Descargar la presentación
La descarga está en progreso. Por favor, espere

0
6- Métodos de punto interior en programación lineal (MPI)
")
1
DEFINICIONES Sea (P) el siguiente problema de programación lineal: (P) Min cTx / Ax = b x 0, donde c Rn, b Rm y A es una matriz de rango completo mxn con n>m. Sea la región factible S = { x Rn, / Ax = b, x 0 } y su interior relativo: S0 = { x Rn, / Ax = b, x >0 } MPI: obtiene soluciones factibles intermedias en S0

2
En forma genérica, sea: Min f0(x) / (1) fi(x) 0 i=1..m A.x = b Con fi convexa, dos veces contínuamente diferenciable, Am,n, de rango m Asumimos que el problema anterior es estrictamente factible, o sea, existe un punto interior al dominio z / fi(z) < 0 i=1..m , Az=b El problema (1) lo podemos reformular como:
 < 0 i=1..m , Az=b. El problema (1) lo podemos reformular como:")
3
I-(u) es la una función indicatriz de R-:
Donde: I-(u) es la una función indicatriz de R-: Aproximación de I-(u) con barrera logarítmica: (2) -1
 es la una función indicatriz de R-: Aproximación de I-(u) con barrera logarítmica: (2) -1.")
4
Así, (2) es un problema con restricciones de igualdad lineales.
Para t>0, -1/t. log (-u) es una aproximación diferenciable de I- y la aproximación mejora cuando t Propiedades de la barrera logarítmica: convexa, dos veces contínuamente diferenciable -1
 es una aproximación diferenciable de I- y la aproximación mejora cuando t Propiedades de la barrera logarítmica: convexa, dos veces contínuamente diferenciable. -1.")
5
Caso particular: prog. Lineal
la función barrera logarítmica es: xRn, x>0 p(x)= - log xi = - log xi I=1..n i=1..n La barrera penaliza las variables próximas a cero, o sea, la frontera de S. (III) DEF: x*=argmin p(x) xS0= es el centro analítico de S (maximiza e producto de las variables) Idea principal: en cada paso el costo de (P) disminuye y soluciones intermedias en S0 (no en S). A efectos de cumplir con ambos objetivos, se construyen nuevas funciones objetivos penalizadas donde aparece la función barrera, por ejemplo: R, xR+n f(x)=cTx+p(x)
= - log xi = - log xi. I=1..n i=1..n. La barrera penaliza las variables próximas a cero, o sea, la frontera de S. (III) DEF: x*=argmin p(x) xS0= es el centro analítico de S (maximiza e producto de las variables) Idea principal: en cada paso el costo de (P) disminuye y soluciones intermedias en S0 (no en S). A efectos de cumplir con ambos objetivos, se construyen nuevas funciones objetivos penalizadas donde aparece la función barrera, por ejemplo: R, xR+n f(x)=cTx+p(x)")
6
METODOS DE CAMINO CENTRAL (MCC):
DEF: para cada valor de queda definida una función de la familia f(x), el punto donde se produce el mínimo de esta función se llama punto central y a la curva x() se le llama camino central para el problema (P) x() = argmin f(x) xS0 PROPS: x() es diferenciable y x() valor óptimo de (P) cuando crece Existen diferentes implementaciones del método de camino central variando la forma en que se parametriza la curva. Idea principal: en cada paso el costo de (P) disminuye y soluciones intermedias en S0 (no en S).
, el punto donde se produce el mínimo de esta función se llama punto central y a la curva x() se le llama camino central para el problema (P) x() = argmin f(x) xS0. PROPS: x() es diferenciable y x() valor óptimo de (P) cuando crece. Existen diferentes implementaciones del método de camino central variando la forma en que se parametriza la curva. Idea principal: en cada paso el costo de (P) disminuye y soluciones intermedias en S0 (no en S).")
