Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Nociones Elementales de Matrices
Antes de ver la solución de los Sistemas de Ecuaciones Lineales haremos un repaso de las fundamentos de las matrices.

2
Nociones Elementales de Matrices

3
Nociones Elementales de Matrices

4
Nociones Elementales de Matrices

5
Nociones Elementales de Matrices

6
Nociones Elementales de Matrices

7
Nociones Elementales de Matrices

8
Solución de sistemas de ecuaciones lineales
Análisis de Circuitos (ecuaciones de malla y nodos) Solución Numérica de ecuaciones diferenciales (Método de las diferencias Finitas) Solución Numérica de ecuaciones de integrales (Metodo de los Elementos Finitos, Método de los Momentos)
 Solución Numérica de ecuaciones diferenciales (Método de las diferencias Finitas) Solución Numérica de ecuaciones de integrales (Metodo de los Elementos Finitos, Método de los Momentos) ")
9
Consistencia (Solubilidad)
El sistema lineal de ecuaciones Ax=b tiene una solución, o es consistente si y solo si Rango{A}=Rango{A|b} Un sistema es inconsistente cuando Rango{A}<Rango{A|b} Rank{A} es el máximo numero de columnas linealmente independientes o filas de A. El rango puede ser encontrado usando ERO (Elementary Row Oparations) ó ECO (Elementary column operations).
 ó ECO (Elementary column operations).")
10
Operaciones Elementales de filas (ERO)
Las siguientes operaciones aplicadas a la matriz aumentada[A|b], producen un sistema lineal equivalente Intercambios: El orden de dos filas pueden ser cambiada Escalado: Multiplicando un fila por una constante no cero Reemplazo: Las filas pueden ser reemplazadas por la suma de esa fila y un múltiplo distinto a cero de cualquier otra fila

11
Un ejemplo inconsistente
ERO:Multiplicar la primera fila por -2 y sumar la segunda fila Rank{A}=1 Entonces este sistema de ecuaciones no es soluble Rank{A|b}=2

12
Unicidad de las soluciones
El sistema tiene una única solucion si y solo si Rango{A}=Rango{A|b}=n n es el orden del sistema Tales sistemas son llamados sistemas full-rank (rango completo)
")
13
Sistemas rango completo (Full-rank)
Si Rango{A}=n Det{A} 0 A es no singular por lo tanto invertible Solución Única

14
Matrices de rango deficiente
Si Rango{A}=m<n Det{A} = 0 A is singular por lo tanto no es invertible número infinito de soluciones (n-m variables libres) sistema sub-determinado Rank{A}=Rank{A|b}=1 Consistente soluble
 sistema sub-determinado. Rank{A}=Rank{A|b}=1. Consistente soluble.")
15
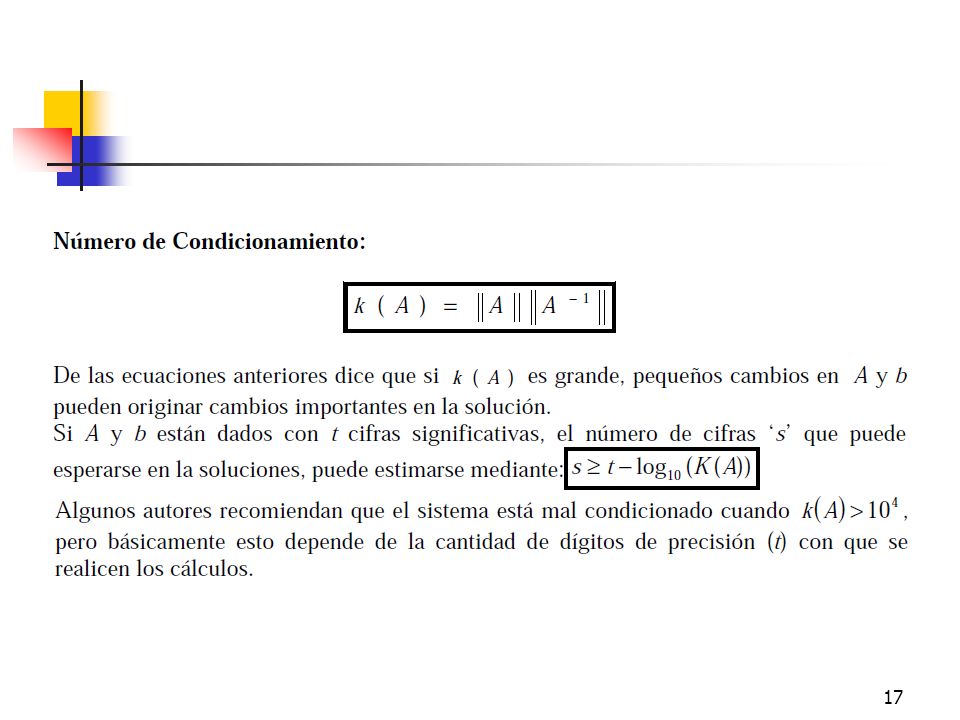
Sistema de ecuaciones mal-condicionadas
Una pequeña desviación en las entradas de la matriz A, causa una gran desviación en la solución.

