Descargar la presentación
La descarga está en progreso. Por favor, espere

2
Diseño de Algoritmos Evolutivos para Localización Inicial Optima de Sensores en Plantas Industriales Jessica Andrea Carballido Noviembre, 2005 Defensa de Tesis Doctorado en Cs. de la Computación

3
Noviembre, 2005 Objetivo General: Automatizar la localización de sensores en plantas industriales Objetivo Particular: Automatizar la inicialización del diseño de instrumentación utilizando algoritmos genéticos Objetivo secundario: Lograr un Análisis de Observabilidad más eficiente y eficaz Objetivos

4
Noviembre, 2005 Organización de la charla Localización de sensores Manual Automática: DSS Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA AG-CGD Conclusiones Finales y Trabajos Futuros

5
Noviembre, 2005 Localización de sensores Manual Automática Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA AG-CGD Conclusiones Finales y Trabajos Futuros

6
Noviembre, 2005 Localización de sensores Información Completa del Proceso Industrial: Mejor control sobre el funcionamiento de la planta Menos paradas de planta (beneficio económico) Menos contaminación ambiental Detección temprana de errores Planta con pocos datos ó información imprecisa Planta con información confiable del proceso Modelos matemáticos precisos y rigurosos Buen Diseño de Instrumentación
 Menos contaminación ambiental Detección temprana de errores Planta con pocos datos ó información imprecisa Planta con información confiable del proceso Modelos matemáticos precisos y rigurosos Buen Diseño de Instrumentación")
7
Noviembre, 2005 Diseño de Instrumentación de Plantas Industriales localización de los sensores Determinar la cantidad, tipo y localización de los sensores a ubicar en la planta, a fin de obtener suficiente conocimiento de su funcionamiento. Localización de sensores

8
Noviembre, 2005 Localización de sensores La configuración debe ser confiable, no debe ser demasiado costosa, debe permitir tener un alto grado de conocimiento del funcionamiento de la planta…

9
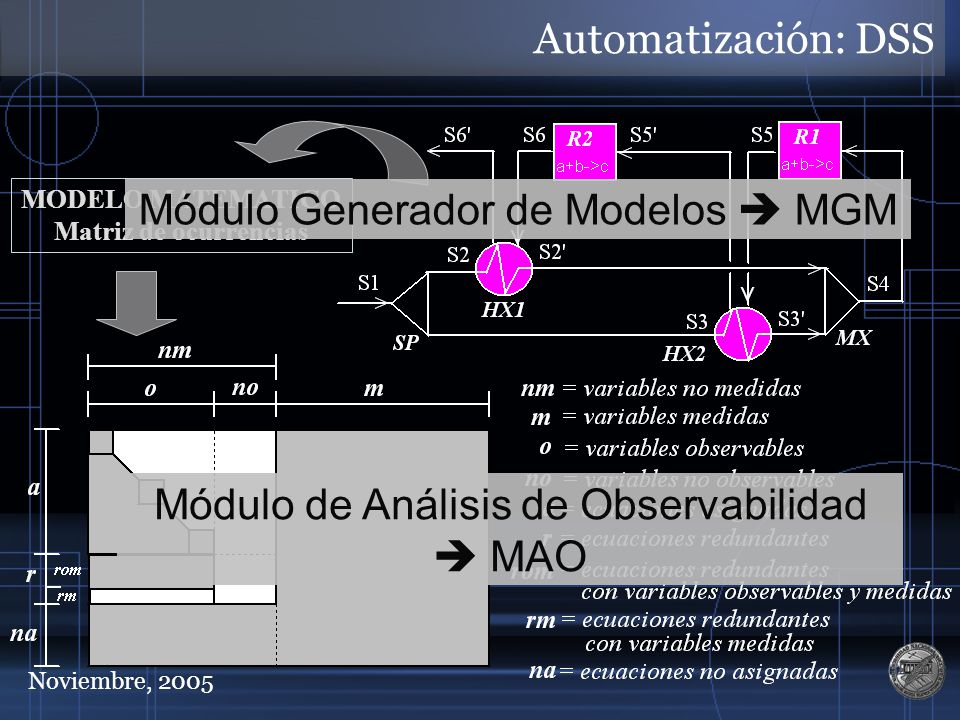
Noviembre, 2005 Automatización: Sistema de Soporte de Decisión (DSS)DSS Asistir al ingeniero en las distintas etapas del DI MGM: Módulo Generador de Modelos MAO: Módulo de Análisis de Observabilidad
DSS Asistir al ingeniero en las distintas etapas del DI MGM: Módulo Generador de Modelos MAO: Módulo de Análisis de Observabilidad")
10
Noviembre, 2005 Automatización: Generador de Modelos MGMMGM

