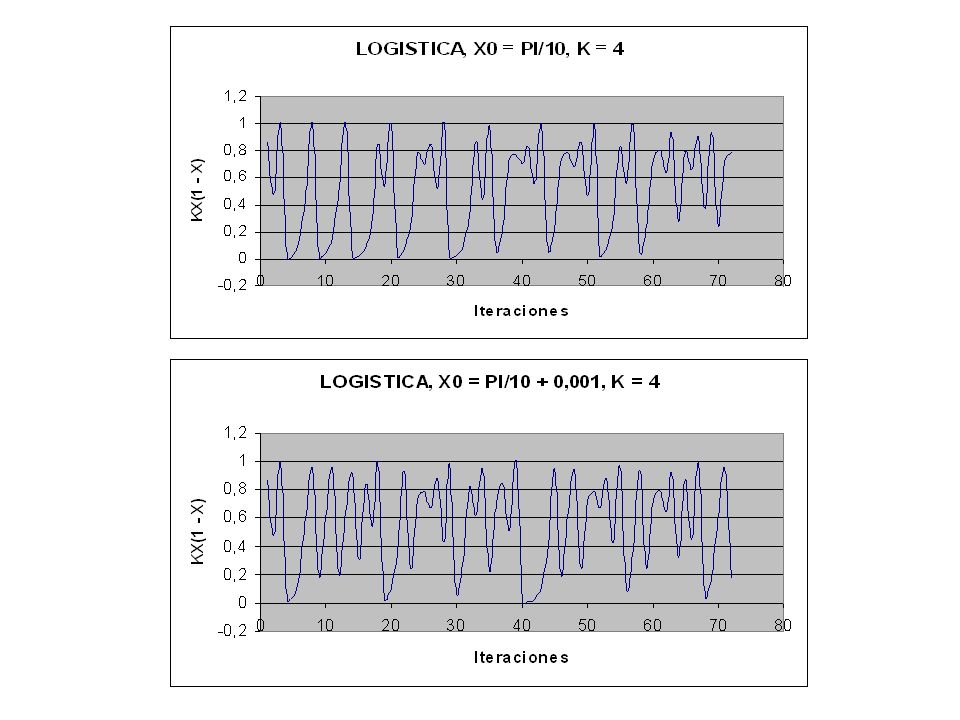
Sensibilidad a las condiciones iniciales.
(una característica del caos detreministico) Los gráficos siguientes corresponden a 200 iteraciones para dos valores iniciales muy próximos en la cascada logística con K = 4.
 Los gráficos siguientes corresponden a 200 iteraciones para dos valores iniciales muy próximos en la cascada logística con K = 4.")
46
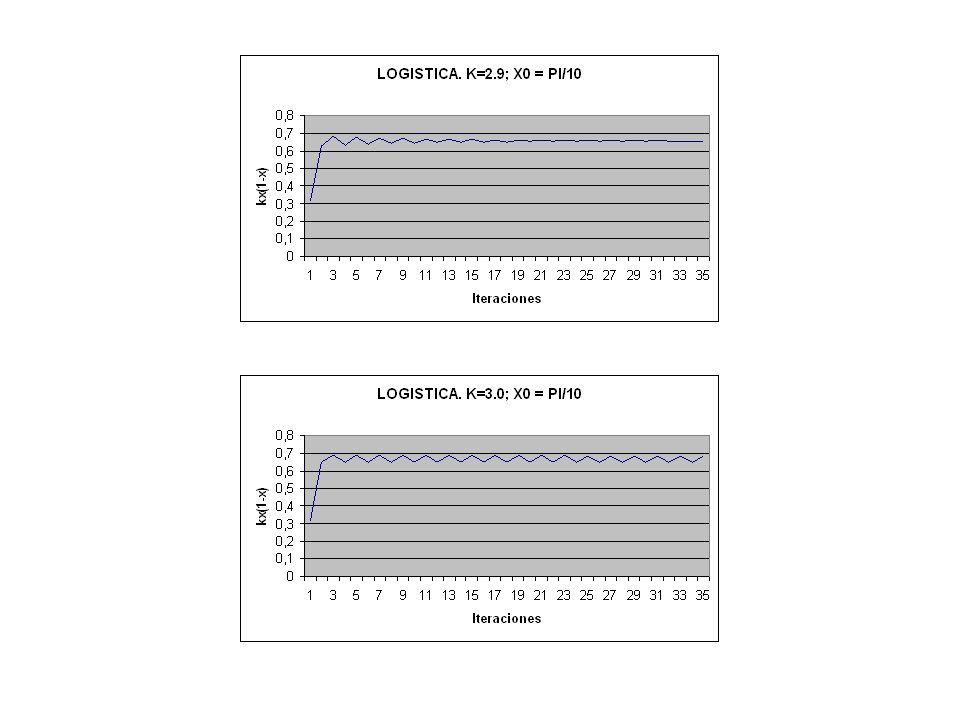
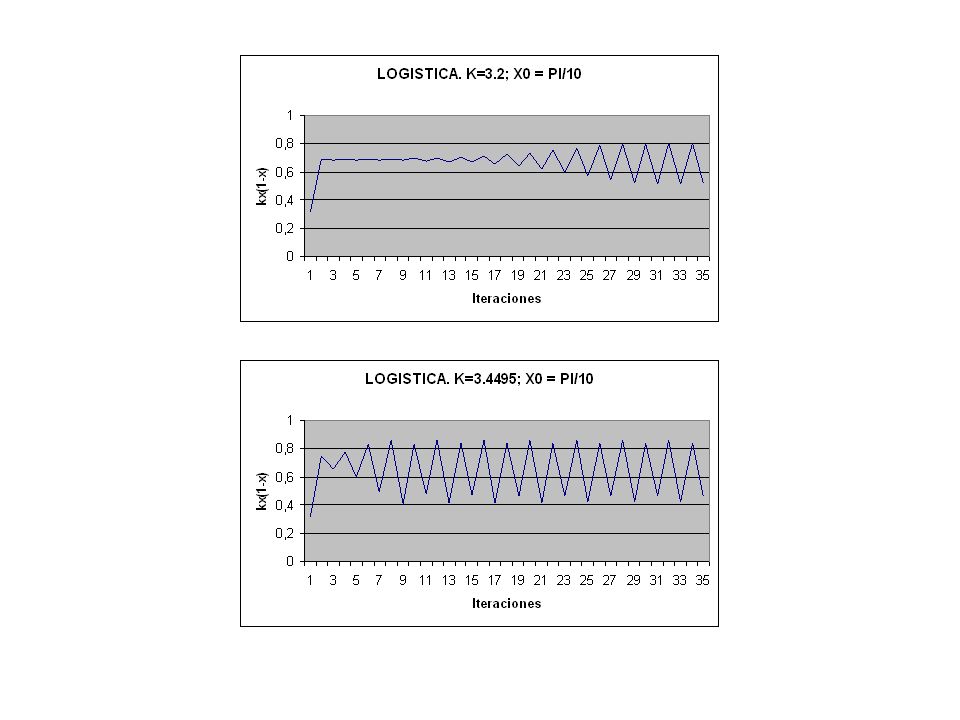
Algunos comportamientos
0 < K < 3 Régimen estacionario k = 3 Marginalmente estable, convergencia lenta. k = 3.2 Periódico, con período 2 k = 3.5 Período 4; k = 3.56 Período 8; K = Período k = 3.58 Período infinito (duplicación infinita) k = Período 3 eventual, después período 2 k = Período 5 eventual. k = 4 Comportamiento caótico
 k = Período 3 eventual, después período 2. k = Período 5 eventual. k = 4 Comportamiento caótico.")
48
Auto-similaridad = Invarianza a escala