16
Mal condicionada (continua.....)
Un sistema lineal de ecuaciones se dice a ser “mal condicionada” si la matriz de coeficientes tiende a ser singular

18
Tipos de ecuaciones de sistemas lineales a ser estudiados
Los coeficientes reales de la matriz cuadrada A EL vector b es diferente de cero y real Sistema consistente, soluble Sistemas rango completo, solución única Sistemas bien-condicionados

19
Técnicas de Solución Métodos directos de solución
Encuentra una solución en un número finito de operaciones transformando el sistema en un sistema equivalente que sea ' más fácil ' de solucionar. Triangulares diagonales, . Métodos de solución Iterativos Calcula las aproximaciones sucesivas del vector solución para una mat. A y un b dados, comenzando de un punto inicial x0 Total del · de operaciones es incierto, puede que no converja.

20
Métodos de solución directa
Eliminación Gaussiana Usando ERO, la matriz A es transformada en una matriz triangular superior (todos los elementos debajo de la diagonal son cero). Sustitución hacia atrás es usada para resolver un sistema triangular superior Back substitution ERO
. Sustitución hacia atrás es usada para resolver un sistema triangular superior. Back substitution. ERO.")
21
Primer paso de la eliminación
Elemento pivotal

22
Segundo paso de la eliminación
Elemento Pivotal

23
Algoritmo de la Eliminación Gaussiana
For c=p+1 to n

24
Algoritmo de la sustitución hacia atrás

25
Contador de Operaciones
Número de operaciones aritméticas requeridas por el algoritmo para completar esta tarea. Generalmente solo multiplicaciones y divisiones son contadas. Proceso de Eliminación Sustitución hacia atrás Total Dominates No eficiente para diferentes vectores RHS

26
Decomposición LU A=LU Ax=b LUx=b Define Ux=y
Ly=b Resolver y por sustitución hacia adelante Ux=y Resolver x por sustitución hacia atrás Las operaciones elementales entre filas debe ser desarrolladas en b así como en A. La información de estas operaciones es almacenada en L En verdad y es obtenida aplicando operaciones elementales al vector b.

27
Decomposición LU por Eliminación Gausiana
Existen infinitas formas diferentes para descomponer A. Una de las más populares es: U=Matriz de la Eliminación Gaussiana L=Multiplicadores usados para la eliminación Almacenamiento Compacto: Las entradas diagonales de la matriz L son todos unos, estos no necesitan almacenarse. LU es almacenado en una matriz.

28
Contador de Operaciones
A=LU Descomposición Ly=b Sustitución hacia adelante Ux=y Sustitución hacia atrás Total Para diferentes vectores RHS, el sistema puede ser eficientemente resuelto.