11
Noviembre, 2005 Automatización: Análisis de Observabilidad Iteración Global MGM

12
Noviembre, 2005 * Variables Observables * Secuencia de despejes Iteración Interior Iteración Global Automatización: Análisis de Observabilidad Hasta una hora de trabajo semi-automatizado

13
Noviembre, 2005 Automatización: Sistema de Soporte de Decisión (DSS)
")
14
Noviembre, 2005 Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA Localización de sensores Manual Automática AG-CGD Conclusiones Finales y Trabajos Futuros

15
Noviembre, 2005 Automatización: Inicialización MI Buena localización inicial de sensores Análisis de Observabilidad más eficiente y eficaz

16
Noviembre, 2005 MI con Algoritmos Genéticos Localización inicial de sensores Problema de optimización combinatoria multi-objetivo Debe resolverse en cortos tiempos de cómputo ALGORITMOS GENÉTICOS Debe sugerir un conjunto de soluciones alternativas

17
Noviembre, 2005 MI con Algoritmos Genéticos

18
Noviembre, 2005 Variables del modelo matemático Posibles lugares donde colocar sensores Representación Ej.: Si el modelo matemático contiene 9 variables, una posible configuración estaría representada mediante: [ 0 0 0 1 0 0 1 1 0 ] variable no medida variable medida MI con Algoritmos Genéticos Cromosoma (genotipo) Configuración de sensores Potencial Solución Cadena Binaria
![Noviembre, 2005 Variables del modelo matemático Posibles lugares donde colocar sensores Representación Ej.: Si el modelo matemático contiene 9 variables, una posible configuración estaría representada mediante: [ ] variable no medida variable medida MI con Algoritmos Genéticos Cromosoma (genotipo) Configuración de sensores Potencial Solución Cadena Binaria](http://images.slideplayer.es/13/3925838/slides/slide_18.jpg "Noviembre, 2005 Variables del modelo matemático Posibles lugares donde colocar sensores Representación Ej.: Si el modelo matemático contiene 9 variables, una posible configuración estaría representada mediante: [ ] variable no medida variable medida MI con Algoritmos Genéticos Cromosoma (genotipo) Configuración de sensores Potencial Solución Cadena Binaria")
19
Noviembre, 2005 Evaluación: Enfoque agregativo ** Función de Fitness Multi-Objetivo ** Evalúa la confiabilidad, costo y observabilidad de una configuración (individuo i) F (i) = NR(i) + NOb(i) +1 – NC(i) C(i) = Término de Costo R(i) = Término de Confianza MI con Algoritmos Genéticos
 F (i) = NR(i) + NOb(i) +1 – NC(i) C(i) = Término de Costo R(i) = Término de Confianza MI con Algoritmos Genéticos")
20
Noviembre, 2005 Selección: Método de la ruleta sesgada ** A cada individuo se le asigna una porción de la ruleta de acuerdo a su aptitud. ** Se genera un número aleatorio y de acuerdo a la porción de la ruleta a la que pertenece, se selecciona el individuo correspondiente. MI con Algoritmos Genéticos fitness(A) = 3 fitness(B) = 1 fitness(C) = 2 A C 1/6 = 17% 3/6 = 50% B 2/6 = 33%
 = 3 fitness(B) = 1 fitness(C) = 2 A C 1/6 = 17% 3/6 = 50% B 2/6 = 33%.")
21
Noviembre, 2005 Cruzamiento: Clásico de un punto [ 0 0 0 1 0 0 1 1 0 ] [ 0 1 1 0 0 0 0 0 1 ] [ 0 0 0 1 0 0 0 0 1 ] [ 0 1 1 0 0 0 1 1 0 ] padres hijos MI con Algoritmos Genéticos Mutación: Bit-Flip dinámica y adaptiva [ 0 0 0 1 0 0 1 1 0 ] [ 0 1 0 1 0 0 1 1 0 ] Dinámica: la probabilidad va disminuyendo Adaptiva: los mejores individuos tienen menor probabilidad de mutar
![Noviembre, 2005 Cruzamiento: Clásico de un punto [ ] [ ] [ ] [ ] padres hijos MI con Algoritmos Genéticos Mutación: Bit-Flip dinámica y adaptiva [ ] [ ] Dinámica: la probabilidad va disminuyendo Adaptiva: los mejores individuos tienen menor probabilidad de mutar](http://images.slideplayer.es/13/3925838/slides/slide_21.jpg "Noviembre, 2005 Cruzamiento: Clásico de un punto [ ] [ ] [ ] [ ] padres hijos MI con Algoritmos Genéticos Mutación: Bit-Flip dinámica y adaptiva [ ] [ ] Dinámica: la probabilidad va disminuyendo Adaptiva: los mejores individuos tienen menor probabilidad de mutar")
22
Noviembre, 2005 MI con Algoritmos Genéticos Control de Convergencia Genotípico ESQUEMA Cadena de símbolos del conjunto {0,1,#}, # es un wildcard. 0 1 # # 0 # EJs. INSTANCIAS: 010001, 011101 Si dos padres son instancias del mismo esquema, los hijos también serán instancia de ese esquema