7
A efectos de cumplir con ambos objetivos: mejora de costos y aproximación al centro analítico, se construyen nuevas funciones objetivos penalizadas (funciones auxiliares) donde aparece la barrera: (a) Frish, Fiacco y McCormick. El parámetro está asociado al gap de dualidad: R, xR+n f(x)=cTx+p(x) (b) Huard, Renegar. El parámetro K es una cota superior del costo óptimo y q n es una constante: xS0 y cTx < K, fK(x)=-qlog(K-cTx)+p(x) (c) Karmarkar. El parámetro v es una cota inferior del costo óptimo y q n es una constante: xS0 , fv(x)= qlog(cTx-v)+p(x) (función potencial)
 Frish, Fiacco y McCormick. El parámetro está asociado al gap de dualidad: R, xR+n f(x)=cTx+p(x) (b) Huard, Renegar. El parámetro K es una cota superior del costo óptimo y q n es una constante: xS0 y cTx < K, fK(x)=-qlog(K-cTx)+p(x) (c) Karmarkar. El parámetro v es una cota inferior del costo óptimo y q n es una constante: xS0 , fv(x)= qlog(cTx-v)+p(x) (función potencial)")
8
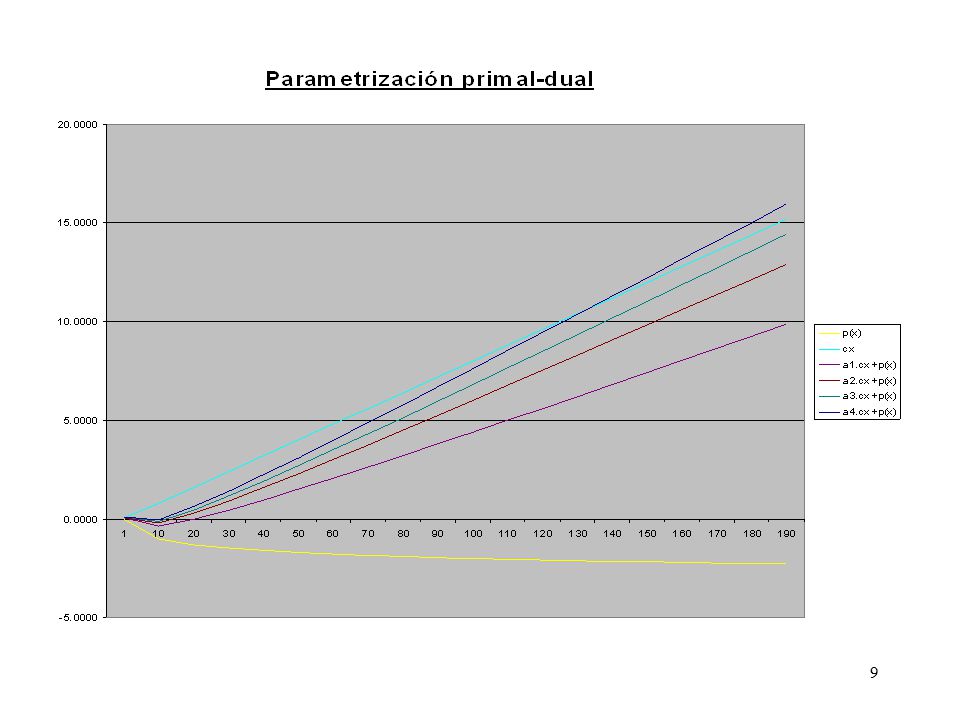
Parametrizaciones en MCC: cada una de las anteriores funciones auxiliares genera una parametrización diferente x() del camino central: (a) Primal-dual: R, xR+n , f(x)=cTx+p(x) (convexa) El nombre de esta parametrización se debe a la estrecha relación entre el parámetro y el gap de dualidad : =n/ (b) Primal: xS0 y cTx < K, fK(x)=-qlog(K-cTx)+p(x) (convexa) Es llamada primal debido a que el parámetro K es una cota superior de la función objetivo primal. (c) Dual: xS0 , fv(x)= qlog(cTx-v)+p(x) (no convexa) Es llamada dual debido a que el parámetro v es una cota inferior del valor óptimo del objetivo, estando asociado al valor de la función objetivo dual, para alguna una solución dual factible
 Primal-dual: R, xR+n , f(x)=cTx+p(x) (convexa) El nombre de esta parametrización se debe a la estrecha relación entre el parámetro y el gap de dualidad : =n/ (b) Primal: xS0 y cTx < K, fK(x)=-qlog(K-cTx)+p(x) (convexa) Es llamada primal debido a que el parámetro K es una cota superior de la función objetivo primal. (c) Dual: xS0 , fv(x)= qlog(cTx-v)+p(x) (no convexa) Es llamada dual debido a que el parámetro v es una cota inferior del valor óptimo del objetivo, estando asociado al valor de la función objetivo dual, para alguna una solución dual factible.")
12
ALGORITMO MCC GENERAL:
k=0 Repeat 1- Calcular k+1=f( k) , según sea la parametrización utilizada 2- Calcular xk+1= x(k+1) con algún algoritmo de optimización 3- k = k +1 Until (k) < 2-L
 , según sea la parametrización utilizada. 2- Calcular xk+1= x(k+1) con algún algoritmo de optimización. 3- k = k +1. Until (k) < 2-L.")
