Descargar la presentación
La descarga está en progreso. Por favor, espere

1
CURSO: UNIDAD 3: COMUNICACIÓN DIGITAL
INTRODUCCION A LAS TELECOMUNICACIONES UNIDAD 3: COMUNICACIÓN DIGITAL INSTRUCTOR: MIGUEL ANGEL PEREZ SOLANO Ingeniero en Comunicaciones y Electrónica Instituto Tecnológico de Oaxaca © ILCEO: ING. MIGUEL ANGEL PEREZ SOLANO

2
ANTECEDENTES CONCEPTUALES
Modulación: Es un proceso en los sistemas de telecomunicaciones utilizado para mezclar dos señales; una de baja frecuencia (información) con una de alta frecuencia (portadora=carrier) obteniendo una señal modulada en la frecuencia de la portadora posibilitando su optima transmisión a través del espacio. Estas técnicas permiten un mejor aprovechamiento del ancho de banda de los canales de comunicación tanto guiados como no guiados haciendo posible transmitir más información en forma simultánea, además de mejorar la resistencia a posibles ruidos e interferencias. Básicamente, la modulación consiste en hacer que un parámetro de la onda portadora (amplitud, frecuencia o fase) de acuerdo con las variaciones de amplitud de la señal modulante, que es la información que queremos transmitir.
 con una de alta frecuencia (portadora=carrier) obteniendo una señal modulada en la frecuencia de la portadora posibilitando su optima transmisión a través del espacio. Estas técnicas permiten un mejor aprovechamiento del ancho de banda de los canales de comunicación tanto guiados como no guiados haciendo posible transmitir más información en forma simultánea, además de mejorar la resistencia a posibles ruidos e interferencias. Básicamente, la modulación consiste en hacer que un parámetro de la onda portadora (amplitud, frecuencia o fase) de acuerdo con las variaciones de amplitud de la señal modulante, que es la información que queremos transmitir.")
3
Por que modular? Si todos los usuarios transmiten a la frecuencia de la señal original o moduladora (frecuencia base), no será posible reconocer la información inteligente contenida en dicha señal, debido a la interferencia entre las señales transmitidas por diferentes usuarios. A altas frecuencias se tiene mayor eficiencia en la transmisión, de acuerdo al medio que se emplee. Se aprovecha mejor el espectro electromagnético, ya que permite la multiplexación por frecuencias. En caso de transmisión inalámbrica, las antenas tienen medidas más razonables en altas frecuencias. En resumen, la modulación permite aprovechar mejor el canal de comunicación ya que posibilita transmitir más información en forma simultánea por un mismo canal y/o proteger la información de posibles interferencias y ruidos.
, no será posible reconocer la información inteligente contenida en dicha señal, debido a la interferencia entre las señales transmitidas por diferentes usuarios. A altas frecuencias se tiene mayor eficiencia en la transmisión, de acuerdo al medio que se emplee. Se aprovecha mejor el espectro electromagnético, ya que permite la multiplexación por frecuencias. En caso de transmisión inalámbrica, las antenas tienen medidas más razonables en altas frecuencias. En resumen, la modulación permite aprovechar mejor el canal de comunicación ya que posibilita transmitir más información en forma simultánea por un mismo canal y/o proteger la información de posibles interferencias y ruidos.")
4
QAM tipos de modulación Lineal AM De onda continua Angular PM
Analógica FM PAM PWM De pulsos PPM Modulación PCM ASK FSK Digital PSK, BPSK, QPSK Mario-PSK QAM

5
3.1.1 Introducción In an analog communication system, the fidelity of the signal must be maintained between the transmitter and the receiver. Any interference, distortion or noise will have a direct impact upon the signal quality at the receiver. In a digital communication system, the role of the receiver is to decide which symbol from a pre-defined alphabet of symbols has been sent. For instance, in a binary signalling system (signals are encoded either ‘1’ or ‘0’), the receiver must decide whether a ‘1’ or ‘0’ was sent. In a very simple system, this could be achieved using threshold detection. In the illustration above, it is evident that in the presence of a small amount of noise, the receiver can easily determine the bits in the data stream that was sent.
, the receiver must decide whether a ‘1’ or ‘0’ was sent. In a very simple system, this could be achieved using threshold detection. In the illustration above, it is evident that in the presence of a small amount of noise, the receiver can easily determine the bits in the data stream that was sent.")
6
Esquemas básicos de modulación digital

7
3.1.2 Teorema de Shannon

8
3.1.3 Modulación digital ASK
In an amplitude shift keyed (ASK) system, the amplitude of the carrier is modulated according to the data stream. Typically, the carrier is pulsed on and off. At the receiver, the signal can be either coherently or non-coherently detected. In the non-coherent case, this means that we can simply detect the envelope of the signal to recover the transmitted signal. In a coherent reception scheme, a phase locked oscillator is required (usually at some lower intermediate frequency) to translate the signal to baseband. When transmitted over a wireless link, the amplitude of the received signal will vary, thus the threshold detection level needs to track this variation. Thus, some form of automatic gain control (AGC) will typically be employed to adjust the received signal strength (RSS). Due to the simplicity in implementation, ASK is typically used in some very low cost, short range telemetry applications.
 system, the amplitude of the carrier is modulated according to the data stream. Typically, the carrier is pulsed on and off. At the receiver, the signal can be either coherently or non-coherently detected. In the non-coherent case, this means that we can simply detect the envelope of the signal to recover the transmitted signal. In a coherent reception. scheme, a phase locked oscillator is required (usually at some lower intermediate frequency) to translate the signal to baseband. When transmitted over a wireless link, the amplitude of the received signal will vary, thus the threshold detection level needs to track this variation. Thus, some form of automatic gain control (AGC) will typically be employed to adjust the received signal strength (RSS). Due to the simplicity in implementation, ASK is typically used in some very low cost, short range telemetry applications.")
9
3.1.4 Modulación digital FSK
In a frequency shift keyed (FSK) system, the carrier frequency is modulated so that a data bit ‘1’ is encoded as f1 and a data bit ‘0’ is encoded as f2. In simple FSK systems, transmitter complexity is similar to that of an ASK system (except that the local oscillator usually requires better frequency stability). Note that the modulated signal has a constant envelope, allowing power efficient RF amplification. FSK is a very popular modulation technique and is used in many different systems. Cellular and cordless radio systems such as GSM and DECT both use FSK.
 system, the carrier frequency is modulated so that a data bit ‘1’ is encoded as f1 and a data bit ‘0’ is encoded as f2. In simple FSK systems, transmitter complexity is similar to that of an ASK system (except that the local oscillator usually requires better frequency stability). Note that the modulated signal has a constant envelope, allowing power efficient RF amplification. FSK is a very popular modulation technique and is used in many different systems. Cellular and cordless radio systems such as. GSM and DECT both use FSK.")
10
3.1.5 Modulación digital PSK
BPSK (solo 2 fases) PSK (varia solo fase) QPSK (4 fases) Mario-PSK (2n fases) QAM (varia fase y amplitud
 PSK. (varia solo fase) QPSK (4 fases) Mario-PSK (2n fases) QAM. (varia fase y amplitud.")
11
ASK, FSK y BPSK en matlab