23
Noviembre, 2005 Si un esquema acarrea alto fitness a sus instancias, la población tenderá a converger sobre los bits definidos en ese esquema. MI con Algoritmos Genéticos Control de Convergencia Genotípico Nuestro algoritmo de control de convergencia: Analiza los genotipos de los individuos hasta que un alto porcentaje de ellos es instancia de un mismo esquema

24
Noviembre, 2005 MI con Algoritmos Genéticos Individuos No Factibles Existen variables que representan características de la planta que no pueden ser físicamente medidas (ej. entalpías) Un individuo con al menos un 1 en la posición correspondiente a este tipo de variables se considera no factible SOLUCION: * No generar individuos en la población inicial con 1’s en esas posiciones * Evitar que la mutación modifique los valores en esas posiciones del cromosoma
 Un individuo con al menos un 1 en la posición correspondiente a este tipo de variables se considera no factible SOLUCION: * No generar individuos en la población inicial con 1’s en esas posiciones * Evitar que la mutación modifique los valores en esas posiciones del cromosoma.")
25
Noviembre, 2005 Localización de sensores Manual Automática Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA AG-CGD Conclusiones Finales y Trabajos Futuros AG-THA

26
Noviembre, 2005 AG-THA F (i) = NR(i) + NOb(i) +1 – NC(i) Término de Observabilidad Ob(i) = THA(i) THA (Triangularización Hacia Adelante) Operación sobre matrices que permite conocer el grado de información de la planta que se podría obtener a partir de una configuración (i) Evaluación: Enfoque de agregación
 = NR(i) + NOb(i) +1 – NC(i) Término de Observabilidad Ob(i) = THA(i) THA (Triangularización Hacia Adelante) Operación sobre matrices que permite conocer el grado de información de la planta que se podría obtener a partir de una configuración (i) Evaluación: Enfoque de agregación")
27
Noviembre, 2005 m = [0 0 1 0 0 0 1 1 0]m = [0 0 1 0 1 0 1 1 0] DE: individuo i, matriz de ocurrencias O DS: cantidad de variables despejadas en O a partir de la configuración de sensores definida en i. O: 9 variables, 5 ecuaciones i: posible configuración inicial con v3, v7 y v8 medidas MASCARA m IDENTICA A i m = [0 0 1 0 0 0 1 1 0] AG-THA: Término de Observabilidad
![Noviembre, 2005 m = [ ]m = [ ] DE: individuo i, matriz de ocurrencias O DS: cantidad de variables despejadas en O a partir de la configuración de sensores definida en i.](http://images.slideplayer.es/13/3925838/slides/slide_27.jpg "O: 9 variables, 5 ecuaciones i: posible configuración inicial con v3, v7 y v8 medidas MASCARA m IDENTICA A i m = [ ] AG-THA: Término de Observabilidad.")
28
Noviembre, 2005 Este procedimiento se repite hasta que en un barrido completo de las filas de O no se realiza ninguna modificación en m La salida de la THA es la cantidad de 1’s que se agregaron a m, esto es, el # de variables que se pueden despejar directamente en O con la configuración determinada por i AG-THA: Término de Observabilidad DE: individuo i, matriz de ocurrencias O DS: cantidad de variables despejadas en O a partir de la configuración de sensores definida en i.

