Descargar la presentación
La descarga está en progreso. Por favor, espere

1
EQUILIBRIO ESTATICO Y ELASTICIDAD

2
Al estudiar este capítulo, usted aprenderá: Las condiciones que deben satisfacerse para que un cuerpo o una estructura estén en equilibrio. Cuál es el significado del centro de gravedad de un cuerpo, y como se relaciona con su estabilidad. Como resolver problemas que implican cuerpos rígidos en equilibrio. Como analizar situaciones en las que un cuerpo se deforma por tensión, compresión, presión o corte. Qué sucede cuando un cuerpo se estira tanto que se deforma o se rompe.

3
Cualquier edificio, desde los rascacielos de muchos pisos hasta la cabaña más sencilla, debe diseñarse de modo que no se derrumbe. Lo mismo sucede con un puente colgante, una escalera recargada sobre una pared o una grúa que levanta una cubeta llena de concreto. Un cuerpo que puede modelarse como partícula está en equilibrio, siempre que la resultante de las fuerzas que actúan sobre él sea cero.

4
Una partícula está en equilibrio —es decir, no tiene aceleración— en un marco de referencia inercial si la suma vectorial de todas las fuerzas que actúan sobre ella es cero. La expresión equivalente para un cuerpo extendido es que el centro de masa del cuerpo tiene aceleración cero cuando la resultante de todas las fuerzas externas que actúan sobre el cuerpo es cero, esta suele denominarse primera condición de equilibrio. En términos de vectores y componentes.

5
Una segunda condición para que un cuerpo extendido esté en equilibrio es que no debe tener tendencia a girar. Esta condición se basa en la dinámica del movimiento rotacional, exactamente del mismo modo que la primera condición se basa en la primera ley de Newton. La suma de las torcas debidas a todas las fuerzas externas que actúan sobre el cuerpo, con respecto a cualquier punto específico, debe ser cero. Para estar en equilibrio estático, un cuerpo en reposo debe satisfacer ambas condiciones del equilibrio: no tener la tendencia a acelerar como un todo ni empezar a girar.

6
Este cuerpo está en equilibrio estático Este cuerpo no tiene la tendencia a acelerar como un todo, pero tiene una tendencia a empezar a girar Este cuerpo no tiene la tendencia a acelerar como un todo, pero tiene una tendencia a empezar a girar Este cuerpo tiene la tendencia a acelerar como un todo, pero no tiene una tendencia a empezar a girar Este cuerpo tiene la tendencia a acelerar como un todo, pero no tiene una tendencia a empezar a girar

7
En la mayoría de los problemas de equilibrio, una de las fuerzas que actúa sobre un cuerpo es su peso. Necesitamos calcular el torque de esta fuerza. El peso no actúa en un solo punto; se distribuye en todo el cuerpo. No obstante, podemos calcular el torque debido al peso, suponiendo que toda la fuerza de gravedad (peso) se concentra en un punto llamado centro de gravedad “cg”. La aceleración debida a la gravedad disminuye con la altura; sin embargo, si esta variación a lo largo de la dimensión vertical del cuerpo es despreciable, el centro de gravedad es idéntico al centro de masa (cm).
 se concentra en un punto llamado centro de gravedad cg . La aceleración debida a la gravedad disminuye con la altura; sin embargo, si esta variación a lo largo de la dimensión vertical del cuerpo es despreciable, el centro de gravedad es idéntico al centro de masa (cm)..")
8
1. El centro de gravedad ocupa un lugar fijo, y por tanto, independiente de la orientación de los cuerpos respecto a un marco de referencia. 2. El C.G. para algunos cuerpos llamados huecos, o cóncavos, puede ubicarse fuera de ellos, e incluso en algún punto de su borde. 3. Los C.G. siempre se ubican en la zona de mayor concentración de masa. 4. Cuando los cuerpos quedan suspendidos gracias a una fuerza externa, se observara que la recta de acción de esta pasa por el centro de gravedad de dicho cuerpo. 5. Para que un cuerpo apoyado sobre otro se encuentre en equilibrio, se deberá verificar que la línea de acción de su peso siempre intersecta a la base que le sirve de apoyo.