49
La ecuación logística Xsig = K (l - X) X k = 2.7
 X k = 2.7")
50
Iteración de la ecuación logística para K = 2. 7
Iteración de la ecuación logística para K = 2.7. Presencia de un atractor.

51
Iteración de la ecuación logística para K= 3. 15
Iteración de la ecuación logística para K= Presencia de dos atractores con valores Xl y X2.

52
ALGUNOS COMPORTAMIENTOS DE LA FUNCION LOGISTICA. xn+1= kxn(1 – xn)
K = K = 1.0

53
k = k = 2.0

54
K = K = 3.0

55
K = K = 3.5

56
K = K = 4.0

57
K = K =

58
EL ORDEN EN QUE APARECEN LOS PERIODOS EN EL MODELO LOGISTICO:
Teorema: Si para un valor dado de k, la aplicación logística tiene un ciclo de período p, entonces también debe haber tenido de período q tal que p q Se escriben los enteros positivos en el siguiente orden: 3 5 7 9 11 .... 6 10 14 18 22 .... 12 20 28 36 44 .... 3.2n 5.2n 7.2n 9.2n .... 2m 2m-1 .... 32 16 8 4 2 1. #s Feingenbaum, F = (factor de escala) Q = (proporción en que se abren las ramas)
 Q = (proporción en que se abren las ramas)")
59
UNA PREGUNTA FUNDAMENTAL
Conocidas las relaciones matemáticas que definen un sistema dinámico a través de un sistema de ecuaciones diferenciales, deberá ser posible calcular las soluciones en cualquier tiempo y explorar lo que la dinámica nos proporciona. ¿Será esto así? (Por ejemplo en el SS interactúan masas a través de fuerzas de gravedad y sus relaciones matemáticas entre fuerzas, masas y distancias son conocidas desde hace 300 años).
.")
60
¿Diversas influencias entre los elementos de un sistema producirán sólo cambios ligeros? o ¿estas pueden conducir con el tiempo a cambios radicales e irreversibles? Por ejemplo: ¿Seguirán los planetas describiendo más o menos las mismas trayectorias siempre?

61
Observaciones en el tiempo revelan sutiles desviaciones de los patrones de estabilidad que sugieren a su vez otros patrones de mayor alcance.

62
Estas son preguntas que plantean el problema de la estabilidad (inestabilidad) de los sistemas dinámicos. Las ideas sobre caos tiene mucho que ver con esto de la inestabilidad.

63
Actualmente estos problemas se resuelven con aproximaciones que requieren muchos cálculos. Con altas precisiones se pueden “explorar” los sistemas dinámicos y encontrar sutilezas o “rarezas” dinámicas.

64
UNA PARADOJA ¿Un sistema dinámico determinístico produciendo comportamientos erráticos e impredecibles? “Tanto en ciencias (físicas) como en matemáticas caos es el témino técnico usado ahora para describir tal actividad errática (la del problema de los tres cuerpos). Aplicado por primera vez en 1975 por el matemático James Yorke, el caos se refiere al comportamiento aparentemente impredecible de un sistema determinista gobernado por leyes expresadas matemáticamente” [I. Peterson (1995)]
 como en matemáticas caos es el témino técnico usado ahora para describir tal actividad errática (la del problema de los tres cuerpos). Aplicado por primera vez en 1975 por el matemático James Yorke, el caos se refiere al comportamiento aparentemente impredecible de un sistema determinista gobernado por leyes expresadas matemáticamente [I. Peterson (1995)]")
65
LA TEORÍA DEL CAOS “La mecánica y las leyes de la física tal como fueron enunciadas por I. Newton son mucho más ricas de lo que el propio Newton y sus sucesores creyeron. Estas ecuaciones encierran no solo lo predecible sino también lo errático.” (I. Peterson 1995)
.")
66
Estos sistemas poseen por lo menos tres ingredientes importantes: - Impredictibilidad (Sensibilidad a condiciones iniciales) - Imposibilidad de descomposición (Topológicamente transitiva) - Elementos de regularidad (Densidad de puntos periódicos)
 - Imposibilidad de descomposición (Topológicamente transitiva) - Elementos de regularidad (Densidad de puntos periódicos)")
67
POINCARÉ Y EL PROBLEMA DE LOS TRES CUERPOS (1908)
")
68
ECUACIONES PARA EL PROBLEMA REDUCIDO DE HILL m1 m2 masas de dos cuerpos grandes en las coordenadas (x1,y1) y (x2, y2) x12 = x2 – x1 y12 = y2 – y1 r212 = x212 – y212 Cuerpo pequeño en (x, y) r21 = (x-x1)2 + (y-y1)2 r22 = (x-x2)2 + (y-y2)2
 y (x2, y2) x12 = x2 – x1 y12 = y2 – y1 r212 = x212 – y212 Cuerpo pequeño en (x, y) r21 = (x-x1)2 + (y-y1)2 r22 = (x-x2)2 + (y-y2)2")
69
SECCION DE POINCARÉ

70
Una conclusión del trabajo de Poincaré: El problema de los tres cuerpos es muy difícil de resolver! Nos preguntamos: ¿Qué encontró Poincaré en el problema de los tres cuerpos que le daba este carácter?

