Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Maracaibo, 26 de Mayo de 2006 Universidad del Zulia Facultad de Ingeniería División de Postgrado Maestría en Computación Aplicada Universidad del Zulia Facultad de Ingeniería División de Postgrado Maestría en Computación Aplicada presentado ante la Ilustre Universidad del Zulia para optar al Grado Académico de MAGISTER SCIENTIARUM EN COMPUTACIÓN APLICADA Lic. Daniel Ernesto Finol González C.I.: 13.081.834 presentado ante la Ilustre Universidad del Zulia para optar al Grado Académico de MAGISTER SCIENTIARUM EN COMPUTACIÓN APLICADA Lic. Daniel Ernesto Finol González C.I.: 13.081.834 Trabajo de Grado Optimización de Funciones utilizando Múltiples Modelos Sustitutos

2
Justificación del Estudio En distintas industrias frecuentemente se hace necesario optimizar funciones desconocidas. Esto se realiza mediante la evaluación de la función objetivo en distintos puntos. Para realizar esta optimización se requieren muchas evaluaciones. Pero las funciones son usualmente costosas de evaluar. Por lo que se debe construir un modelo que aproxime la función y realizar la optimización sobre él. En distintas industrias frecuentemente se hace necesario optimizar funciones desconocidas. Esto se realiza mediante la evaluación de la función objetivo en distintos puntos. Para realizar esta optimización se requieren muchas evaluaciones. Pero las funciones son usualmente costosas de evaluar. Por lo que se debe construir un modelo que aproxime la función y realizar la optimización sobre él.

3
Hipótesis de la Investigación La hipótesis de la presente investigación es que para tales problemas usar más de un modelo sustituto es un método eficaz de optimización global.

4
ObjetivosObjetivos Objetivo General Evaluar el desempeño relativo de una metodología de optimización global de funciones costosas basada en el uso de múltiples modelos sustitutos.

5
ObjetivosObjetivos Objetivos específicos Probar los algoritmos para la construcción de los modelos sustitutos considerados. Construir los modelos sustitutos correspondientes a los casos de estudio Optimizar / analizar la varianza de los estimadores asociados con cada uno de los modelos sustitutos considerados. Analizar y discutir los resultados. Probar los algoritmos para la construcción de los modelos sustitutos considerados. Construir los modelos sustitutos correspondientes a los casos de estudio Optimizar / analizar la varianza de los estimadores asociados con cada uno de los modelos sustitutos considerados. Analizar y discutir los resultados.

6
Casos de Estudio Se seleccionaron seis casos de estudio. Éstos se distinguen por tres características: –Alta o baja no–linealidad. –Alta o baja dimensionalidad. –Ruido aleatorio presente o no.