12
Diagramas de constelación
Signal constellation diagram or constellation diagram is the diagram used to representation of a signal modulated by a digital modulation (PSK Y QAM) and so Signal Constellation diagrams are used only in digital signal/technical ). Constellation diagram can be used to recognize the type of modulation, type of interference effect to signal and distortion in a signal… They are very important in telecommunications. QPSK 8_PSK BPSK
 and so Signal Constellation diagrams are used only in digital signal/technical ). Constellation diagram can be used to recognize the type of modulation, type of interference effect to signal and distortion in a signal… They are very important in telecommunications. QPSK. 8_PSK. BPSK.")
13
3.1.6 Modulación digital QAM
La modulación QAM es una modulación en amplitud y (fase) cuadratura. Esto quiere decir que la señal portadora sera modificada en amplitud y fase, atendiendo a la señal moduladora. Este proceso de batido da lugar a la señal modulada. Así, se pueden obtener distintas combinaciones de amplitud y fase, dando lugar a los diferentes tipos de modulación QAM que existen: 8-QAM, 16-QAM, 32-QAM, 64-QAM, 128-QAM, 256-QAM; donde los numeros indican las posibles combinaciones de amplitud y fase. En QAM al usar distintas combinaciones de amplitud y fase, permite obtener, para una misma velocidad de modulación, una mayor tasa de bits (velocidad de transmisión. Para una velocidad de modulación de X baudios, QAM permite enviar hasta 8 bits por golpe de señal (en 256-QAM). La desventaja de esta modulación: La sincronización
 cuadratura. Esto quiere decir que la señal portadora sera modificada en amplitud y fase, atendiendo a la señal moduladora. Este proceso de batido da lugar a la señal modulada. Así, se pueden obtener distintas combinaciones de amplitud y fase, dando lugar a los diferentes tipos de modulación QAM que existen: 8-QAM, 16-QAM, 32-QAM, 64-QAM, 128-QAM, 256-QAM; donde los numeros indican las posibles combinaciones de amplitud y fase. En QAM al usar distintas combinaciones de amplitud y fase, permite obtener, para una misma velocidad de modulación, una mayor tasa de bits (velocidad de transmisión. Para una velocidad de modulación de X baudios, QAM permite enviar hasta 8 bits por golpe de señal (en 256-QAM). La desventaja de esta modulación: La sincronización.")
14
Diagramas de constelación
32 QAM 16QAM 64QAM

15
3.2 COMUNICACIÓN DE DATOS La comunicación digital o comunicación de datos es una expresión general que puede cubrir cualquier intercambio de información codificada. En un sentido más restringido puede definirse como la “transmisión de datos entre dos o más dispositivos terminales”. Esta definición restringida hace aparecer el importante concepto de “interfaz” entre la fuente generadora de datos y el canal digital propiamente dicho.

16
3.2.1 Transmisión digital de datos
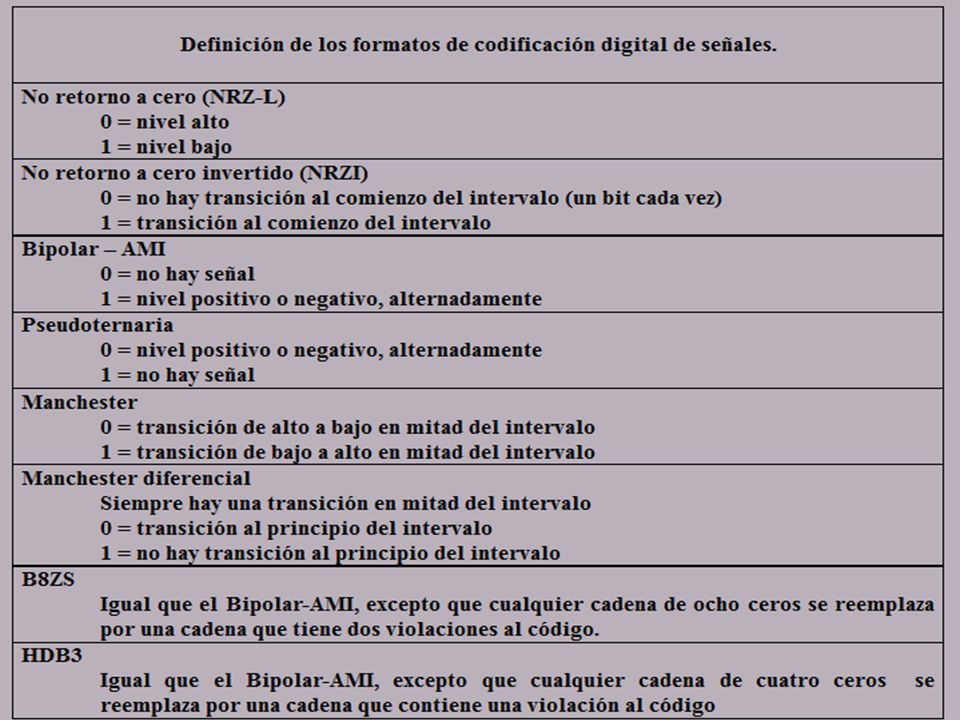
La transmisión digital consiste en el envío de información a través de medios de comunicaciones físicos en forma de señales digitales. Por lo tanto, las señales analógicas deben ser digitalizadas antes de ser transmitidas. Sin embargo, como la información digital no puede ser enviada en forma de 0 y 1, debe ser codificada. Para optimizar la transmisión, la señal debe ser codificada de manera de facilitar su transmisión en un medio físico. Existen varios sistemas de codificación para este propósito, los cuales se pueden dividir en tres categorías: Unipolares Polares Bipolares

17
Unipolar, usa un único valor de nivel, que generalmente representa el ‘1’ y el ‘0’ mantiene la señal a 0. Polar, usa dos niveles de amplitud. Hay varias codificaciones: NRZ, RZ, bifásica, pseudoternaria, manchester y manchester diferencial. Bipolar, usa 3 niveles: positivo, cero y negativo. Tipos: Bipolar con Inversión de marca alternada (AMI), Bipolar con sustitución de 8 ceros (B8ZS) y Bipolar 3 de alta densidad (HDB3).
, Bipolar con sustitución de 8 ceros (B8ZS) y Bipolar 3 de alta densidad (HDB3).")
18
CODIGOS DE LINEA (Ejemplos) VER EL SIGUIENTE ENLACE
 VER EL SIGUIENTE ENLACE")
19
Ejercicio

21
(codificación en MATLAB)
CODIGOS DE LINEA (codificación en MATLAB) Ver archivo .m
 Ver archivo .m.")
22
CODIGOS DE LINEA (B8ZS)
")
23
CODIGOS DE LINEA (HDB3)
")
24
CODIGOS DE LINEA (Resumen)
")
25
Ejercicio

26
(horizontal-vertical)
3.2.2 Detección de errores. Son mecanismos que sirven para guardar la integridad de los datos en una transmisión PARIDAD Simple (horizontal) Par Impar Cruzada (horizontal-vertical) PAR E IMPAR
 Par Impar Cruzada. (horizontal-vertical) PAR E IMPAR.")
27
Ejercicio sobre paridad