13
Clasificación según la parametrización ()
Primal Primal-dual Dual f(x) fK(x)=-qlog(K-cTx)+p(x) f(x)=cTx+p(x) fv(x)=qlog(cTx-v)+p(x) f(x) q. c -x-1 c -x-1 q. c -x-1 K-cTx cTx-v () (n/q)(K- cTx) n/ (n/q)(cTx-v) Act. K’=K+(1- ) cTx ’= / v’= v+(1-) cTx (0,1) (n/q,1)
 fK(x)=-qlog(K-cTx)+p(x) f(x)=cTx+p(x) fv(x)=qlog(cTx-v)+p(x) f(x) q. c -x-1 c -x-1 q. c -x-1. K-cTx cTx-v. () (n/q)(K- cTx) n/ (n/q)(cTx-v) Act. K’=K+(1- ) cTx ’= / v’= v+(1-) cTx. (0,1) (n/q,1)")
14
Actualización del parámetro
A continuación se especifica la forma de actualizar el parámetro en el paso 1 del algoritmo general de MCC: (a) Parametrización primal-dual: k+1= k / donde (0,1) es un número arbitrario La elección de influye sobre la complejidad del algoritmo y depende si se elige un modelo de “paso” corto o largo. (b) Parametrización primal KK+1=Kk+(1- ) cTxK KK es una sucesión decreciente, cTxK+1 < cTxK y (K)=K- cTxk es decreciente (c) Parametrización dual vk+1= vk+(1-) cTxk, con q>n para que exista convergencia y (n/q,1)
 Parametrización primal-dual: k+1= k / donde (0,1) es un número arbitrario. La elección de influye sobre la complejidad del algoritmo y depende. si se elige un modelo de paso corto o largo. (b) Parametrización primal. KK+1=Kk+(1- ) cTxK. KK es una sucesión decreciente, cTxK+1 < cTxK y (K)=K- cTxk es. decreciente. (c) Parametrización dual. vk+1= vk+(1-) cTxk, con q>n para que exista convergencia y (n/q,1)")
15
Cálculo de xK+1 (ver I,II)
En el paso 2 del algoritmo general de MCC se hacía referencia al cálculo de xK+1 mediante un algoritmo de optimización. El algoritmo usado más frecuentemente es el “scaling steepest descendent” (SDD). Escalado de variables: sea el cambio de variables x=Dy donde D es diagonal positiva. Dado x0S0 se escala respecto a x0 mediante la transformación x=X0y / X0 =(x01,.. X0n) NOTA: el punto x0 se transforma en el e (vector de n unos). Descomposición de un vector en espacios ortogonales: sean Am,n y d Rn, d puede ser descompuesto de una única forma en d=dx+dy donde: dx N(A)={x Rn/ Ax=0} y dy R(A)={x Rn/ x=Atw, w Rm} La operación proyección es una transformación lineal representada por PA
. Escalado de variables: sea el cambio de variables x=Dy donde D es diagonal positiva. Dado x0S0 se escala respecto a x0 mediante la transformación x=X0y / X0 =(x01,.. X0n) NOTA: el punto x0 se transforma en el e (vector de n unos). Descomposición de un vector en espacios ortogonales: sean Am,n y d Rn, d puede ser descompuesto de una única forma en d=dx+dy donde: dx N(A)={x Rn/ Ax=0} y. dy R(A)={x Rn/ x=Atw, w Rm} La operación proyección es una transformación lineal representada por PA.")