7
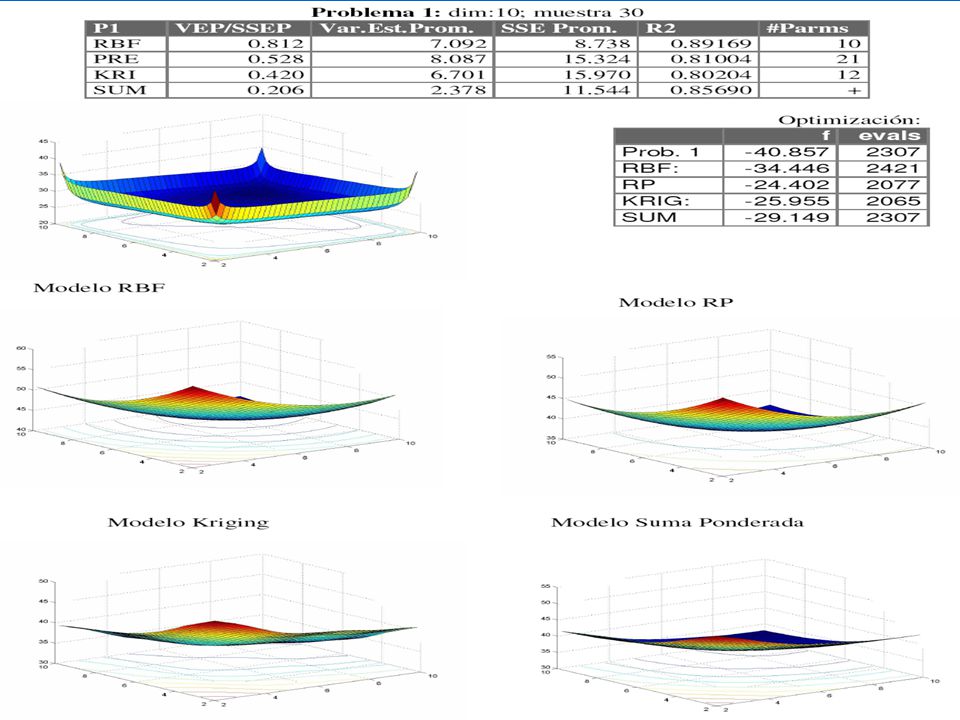
Caso de Estudio 1 (P1) Dimens:10 No–Lin:Alta Dimens:10 No–Lin:Alta
 Dimens:10 No–Lin:Alta Dimens:10 No–Lin:Alta")
8
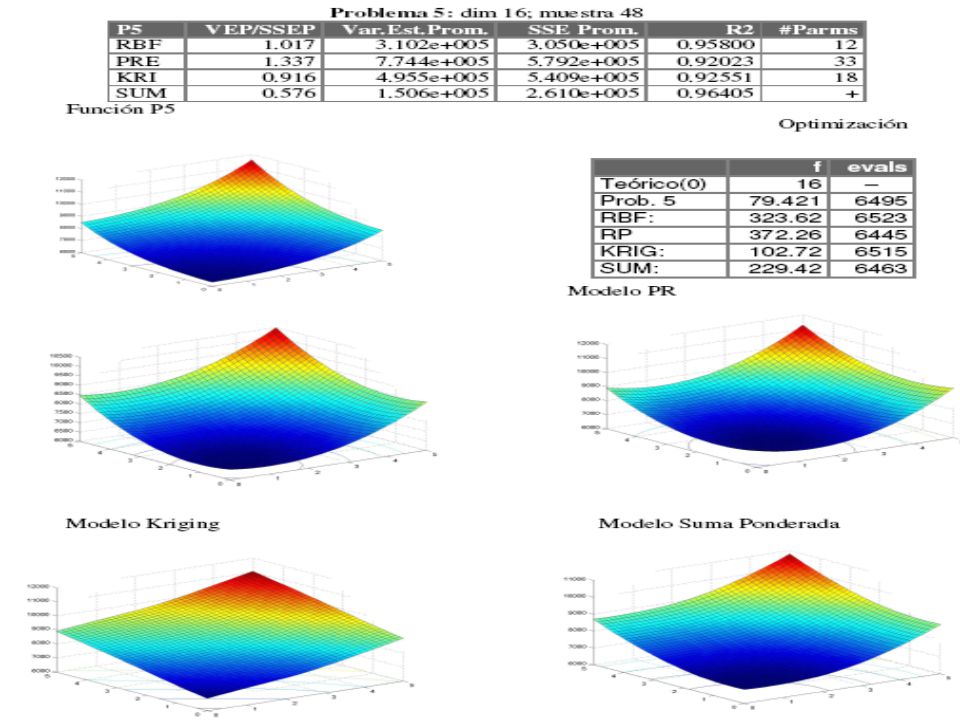
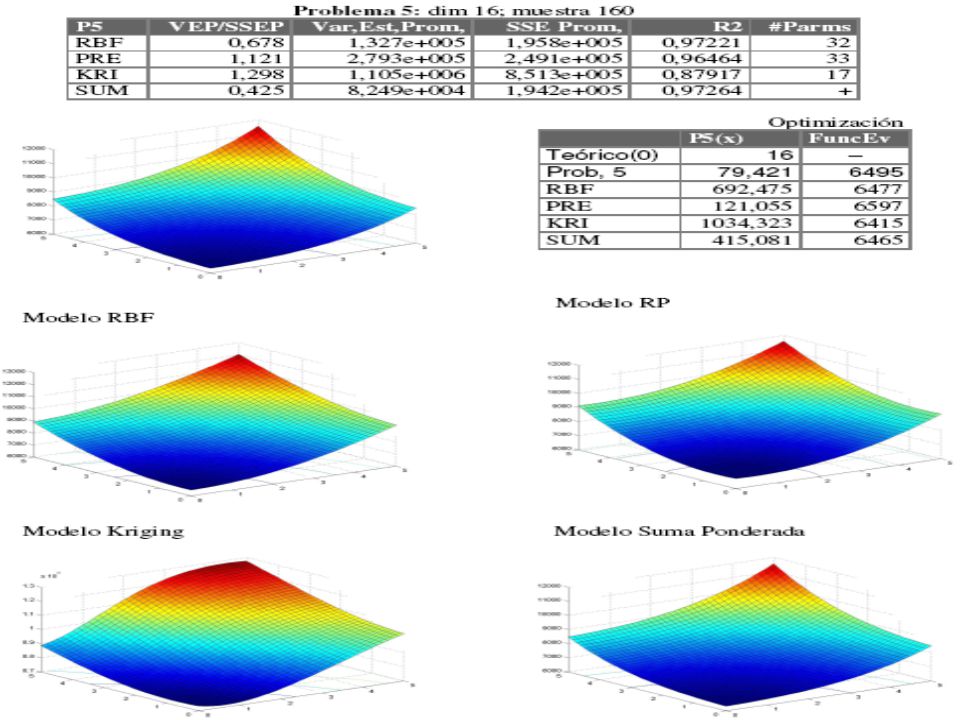
Caso de Estudio 2 (P5) Dimens:16 No–Lin:Baja Dimens:16 No–Lin:Baja
 Dimens:16 No–Lin:Baja Dimens:16 No–Lin:Baja")
9
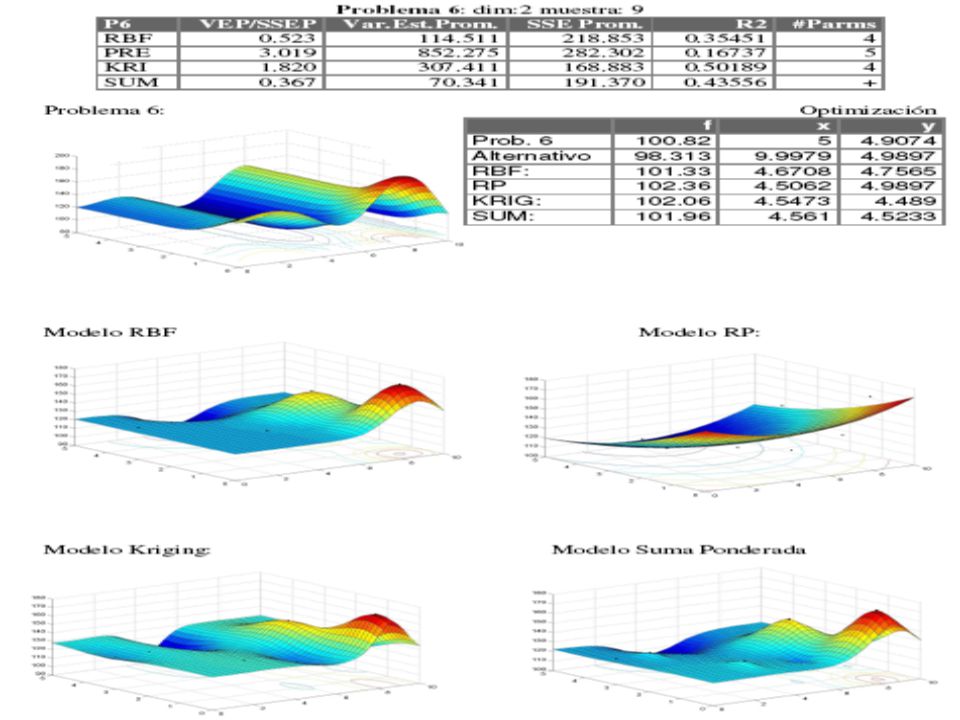
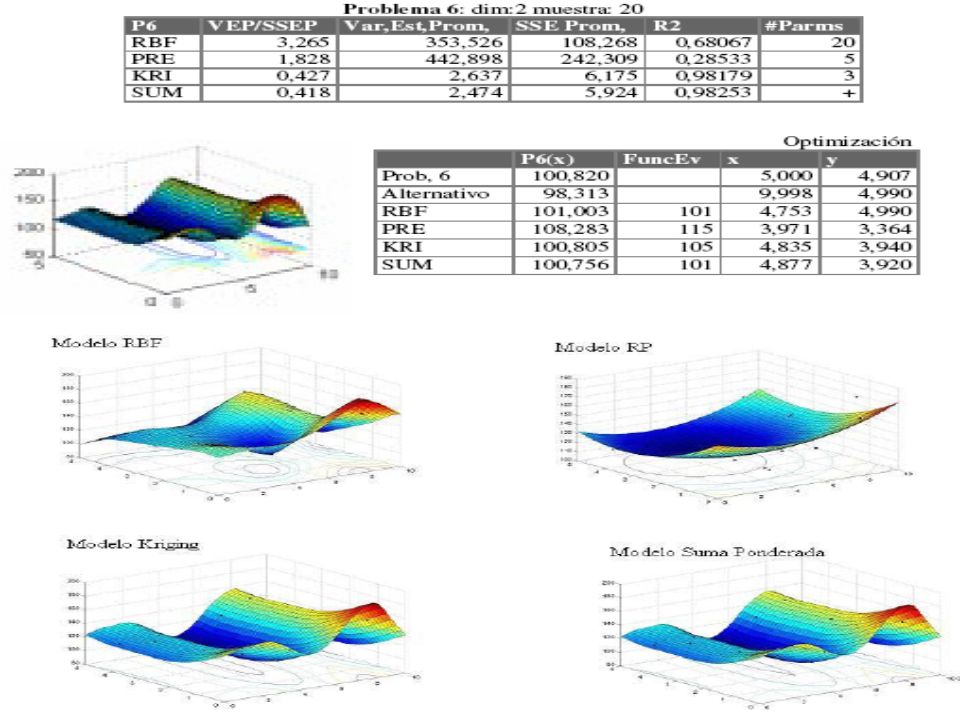
Caso de Estudio 3 (P6) Dimens:2 No–Lin:Alta Dimens:2 No–Lin:Alta
 Dimens:2 No–Lin:Alta Dimens:2 No–Lin:Alta")
10
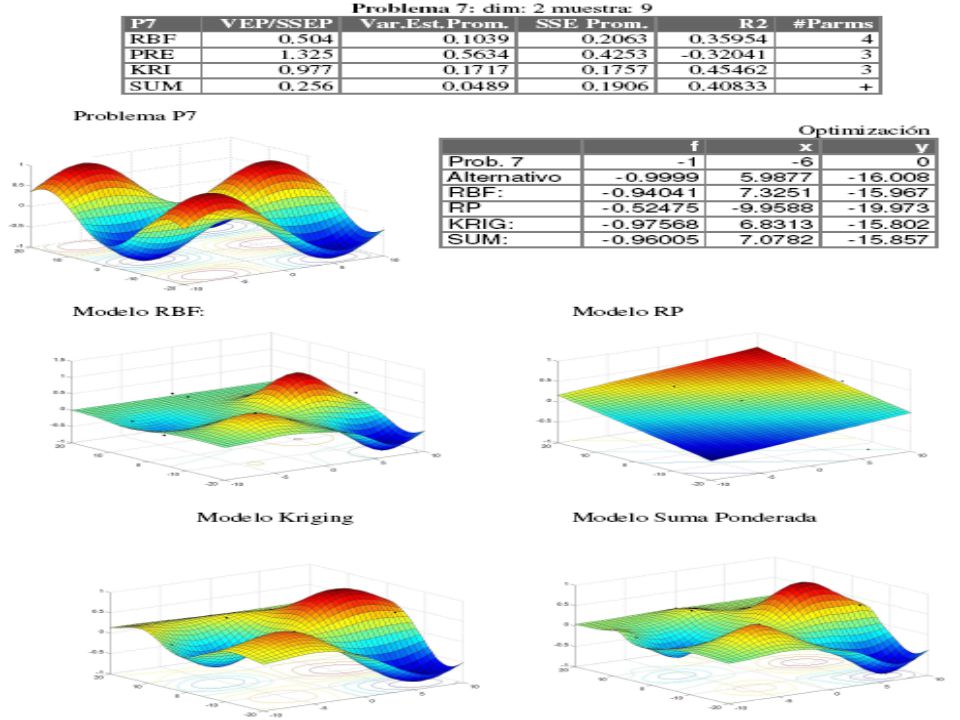
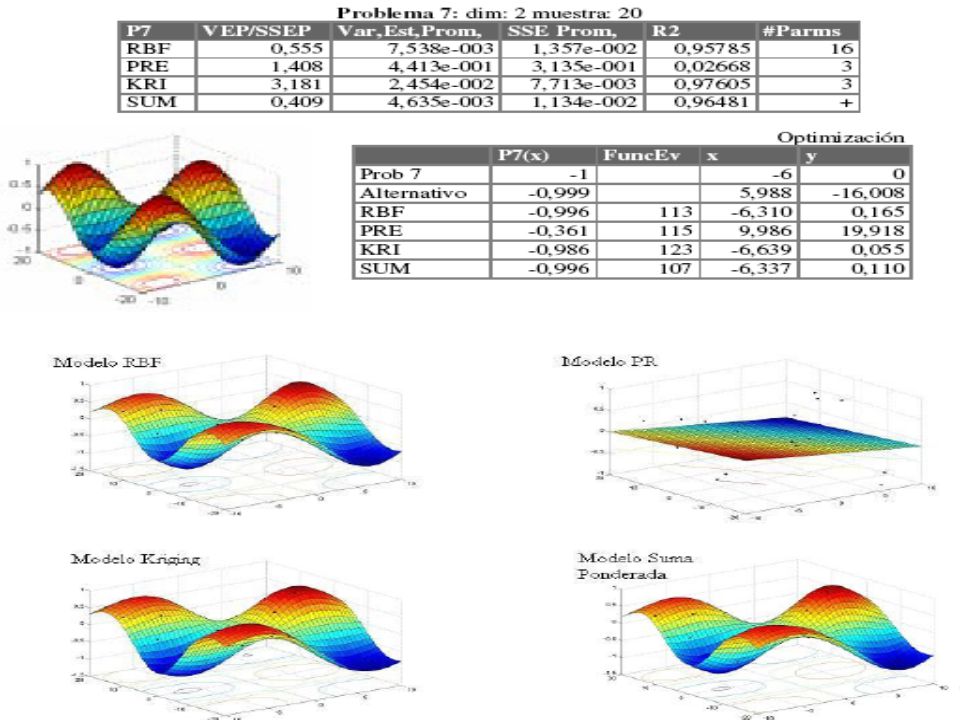