28
Paridad horizontal-vertical
La paridad horizontal y vertical es utilizada en algunos códigos de bloque para una combinación de chequeo de (LRC / VRC) para detectar errores. El LRC: Longitudinal Redundancy Checking ("Chequeo de Redundancia Horizontal") y el VRC: Vertical Redundancy Checking ("Chequeo de Redundancia Vertical"). El proceso para calcular la paridad de bloque es el siguiente: Los caracteres a transmitir se agrupan en bloques de n filas y m columnas Se calcula el bit de paridad de cada fila y se añade al principio (o al final, según convenio) de la fila Se calcula el bit de paridad de cada columna y se añade al principio (o al final, según convenio) de la columna El bloque final a transmitir tendrá por tanto una fila y una columna más que el original. La nueva columna estará formada por los bits de paridad horizontal de todas las filas La nueva fila estará formada por los bits de paridad vertical de todas las columnas. Adicionalmente se emplea un bit de paridad cruzada que se calcula a partir de los bits de paridad de filas y columnas
 para detectar errores. El LRC: Longitudinal Redundancy Checking ( Chequeo de Redundancia Horizontal ) y el VRC: Vertical Redundancy Checking ( Chequeo de Redundancia Vertical ). El proceso para calcular la paridad de bloque es el siguiente: Los caracteres a transmitir se agrupan en bloques de n filas y m columnas. Se calcula el bit de paridad de cada fila y se añade al principio (o al final, según convenio) de la fila. Se calcula el bit de paridad de cada columna y se añade al principio (o al final, según convenio) de la columna. El bloque final a transmitir tendrá por tanto una fila y una columna más que el original. La nueva columna estará formada por los bits de paridad horizontal de todas las filas. La nueva fila estará formada por los bits de paridad vertical de todas las columnas. Adicionalmente se emplea un bit de paridad cruzada que se calcula a partir de los bits de paridad de filas y columnas.")
29
Ejemplo

30
1

31
CRC: Cyclic Redundance Check (Chequeo de redundancia cíclica)
Intentando mejorar los códigos que sólo controlan la paridad de bit, aparecen los códigos cíclicos. Estos utilizan la aritmética modular para detectar una mayor cantidad de errores, se usan operaciones en módulo 2 y las sumas y restas se realizan sin acarreo (convirtiéndose en operaciones de tipo Or-Exclusivo o XOR). Además, para facilitar los cálculos se trabaja, aunque sólo teóricamente con polinomios.
. Además, para facilitar los cálculos se trabaja, aunque sólo teóricamente con polinomios.")
32
CRC (chequeo de redundancia ciclica).
El equipo receptor debe comprobar el código CRC para detectar si se han producido o no errores Ejemplo de los cálculos del receptor: 1º Mediante el protocolo correspondiente acuerdan el polinomio generador 2º Divide el código recibido entre el polinomio generador 3º Comprueba el resto de dicha operación 3.1 Si el resto es cero, no se han producido errores 3.2 Procesar el mensaje 3.1 Si el resto es distinto de cero, significa que se han producido errores 3.2 Reenviar el mensaje 3.2 Intentar corregir los errores mediante los códigos correctores

33
TRANSMISION DIGITAL DE DATOS (CRC)
Uno de los códigos para la detección de errores más comunes y más potentes son los de comprobación de redundancia cíclica (CRC), que funcionan de la siguiente forma: se tiene, por ejemplo, un bloque de datos o un mensaje de k-bits, el transmisor genera una secuencia de n-bits, a la cual se le llama secuencia de comprobación de la trama (FCS, Frame Check Sequence), así que la trama resultante, con n + k bits, debe ser divisible por algún numero anteriormente predeterminado; posteriormente, cuando el receptor reciba la trama, la dividirá por el número, y si al hacer la división no se encuentran residuos, quiere decir que la trama no tiene errores, de lo contrario existen errores.
, que funcionan de la siguiente forma: se tiene, por ejemplo, un bloque de datos o un mensaje de k-bits, el transmisor genera una secuencia de n-bits, a la cual se le llama secuencia de comprobación de la trama (FCS, Frame Check Sequence), así que la trama resultante, con n + k bits, debe ser divisible por algún numero anteriormente predeterminado; posteriormente, cuando el receptor reciba la trama, la dividirá por el número, y si al hacer la división no se encuentran residuos, quiere decir que la trama no tiene errores, de lo contrario existen errores.")
34
Ejemplo

35
Código Hamming Publicado en 1950 por Richard Hamming. Se puede detectar error en un bit y corregirlo. Para errores en dos bits se utiliza Hamming extendido (pero no corrige). Se utiliza para reparar errores en la transmisión de datos, donde puede haber pérdidas. Agrega 1 bit adicional de comprobación por cada cuatro bits de datos del mensaje. Bits de paridad: Bits cuya posición es potencia de 2 (1,2,4,8,16,32,64,…) Bits de datos: Bits del resto de posiciones (3,5,6,7,9,10,11,12,13,14,15,17…)
. Se utiliza para reparar errores en la transmisión de datos, donde puede haber pérdidas. Agrega 1 bit adicional de comprobación por cada cuatro bits de datos del mensaje. Bits de paridad: Bits cuya posición es potencia de 2 (1,2,4,8,16,32,64,…) Bits de datos: Bits del resto de posiciones (3,5,6,7,9,10,11,12,13,14,15,17…)")
36
Algoritmo del código Hamming
COMO TRABAJA HAMMING

37
Ejemplo

38
3.2.3 Conversión de datos Los procesos que tienen una realidad física, ya sean de origen natural o artificial, considerados de forma macroscópica presentan un comportamiento analógico. De manera, que cuando se realiza la medida de una magnitud implicada en uno de estos procesos, se obtiene una señal analógica que contiene la información relativa a dicha magnitud. De lo expuesto anteriormente, se desprenden dos afirmaciones ciertas: El mundo real es por naturaleza analógico. En la mayoría de los casos es más adecuado el procesamiento digital. Si se quiere que las máquinas digitales extraigan información del mundo físico y actúen sobre él, es preciso intercalar aentrada y a la salida del sistema digital interfaces convertidores analógico-digital y digital- analógico, respectivamente, que permitan al procesador digital interaccionar con su entorno

39
2.3 CONVERSION ANALOGICO DIGITAL (Definición)
Proceso de llevar una señal analógica al entorno digital FILTRAJEMUESTREOCUANTIZACION CODIFICACION VER VIDEO

40
Teoría del muestreo

41
2.2 CONVERSION ANALOGICO DGITAL (Técnicas de muestreo en matlab)
Una señal analógica, si es de banda limitada debe muestrearse al menos al doble de su frecuencia máxima, esto es fs= 2fmax, Ts = 1/fs = 1/2fmax Una señal s(t), multiplicada por el peine de Dirac, da una señal muestreada s*(t). %primero se genera el peine de Dirac T = 1; t = -10:0.1:10; fun=sin(t); pdirac=0.0; for n=min(t): max(t) pdirac=pdirac+100*sinc(100*(t-T*n)); end subplot (3,1,1); plot (t,fun); subplot (3,1,2); plot (t,pdirac); %luego se generan las muestras mult=fun.*(pdirac); subplot (3,1,3); plot (t,mult);
, multiplicada por el peine de Dirac, da una señal muestreada s*(t). %primero se genera el peine de Dirac. T = 1; t = -10:0.1:10; fun=sin(t); pdirac=0.0; for n=min(t): max(t) pdirac=pdirac+100*sinc(100*(t-T*n)); end. subplot (3,1,1); plot (t,fun); subplot (3,1,2); plot (t,pdirac); %luego se generan las muestras. mult=fun.*(pdirac); subplot (3,1,3); plot (t,mult);")
42
Conversión de Señal Analógica a Señal Digital
Contínua en el tiempo: Existe en todo momento. Contínua en amplitud: Existe en cualquier valor de amplitud. Tiene un número inifinito de valores de amplitud. Señal Digital Discreta en el tiempo: Sólo existe en ciertos valores del tiempo. Discreta en amplitud: Sólo existe en ciertos valores de amplitud. Tiene un número finito de valores de amplitud. Telecomunicaciones Conversión de Señal Analógica a Señal Digital

