Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Unidad 1 Programación Lineal

2
1.1 Introducción a la Programación Lineal
¿Qué es un problema? Soluciones: Absolución Resolución Solución Disolución ¿Por qué decimos que un problema es complejo? Análisis de problemas: ¿Quién resuelve los problemas? ¿Qué entendemos por identificar un problema?

3
¿Qué es Investigación de Operaciones?
El uso de las matemáticas y las computadoras para ayudar a tomar decisiones racionales frente a problemas de administración complejos

4
Parte de la información no se conoce con certeza
Aplicación de las técnicas de la administración a problemas (sistemas): Determinísticos Toda la información necesaria para obtener una solución se conoce con certeza Estocásticos Parte de la información no se conoce con certeza
: Determinísticos. Toda la información necesaria para obtener una solución se conoce con certeza. Estocásticos. Parte de la información no se conoce con certeza.")
5
En las Ciencias En Administración
Método Científico para resolver problemas complejos En las Ciencias En Administración Defínase el problema Recoléctense los datos Formulénse hipótesis Pruebénse hipótesis Evalúense resultados Obténganse conclusiones Defínase el problema Recoléctense los datos Defínanse soluciones alternativas Evalúense soluciones alternativas Selecciónese la mejor alternativa Puesta en práctica

6
¿Qué se hace en la realidad?
Estar bien informado Conocer todas las alternativas Ser objetivo (ser optimizador económico) Muchas soluciones Aumentar los criterios Establecer los criterios de solución Definir el problema Buscar las soluciones Solución Satisfactoria Pocas soluciones Disminuir criterios
 Muchas soluciones. Aumentar los criterios. Establecer los criterios de solución. Definir el problema. Buscar las soluciones. Solución Satisfactoria. Pocas soluciones. Disminuir criterios.")
7
¿Qué hace un Director de Empresa para escoger la acción más efectiva para alcanzar las metas de la Organización? Establecer Criterio que usará Seleccionar un conjunto de alternativas para considerarlas Determinar el modelo que se usará y los valores de los parámetros Determinar la alternativa que optimiza el criterio

8
Aportes: Técnicas de Programación Lineal
George Dantzig (USAF), Marshall Wood y Murray Geisler Wassily Leontief (modelo insumo-producto) Método Simplex Gomory (programación lineal discreta) Lester Ford y D. K: Fulkerson (redes, trayectoria crítica) CPM y PERT
, Marshall Wood y Murray Geisler. Wassily Leontief (modelo insumo-producto) Método Simplex. Gomory (programación lineal discreta) Lester Ford y D. K: Fulkerson (redes, trayectoria crítica) CPM y PERT.")
9
CONSTRUCCIÓN DE MODELOS CUANTITATIVOS
Los métodos cuantitativos se emplean: Como guía en la toma de decisiones Como ayuda en la toma de decisiones Para automatizar la toma de decisiones

10
Características de los Sistemas Administrativos
Def: “Sistema.... Tipos de sistemas: Cerrados, abiertos Modelos: Normativos, descriptivos Concretos, Abstractos (verbales o simbólicos) Aplicación (Inventarios) Técnica (Programación Lineal) Comparación de Modelos (validez, confialbilidad y la simplicidad)
 Aplicación (Inventarios) Técnica (Programación Lineal) Comparación de Modelos (validez, confialbilidad y la simplicidad)")
11
Dimensionalidad de los modelos (unidades)
Toma de decisiones Categoría Consecuencia Certidumbre Deterministas Riesgo Probabilísticas Incertidumbre Desconocidas Conflicto Influidas por un oponente Dimensionalidad de los modelos (unidades)
")
12
Uso de Datos para la Toma de Decisiones
“Determina primero los hechos, después puedes tergiversarlos como te plazca”. Mark Twin “Los hechos no dejan de existir porque se ignoren”. Aldous Huxley

13
¿Qué son los datos? Son hechos o conceptos conocidos o supuestos y generalmente se expresan en números Tipos de datos Internos y externos Objetivos y subjetivos Requerimientos de datos en diferentes niveles de la Organización Control operativo Control Administrativo Planeación estratégica