Caso de Estudio 4 (P7) Dimens:2 No–Lin:Alta Dimens:2 No–Lin:Alta
 Dimens:2 No–Lin:Alta Dimens:2 No–Lin:Alta")
11
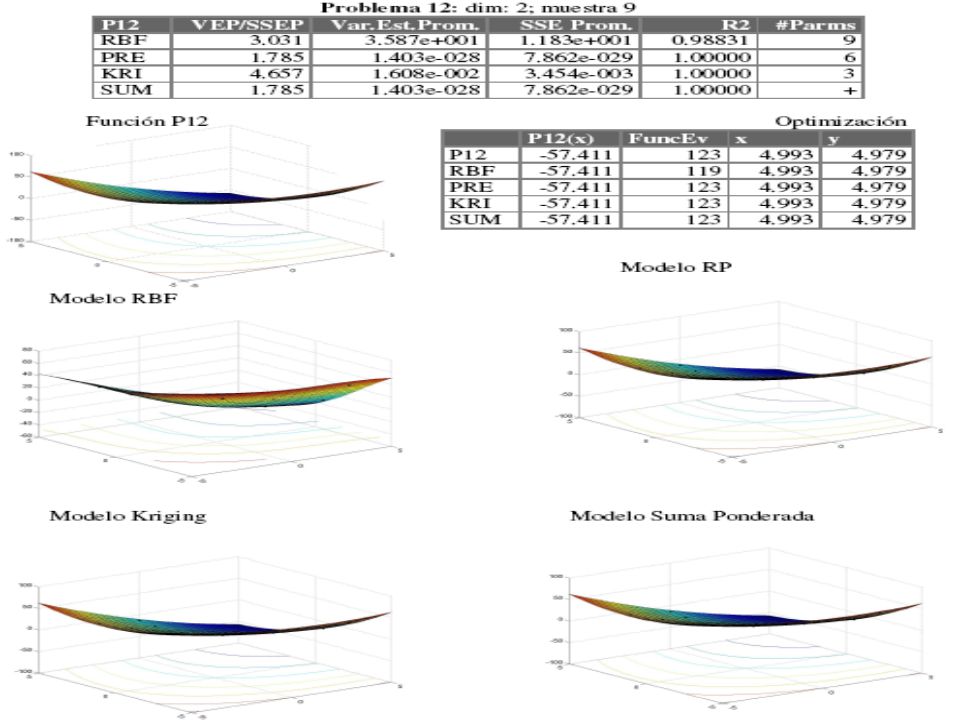
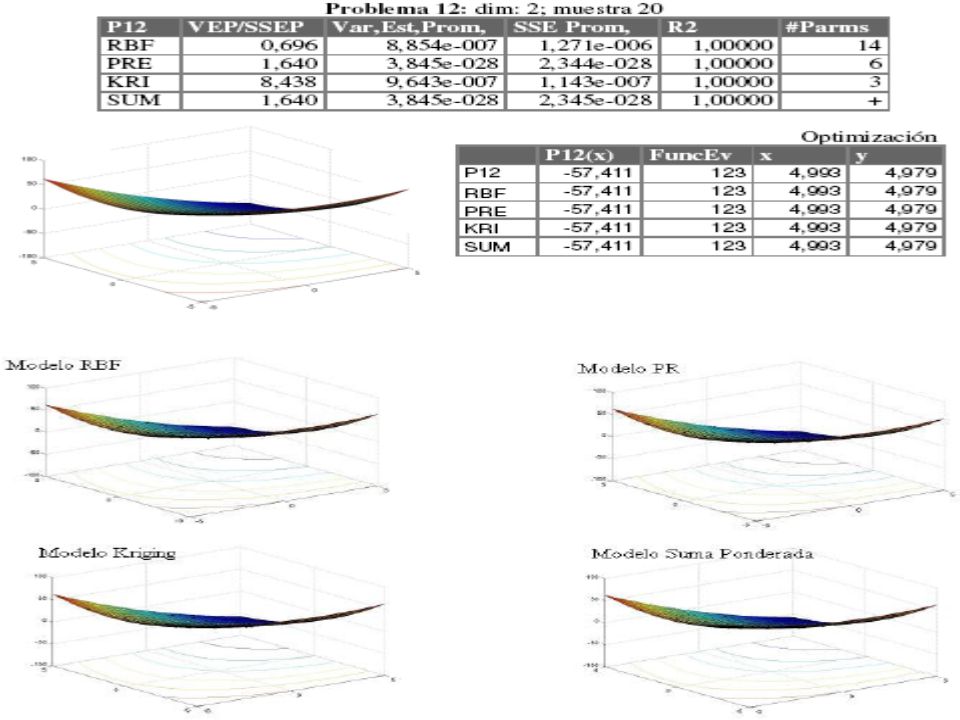
Caso de Estudio 5 (P12) Dimens:2 No–Lin:Baja Dimens:2 No–Lin:Baja
 Dimens:2 No–Lin:Baja Dimens:2 No–Lin:Baja")
12
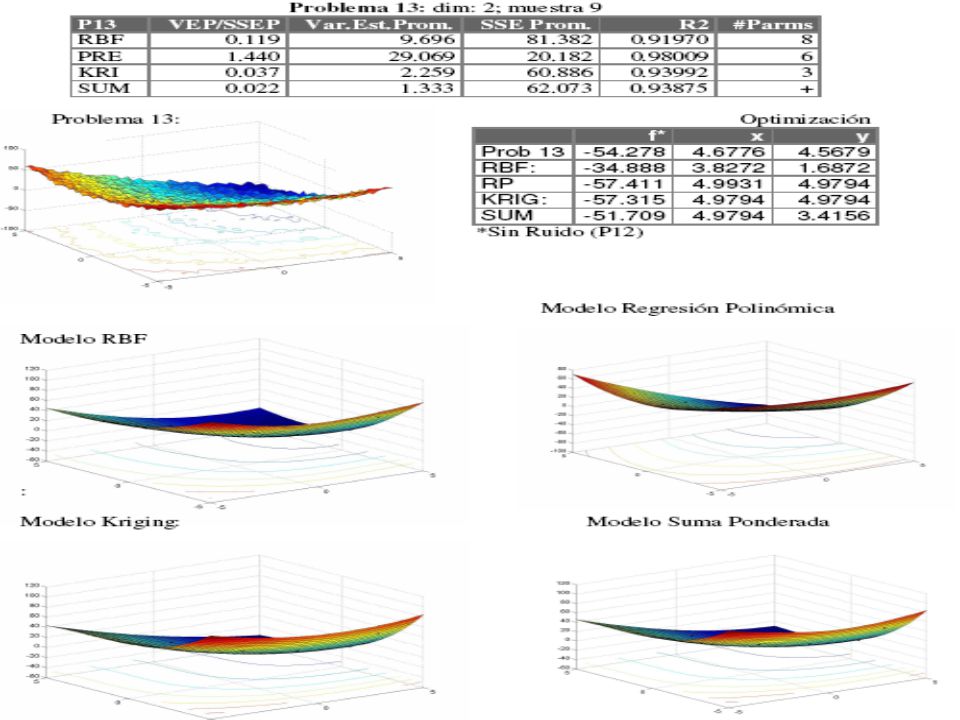
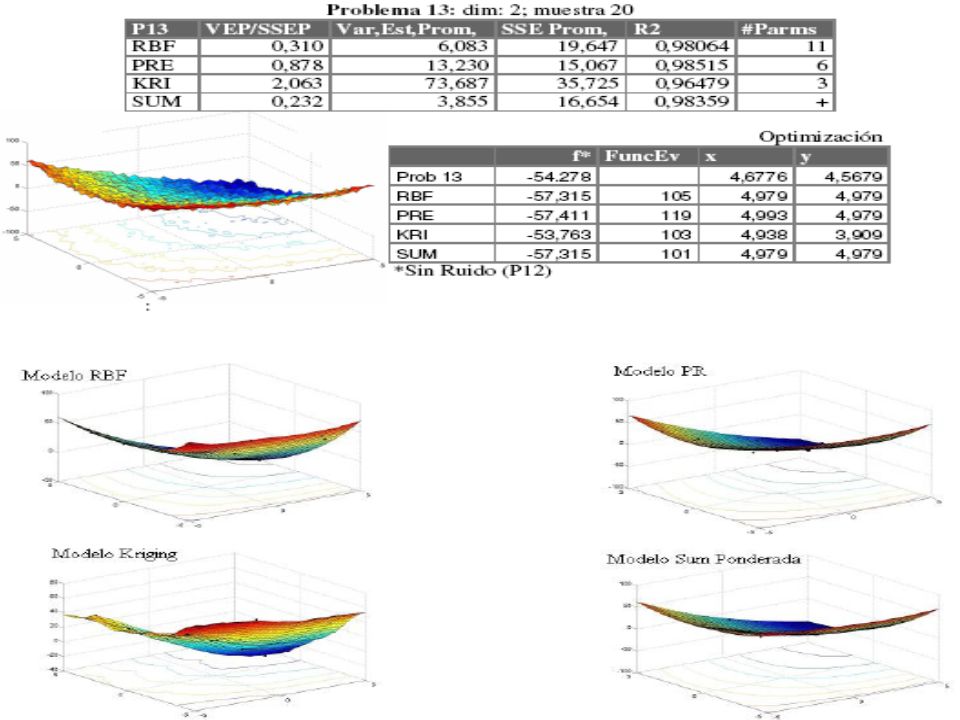
Caso de Estudio 6 (P13) Dimens:2 No–Lin:Baja Con Ruido Dimens:2 No–Lin:Baja Con Ruido
 Dimens:2 No–Lin:Baja Con Ruido Dimens:2 No–Lin:Baja Con Ruido")
13