43
Proceso de Conversión A/D I
f(t) t f(t) d(t) MUESTREO CUANTIZACIÓN CODIFICACIÓN t d(t) MUESTREO Discretización en el tiempo. Toma de muestras de la señal analógica en valores determinados de tiempo. CUANTIZACIÓN Discretización de amplitud. Asignación de los valores de las muestras de la señal analógica a valores discretos, predefinidos, de un conjunto finito de valores. CODIFICACIÓN Representación numérica de los valores cuantizados. Asignación de un valor númérico a cada uno de los valores, ya discretos, de las muestras de la señal analógica. Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 t. f(t) d(t) MUESTREO. CUANTIZACIÓN. CODIFICACIÓN. t. d(t) MUESTREO Discretización en el tiempo. Toma de muestras de la señal analógica en valores determinados de tiempo. CUANTIZACIÓN Discretización de amplitud. Asignación de los valores de las muestras de la señal analógica a valores discretos, predefinidos, de un conjunto finito de valores. CODIFICACIÓN Representación numérica de los valores cuantizados. Asignación de un valor númérico a cada uno de los valores, ya discretos, de las muestras de la señal analógica. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
44
Proceso de Conversión A/D II
f(t) t f(t) Muestreo t t f(t) Codificación Cuantización Valores originales de las muestras Valores cuantizados Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 t. f(t) Muestreo. t. t. f(t) Codificación. Cuantización Valores originales de las muestras. Valores cuantizados. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
45
(infinito número de valores posibles de las muestras)
Muestreo fm(t) t f(t) t señal muestreada (infinito número de valores posibles de las muestras) señal analógica f(t) MUESTREO frecuencia de muestreo Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 t f(t) t. señal muestreada. (infinito número de valores posibles de las muestras) señal. analógica. f(t) MUESTREO. frecuencia de muestreo. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
46
Muestreo Ideal (Instantáneo)
f(t) |F(f)| t f fmax pi (t) |Pi (f)| t f v fm 2 fm 3 fm 4 fm Tm fm = 1/Tm n= + o o k= + o o pi (t) = S d (t - nTm ) Pi (w) = 2p/ Tm S d (w - k wm ) n= - o o k= - o o fmi(t) |Fmi (f)| t f v fm 2 fm 3 fm 4 fm Tm n= + o o n= + o o k= + o o fmi (t) = f(t) S d (t - nTm ) = S f (nTm) d (t - nTm) Fmi (w) = F(w) * Pi (w) = 1/ Tm S F (w - k wm ) n= - o o n= - o o k= - o o Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 |F(f)| t. f. fmax. pi (t) |Pi (f)| t. f. v. fm. 2 fm. 3 fm. 4 fm. Tm. fm = 1/Tm. n= + o. o. k= + o. o. pi (t) = S d (t - nTm ) Pi (w) = 2p/ Tm S d (w - k wm ) n= - o. o. k= - o. o. fmi(t) |Fmi (f)| t. f. v. fm. 2 fm. 3 fm. 4 fm. Tm. n= + o. o. n= + o. o. k= + o. o. fmi (t) = f(t) S d (t - nTm ) = S f (nTm) d (t - nTm) Fmi (w) = F(w) * Pi (w) = 1/ Tm S F (w - k wm ) n= - o. o. n= - o. o. k= - o. o. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
47
Recuperación de la Señal Original a Partir de sus Muestras
fmi(t) |Fmi (f)| t f fm 2 fm 3 fm 4 fm Filtro Pasa-bajas f - fm fm 2 fm 3 fm 4 fm f(t) |F(f)| t f fmax Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 |Fmi (f)| t. f. fm. 2 fm. 3 fm. 4 fm. Filtro. Pasa-bajas. f. - fm. fm. 2 fm. 3 fm. 4 fm. f(t) |F(f)| t. f. fmax. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
48
Consideraciones en la Frecuencia de Muestreo
fmi(t) |Fmi (f)| fm = 1/Tm t f fmax fm 2 fm 3 fm 4 fm Tm fmi(t) |Fmi (f)| fm1 > fm t f fmax fm 2 fm fmi(t) |Fmi (f)| fm2 < fm t f fmax fm 2 fm 3 fm 4 fm Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 |Fmi (f)| fm = 1/Tm. t. f. fmax. fm. 2 fm. 3 fm. 4 fm. Tm. fmi(t) |Fmi (f)| fm1 > fm. t. f. fmax. fm. 2 fm. fmi(t) |Fmi (f)| fm2 < fm. t. f. fmax. fm. 2 fm. 3 fm. 4 fm. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
49
Mínima Frecuencia de Muestreo
fm > 2 fmax | F mi (f)| Telecomunicaciones Conversión de Señal Analógica a Señal Digital
| Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
50
Ejemplos de Muestreo de Señales
Rango de Frecuencias Frecuencia de Muestreo Hz kHz Voz Telefónica ,400 8 Voz de Banda Ancha 50 - 7,000 16 Audio Medio ,000 24 Audio de Banda Ancha (CD) ,000 44.1 Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 , Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
51
Muestreo Natural pp(t) |Pp(f)| t f f(t) |F(f)| fmn(t) |Fmn (f)|
Tm v fm = 1/Tm f(t) |F(f)| fmax a fmn(t) |Fmn (f)| pp (t) = pp(t) = pp(t-nTm) Pp(w) = 2/k S sen(k p a) d (w - k wm ) k= - o o k= + o fmn (t) = f(t) pp(t) Fmn (w) = F(w) * Pp (w) = 1/kp S sen(k p a) F (w - k wm ) 1, 0 < t < a 0, a < t < Tm = , fmn(t) = fmn(t-nTm) f(t), 0 < t < a 0, a < t < Tm 2p / a Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 |F(f)| fmax. a. fmn(t) |Fmn (f)| pp (t) = pp(t) = pp(t-nTm) Pp(w) = 2/k S sen(k p a) d (w - k wm ) k= - o. o. k= + o. fmn (t) = f(t) pp(t) Fmn (w) = F(w) * Pp (w) = 1/kp S sen(k p a) F (w - k wm ) 1, 0 < t < a. 0, a < t < Tm. = , fmn(t) = fmn(t-nTm) f(t), 0 < t < a. 0, a < t < Tm. 2p / a. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
52
Muestreo de Pulso Plano y Sostenido
f(t) |F(f)| t f fmax pq(t) |Pp(f)| t f v 2p / T T 1, 0 < t < T 0, 0 > t > T pq (t) = Pq(w) = 2/w sen( T w_) 2 fmq(t) |Fmq (f)| t f v Fmq (w) = S sen(T w) F(w - k wm ) fm T k= + o o n= + o o Fmq (w) = S sen(T w) F(w - k wm ) 2_ wT fmq (t) = S f(nT) pq(t - nT) k= - o o 2 n= - o o Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 |F(f)| t. f. fmax. pq(t) |Pp(f)| t. f. v. 2p / T. T. 1, 0 < t < T. 0, 0 > t > T. pq (t) = Pq(w) = 2/w sen( T w_) 2. fmq(t) |Fmq (f)| t. f. v. Fmq (w) = S sen(T w) F(w - k wm ) fm. T. k= + o. o. n= + o. o. Fmq (w) = S sen(T w) F(w - k wm ) 2_ wT. fmq (t) = S f(nT) pq(t - nT) k= - o. o. 2. n= - o. o. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
53
(infinito número de valores posibles de las muestras)
Cuantización I fm(t) t fm(t) señal muestreada (infinito número de valores posibles de las muestras) señal cuantizada (N valores posibles) CUANTIZACIÓN Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 t fm(t) señal muestreada. (infinito número de valores posibles de las muestras) señal cuantizada. (N valores posibles) CUANTIZACIÓN. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
54
N = Número de valores discretos
Cuantización II La cuantización asigna a la muestra de f(t) el valor de amplitud más cercano a su valor original de entre los N valores discretos predefinidos, lo que produce un error. El error de cuantización disminuye mientras más valores discretos se definan. f(t) t N1 N2 N3 N4 N5 N6 ec { f(nT) fc(nT) nT Valores originales de las muestras f(nT) = Valor original de f(t) en el tiempo de muestra nT fc(nT) = Valor cuantizado de f(t) en el tiempo de muestra nT ec = error de cuantización = f(nT) - fc(nT) Valores cuantizados N = Número de valores discretos Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 el valor de amplitud más cercano a su valor original de entre los N valores discretos predefinidos, lo que produce un error. El error de cuantización disminuye mientras más valores discretos se definan. f(t) t. N1. N2. N3. N4. N5. N6. ec. { f(nT) fc(nT) nT. Valores originales de las muestras. f(nT) = Valor original de f(t) en el tiempo de muestra nT. fc(nT) = Valor cuantizado de f(t) en el tiempo de muestra nT. ec = error de cuantización = f(nT) - fc(nT) Valores cuantizados. N = Número de valores discretos. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
55
Ejemplos de Número de Valores en la Cuantización
Voz Telefónica Voz de Banda Ancha Audio Medio Audio de Banda Ancha Valores Posibles n 256 65,536 Telecomunicaciones Conversión de Señal Analógica a Señal Digital