71
ORBITAS: PROBLEMA DE LOS TRES CUERPOS

72
SIMULADOR GRAVITACIONAL
Cuerpo (m = 600 t, r = 40 km) girando alrededor de un sistema doble de estrellas SIMULADOR GRAVITACIONAL
 girando alrededor de un sistema doble de estrellas. SIMULADOR GRAVITACIONAL.")
73
Descubrió que algunos sistemas estudiados en la mecánica, relacionados con las ecuaciones de Hamilton, no siguen un comportamiento regular (esperado en aquella época*). Por el contrario siguen comportamientos impredecibles en el futuro. (*) ¿Que se esperaba?. Res/ Si el estado de un punto evoluciona en forma regular en el tiempo, se espera que un punto próximo evolucione en forma similar. (leer 164)
 ¿Que se esperaba . Res/ Si el estado de un punto evoluciona en forma regular en el tiempo, se espera que un punto próximo evolucione en forma similar. (leer 164).")
74
Sus comentarios los publicó en el libro “Ciencia y Método” en 1908
Sus comentarios los publicó en el libro “Ciencia y Método” en Encontramos frases como: “Una causa muy pequeña, que se nos escapa, determina un efecto considerable que no podemos prever y entonces decimos que dicho efecto de debe al azar” (leer )
")
75
CARACTERISTICAS DEL CAOS
Sensibilidad a las condiciones iniciales. Los gráficos siguientes corresponden a 200 iteraciones para dos valores iniciales muy próximos en la cascada logística con K = 4.

77
Se presentan estabilidades e inestabilidades Los sistemas se presentan de tal manera que comportamientos estables e inestables se entrelazan (conforme el concepto matemático de conjunto denso).
.")
78
Lo estable y lo inestable

79
LOS SISTEMAS DINÁMICOS TIENEN NATURALEZA DUAL
Las ecuaciones tienen una naturaleza dual y en todo sistema físico dinámico pueden presentarse los dos comportamientos: ordenado – predecible irregular – impredecible

80
ORDEN Y DESORDEN El juego del caos

81
Los sistemas caóticos poseen por lo menos tres ingredientes importantes: - Impredictibilidad (Sensibilidad a condiciones iniciales) - Imposibilidad de descomposición (Topológicamente transitiva) - Elementos de regularidad (Densidad de puntos periódicos)
 - Imposibilidad de descomposición (Topológicamente transitiva) - Elementos de regularidad (Densidad de puntos periódicos)")
82
Matemáticamente Definición: sean J y K dos conjuntos tales que JK. Decimos que J es denso en K si xK y >0, yJ tal que la d(x, y) < . Definición: decimos que f es topológicamente transitiva en D si para cualquier pareja de subconjuntos () abiertos A y B de D, existen a A y n 1 tales que f n(a) B.
 abiertos A y B de D, existen a A y n 1 tales que f n(a) B.")
83
Definición: f es sensible a las condiciones iniciales
en D, si > 0 tal que xD y > 0, existen y (x - , x + )D y n > 0 tales que f n(y) - f n(x) . Definición de caos: decimos que f es caótica en D si se cumplen las siguientes tres condiciones: El conjunto de puntos periódicos de f forman un conjunto denso. f es topológicamente transitiva en D. f es sensible a las condiciones iniciales en D
D y n > 0 tales que. f n(y) - f n(x) . Definición de caos: decimos que f es caótica en D si se cumplen las siguientes tres condiciones: El conjunto de puntos periódicos de f forman un conjunto denso. f es topológicamente transitiva en D. f es sensible a las condiciones iniciales en D.")
84
SISTEMAS DINÁMICOS SIMBÓLICOS
Un estado inicial expresado con un símbolo que cambia de acuerdo a unas reglas en la medida que transcurre el tiempo. Ejemplo: Reglas: a ab. b baa Inicio a ab abbaa abbaabaaabab