29
Noviembre, 2005 Experimentos: Organización AG-THA

30
Noviembre, 2005 Planta de síntesis de amoníaco. Características principales: Proceso Haber-Bosh. Produce 1500 ton/día de amoníaco. El modelo matemático consta de 557 ecuaciones algebraicas no-lineales y 546 variables. AG-THA Experimentos: Caso de Estudio

31
Noviembre, 2005 * Tamaño de la población: 100 individuos * Probabilidad de cruzamiento: 0.7 * Probabilidad Inicial de mutación: 0.0018 (1/longitud del cromosoma) * Longitud del cromosoma: 546 (# de variables en el modelo matemático) Parámetros del AG-THA AG-THA
 * Longitud del cromosoma: 546 (# de variables en el modelo matemático) Parámetros del AG-THA AG-THA")
32
Noviembre, 2005 Config.FitnessCostoObservabilidad MOI A2.538$25,168105286155 B2.502$12,64292275179 C2.512$24,343104298144 3 inidividuos (configuraciones) con mejor fitness Config. Variables Criticas Costo MOIΔC. C. Final A71012 $ 3,645 $28,813 B61013 $ 4,364 $17,006 C71012 $ 3,134 $27,477 Variables críticas: Resultados: Mejores corridas del AE-THA AG-THA

33
Noviembre, 2005 Comparación de costos y niveles de observabilidad: Reducción de tiempo para el AO: 83% * 9 variables críticas quedaron indeterminables * Agregar sensores para medir esas variables produce un incremento en el costo Costo final de la conf. manual + : 17,922 40% de reducción en el # total de variables indeterminables Resultados: Comparación con la inicialización manual AG-THA Config.Costo Observabilidad MOI Manual $ 14,77252257237 B+B+ $ 17,006105289152

34
Noviembre, 2005 AG-THA Conclusiones Al inicializar la instrumentación con el AG-THA se logra: * Mejorar los resultados (configuraciones menos costosas que permiten obtener más conocimiento sobre el funcionamiento del proceso) * Disminuir los tiempo de cómputo y de análisis del experto en la etapa de AO
 * Disminuir los tiempo de cómputo y de análisis del experto en la etapa de AO")
35
Noviembre, 2005 Localización de sensores Manual Automática Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA AG-CGD Conclusiones Finales y Trabajos Futuros AG-CGD

36
Noviembre, 2005 AG-CGD: Término de Observabilidad Evaluación F (i) = NR(i) + NOb(i) +1 – NC(i) Término de Observabilidad Ob(i) = CGD (i) CGD (Coarse Grain Decomposition) Operación sobre grafos que permite conocer el grado de información de la planta que se podría obtener a partir de una configuración (i)
 = NR(i) + NOb(i) +1 – NC(i) Término de Observabilidad Ob(i) = CGD (i) CGD (Coarse Grain Decomposition) Operación sobre grafos que permite conocer el grado de información de la planta que se podría obtener a partir de una configuración (i)")
37
Noviembre, 2005 AG-CGD: Término de Observabilidad 12345678 01101110 00101011 10101110 11011010 01001110 01100100 12345678 [ 00100010] O = i = DE: individuo i, matriz de ocurrencias O DS: cantidad de variables despejadas en O a partir de la configuración de sensores definida en i. 12456837 01011011 00010111 10011011 11110001 01011001 01001010
![Noviembre, 2005 AG-CGD: Término de Observabilidad [ ] O = i = DE: individuo i, matriz de ocurrencias O DS: cantidad de variables despejadas en O a partir de la configuración de sensores definida en i.](http://images.slideplayer.es/13/3925838/slides/slide_37.jpg)
38
Noviembre, 2005 AG-CGD: Término de Observabilidad 124568 1 010110 2 000101 3 100110 4 111100 5 010110 6 010010 Matriz de Ocurrencias O Bigrafo B construido a partir de O

39
Noviembre, 2005 AG-CGD: Término de Observabilidad 124568 1 010110 2 000101 3 100110 4 111100 5 010110 6 010010 Matriz de Ocurrencias O Bigrafo B Pareamiento Maximal de B