9
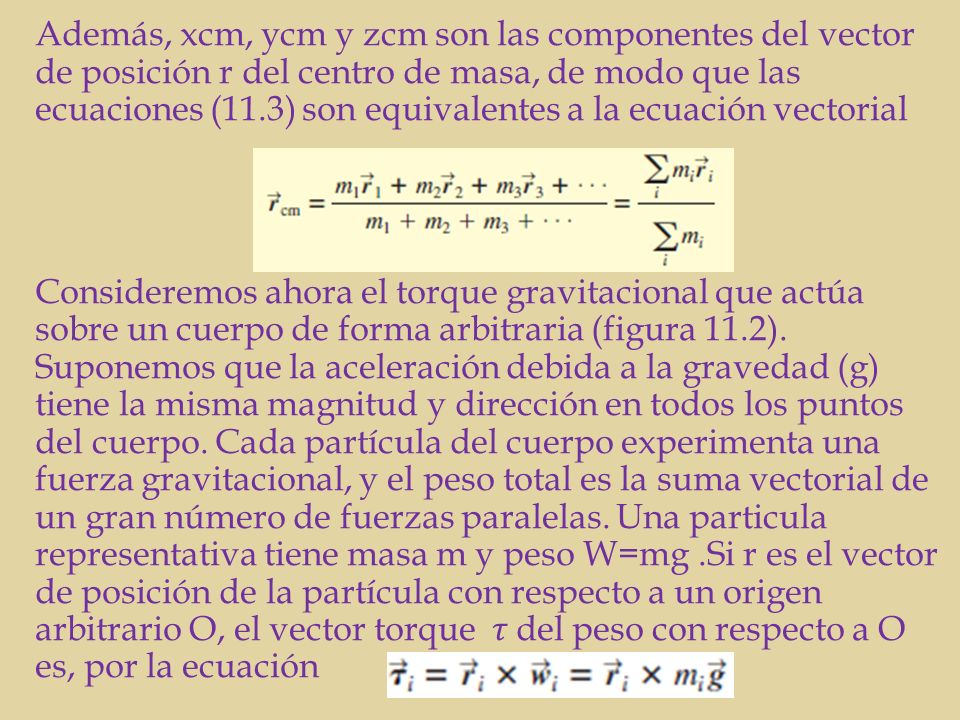
(x1, y1, z1), (x2, y2, z2),..., las coordenadas xcm, ycm y zcm del centro de masa están dadas porRepasemos primero la definición de centro de masa. Para un conjunto de partículas con masas m1, m2,... y coordenadas :

10
Siendo la partícula un ente ideal sin dimensiones, al aplicar estas fórmulas a un sólido los sumandos se hacen infinitos, con lo que los sumatorios se transforman en integrales, y considerando el cuerpo fraccionado en infinitas partículas elementales de masa dm, las ecuaciones anteriores se convierten en: las integrales que nos aparecen son definidas y están limitadas por las dimensiones del sólido.

12
El torque total debida a las fuerzas gravitacionales que actúan sobre todas las partículas es: Si multiplicamos y dividimos esto por la masa total del cuerpo La fracción en esta ecuación no es sino el vector de posición r del centro de masa, con componentes xcm, ycm y zcm dados por la ecuación (11.4), y MG es igual al peso total W del cuerpo. Por lo tanto,

13
A menudo podemos usar consideraciones de simetría para encontrar el centro de gravedad de un cuerpo, igual que hicimos con el centro de masa. El centro de gravedad de una esfera, cubo, disco o placa rectangular está en su centro geométrico. El centro de gravedad de un cilindro o cono circulares rectos está en su eje de simetría. Cuando un cuerpo sobre el que actúa la gravedad se apoya en un solo punto o se cuelga de éste, el centro de gravedad siempre está directamente arriba o abajo de dicho punto de suspensión. Si estuviera en otro lugar, el peso tendría una torca con respecto al punto de suspensión, y el cuerpo no estaría en equilibrio rotacional.