1. Diseño del Experimento y Muestreo ==> Conjunto de datos iniciales. 2. Ajuste RBF; PRE y KRI ==> 3 Modelos. 3. Obtener medida de incertidumbre para c/u ==> Medidas de Incertidumbre. 4. Realizar “Model Averaging” ==> 4to Modelo (suma ponderada). 5. Optimizar c/u de los 4 modelos ==> 4 soluciones (Direct). 6. Comparar y analizar. 1. Diseño del Experimento y Muestreo ==> Conjunto de datos iniciales. 2. Ajuste RBF; PRE y KRI ==> 3 Modelos. 3. Obtener medida de incertidumbre para c/u ==> Medidas de Incertidumbre. 4. Realizar “Model Averaging” ==> 4to Modelo (suma ponderada). 5. Optimizar c/u de los 4 modelos ==> 4 soluciones (Direct). 6. Comparar y analizar. MetodologíaMetodología
. 5. Optimizar c/u de los 4 modelos ==> 4 soluciones (Direct). 6. Comparar y analizar. 1. Diseño del Experimento y Muestreo ==> Conjunto de datos iniciales. 2. Ajuste RBF; PRE y KRI ==> 3 Modelos. 3. Obtener medida de incertidumbre para c/u ==> Medidas de Incertidumbre. 4. Realizar Model Averaging ==> 4to Modelo (suma ponderada). 5. Optimizar c/u de los 4 modelos ==> 4 soluciones (Direct). 6. Comparar y analizar. MetodologíaMetodología.")
14
En el primer paso se obtiene el conjunto de puntos iniciales o muestra (para cada problema y tamaño de muestra) mediante el método del hipercubo latino. Diseño del Experimento y Muestreo