56
Codificación I información digital binaria d(t)
código digital de m bits ( N = 2 m ) fm(t) t d(t) información digital binaria representada como señal en el tiempo información digital binaria d(t) (cada muestra representada con m bits) señal cuantizada (N valores posibles) CODIFICACIÓN Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 fm(t) t. d(t) información digital binaria representada como señal en el tiempo información digital binaria d(t) (cada muestra representada con m bits) señal cuantizada. (N valores posibles) CODIFICACIÓN. Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
57
Codificación II La codificación asigna un valor numérico (código digital binario) a cada uno de los N valores discretos utilizados en la cuantización. La representación de N valores a través de un código digital binario corresponde a un número de bits m que cumple con la relación: N = 2m Los números del código digital asignado no necesariamente deben de tener una relación directa con el valor real de la señal original f(t), sino que puede considerarse que f(t) es normalizada para su codificación. Los valores reales de f(t) pueden ser recuperados en el proceso de conversión digital a analógica a través de un proceso de desnormalización (normalmente la multiplicación por una constante y la posible suma o resta de una componente de directa). Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 a cada uno de los N valores discretos utilizados en la cuantización. La representación de N valores a través de un código digital binario corresponde a un número de bits m que cumple con la relación: N = 2m. Los números del código digital asignado no necesariamente deben de tener una relación directa con el valor real de la señal original f(t), sino que puede considerarse que f(t) es normalizada para su codificación. Los valores reales de f(t) pueden ser recuperados en el proceso de conversión digital a analógica a través de un proceso de desnormalización (normalmente la multiplicación por una constante y la posible suma o resta de una componente de directa). Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
58
Características de Conversión A/D de Varias Señales
Telecomunicaciones Conversión de Señal Analógica a Señal Digital

59
Modulación por Código de Pulsos (PCM)
infinito número de valores de las muestras n valores posibles código digital de m bits ( n = 2 m ) señal analógica f(t) información digital binaria MUESTREO CUANTIZACIÓN CODIFICACIÓN frecuencia de muestreo n valores posibles señal analógica f(t) información digital binaria DECODIFICACIÓN De acuerdo a la manera como se realice la codificación se puede tener también: Modulación DELTA (MD) Modulación PCM Diferencial Adaptable (ADPCM) Telecomunicaciones Conversión de Señal Analógica a Señal Digital
 señal. analógica. f(t) información digital binaria. MUESTREO. CUANTIZACIÓN. CODIFICACIÓN. frecuencia de muestreo. n valores posibles. señal. analógica. f(t) información digital binaria. DECODIFICACIÓN. De acuerdo a la manera como se realice la codificación se puede tener también: Modulación DELTA (MD) Modulación PCM Diferencial Adaptable (ADPCM) Telecomunicaciones. Conversión de Señal Analógica a Señal Digital.")
60
3.2.4 Transmision paralela y serial
Transmisión de Datos Paralelo serial Síncrono Asíncrono

61
CONCEPTOS BÁSICOS MODOS DE COMUNICACIÓN
Comunicación de Datos MODOS DE COMUNICACIÓN De acuerdo a la transmisión de flujo de datos, pueden ser: Paralelo serial Carlos Canto Carlos E. Canto Quintal

62
Comunicación Paralela
Comunicación de Datos Comunicación Paralela Carlos E. Canto Quintal

63
Comunicación de Datos Carlos E. Canto Quintal

64
CONCEPTOS BÁSICOS MODOS DE COMUNICACIÓN
De acuerdo al sentido de la transmisión se clasifican en: SIMPLEX HALF DUPLEX O SEMI-DUPLEX FULL DUPLEX O DUPLEX COMPLETO Carlos Canto

65
ES COMUNICACIÓN EN UN SOLO SENTIDO
MODOS DE COMUNICACIÓN SIMPLEX Receptor Dato Transmisor ES COMUNICACIÓN EN UN SOLO SENTIDO

66
SIMPLEX MODOS DE COMUNICACIÓN ES COMUNICACIÓN EN UN SOLO SENTIDO
Transmisor Receptor Dato ES COMUNICACIÓN EN UN SOLO SENTIDO El mensaje siempre viajará de transmisor a receptor

67
SIMPLEX MODOS DE COMUNICACIÓN ES COMUNICACIÓN EN UN SOLO SENTIDO
Transmisor Receptor Dato ES COMUNICACIÓN EN UN SOLO SENTIDO El mensaje siempre viajará de transmisor a receptor

68
SIMPLEX MODOS DE COMUNICACIÓN ES COMUNICACIÓN EN UN SOLO SENTIDO
Transmisor Receptor Dato ES COMUNICACIÓN EN UN SOLO SENTIDO El mensaje siempre viajará de transmisor a receptor

69
COMO EJEMPLO DE COMUNICACIÓN SIMPLEX SE PUEDE MENCIONAR
UNA TRANSMISIÓN DE RADIO O TELEVISIÓN Carlos Canto

70
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

71
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

72
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

73
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

74
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

75
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

76
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

77
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

78
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

79
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

80
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN HALF DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS PERO NO SIMULTÁNEAMENTE Carlos Canto

81
UNA COMUNICACIÓN VIA “ WALKIE TALKIE” ES UN EJEMPLO TÍPICO DE COMUNICACIÓN HALF-DUPLEX
Carlos Canto

82
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

83
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Transmisor Receptor Receptor Transmisor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

84
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

85
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

86
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

87
LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE
MODOS DE COMUNICACIÓN FULL DUPLEX : Receptor Transmisor Transmisor Receptor LA COMUNICACIÓN PUEDE SER EN AMBOS SENTIDOS Y SIMULTÁNEAMENTE Carlos Canto

88
Como un ejemplo de comunicación FULL-DUPLEX
Podríamos mencionar un comunicación vía telefónica, ya que se puede hablar y escuchar simultáneamente Carlos Canto