40
Noviembre, 2005 AG-CGD: Término de Observabilidad Pareamiento Maximal de B Todas las variables pertenecen al pareamiento Todas las variables son observables si se instrumenta con la configuración definida en i

41
Noviembre, 2005 Experimentos: Organización AG-CGD Caso de Estudio Planta de síntesis de amoníaco Parámetros

42
Noviembre, 2005 CostoError Observabilidad Fitness Tiempo (segs.) MOI AG-THA $12437.783.73E-0630.7175.62126.682.3860529.08327 AG-CGD $9216.883.08E-0622.9178.63131.472.4286514.30172 Resultados: Estadísticas para 100 corridas CostoErrorObservabilidadFitness MOI AG-THA $98200.000003311851172.444 AG-CGD $33640.000001111871352.519 AG-CGD Resultados: Mejor resultado de cada set
 MOI AG-THA $ E AG-CGD $ E Resultados: Estadísticas para 100 corridas CostoErrorObservabilidadFitness MOI AG-THA $ AG-CGD $ AG-CGD Resultados: Mejor resultado de cada set")
43
Noviembre, 2005 AG-CGD CostoErrorObservabilidadFitness MOI AG-CGD $ 33640.000001111871352.519 Se realizó una iteración global del AO inicializando con la configuración AG-CGD Se analizó la calidad de la configuración final Se realizó el AO a partir de una configuración definida por el experto con 11 mediciones y se realizaron tantas iteraciones globales como fuera necesario para alcanzar una configuración con igual grado de observabilidad que la previamente obtenida

44
Noviembre, 2005 AG-CGD Grado de Observabilidad: 62% Costo: $ 3.364 Confiabilidad: 99.9% Grado de Observabilidad: 62% Costo: $ 12.500 Confiabilidad: 99.7%, AO con inicialización del AG-CGD AO con inicialización del experto 11 MEDICIONES 1 ITERACION GLOBAL 11 MEDICIONES 9 ITERACIONES GLOBALES 22 MEDICIONES

45
Noviembre, 2005 Conclusiones Al inicializar la instrumentación con AG-CGD se logra: * Disminuir el tiempo de cómputo del término de observabilidad con respecto a AG-THA * Mejorar los resultados con respecto a una inicialización manual (configuraciones menos costosas que permiten obtener más conocimiento sobre el funcionamiento del proceso) * Disminuir los tiempo de cómputo y de análisis del experto en la etapa de AO AG-CGD
 * Disminuir los tiempo de cómputo y de análisis del experto en la etapa de AO AG-CGD")
46
Noviembre, 2005 Localización de sensores Manual Automática Localización Inicial de Sensores Módulo de Inicialización: Algoritmos Genéticos AG-THA AG-CGD Conclusiones Finales y Trabajos Futuros

47
Noviembre, 2005 Conclusiones Finales Objetivo General: Automatizar el diseño de instrumentación Objetivo Particular: Automatizar la localización inicial de sensores Objetivo Secundario: Hacer más eficiente y eficaz el AO Dos AGs AG-THA AG-CGD AG-CGD supera al AG-THA en calidad de resultados y tiempos de cómputo AO más rápido Configuraciones más precisas, económicas y significativas

48
Noviembre, 2005 Conclusiones Finales

49
Noviembre, 2005 Contribuciones Principales Diseño de la función del fitness Criterio de convergencia basado en un análisis genotípico de la población Ajuste dinámico y adaptivo de los porcentajes de mutación Mecanismo de reducción de las evaluaciones de la función de fitness Tratamiento especial de las posiciones correspondientes a individuos no factibles

50
Noviembre, 2005 Trabajo Futuro Ampliar la funcionalidad del algoritmo genético para que realice todo el AO Contemplar otros objetivos, vinculados con la fase de análisis de redundancias, que constituye la siguiente fase del diseño de instrumentación. Analizar el funcionamiento de los AGs utilizando dominancia de Pareto

51
Noviembre, 2005 por su atención

53
MODELO MATEMATICO Matriz de ocurrencias Automatización: DSS Módulo Generador de Modelos MGM Módulo de Análisis de Observabilidad MAO

Presentaciones similares


















>")