85
OTRO EJEMPLO, UN AUTÓMATA CELULAR: El juego de la vida
SIMULADOR

86
Autómatas celulares. Componentes básicos:
Un plano bidimensional o un espacio n-dimensional dividido en un número de subespacios homogéneos, conocidos como celdas. A todo esto se le denomina Teselación Homogénea. Cada celda puede estar en uno de un conjunto finito o numerable S de estados. Una Configuración C, la que consiste en asignarle un estado a cada celda del autómata. Una Vecindad definida para cada celda, la que consiste en un conjunto contíguo de celdas, indicando sus posiciones relativas respecto a la celda misma. Una Regla de Evolución, la cual define cómo debe cada celda cambiar de estado, dependiendo del estado inmediatamente anterior de su vecindad. Un Reloj Virtual de Cómputo conectado a cada celda del autómata, el cual generará "tics" o pulsos simultáneos a todas las celdas indicando que debe aplicarse la regla de evolución y de esta forma cada celda cambiará de estado.

87
SEGUNDA PARTE SOBRE LA COMPLEJIDAD

88
BIBLIOGRAFIA Peterson I. “El reloj de Newton”. Alianza Editorial. Madrid 1995. Stewart I. “¿Juega Dios a los dados?. La nueva matemática del caos”. Grijalbo Mondadori. Barcelona 1991. Braun E. “Caos, fractales y cosas raras”. Fondo de Cultura Económica. México 1996. Talanquer “Fractus, fracta, fractal. fractales, de laberintos y espejos”. Fondo de Cultura Económica. México 1996.

89
Lorenz Edward N. “La Esencia del Caos”. Editorial Debate, Madrid 1995.
Holmgren R. A. “A First Course in Discrete Dynamical Systems” 2a Edition. Springer-Verlag N. Y Robert L. Devaney. “An Introduction to Chaotic Dynamical Systems”.Addison Wesley Publishing Company. New York 1989. Barnsley M. “Fractals Everywhere” Morgan Kaufmann 1993

90
Campos D. y Isaza J. F. “Prolegómenos a los Sistemas Dinámicos”
Campos D. y Isaza J. F. “Prolegómenos a los Sistemas Dinámicos”. Universidad Nacional de Colombia, Bogotá 2002. Ott edward. “Chaos In Dynamical Systems”. Cambridge University Press, Canadá 1993. Mandelbrot B, “Los objetos fractales” Tusquets Editores 2000 Mandelbrot B, “La geometría fractal de la naturaleza”. Tusquets Editores 1997

91
Poincaré H. “Ciencia y Método”. Editorial Espasa-Calve S. A. 3a edición. Madrid 1963.
Poincaré H. “El Valor de la Ciencia”. Editorial Espasa-Calve S. A. 3a edición. Madrid 1964. Cambel A.B, “Applied Chaos Theory, A paradigm for complexity”, Academic Oress 1993

92
Nicolis G. Prigogine I. “La Estructura de lo Complejo”
Nicolis G. Prigogine I. “La Estructura de lo Complejo”. Alianza Editorial. Madrid 1995. Prigogine Ilya. “El fin de las certidumbres”. Editorial Taurus. Madrid 1997. De Guzmán Miguel y otros. “Estructuras Fractales y sus Aplicaciones”. Editorial Labor S. A. Barcelona 1993.

93
Simulador del Sistema Solar Celestia http://www.shatters.net/celestia
Solar System ver 1.0a Orbit Xplorer The non-Linear Lab

94
Curso de Geometría Fractal
Navarro José. Las Organizaciones como Sistemas Abiertos Alejados del Equilibrio (Tesis doctoral) Meiss J. D: “Frequently Asked Questions about Nonlinear Science” (Sci.nonlinear FAQ) Sep 2003
 Meiss J. D: Frequently Asked Questions about Nonlinear Science (Sci.nonlinear FAQ) Sep")
95
Palacios Jorge. “Una Nueva Concepción de Dterminismo”
Palacios Jorge. “Una Nueva Concepción de Dterminismo”. Ciencia al Dia Internacional Vol 1 Num

Presentaciones similares