89
De acuerdo a su temporización
CONCEPTOS BÁSICOS De acuerdo a su temporización pueden ser: SÍNCRONO ASÍNCRONO Carlos Canto

90
Comunicación de Datos In synchronous transmission, we send bits one after another without start/stop bits or gaps. It is the responsibility of the receiver to group the bits. Carlos E. Canto Quintal

91
Comunicación de Datos Carlos E. Canto Quintal

92
Comunicación sincrónica
Se caracteriza porque el dato es enviado junto con la señal de reloj del transmisor Receptor Transmisor Carlos Canto

93
Comunicación sincrónica
Se caracteriza porque el dato es enviado junto con la señal de reloj del transmisor Receptor Dato Transmisor sincronía Carlos Canto

94
Comunicación sincrónica
Se caracteriza porque el dato es enviado junto con la señal de reloj del transmisor Receptor Dato Transmisor sincronía Carlos Canto

95
Comunicación sincrónica
Se caracteriza porque el dato es enviado junto con la señal de reloj del transmisor Receptor Dato Transmisor sincronía Carlos Canto

96
Comunicación sincrónica
Se caracteriza porque el dato es enviado junto con la señal de reloj del transmisor Receptor Dato Transmisor sincronía Carlos Canto

97
Comunicación de Datos En transmisión asíncrona, enviamos 1bit de arranque (0) al inicio y 1 bit o más de parada (1s) al final de cada byte. Podría haber un gap entre cada byte. Carlos E. Canto Quintal
 al inicio y 1 bit o más de parada (1s) al final de cada byte. Podría haber un gap entre cada byte. Carlos E. Canto Quintal.")
98
Comunicación de Datos Asíncrono aquí significa “asíncrono a nivel byte”, pero los bits se mantienen aún sincronizados; sus duraciones son la misma . Carlos E. Canto Quintal

99
Comunicación de Datos Carlos E. Canto Quintal

100
Comunicación asíncrona
Receptor Dato Transmisor Ft=Fr Fr Ft ASÍNCRONO, SIGNIFICA QUE EL TRANSMISOR Y EL RECEPTOR TIENEN SUS PROPIOS GENERADORES DE BAUDAJE CON LA MISMA FRECUENCIA PERO INDEPENDIENTES Carlos Canto

101
Comunicación asíncrona
Receptor Dato Transmisor Ft=Fr Fr Ft NO EXISTE UNA SEÑAL DE SINCRONÍA ENTRE TRANSMISOR Y RECEPTOR Carlos Canto

102
DICHO DE OTRA MANERA: Receptor Dato Transmisor Ambos dispositivos deben manejar la misma velocidad de transmisión aunque cada dispositivo temporiza sus transmisiones independientemente. Carlos Canto

103
3.2.5 Modulación por codificacion de pulsos (PCM)
A digital signal is superior to an analog signal because it is more robust to noise and can easily be recovered, corrected and amplified. For this reason, the tendency today is to change an analog signal to digital data. In this section we describe two techniques, pulse code modulation and delta modulation. Topics discussed in this section: Pulse Code Modulation (PCM) Delta Modulation (DM)
 Delta Modulation (DM)")
104
PCM PCM consists of three steps to digitize an analog signal:
Sampling Quantization Binary encoding Before we sample, we have to filter the signal to limit the maximum frequency of the signal as it affects the sampling rate. Filtering should ensure that we do not distort the signal, ie remove high frequency components that affect the signal shape.

105
Components of PCM encoder

106
Sampling Analog signal is sampled every TS secs.
Ts is referred to as the sampling interval. fs = 1/Ts is called the sampling rate or sampling frequency. There are 3 sampling methods: Ideal - an impulse at each sampling instant Natural - a pulse of short width with varying amplitude Flattop - sample and hold, like natural but with single amplitude value The process is referred to as pulse amplitude modulation PAM and the outcome is a signal with analog (non integer) values
 values.")
107
Three different sampling methods for PCM

108
According to the Nyquist theorem, the sampling rate must be
Note According to the Nyquist theorem, the sampling rate must be at least 2 times the highest frequency contained in the signal.

109
Nyquist sampling rate for low-pass and bandpass signals

110
Recovery of a sampled sine wave for different sampling rates

111
Example Telephone companies digitize voice by assuming a maximum frequency of 4000 Hz. The sampling rate therefore is 8000 samples per second.

112
Example A complex low-pass signal has a bandwidth of 200 kHz. What is the minimum sampling rate for this signal? Solution The bandwidth of a low-pass signal is between 0 and f, where f is the maximum frequency in the signal. Therefore, we can sample this signal at 2 times the highest frequency (200 kHz). The sampling rate is therefore 400,000 samples per second.
. The sampling rate is therefore 400,000 samples per second.")
113
Quantization Sampling results in a series of pulses of varying amplitude values ranging between two limits: a min and a max. The amplitude values are infinite between the two limits. We need to map the infinite amplitude values onto a finite set of known values. This is achieved by dividing the distance between min and max into L zones, each of height = (max - min)/L
/L.")
114
Quantization Levels The midpoint of each zone is assigned a value from 0 to L-1 (resulting in L values) Each sample falling in a zone is then approximated to the value of the midpoint.

115
Quantization Error When a signal is quantized, we introduce an error - the coded signal is an approximation of the actual amplitude value. The difference between actual and coded value (midpoint) is referred to as the quantization error. The more zones, the smaller which results in smaller errors. BUT, the more zones the more bits required to encode the samples -> higher bit rate
 is referred to as the quantization error. The more zones, the smaller which results in smaller errors. BUT, the more zones the more bits required to encode the samples -> higher bit rate.")
116
Quantization Error and SNQR
Signals with lower amplitude values will suffer more from quantization error as the error range: /2, is fixed for all signal levels. Non linear quantization is used to alleviate this problem. Goal is to keep SNQR fixed for all sample values. Two approaches: The quantization levels follow a logarithmic curve. Smaller ’s at lower amplitudes and larger’s at higher amplitudes. Companding: The sample values are compressed at the sender into logarithmic zones, and then expanded at the receiver. The zones are fixed in height.

117
Bit rate and bandwidth requirements of PCM
The bit rate of a PCM signal can be calculated form the number of bits per sample x the sampling rate Bit rate = nb x fs The bandwidth required to transmit this signal depends on the type of line encoding used. Refer to previous section for discussion and formulas. A digitized signal will always need more bandwidth than the original analog signal. Price we pay for robustness and other features of digital transmission.

118
Example 4.14 We want to digitize the human voice. What is the bit rate, assuming 8 bits per sample? Solution The human voice normally contains frequencies from 0 to 4000 Hz. So the sampling rate and bit rate are calculated as follows:

119
PCM Decoder To recover an analog signal from a digitized signal we follow the following steps: We use a hold circuit that holds the amplitude value of a pulse till the next pulse arrives. We pass this signal through a low pass filter with a cutoff frequency that is equal to the highest frequency in the pre-sampled signal. The higher the value of L, the less distorted a signal is recovered.

120
Figure 4.27 Components of a PCM decoder

121
Delta Modulation This scheme sends only the difference between pulses, if the pulse at time tn+1 is higher in amplitude value than the pulse at time tn, then a single bit, say a “1”, is used to indicate the positive value. If the pulse is lower in value, resulting in a negative value, a “0” is used. This scheme works well for small changes in signal values between samples. If changes in amplitude are large, this will result in large errors.