29
Pivoteo Computadoras usan precisión aritmética finita
Pequeños errores son introducidos en cada operación aritmética, propagación de errores Cuando los elementos pivotales son muy pequeños, los multiplicadores podrían ser muy grandes. La adición de números de magnitud diferente puede conducir a la pérdida de significación . Para reducir el error, se realiza intercambio de filas para maximizar la magnitud del elemento pivotal.

30
Ejemplo: Sin Pivoteo aritmética 4-digit Pérdida de precisión

31
Ejemplo: Con Pivoteo

32
Procedimiento de Pivoteo
Parte Eliminada Fila Pivotal Columna Pivotal

33
Pivoteo por fila Más comúnmente llamado procedimiento de pivoteo parcial Busque la columna pivotal Encuentre el mas grande elemento en magnitud Luego intercambie esta fila con la fila pivotal.

34
Pivoteo por filas Intercambio de filas El más grande en magnitud

35
Pivoteo por columna El mas grande en magnitud Intercambio de
Estas columnas

36
Pivoteo Completo estas filas Más grande en magnitud Intercambie
estas columnas estas filas Más grande en magnitud

37
Pivoteo por filas en Descomposición LU
Cuando dos filas de A se intercambian, las filas de b deben también ser intercambiadas. Use un vector pivote. Vector pivote inicial son enteros desde 1 hasta n. Cuando dos filas (i y j) de A son intercambiadas, aplicar esto al vector pivote.
 de A son intercambiadas, aplicar esto al vector pivote.")
38
Modificando el vector b
Cuando se realiza la descomposición LU de A, el vector pivote nos da el orden de las filas después del intercambio. Antes de aplicar la sustitución hacia adelante para resolver Ly=b, modificar el orden del vector b de acuerdo a las entradas del vector pivote.

39
Descomposición LU algoritmo con pivoteo parcial
Columna para una entrada máxima Intercambiode filas Actualizando la matriz L For c=k+1 to n Actualizando la matriz U

40
Ejemplo Intercambio de columnas: Máxima magnitud segunda fila
Intercanbio de la 1era y 2da fila

41
Ejemplo (continuación)...
Elimación de a21 y a31 usando a11 como elemento pivotal A=LU en forma compacta (en una sola matriz) Multiplicadores (matriz L) l21=0; l31=-0.25
 Multiplicadores (matriz L) l21=0; l31=")
42
Ejemplo (continuación)...
Columna encontrada: Maxima magnitud en la tercera fila Intercambio de la 2da y 3era fila

43
Ejemplo (continuación)...
Eliminar a32 usando a22 como elemento pivotal Multiplicadores (matriz L) l32=3/3.5
 l32=3/3.5.")
44
Ejemplo (continuación)...
A’x=b’ LUx=b’ Ux=y Ly=b’

45
Ejemplo (continuación)...
Ly=b’ Sustitución Inversa Ux=y Sustitución Directa

46
Eliminación de Gauss-Jordan
Los elementos sobre la diagonal se convierten y por debajo de la diagonal son ceros.

47
Eliminación de Gauss-Jordan
Casi 50% mas de operaciones aritméticas que la Eliminación Gaussiana. Gauss-Jordan (GJ) Eliminación es preferible cuando la inversa de una matriz es requirido. Aplicar eliminación GJ para convertir A en una matriz identidad.
 Eliminación es preferible cuando la inversa de una matriz es requirido. Aplicar eliminación GJ para convertir A en una matriz identidad.")
48
Diferentes formas de factorización LU
Forma de Doolittle Obtenida por Eliminación Gaussiana Forma de Crout Forma de Choleski

49
Forma de Crout Cálculo de la primera columna de L
Cálculo de la primera fila de U Cálculo alternado de las colum. de L y filas de U

50
Secuencia de la reducción de Crout
2 1 4 3 5 6 7 Una entrada de la matriz A es usada solamente una vez para calcular la Correspondiente entrada de las matrices L o U .Así las columnas de L y las filas de U pueden ser almacenadas en la matriz A