15
Modelos Sustitutos Los modelos construidos a partir de la muestra fueron: Kriging (KRI). Regresión Polinómica (PRE). Funciones de Base Radial (RBF). Cada uno de ellos es un caso especial de: Los modelos construidos a partir de la muestra fueron: Kriging (KRI). Regresión Polinómica (PRE). Funciones de Base Radial (RBF). Cada uno de ellos es un caso especial de:
. Funciones de Base Radial (RBF). Cada uno de ellos es un caso especial de: Los modelos construidos a partir de la muestra fueron: Kriging (KRI). Regresión Polinómica (PRE). Funciones de Base Radial (RBF). Cada uno de ellos es un caso especial de:.")
16
Kriging En nuestra versión de Kriging p = 1 y f(x) = 1. Lo cual hace β = μ. Y el modelo queda: μ + ε(x) con donde ; Y es el valor de la función en cada punto de la muestra. R es la matriz de correlación entre los puntos de la muestra y r(x) es el vector de correlación entre cada punto de la muestra y x.
 con donde ; Y es el valor de la función en cada punto de la muestra. R es la matriz de correlación entre los puntos de la muestra y r(x) es el vector de correlación entre cada punto de la muestra y x..")
17
Kriging R y r(x) se estiman mediante modelos de la forma: Donde cada C j es una función parametrizada decreciente de la distancia entre los puntos. Los C j usados fueron: exponencial generalizada, gaussiana, spline y esférica.