14
El esfuerzo es una cantidad proporcional a la fuerza que produce una deformación. La deformación es una medida del grado de deformación. El esfuerzo es proporcional a la deformación; la constante de proporcionalidad depende del material que se está deformando y de la naturaleza de la deformación. Llamaremos a esta constante de proporcionalidad módulo elástico.

15
Módulo de Young. Mide la resistencia de un sólido a un cambio en su longitud. Módulo de corte. Mide la resistencia al movimiento de los planos de un sólido a deslizar uno sobre otro. Módulo volumétrico. Mide la resistencia que sólidos o líquidos presentan a los cambios en su volumen.

16
Definimos el módulo de Young: Una barra larga sujetada en un extremo se alarga en una cantidad L bajo la accion de una fuerza F.

17
SustanciaMódulo de Young (N/m 2 ) Módulo de corte (N/m 2 ) Módulo volumétrico (N/m 2 ) Aluminio7.0 x 10 10 2.5 x 10 10 7.0 x 10 10 Latón9.1 x 10 10 3.5 x 10 10 6.1 x 10 10 Cobre11 x 10 10 4.2 x 10 10 14 x 10 10 Acero20 x 10 10 8.4 x 10 10 16 x 10 10 Tungsteno35 x 10 10 14 x 10 10 20 x 10 10 Vidrio6.5 – 7.8 x 10 10 2.6 – 3.2 x 10 10 5.0 – 5.5 x 10 10 Cuarzo5.6 x 10 10 2.6 x 10 10 2.7 x 10 10 Agua 0.21 x 10 10 Mercurio 2.8 x 10 10 Tabla 1. Valores comunes para módulos elásticos

18
El límite elástico de una sustancia se define como el máximo esfuerzo que puede aplicarse antes de que se deforme permanentemente. Cuando el esfuerzo supera el límite elástico, el objeto se deforma de manera permanente y no regresa a la forma original después de que se elimina el esfuerzo. Si el esfuerzo se incrementa aun más, el material se rompe.

19
Suponga que el módulo de Young para un hueso es de 1.5 X 10 10 N/m 2, y que un hueso se fractura si se ejerce más de 1.50 x 10 8 N/m 2. a) ¿Cuál es la fuerza máxima que puede ejercerse sobre el hueso fémur en la pierna si este tiene un diámetro efectivo mínimo de 2.50 cm? b) si la fuerza de esta magnitud se aplica compresivamente, ¿cuánto se acorta un hueso de 25.0 cm de largo?
 ¿Cuál es la fuerza máxima que puede ejercerse sobre el hueso fémur en la pierna si este tiene un diámetro efectivo mínimo de 2.50 cm. b) si la fuerza de esta magnitud se aplica compresivamente, ¿cuánto se acorta un hueso de 25.0 cm de largo .")
20
Otro tipo de deformación ocurre cuando un objeto se somete a una fuerza F tangencial a una de sus caras mientras que la cara opuesta se mantiene fija mediante una fuerza f, como la fricción. En este caso el esfuerzo recibe el nombre de esfuerzo de corte.

21
Si el esfuerzo del corte en el acero excede aproximadamente 4.00 x 10 8 N/m 2 el acero se rompe. Determine la fuerza de corte necesaria para: a) cortar un perno de acero de 1.00 cm de diámetro, y b) hacer un hoyo de 1.00 cm de diámetro en una placa de acero de 0.500 cm de espesor. perno F 1 cm Cuando el acero se rompe, el esfuerzo es igual al módulo de corte, entonces Cuando el acero es penetrado, el esfuerzo es igual al módulo de corte pero el área es la lateral del corte, entonces 1 cm 0.5 cm
 cortar un perno de acero de 1.00 cm de diámetro, y b) hacer un hoyo de 1.00 cm de diámetro en una placa de acero de cm de espesor. perno F 1 cm Cuando el acero se rompe, el esfuerzo es igual al módulo de corte, entonces Cuando el acero es penetrado, el esfuerzo es igual al módulo de corte pero el área es la lateral del corte, entonces 1 cm 0.5 cm.")
22
El Módulo volumétrico caracteriza la respuesta de una sustancia a una compresión uniforme. El recíproco del módulo volumétrico se denomina compresibilidad del material