14
Situación: Inversión Considere el problema enfrentado por Mark, graduado de la maestría de administración de empresas, quién recientemente obtuvo un puesto como analista financiero en una compañía de Wall Street. Uno de los beneficios adicionales es un plan de retiro en el que el empleado pone 5% de su ingreso mensual. La compañía iguala esta cantidad. El dinero de este plan es entonces invertido en dos fondos: un fondo de acciones y un fondo de bonos. El Departamento de Beneficios le ha pedido a Mark que especifique la fracción de este dinero que habría que invertir en cada fondo. Mark ha analizado el rendimiento anterior de estos fondos y se ha enterado de que el fondo de acciones ha crecido a una tasa anual promedio de 10%, mientras que el fondo de bonos, ha promediado una retribución anual de 6%. Para diversificar su cartera y para controlar el riesgo, no desea poner todos los huevos en una sola canasta, ha identificado dos pautas: 1. Ninguno de los fondos debe tener más del 75% de la inversión total. 2.La cantidad invertida en el fondo de acciones no debe exceder del doble invertido en el fondo de bonos.

15
Definición del problema
El problema de Mark está bien definido, se conoce el objetivo global, las limitaciones básicas para la toma de decisión Desarrollo del Modelo Matemático Expresar el problema en forma matemática (formular el modelo), por lo que se requiere determinar las variables involucradas
, por lo que se requiere determinar las variables involucradas.")
16
Variables de decisión:
S : Fracción de capital por invertir en acciones B : Fracción de capital por invertir en bonos Para el problema se desean escoger valores para que estas variables: Maximicen la retribución anual esperada Satisfagan todas las pautas de inversión

17
- Función Objetivo El objetivo global de un problema de decisión expresado en una forma matemática en términos de los datos y de las variables de decisión: Maximizar 0,1 S ,06 B - Restricciones (limitaciones) Es un límite sobre los valores de las variables en un modelo matemático típicamente impuestos por condiciones externas.
 Es un límite sobre los valores de las variables en un modelo matemático típicamente impuestos por condiciones externas.")
18
- Ningún fondo tenga más del 75% de lo invertido
S 0,75 (límite superior en el fondo de acciones) B 0,75 (límite superior en el fondo de bonos) - La fracción S invertida en el fondo de acciones no debe exceder del doble de la fracción B invertida en el fondo de bonos S 2 B ó S - 2 B 0 - Cada fracción debe ser no negativa S, B 0
 B 0,75 (límite superior en el fondo de bonos) - La fracción S invertida en el fondo de acciones no debe exceder del doble de la fracción B invertida en el fondo de bonos. S 2 B ó S - 2 B 0. - Cada fracción debe ser no negativa. S, B 0.")
19
Finalmente el modelo resultante es:
Maximizar 0,1 S ,06 B Sujeto a: S 0,75 B 0,75 S B 0 S, B 0

20
Resolución del modelo matemático
Al resolver el problema usando cualquier técnica se tienen los siguientes valores para las variables de decisión: S = 0,75 y B= 0,75 Generando una retribución de: 0,1 * 0, ,06 * 0,75 = 0,12 (12%) ¿? Solver 1
 ¿ Solver 1.")
21
Validación y Control de la Solución
Al observar los valores de las variables de decisión (S=0,75 y B=0,75) se ve que no tienen sentido. No se puede invertir un 75% en ambos fondos simultáneamente. Hay un error, no se incorporó una restricción, esto es, los recursos disponibilidad. S B = 1
 se ve que no tienen sentido. No se puede invertir un 75% en ambos fondos simultáneamente. Hay un error, no se incorporó una restricción, esto es, los recursos disponibilidad. S + B = 1.")
22
Modificación del Modelo
Maximizar 0,1 S ,06 B Sujeto a: S 0,75 B 0,75 S B 0 S B = 1 S, B 0

23
Resolviendo nuevamente se tiene que: S = 0,6667 y B = 0,3333
Finalmente la retribución es 0,1 * 0, ,06 * 0,33333 = 0, (8,667%) Nota: Emplear Solver para determinar el valor de las variables de decisión
 Nota: Emplear Solver para determinar el valor de las variables de decisión.")
24
1.2 Construcción de Modelos de PL
Modelo de Programación Lineal Es un modelo matemático en el que las relaciones entre variables son lineales y donde hay un solo objetivo o medida de rendimiento. La ventaja que tiene el modelo es que existe una técnica matemática que permite determinar la decisión óptima.