16
ALGORITMO SDD GENERAL:
Sean x0S0 y f: S0 R contínuamente diferencible k=0 Repeat 1- Escalado: A’=AXK, g’=XK f(xK) 2- Dirección de búsqueda: h’=-PA’.g’ 3- Búsqueda lineal: y=e+h’ / y’>0 4- Escalado: xK+1=XK.y’ 5- k = k +1 Until ||h’(x, )|| <
 2- Dirección de búsqueda: h’=-PA’.g’ 3- Búsqueda lineal: y=e+h’ / y’>0. 4- Escalado: xK+1=XK.y’ 5- k = k +1. Until ||h’(x, )|| < ")
17
Sean (P) Min cTx / y su dual (D) Max bTw /
Ax = b Atw + z = c x 0, z 0, Lema: z Rn es una holgura dual factible de (D) z 0 y PAz=PAc Demos: sea z 0 , z es holgura dual factible para (D) para algún wRm, c - z = Atw. Por otro lado, c – z puede descomponerse de forma única en: c-z = PA(c-z)+ Atw PAz=PAc. NOTA: Aplicando el lema anterior, dada x1 S, (D) es equivalente a: Min x1Tz / PAz = PAc, z 0,
 z 0 y PAz=PAc. Demos: sea z 0 , z es holgura dual factible para (D) para algún wRm, c - z = Atw. Por otro lado, c – z puede descomponerse de forma única en: c-z = PA(c-z)+ Atw PAz=PAc. NOTA: Aplicando el lema anterior, dada x1 S, (D) es equivalente a: Min x1Tz / PAz = PAc, z 0,")
18
Cálculo del gap para la parametrización primal-dual:
Sean x() los puntos del camino central, entonces PAf (x)=0, o sea: PAc-PAx-1=0 PAc=PAx-1 cp =PAc =PAx-1/ , Como x-1/ 0 y PAx-1/ = cp =PAc, aplicando el lema anterior, x-1/ es una holgura dual factible el gap de dualidad será: = x(). x-1 ()/ = n/
 los puntos del camino central, entonces PAf (x)=0, o sea: PAc-PAx-1=0 PAc=PAx-1 cp =PAc =PAx-1/ , Como x-1/ 0 y PAx-1/ = cp =PAc, aplicando el lema anterior, x-1/ es una holgura dual factible el gap de dualidad será: = x(). x-1 ()/ = n/ ")
19
ALGORITMO DE KARMARKAR:
Sea el problema (P), presentado de la siguiente forma: (P) Min cTx / A’x = 0 aTx = 1, x 0, Este formato se puede obtener directamente introduciendo variables en el (P) original. Sea q=n en la función potencial, e inicialmente v=0, entonces: f0(x)=nlog(cTx)+p(x) , esta función es homogénea de grado 0: f0(bx)= f0(x) para cualquier b>0, x>0. Sea x>0 / A’x=0 pero aTx>0 1 x/ aTx es factible y tiene el mismo valor potencial De acuerdo a lo anterior se puede seguir el siguiente esquema: 1- Eliminar la restricción aTx =1 2- Usar SSD para encontrar f0 3- Calcular x’= xK/ aTxK Si v 0, las conclusiones anteriores son válidas, considerando: v’=v. aTx (sigue siendo factible) y f0(x)=nlog(c-v’a)Tx.p(x)
, presentado de la siguiente forma: (P) Min cTx / A’x = 0. aTx = 1, x 0, Este formato se puede obtener directamente introduciendo variables en el (P) original. Sea q=n en la función potencial, e inicialmente v=0, entonces: f0(x)=nlog(cTx)+p(x) , esta función es homogénea de grado 0: f0(bx)= f0(x) para cualquier b>0, x>0. Sea x>0 / A’x=0 pero aTx>0 1 x/ aTx es factible y tiene el mismo valor potencial. De acuerdo a lo anterior se puede seguir el siguiente esquema: 1- Eliminar la restricción aTx =1. 2- Usar SSD para encontrar f0. 3- Calcular x’= xK/ aTxK. Si v 0, las conclusiones anteriores son válidas, considerando: v’=v. aTx (sigue siendo factible) y f0(x)=nlog(c-v’a)Tx.p(x)")
20
fv(x)=nlog(cTx-v)+p(x) ,
v= valor óptimo conocido (si se desconoce, calcular vkv) v0v, cota inferior de v x0S0 k=0 Repeat 1- Escalado: A’=AXK, c’=XKc, a’=XK a 2- Cota inferior: vK+1=max {vK,v(xK)} 3- Dirección de búsqueda: h’=--PA’. ( n (c’-vK+1a’) -e) (cTx- vK+1) 4- Búsqueda lineal: y=e+h’ / y’>0 5- Volver al conjunto factible: y*=y’/(a’Ty’) 6- Escalado: xK+1=XK.y* 7- k = k +1 Until convergencia ((xK,K) < 2-L
 v0v, cota inferior de v. x0S0. k=0. Repeat. 1- Escalado: A’=AXK, c’=XKc, a’=XK a. 2- Cota inferior: vK+1=max {vK,v(xK)} 3- Dirección de búsqueda: h’=--PA’. ( n (c’-vK+1a’) -e) (cTx- vK+1) 4- Búsqueda lineal: y=e+h’ / y’>0. 5- Volver al conjunto factible: y*=y’/(a’Ty’) 6- Escalado: xK+1=XK.y* 7- k = k +1. Until convergencia ((xK,K) < 2-L.")
Presentaciones similares

 Rafael Salas>")
 Rafael Salas>")

