122
The process of delta modulation

123
Delta modulation components

124
Delta demodulation components

125
Delta PCM (DPCM) Instead of using one bit to indicate positive and negative differences, we can use more bits -> quantization of the difference. Each bit code is used to represent the value of the difference. The more bits the more levels -> the higher the accuracy.

126
3.2.8 Interfaces Seriales ¿Qué es la comunicación serial? ¿Qué es RS-232? ¿Qué es RS-422? ¿Qué es RS-485? ¿Qué es handshaking (o intercambio de pulsos de sincronización)?
")
127
¿Qué es la comunicación serial
La comunicación serial es un protocolo muy común para comunicación entre dispositivos que se incluye de manera estándar en prácticamente cualquier computadora. La mayoría de las computadoras incluyen dos puertos seriales RS-232. La comunicación serial es también un protocolo común utilizado por varios dispositivos para instrumentación. Además, la comunicación serial puede ser utilizada para adquisición de datos si se usa en conjunto con un dispositivo remoto de muestreo.

128
¿Qué es la comunicación serial
El concepto de comunicación serial es sencillo. El puerto serial envía y recibe bytes de información un bit a la vez. Aun y cuando esto es más lento que la comunicación en paralelo, que permite la transmisión de un byte completo por vez, este método de comunicación es más sencillo y puede alcanzar mayores distancias. La especificación IEEE 488 para la comunicación en paralelo determina que el largo del cable para el equipo no puede ser mayor a 20 metros; por el otro lado, utilizando comunicación serial el largo del cable puede llegar a los 1200 metros.

129
¿Qué es la comunicación seria
Típicamente, la comunicación serial se utiliza para transmitir datos en formato ASCII. Para realizar la comunicación se utilizan 3 líneas de transmisión: (1) Tierra (o referencia), (2) Transmitir, (3) Recibir. Debido a que la transmisión es asincrónica, es posible enviar datos por un línea mientras se reciben datos por otra.
 Tierra (o referencia), (2) Transmitir, (3) Recibir. Debido a que la transmisión es asincrónica, es posible enviar datos por un línea mientras se reciben datos por otra.")
130
¿Qué es la comunicación serial?
Existen otras líneas disponibles para realizar handshaking, o intercambio de pulsos de sincronización, pero no son requeridas. Las características más importantes de la comunicación serial son: la velocidad de transmisión, los bits de datos, los bits de parada, y la paridad. Para que dos puertos se puedan comunicar, es necesario que las características sean iguales.

131
Velocidad de transmisión (baud rate):
Indica el número de bits por segundo que se transfieren, y se mide en baudios (bauds). Por ejemplo, 300 baudios representa 300 bits por segundo. Cuando se hace referencia a los ciclos de reloj se está hablando de la velocidad de transmisión. Por ejemplo, si el protocolo hace una llamada a 4800 ciclos de reloj, entonces el reloj está corriendo a 4800 Hz, lo que significa que el puerto serial está muestreando las líneas de transmisión a 4800 Hz.
. Por ejemplo, 300 baudios representa 300 bits por segundo. Cuando se hace referencia a los ciclos de reloj se está hablando de la velocidad de transmisión. Por ejemplo, si el protocolo hace una llamada a 4800 ciclos de reloj, entonces el reloj está corriendo a 4800 Hz, lo que significa que el puerto serial está muestreando las líneas de transmisión a 4800 Hz.")
132
Velocidad de transmisión (baud rate):
Las velocidades de transmisión más comunes para las lineas telefónicas son de 14400, 28800, y Es posible tener velocidades más altas, pero se reduciría la distancia máxima posible entre los dispositivos. Las altas velocidades se utilizan cuando los dispositivos se encuentran uno junto al otro, como es el caso de dispositivos GPIB.

133
Bits de datos: Se refiere a la cantidad de bits en la transmisión.
Cuando la computadora envía un paquete de información, el tamaño de ese paquete no necesariamente será de 8 bits. Las cantidades más comunes de bits por paquete son 5, 7 y 8 bits. El número de bits que se envía depende en el tipo de información que se transfiere.

134
Bits de datos: Por ejemplo, el ASCII estándar tiene un rango de 0 a 127, es decir, utiliza 7 bits. Para ASCII extendido es de 0 a 255, lo que utiliza 8 bits. Si el tipo de datos que se está transfiriendo es texto simple (ASCII estándar), entonces es suficiente con utilizar 7 bits por paquete para la comunicación. Un paquete se refiere a una transferencia de byte, incluyendo los bits de inicio/parada, bits de datos, y paridad. Debido a que el número actual de bits depende en el protocolo que se seleccione, el término paquete se usar para referirse a todos los casos.
, entonces es suficiente con utilizar 7 bits por paquete para la comunicación. Un paquete se refiere a una transferencia de byte, incluyendo los bits de inicio/parada, bits de datos, y paridad. Debido a que el número actual de bits depende en el protocolo que se seleccione, el término paquete se usar para referirse a todos los casos.")
135
Bits de parada: Usado para indicar el fin de la comunicación de un solo paquete. Los valores típicos son 1, 1.5 o 2 bits. Debido a la manera como se transfiere la información a través de las líneas de comunicación y que cada dispositivo tiene su propio reloj, es posible que los dos dispositivos no estén sincronizados. Por lo tanto, los bits de parada no sólo indican el fin de la transmisión sino además dan un margen de tolerancia para esa diferencia de los relojes. Mientras más bits de parada se usen, mayor será la tolerancia a la sincronía de los relojes, sin embargo la transmisión será más lenta.

136
Paridad: Es una forma sencilla de verificar si hay errores en la transmisión serial. Existen cuatro tipos de paridad: par, impar, marcada y espaciada. La opción de no usar paridad alguna también está disponible.

137
Paridad: Para paridad par e impar, el puerto serial fijará el bit de paridad (el último bit después de los bits de datos) a un valor para asegurarse que la transmisión tenga un número par o impar de bits en estado alto lógico. Por ejemplo, si la información a transmitir es 011 y la paridad es par, el bit de paridad sería 0 para mantener el número de bits en estado alto lógico como par. Si la paridad seleccionada fuera impar, entonces el bit de paridad sería 1, para tener 3 bits en estado alto lógico.
 a un valor para asegurarse que la transmisión tenga un número par o impar de bits en estado alto lógico. Por ejemplo, si la información a transmitir es 011 y la paridad es par, el bit de paridad sería 0 para mantener el número de bits en estado alto lógico como par. Si la paridad seleccionada fuera impar, entonces el bit de paridad sería 1, para tener 3 bits en estado alto lógico.")
138
Paridad: La paridad marcada y espaciada en realidad no verifican el estado de los bits de datos; simplemente fija el bit de paridad en estado lógico alto para la marcada, y en estado lógico bajo para la espaciada. Esto permite al dispositivo receptor conocer de antemano el estado de un bit, lo que serviría para determinar si hay ruido que esté afectando de manera negativa la transmisión de los datos, o si los relojes de los dispositivos no están sincronizados.

139
RS-232 (Estándar ANSI/EIA-232)
Es el conector serial hallado en las PCs IBM y compatibles. Es utilizado para una gran variedad de propósitos, como conectar un ratón, impresora o modem, así como instrumentación industrial. Gracias a las mejoras que se han ido desarrollando en las líneas de transmisión y en los cables, existen aplicaciones en las que se aumenta el desempeño de RS-232 en lo que respecta a la distancia y velocidad del estándar.