25
FORMALIZACIÓN DEL MODELO DE PL
El modelo de PL tiene un conjunto de variables de decisión, una función objetivo la que debe maximizarse o minimizarse y un conjunto de relaciones o restricciones. Z = C1X1 + C2X CnXn Z : es un objetivo económico (beneficios, producción, costos, etc) Ci : coeficientes constantes (factores de ponderación) Xi : variables de decisión (n) sujeto a (Restricciones (m) ): A1X1 + A2X AnXn B1 A1X1 + A2X AnXn Bm
 Ci : coeficientes constantes (factores de ponderación) Xi : variables de decisión (n) sujeto a (Restricciones (m) ): A1X1 + A2X AnXn B A1X1 + A2X AnXn Bm.")
26
Matricialmente se tiene:
Vector de variables o niveles de actividad Vector de “costos” o factor de ponderación

27
A B Vector de variables o niveles de actividad

28
Entonces Optimizar Z = CT X = [c1 c2 c3] = sujeto a A X B y X 0
![Entonces Optimizar Z = CT X = [c1 c2 c3] = sujeto a A X B y X 0](http://slideplayer.es/slide/1834373/7/images/28/Entonces+Optimizar+Z+%3D+CT+X+%3D+%5Bc1+c2+c3%5D+%3D+sujeto+a+A+X+%EF%82%A3+%EF%80%BE+B+y+X+%EF%82%B3+0.jpg "Entonces Optimizar Z = CT X = [c1 c2 c3] = sujeto a A X B y X 0")
29
Ejemplo 1: Una mueblería produce dos tipos de productos, sillas y mesas. Supóngase que el beneficio marginal por cada silla es de $8 y por cada mesa es de $10. Para la producción se dispone de 20 horas hombre (hh) y de 10 unidades de madera (um). Para la construcción de una silla se requieren 8 hh y 2 um, y para la construcción de una mesa se requieren 6 hh y 4 um. ¿Cuántas sillas y mesas se deben construir para obtener el mayor beneficio?.
 y de 10 unidades de madera (um). Para la construcción de una silla se requieren 8 hh y 2 um, y para la construcción de una mesa se requieren 6 hh y 4 um. ¿Cuántas sillas y mesas se deben construir para obtener el mayor beneficio .")
31
Formulación del PL Sea X1 : Nº de sillas X2 : Nº de mesas
Función Objetivo: Max Z = 8X1 + 10X2 Sujeto a: 8X1 + 6X2 // hh 2X1 + 4X2 10 // um X1 0 y X2 (no negatividad)
")
32
Ejemplo 2: Dos productos se elaboran al pasar en forma sucesiva por tres máquinas. El tiempo por máquina asignado a los dos productos está limitado a 10 horas por día El tiempo de producción y la ganancia por unidad de cada producto son: Obtenga el modelo de PL para maximizar la ganancia

33
Solución: 1. Variables de decisión X1 : Cantidad del producto 1
2. Función Objetivo: Maximizar ganancia MAX Z = 2 X1 + 3 X2 3. Restricciones 10 X X2 600 6 X X2 600 8 X X2 600 X1 , X2 0 ó 24 X X2 X1 , X2 0

34
Ejemplo 3: RMC posee una pequeña fábrica de pinturas para interiores y exteriores de casa para su distribución al mayoreo. Se utilizan dos materiales básicos, A y B. La disponibilidad máxima de A es de 6 toneladas diarias, la de B es de 8 toneladas por día. La necesidad diaria de materia prima por tonelada de pintura para interiores y exteriores se resumen en la siguiente tabla: Un estudio de mercado ha establecido que la demanda diaria de pintura para interiores no puede ser mayor que las pinturas para exteriores en más de una tonelada. Asimismo, el estudio señala que la demanda máxima de pintura para interiores está limitada a dos toneladas diarias. El precio al mayoreo es de $3.000 para la pintura de exteriores y $2.000 para la de interiores. ¿Cuánta pintura para exteriores e interiores debe producir la fábrica de pinturas RMC todos los días para maximizar el ingreso bruto?

35
Solución: 1. Variables de decisión
X1 : Toneladas de pintura de exteriores producidas por día X2 : Toneladas de pintura para interiores producidas por día 2. Función Objetivo: Maximizar ganancia MAX Z = 3 X1 + 2 X2 miles de unidades monetarias 3. Restricciones X X2 6 2 X X2 8 - X X2 1 X2 2 X1 , X2 0