23
Una carga de 200 kg cuelga de un alambre de 4.00 m de largo, con 0.200 x 10 -4 m 2 de área de sección transversal y módulo de Young de 8.00 x 10 10 N/m 2. ¿Cuánto aumenta su longitud? Un cubo de gelatina de 3 cm de altura se somete a una fuerza cortante de 0.5 N en la parte superior y hace que esta se desplace 2.5 mm en la dirección de la fuerza. Encuentre el módulo de corte de la gelatina.

24
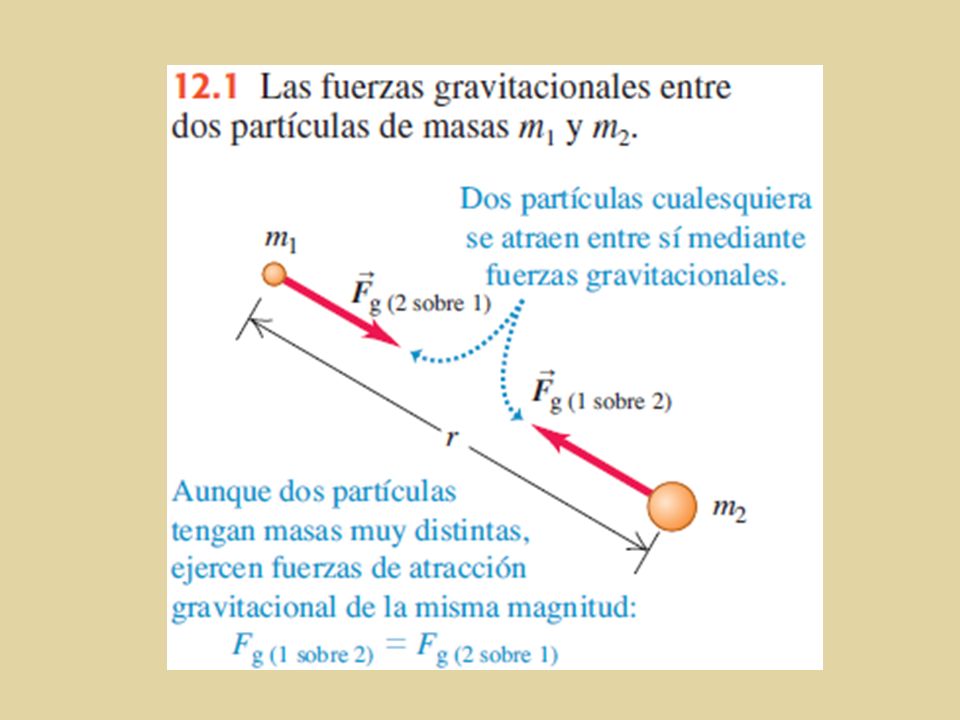
Newton descubrió el carácter fundamental de la atracción gravitacional entre dos cuerpos cualesquiera. Junto con sus tres leyes del movimiento, en 1687 Newton publicó la ley de la gravitación, que puede enunciarse así: Toda partícula de materia en el Universo atrae a todas las demás partículas con una fuerza directamente proporcional al producto de las masas de las partículas, e inversamente proporcional al cuadrado de la distancia que las separa. donde Fg es la magnitud de la fuerza gravitacional que actúa sobre cualesquiera de las partículas, m1 y m2 son sus masas, r es la distancia entre ellas (figura 12.1) y G es una constante física fundamental llamada constante gravitacional.
 y G es una constante física fundamental llamada constante gravitacional..")
26
26 Newton y la interacción gravitatoria Sir Isaac Newton (1642-1727) en 1685 consiguió una teoría que podía explicar el movimiento de todos los cuerpos celestes (planetas, satélites…) y también de todos los cuerpos sobre la superficie terrestre. Su teoría permitía contestar a preguntas como: ¿Qué es lo que causa que los objetos se caigan sobre la tierra? ¿Por qué los planetas giran alrededor del sol? ¿Qué mantiene a las galaxias juntas? Si viajase a otro planeta, ¿por qué cambiaría su peso? Toda su teoría quedo recogida en su libro: "Philosophiæ naturalis principia mathematica“ (1687)
.")
27
27 ???? Años más tarde Galileo defiende en público las teorías de Copérnico y Kepler, la Iglesia de Roma le hace un juicio en el que Galileo tiene que retractarse (negar) de sus teorías bajo amenaza de tortura y muerte. Se dice que mientras el tribunal dictaba sentencia “perdonándole” la vida y condenándole a estar recluido en su casa “Y sin embargo (la tierra) se mueve……” Newton y la interacción gravitatoria
 de sus teorías bajo amenaza de tortura y muerte. Se dice que mientras el tribunal dictaba sentencia perdonándole la vida y condenándole a estar recluido en su casa Y sin embargo (la tierra) se mueve…… Newton y la interacción gravitatoria.")