140
RS-232 (Estándar ANSI/EIA-232)
RS-232 está limitado a comunicaciones de punto a punto entre los dispositivos y el puerto serial de la computadora. El hardware de RS-232 se puede utilizar para comunicaciones seriales en distancias de hasta 50 pies. \ / \ /

141
Funciones de los pines en RS-232:
Tierra: GND (pin 5) Otros: RI (pin 9) Datos: TXD (pin 3), RXD (pin 2) Handshake: RTS (pin 7), CTS (pin 8), DSR (pin 6), DCD (pin 1), DTR (pin 4)
 Otros: RI (pin 9) Datos: TXD (pin 3), RXD (pin 2) Handshake: RTS (pin 7), CTS (pin 8), DSR (pin 6), DCD (pin 1), DTR (pin 4)")
142
¿Qué es RS-422? RS-422 (Estándar EIA RS-422-A) es el conector serial utilizado en las computadoras Apple de Macintosh. RS-422 usa señales eléctricas diferenciales, en comparación con señales referenciadas a tierra como en RS-232. La transmisión diferencial, que utiliza dos líneas para transmitir y recibir, tiene la ventaja que es más inmune al ruido y puede lograr mayores distancias que RS-232. La inmunidad al ruido y la distancia son dos puntos clave para ambientes y aplicaciones industriales.

143
¿Qué es RS-485? RS-485 (Estándar EIA-485) es una mejora sobre RS-422 ya que incrementa el número de dispositivos que se pueden conectar (de 10 a 32) y define las características necesarias para asegurar los valores adecuados de voltaje cuando se tiene la carga máxima. Gracias a esta capacidad, es posible crear redes de dispositivos conectados a un solo puerto RS-485.
 es una mejora sobre RS-422 ya que incrementa el número de dispositivos que se pueden conectar (de 10 a 32) y define las características necesarias para asegurar los valores adecuados de voltaje cuando se tiene la carga máxima. Gracias a esta capacidad, es posible crear redes de dispositivos conectados a un solo puerto RS-485.")
144
¿Qué es RS-485? Esta capacidad, y la gran inmunidad al ruido, hacen que este tipo de transmisión serial sea la elección de muchas aplicaciones industriales que necesitan dispositivos distribuidos en red conectados a una PC u otro controlador para la colección de datos, HMI, u otras operaciones. RS-485 es un conjunto que cubre RS-422, por lo que todos los dispositivos que se comunican usando RS-422 pueden ser controlados por RS-485. El hardware de RS-485 se puede utilizar en comunicaciones seriales de distancias de hasta 4000 pies de cable.

145
¿Qué es handshaking ( intercambio de pulsos de sincronización)?
El método de comunicación usado por RS-232 requiere de una conexión muy simple, utilizando sólo tres líneas: Tx, Rx, y GND. Sin embargo, para que los datos puedan ser transmitidos correctamente ambos extremos deben estar sincronizados a la misma velocidad. Aun y cuando este método es más que suficiente para la mayoría de las aplicaciones, es limitado en su respuesta a posibles problemas que puedan surgir durante la comunicación.

146
¿Qué es handshaking ( intercambio de pulsos de sincronización)?
por ejemplo, si el receptor se comienza a sobrecargar de información. Es en estos casos cuando el intercambio de pulsos de sincronización, o handshaking, es útil. Las tres formas más populares de handshaking con RS-232: handshaking for software, handshaking por hardware, y XModem.

147
3.3 Multiplexado y demultiplexado
Proceso que permite que varios usuarios compartan un medio de transmisión VERANO 2012 ING. MAPS

148
{ MULTIPLEXACION (Tipos de multiplexación)
Proceso que permite que varios usuarios compartan un medio de transmisión { Frecuencia (FDMA) Tiempo (TDMA) Código (CDMA) Longitud de onda (WDMA) FDM= Frequency Division Multiplexing TDM= Time División Multiplexing WDM= Code Division Multiplexing VERANO 2012 ING. MAPS
 Tiempo (TDMA) Código (CDMA) Longitud de onda (WDMA) FDM= Frequency Division Multiplexing. TDM= Time División Multiplexing. WDM= Code Division Multiplexing. VERANO 2012 ING. MAPS.")
149
(Proceso de multiplexación y demultiplexación)
MULTIPLEXACION FDM (Proceso de multiplexación y demultiplexación) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
150
(FDM en el dominio del tiempo y en el dominio de la frecuencia)
MULTIPLEXACION FDM (FDM en el dominio del tiempo y en el dominio de la frecuencia) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
151
(Nuevamente en el dominio de la frecuencia)
MULTIPLEXACION FDM (Nuevamente en el dominio de la frecuencia) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
152
(FDM aplicada a la telefonía analógica)
MULTIPLEXACION FDM (FDM aplicada a la telefonía analógica) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
153
(FDM aplicado a enlaces de radio y satelitales)
1.1 MULTIPLEXACION FDM (FDM aplicado a enlaces de radio y satelitales) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
154
(Jerarquía de multiplexación analógica)
MULTIPLEXACION FDM (Jerarquía de multiplexación analógica) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
155
Aplicaciones de FDM en la radiodifusión AM y FM
MULTIPLEXACION FDM Aplicaciones de FDM en la radiodifusión AM y FM VERANO 2012 ING. MAPS

156
(Conceptos de Multiplexación por división de tiempo)
MULTIPLEXACION TDM (Conceptos de Multiplexación por división de tiempo) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
157
MULTIPLEXACION TDM ( Denominaciones)
VERANO 2012 ING. MAPS

158
(TDM: Ejemplo_1 TDM SINCRONA)
MULTIPLEXACION (TDM: Ejemplo_1 TDM SINCRONA) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
159
MULTIPLEXACION TDM (TDM: Ejemplos)
VERANO 2012 ING. MAPS

160
(Sincronización de tramas)
MULTIPLEXACION TDM (Sincronización de tramas) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
161
(Aplicaciones en la telefonía digital)
MULTIPLEXACION TDM (Aplicaciones en la telefonía digital) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
162
(PDH: Jerarquia digital plesiocrona)
MULTIPLEXACION TDM (PDH: Jerarquia digital plesiocrona) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
163
(Multiplexación TDM en el estándar americano)
MULTIPLEXACION TDM (Multiplexación TDM en el estándar americano) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
164
(Redes ópticas síncronas SDH)
MULTIPLEXACION TDM (Redes ópticas síncronas SDH) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
165
MULTIPLEXACION TDM (Multiplexación SDH)
VERANO 2012 ING. MAPS

166
MULTIPLEXACION TDM (TDM Asíncrona)
VERANO 2012 ING. MAPS

167
(Ejemplo de aplicación de TDM asincrona)
MULTIPLEXACION TDM (Ejemplo de aplicación de TDM asincrona) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
168
MULTIPLEXACION WDM (wavelength division multiplexing)
(multiplexación por división por longitud de onda) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
169
MULTIPLEXACION WDM (Sistemas WDM)
VERANO 2012 ING. MAPS

170
(Tipos de sistemas WDM)
1.3 MULTIPLEXACION WDM (Tipos de sistemas WDM) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
171
(Topologías para DWDM)
MULTIPLEXACION TDM (Topologías para DWDM) VERANO 2012 ING. MAPS
 VERANO 2012 ING. MAPS.")
172
MULTIPLEXACION WDM (Topología en anillo)
VERANO 2012 ING. MAPS

173
MULTIPLEXACION WDM (Topología de malla)
VERANO 2012 ING. MAPS

174
FIN DE LA UNIDAD 3

Presentaciones similares



















>")