36
Ejemplo 4: Una empresa fabrica dos productos, A y B. En su elaboración, cada producto debe pasar por dos secciones. El suministro de mano de obra de la sección 1 es 100 horas y el de la sección 2 es 200 horas. El tiempo de mano de obra cuesta $2 por hora en la sección 1 y $1,5 en la sección 2. Las horas de mano de obra necesarias por unidad de cada producto son las siguientes: La cantidad máxima de unidades de B que puede venderse es igual a treinta; la de A es veinticuatro. La materia prima para cada producto cuesta $5 por unidad. El precio unitario de A es $30 y el de B es $25$ a) Construya el modelo de PL correspondiente.
 Construya el modelo de PL correspondiente.")
37
1.3 Solución de Problemas PL
Existen varias métodos, entre ellos se tiene 1.3.1 Método Gráfico 1.3.2 Método Simplex

38
1.3.1 Método Gráfico Este método es muy limitado por la incapacidad de visualizar más de tres dimensiones. Sin embargo es recomendable usarlo para fijar los conceptos que son aplicables a los otros métodos de resolución.

39
Los pasos a seguir son: Construir el modelo
Graficar cada una de las restricciones en el sistema formado por las variables de decisión. Identificar la región (zona) factible Determinar el valor objetivo (VO) a partir de la función objetivo en cada uno de los vértices de la zona factible. Si es minimizar, considerar el menor o el mayor en caso de maximizar.
 factible. Determinar el valor objetivo (VO) a partir de la función objetivo en cada uno de los vértices de la zona factible. Si es minimizar, considerar el menor o el mayor en caso de maximizar.")
40
Ejemplo PROTRAC produce dos líneas de equipo pesado. Una de estas líneas de productos (llamada equipo para remoción de escombros) se destina esencialmente a aplicaciones de construcción. La otra línea (llamada equipos forestales está destinada a la industria maderera. El miembro más grande de la línea de equipos para remover escombro (el E-9) y el miembro mayor de la línea de equipos forestales (el F-9) se producen en el mismo departamento y con el mismo equipo. Haciendo uso de las predicciones económicas para el próximo mes, el gerente de mercadotecnia de PROTAC juzga que durante ese periodo será posible vender los E-9 y los F-9 que la empresa pueda producir. La administración debe ahora recomendar una meta de producción para el próximo mes. Es decir, ¿cuántos E-9 y F-9 deben producirse?. En la toma de decisión, los principales factores a considerar son los siguientes:
 se destina esencialmente a aplicaciones de construcción. La otra línea (llamada equipos forestales está destinada a la industria maderera. El miembro más grande de la línea de equipos para remover escombro (el E-9) y el miembro mayor de la línea de equipos forestales (el F-9) se producen en el mismo departamento y con el mismo equipo. Haciendo uso de las predicciones económicas para el próximo mes, el gerente de mercadotecnia de PROTAC juzga que durante ese periodo será posible vender los E-9 y los F-9 que la empresa pueda producir. La administración debe ahora recomendar una meta de producción para el próximo mes. Es decir, ¿cuántos E-9 y F-9 deben producirse . En la toma de decisión, los principales factores a considerar son los siguientes:")
41
PROTRAC tendrá una utilidad de $5. 000 por cada E-9 que se venda y $4
PROTRAC tendrá una utilidad de $5.000 por cada E-9 que se venda y $4.000 por cada F-9. Cada producto pasa por operaciones mecánicas tanto en el departamento A como en el departamento B Para la producción del próximo mes, estos dos departamentos tienen disponibles 150 y 160 horas respectivamente. Cada E-9 consume 10 horas en el departamento A y 20 horas en el departamento B, mientras que cada F-9 consume 15 horas en el departamento A y 10 horas en el departamento B.

42
4. Con objeto de cumplir un compromiso con el sindicato, el total de horas de trabajo que se dedicarán a la verificación de los productos terminados del próximo mes no puede ser menor en 10% a una meta establecida de 150 horas. Esta actividad se realiza en un tercer departamento que no tiene relación con los departamentos A y B. Cada E-9 requiere de 30 horas de comprobación y cada F-9, 10 horas. 5. Con el objeto de mantener su posición actual en el mercado, la alta gerencia ha decretado que para la política de operación es necesario construir al menos un F-9 por cada 3 E-9. 6. Un consumidor importante ha ordenado un total de por lo menos cinco aparatos (en cualquier combinación de E-9 y F-9) para el próximo mes, así es que por lo menos debe producirse esa cantidad
 para el próximo mes, así es que por lo menos debe producirse esa cantidad.")
43
Modelo de PL a) Variables de decisión: b) Maximizar Z: c) Sujeto a:
 Variables de decisión: b) Maximizar Z: c) Sujeto a:")
44
Gráfica de PROTRAC Zona factible

45
Gráfica de PROTRAC y función Utilidad

46
Gráfica de PROTRAC y función Utilidad
Solución óptima

47
Cálculo de E y F (Vértice C: Resolver el sistema) 10E + 15F = 150 20E + 10F = 160 E = 4,5 F = 7 y VO = 5.000(4,5) (7) VO =
 (7) VO =")
48
Consumo: (horas) Depto A: (4,5) + 15(7) = 150 Depto B: 20(4,5) +10(7) = 160 Depto Pruebas: 30(4,5) + 10(7) = 205 En los departamentos A y B el consumo es igual a la disponibilidad en cambio en el departamento de pruebas se consumió más del mínimo exigido.