28
28 Ley de la gravitación universal: “ Las fuerzas con que se atraen dos masa son directamente proporcionales al producto de dichas masas e inversamente proporcional al cuadrado de la distancia que las separa” “Además estas fuerzas actúan en la dirección de la recta que une ambas cargas y cumplen el principio de acción y reacción de Newton” r M1M1 M2M2 G es la constante de proporcionalidad, llamada constante gravitatoria universal cuyo valor (SI) es aproximadamente:
 es aproximadamente:")
30
30 Aspectos Matemáticos de la Ley de gravitación universal: r Q1Q1 Q2Q2 Fuerza que 1 hace sobre 2. Fuerza que 1 hace sobre 2. Necesitamos definir un vector unitario para especificar la dirección de la fuerza. Necesitamos definir un vector unitario para especificar la dirección de la fuerza. Para la fuerza que M 1 realiza (ejerce) sobre M 2 se define, que es un vector en la dirección de la recta que une las cargas y que se aleja de M 1. Para la fuerza que M 1 realiza (ejerce) sobre M 2 se define, que es un vector en la dirección de la recta que une las cargas y que se aleja de M 1. Ley de Newton de la gravitación Universal G es la constante de proporcionalidad, llamada constante gravitatoria universal cuyo valor (SI) es aproximadamente: G es la constante de proporcionalidad, llamada constante gravitatoria universal cuyo valor (SI) es aproximadamente:
 sobre M 2 se define, que es un vector en la dirección de la recta que une las cargas y que se aleja de M 1. Para la fuerza que M 1 realiza (ejerce) sobre M 2 se define, que es un vector en la dirección de la recta que une las cargas y que se aleja de M 1. Ley de Newton de la gravitación Universal G es la constante de proporcionalidad, llamada constante gravitatoria universal cuyo valor (SI) es aproximadamente: G es la constante de proporcionalidad, llamada constante gravitatoria universal cuyo valor (SI) es aproximadamente:.")
31
31 En el año 1543 el sacerdote, matemático y astronomo polaco Nicolás Copérnico (1473-1543) pública su libro “De revolutionibus orbium coelestium” (Sobre las revoluciones de las esferas celestes) fruto de 25 años de trabajo.De revolutionibus orbium coelestium En él defendía la teoría de que la tierra no era el centro del universo (Teoría geocéntrica) sino que todos los planetas del sistema solar (incluida la Tierra) giran alrededor del sol (teoría Heliocéntrica). Modelo Heliocéntrico Modelo Geocéntrico