51
Factorización de Choleski
Si A es simétrica y definida positiva, entonces la factorización LU Puede ser arreglada para que U = LT , la cual se obtiene de la factorización de Choleski A = LLT Donde L es una matriz triangular inferior con diagonal con entradas positivas Algoritmo para el cálculo puede ser derivado por la ecuación correspondiente a las entradas de A y LLt En el caso de 2 × 2, por ejemplo, Implica que:

52
Factorización de Choleski (continua)
Una forma de escribir el algoritmo general,es

53
Solución de Sistemas Lineales de ecuaciones Complejas
Cz=w C=A+jB Z=x+jy w=u+jv (A+jB)(x+jy)=(u+jv) (Ax-By)+j(Bx+Ay)=u+jv Sistema lineal de ecuaciones reales
(x+jy)=(u+jv) (Ax-By)+j(Bx+Ay)=u+jv. Sistema lineal de ecuaciones reales.")
54
Sistemas grandes y Esparcidos
Cuando el sistema lineal es grande y esparcido (muchas entradas ceros), los métodos directos llegan a ser ineficientes por la presencia de términos de relleno. Los términos de relleno son aquellos que resultan ser diferentes de cero durante la eliminación Términos de relleno Eliminación
, los métodos directos llegan a ser ineficientes por la presencia de términos de relleno. Los términos de relleno son aquellos que resultan ser diferentes de cero durante la eliminación. Términos de relleno. Eliminación.")
55
Matrices Esparcidas La matriz de ecuación de nodos es una matriz esparcida. Matrices Esparcidas son almacenadas eficientemente almacenando solamente las entradas no cero. Cuando del sistema es muy grande (n=10,000) los términos de relleno aumentan los requerimientos de almacenamiento considerablemente. En tales casos los métodos de solución iterativa debe ser preferidos en lugar de métodos de solución directa.
 los términos de relleno aumentan los requerimientos de almacenamiento considerablemente. En tales casos los métodos de solución iterativa debe ser preferidos en lugar de métodos de solución directa.")
56
Problema 1 Resolver por Eliminación Gaussiana con pivoteo parcial de filas: E2-(3/4)E1 =>E2 E3-(1/2)E1 =>E3 E4-(-1/4)E1=>E4
E1=>E4.")
57
Problema 1 Intercambiamos las Ecuaciones 2 y 3 (E2E3)
E3-(-1/2)E2 =>E3 E4-( 1/4)E2 =>E4
E2 =>E3. E4-( 1/4)E2 =>E4.")
58
Problema 1 E4-(-1/4)E3 =>E4 Resolviendo por
sustitución hacia atrás:

59
Problema 2 Obtener la factorización de Doolite: Solución 1
A partir de la Eliminacion Gaussiana: m21= a21/a11 =2/6=1/3 E2-(1/3)E1=>E2
E1=>E2.")
60
Problema 2 Solución 2 Planteando el producto matricial:

61
Problema 3 Resolver por la factorización de Doolite: Solución
Del ejercicio anterior ya tenemos la factorización LU:

62
Problema 3 Se obtienen dos sistemas triangulares fáciles de resolver. Resolviendo el sistema triangular inferior por sustitución directa: Resolviendo el sistema triangular superior por sustitución directa:

63
Problema 4 Obtener la factorización de Crout: Solucion
Debemos plantear la multiplicacion matricial:

64
Problema 4

65
Problema 5 Método de Crout para sistemas tridiagonales

66
Problema 6 Factorizar por el método de Choleski la siguiente matriz:
Solución Se requiere que la matriz sea simétrica y definida positiva para aplicar Choleski.

67
Problema 6 Es evidente que la matriz es simétrica; para verificar que es definida positiva verificamos si se satisface el criterio de Silvester:

68
Problema 6 Dado que los determinantes de todos los menores principales son positivos podemos afirma que la matriz es definida positiva y podemos aplicar la factorización de Choleski con seguridad.

69
Problema 6 Resolviendo la multiplicación matricial:

Presentaciones similares










>")