49
1.3.2 Método Simplex 1. Forma estándar del Modelo de PL
2. Soluciones Básicas 3. Método Simplex Primal: Algoritmo

50
A. Forma estándar del Modelo de PL
Todas las restricciones son ecuaciones (con segundos miembros no negativos Todas las variables son no negativas La función Objetivo puede ser maximización o minimización

51
A.1 Restricciones Una restricción del tipo () puede convertirse en ecuación mediante la suma de una variable de holgura (restando una variable de exceso) al primer miembro de la restricción. Ejemplo: desigualdad: 3x1 + 12x2 20 igualdad 3x1 + 12x2 + x3 = con x3 0 desigualdad: 8x1 + 10x2 120 igualdad 8x1 + 10x2 - x4 = con x4 0
 puede convertirse en ecuación mediante la suma de una variable de holgura (restando una variable de exceso) al primer miembro de la restricción. Ejemplo: desigualdad: 3x1 + 12x2 20. igualdad 3x1 + 12x2 + x3 = 20 con x3 0. desigualdad: 8x1 + 10x2 120. igualdad 8x1 + 10x2 - x4 = 120 con x4 0.")
52
A.2 Segundo miembro no negativo
Se multiplica la desigualdad (ecuación) por -1 Ej X1 + 2X2 -5 -3X1 - 2X2 <= 5
 por -1. Ej. 3X1 + 2X2 X1 - 2X2 <= 5.")
53
A.3 Variables irrestrictas
Una variable irrestricta (no restringida) xi puede expresarse en términos de dos variables no negativas mediante el uso de la sustitución: La sustitución debe realizarse en todas las restricciones y en la función objetivo
 xi puede expresarse en términos de dos variables no negativas mediante el uso de la sustitución: La sustitución debe realizarse en todas las restricciones y en la función objetivo.")
54
Forma Estándar Ejemplo:
Escriba el siguiente modelo de PL en la forma estándar: MAX z = 2x1 + 3x2 sujeto a x1 + x2 = 10 -2x1 + 3x2 -5 7x1 - 4x2 6 x1 irrestricta y x2 0

55
Solución

56
A.4 Función Objetivo El modelo estándar de programación lineal puede ser utilizado para resolver problemas del tipo de maximización o de minimización, algunas veces sirve para convertir una forma a la otra. La maximización de una función equivale a la minimización del negativo de la misma función y viceversa. Ejemplo: MAX z = 5x1 + 3x2 + 5x3 es matemáticamente equivalente a MIN (-z) = -5x1 - 3x2 - 5x3
 = -5x1 - 3x2 - 5x3.")
57
B. Soluciones Básicas En un PL con m ecuaciones y n incógnitas
Una solución básica asociada se determina haciendo n-m variables iguales a cero y luego, resolviendo las m ecuaciones con las restantes m incógnitas, siempre que la solución exista y sea única En la PL nos referimos a las n-m variables que se hacen cero como variables no básicas (externas), y a las m variables restantes como variables básicas (siempre que exista una solución única). Se dice que una solución básica es factible si todos los valores de su solución son no negativos
, y a las m variables restantes como variables básicas (siempre que exista una solución única). Se dice que una solución básica es factible si todos los valores de su solución son no negativos.")
58
Algoritmo del método Simplex
INICIO Obtener Forma Estándar (forma aumentada) Construir tabla inicial Mientras NO SEA Óptimo { Identificación variables de entrada/Salida Desarrollo de la tabla revisada } FIN
 Construir tabla inicial. Mientras NO SEA Óptimo. { Identificación variables de entrada/Salida. Desarrollo de la tabla revisada. } FIN.")
59
C. Método Simplex Primal
Construcción de la tabla inicial