32
32 Esto permitía explicar (y predecir) de una forma muchos más sencilla el movimiento de los planetas en el cielo. AnimacionAnimacion (orbitas epiciclos) http://www.espacial.org/miscelaneas/biografias/copernico1.htm http://www.espacial.org/miscelaneas/biografias/copernico1.htm Copérnico murió justo después de verlo publicado y posteriormente el libro fue prohibido por herejía. Copérnico: Ptolomeo:
 Copérnico murió justo después de verlo publicado y posteriormente el libro fue prohibido por herejía. Copérnico: Ptolomeo:.")
33
33 Esto permitía explicar (y predecir) de una forma muchos más sencilla el movimiento de los planetas en el cielo. AnimacionAnimacion (orbitas epiciclos) http://www.espacial.org/miscelaneas/biografias/copernico1.htm http://www.espacial.org/miscelaneas/biografias/copernico1.htm Copérnico: Ptolomeo: marte saturno
 Copérnico: Ptolomeo: marte saturno.")
34
34 Esto permitía explicar (y predecir) de una forma muchos más sencilla el movimiento de los planetas en el cielo. AnimacionAnimacion (orbitas epiciclos) http://www.espacial.org/miscelaneas/biografias/copernico1.htm http://www.espacial.org/miscelaneas/biografias/copernico1.htm Copérnico: Ptolomeo: Luna Mercurio
 Copérnico: Ptolomeo: Luna Mercurio.")
35
35 Johanes Kepler (1571, Weil der Stadt, Alemania,-1630, Ratisbona, Alemania) trabajó para Tycho Brahe (y lo sustituyó) en la corte de Rodolfo II en Praga. Pese a que Kepler también fue perseguido, la teoría de Copérnico queda, por fin, totalmente confirmada y respaldada. En 1609 (tras muchos años de estudio, esfuerzo y cálculos basados en las observaciones de Tycho Brahe) publica “ Astronomia Nova” una obra con sus famosas tres leyes sobre los planetas del sistema solar.tres leyes Tycho Brahe Johannes Kepler
 publica Astronomia Nova una obra con sus famosas tres leyes sobre los planetas del sistema solar.tres leyes Tycho Brahe Johannes Kepler.")
36
36 Años más tarde Galileo Galilei (Pisa, 1564- Florencia,1642), el científico, matemático, físico, astrónomo más importante de su tiempo defiende en público las teorías de Copérnico y Kepler Se dice que mientras el tribunal dictaba sentencia “perdonándole” la vida y condenándole a estar recluido en su casa el susurraba: “Eppur si muove…” (… “Y sin embargo (la tierra) se mueve……” ) la Iglesia de Roma le hace un juicio (1633) en el que Galileo tiene que retractarse (negar) de sus teorías bajo amenaza de tortura y muerte.
, el científico, matemático, físico, astrónomo más importante de su tiempo defiende en público las teorías de Copérnico y Kepler Se dice que mientras el tribunal dictaba sentencia perdonándole la vida y condenándole a estar recluido en su casa el susurraba: Eppur si muove… (… Y sin embargo (la tierra) se mueve…… ) la Iglesia de Roma le hace un juicio (1633) en el que Galileo tiene que retractarse (negar) de sus teorías bajo amenaza de tortura y muerte.")
37
37 2. Los planetas, en su recorrido por la elipse, barren áreas iguales en el mismo tiempo. Leyes de Kepler (animacion IyII) animacionIII (animacion IyII) animacionIII 1.Los planetas tienen movimientos elípticos alrededor del Sol, estando éste situado en uno de los focos de la elipse. 3. El cuadrado de los períodos de los planetas (T) es proporcional al cubo de la distancia media al Sol (r).
 animacionIII (animacion IyII) animacionIII 1.Los planetas tienen movimientos elípticos alrededor del Sol, estando éste situado en uno de los focos de la elipse. 3. El cuadrado de los períodos de los planetas (T) es proporcional al cubo de la distancia media al Sol (r)..")
38
38 Leyes de Kepler (animacion IyII) animacionIII (animacion IyII) animacionIII 3ª Ley de Kepler:
 animacionIII (animacion IyII) animacionIII 3ª Ley de Kepler:")
Presentaciones similares














>")