18
Regresión Polinómica Este es una caso especial de la regresión lineal. ε(x) se asume que es cero. Cada f i (x) es una de las siguientes: La constante 1. La función identidad de una de las variables. El producto de dos variables. El cuadrado de alguna variable. Este es una caso especial de la regresión lineal. ε(x) se asume que es cero. Cada f i (x) es una de las siguientes: La constante 1. La función identidad de una de las variables. El producto de dos variables. El cuadrado de alguna variable.
 se asume que es cero. Cada f i (x) es una de las siguientes: La constante 1. La función identidad de una de las variables. El producto de dos variables. El cuadrado de alguna variable. Este es una caso especial de la regresión lineal. ε(x) se asume que es cero. Cada f i (x) es una de las siguientes: La constante 1. La función identidad de una de las variables. El producto de dos variables. El cuadrado de alguna variable..")
19
Funciones de Base Radial En este caso también se asume ε(x) como cero. Las f i (x) son funciones gausianas o multicuádricas con centro en algún punto de la muestra. Además una f i (x) puede ser constante. Potencialmente a todo punto de la muestre le puede corresponder una función; pero se seleccionan con el método de forward selection. El radio de cada función se escoge entre distintas opciones según una medida de error. En este caso también se asume ε(x) como cero. Las f i (x) son funciones gausianas o multicuádricas con centro en algún punto de la muestra. Además una f i (x) puede ser constante. Potencialmente a todo punto de la muestre le puede corresponder una función; pero se seleccionan con el método de forward selection. El radio de cada función se escoge entre distintas opciones según una medida de error.
 son funciones gausianas o multicuádricas con centro en algún punto de la muestra. Además una f i (x) puede ser constante. Potencialmente a todo punto de la muestre le puede corresponder una función; pero se seleccionan con el método de forward selection. El radio de cada función se escoge entre distintas opciones según una medida de error. En este caso también se asume ε(x) como cero. Las f i (x) son funciones gausianas o multicuádricas con centro en algún punto de la muestra. Además una f i (x) puede ser constante. Potencialmente a todo punto de la muestre le puede corresponder una función; pero se seleccionan con el método de forward selection. El radio de cada función se escoge entre distintas opciones según una medida de error..")
20
Medidas de Incertidumbre Kriging: PRE y RBF: RBF:

21
Modelo Suma Ponderada

34
Resumen de Resultados R–Cuadrado

35
Resumen de Resultados Razón VEP / SSEP

36
Resumen de Resultados Optimización

37
Conclusiones La primera conclusión es que sí es eficaz usar más de un modelo para aproximar una función a partir de una muestra. Esta conclusión está basada en cuatro razones:

38
Conclusiones 1–. No hubo ningún modelo que fuera siembre, o la mayoría de las veces, el mejor. De hecho cada modelo fue el mejor en por lo menos dos casos.

39
Conclusiones 2–. El modelo Suma Ponderada obtuvo el mejor R 2 promedio con la muestra “Pequeña”, y el segundo mejor promedio con la muestra “Escasa”, siendo la diferencia con el mejor promedio, en este último caso, muy pequeña.

40
Conclusiones 3–. Cuando el modelo Suma Ponderada no tiene el mejor R 2 tiene el segundo mejor, con una excepción (P13, “Escasa”).
..")
41
Conclusiones 4–. También se observó que el modelo Suma Ponderada, tiene la varianza de R 2 más baja o segunda más baja. Esto indica que la calidad de sus resultados es consistente.

42
Conclusiones Sin embargo la pregunta más importante que esta investigación trata de contestar es si vale la pena calcular más de un modelo desde el punto de vista de la optimización.

43
Conclusiones Aunque en algunos problemas la diferencia entre los óptimos encontrados con los distintos modelos no es muy grande, sí es frecuente que haya uno mucho peor que los demás; y, aunque suele ser el modelo de “Regresión Polinómica” quien presenta ese problema, no es poco frecuente que sea algún otro el peor.

44
Conclusiones De modo que sigue siendo válido el primero de los argumentos esgrimidos con respecto al modelado, como no hay un modelo que obtenga el mejor óptimo en todos los casos, y ni siquiera uno que sea siempre uno de los dos mejores (aparte del modelo Suma Ponderada), es necesario construir más de un modelo para obtener un óptimo confiable.
, es necesario construir más de un modelo para obtener un óptimo confiable.")
45
Conclusiones Otras observaciones y conclusiones son: El estimador estándar de la varianza del error de RBF, usando el método de Forward Selection, está significativamente sesgado hacia abajo. El estimador de la de Kriging en teoría es sesgado hacia abajo; pero esto no se notó.

46
Conclusiones Otras observaciones y conclusiones son: Los modelos RBF tuvieron, en promedio, más parámetros que la mitad del tamaño de la muestra (> 57%). Los coeficientes del modelo Suma Ponderada asumen que no hay correlación entre las predicciones de los modelos. Esto no es cierto.

47
Conclusiones Otras observaciones y conclusiones son: La estimación de la varianza del modelo Suma Ponderada estubo significativamente sesgada hacia abajo.

48
Recomendaciones Mejorar el modelo Suma Ponderada con información acerca de la correlación de las predicciones de los modelos. Implementar EGO sustituyendo Suma Ponderada por Kriging (o RBF); pero hay que tener en cuenta el sesgo en la estimación de la varianza de Suma Ponderada.
; pero hay que tener en cuenta el sesgo en la estimación de la varianza de Suma Ponderada..")
49
Recomendaciones Encontrar un buen estimador de la varianza de RBF que no sea tan ad– hoc. Los modelos RBF y PRE podrían integrarse como la parte determinística de un modelo de Kriging. (En vez de usar Suma Ponderada).
..")
Presentaciones similares