60
Ejemplo: Dado el siguiente PL encontrar su solución aplicando el método Simplex

61
Forma Estándar (aumentada)
")
62
Tabla Inicial

63
Solución Inicial:Variable Entrante y Saliente
Mayor contribución

64
Instrucciones

65
Nueva Tabla

66
Segunda Iteración

67
Tabla resultante !Cumple la prueba de optimalidad!

68
Un Problema de Minimización (Penalización: M)
MIN Z = 2 X1 + 8 X2 sa 1) 5 X X2 = 150 2) X1 20 3) X2 14 X1 0
 5 X X2 = ) X1 20. 3) X2 14. X1 0.")
69
Forma estándar: Restricciones:
1) Ya es una igualdad: x x2 = 150 2) Tiene variable de holgura: x x4 = 20 3) Tiene una variable de exceso: x x6 = 14 Resumen: 5 x x = 150 x x = 20 x x6 = 14 ¡¡ No es posible determinar un grupo de variables básicas !!
 Ya es una igualdad: 5 x1 + 10x2 = ) Tiene variable de holgura: x1 + x4 = 20. 3) Tiene una variable de exceso: x2 - x6 = 14. Resumen: 5 x1 + 10x2 = 150. x1 + x4 = 20. x2 - x6 = 14. ¡¡ No es posible determinar un grupo de variables básicas !!")
70
Forma estándar: En el ejemplo anterior (maximización) todas las restricciones tenían variables de holgura las que se consideraban como variables básicas, pero no es así en este caso, por lo tanto hay que que agregar variables artificiales (X3 y X5) asociadas a un costo muy alto (M) para asegurarse que al final sean variables externas y no participen en la solución, para las restricciones 1) y 3). Estas variables artificiales participan en la función objetivo multiplicadas por el coeficiente M.
 todas las restricciones tenían variables de holgura las que se consideraban como variables básicas, pero no es así en este caso, por lo tanto hay que que agregar variables artificiales (X3 y X5) asociadas a un costo muy alto (M) para asegurarse que al final sean variables externas y no participen en la solución, para las restricciones 1) y 3). Estas variables artificiales participan en la función objetivo multiplicadas por el coeficiente M.")
71
Modelo Estándar(Aumentado)
")
72
Tabla Inicial Las variables básicas son: X3, X4 y X5

73
Iteración 1 Entra X2 y sale X5

74
Iteración 2 Entra X6 y sale X3

75
Iteración 3 Entra X1 y sale X6

76
Situación Final La solución es óptima (todos los elementos de la última fila son cero o positivos).
.")
77
4 Análisis de sensibilidad
Sensibilidad implica preguntarse ¿qué sucedería sí … A) Cambia un coeficiente del lado derecho de las restricciones B) Cambia uno de los coeficientes de la función objetivo
 Cambia un coeficiente del lado derecho de las restricciones. B) Cambia uno de los coeficientes de la función objetivo.")
78
4.1 Interpretación Gráfica

79
Ejemplo: Recordando el problema de Protac. Max Z: 5.000 E + 4.000 F sa
E ≥ 0 y F ≥ 0

80
Cambios en los términos independientes La solución era:
F = 7 y Z = Supongamos Que se dispone de una hora adicional en el departamento A (151 horas) Que se dispone de una menos en el departamento A (149 horas) Lo anterior pero para el departamento B
 Que se dispone de una menos en el departamento A (149 horas) Lo anterior pero para el departamento B.")
82
Trazado de la gráfica Caso a)
10 E + 15 F = => E = 151/10 y F = 151/15 Esta recta queda un poco desplazada a la derecha. Su pendiente no cambia, por tanto el punto C se ha trasladado al punto C’. La solución se mantiene en la intersección de las rectas 10 E + 15 F = 151 20 E + 10 F =160

83
C’

84
Trazado de la gráfica Caso b )
10 E + 15 F = => E = 149/10 y F = 149/15 Esta recta queda un poco desplazada a la izquierda. Su pendiente no cambia, por tanto el punto C se ha trasladado al punto C’’. La solución se mantiene en la intersección de las rectas 10 E + 15 F = 149 20 E + 10 F = 160

85
C’’

86
Trazado de la gráfica

87
La solución ahora es: Departamento A (±1 lado derecho)
E = 4,45 F = 7,1 y Z = E = 4,55 F = 7,1 y Z = Departamento B (±1 lado derecho) c1) E = 4,575 F = 6,95 y Z = c2) E = 4,425 F = 7,05 y Z =
 c1) E = 4,575 F = 6,95 y Z = c2) E = 4,425 F = 7,05 y Z =")
88
Diferencia de Z: Departamento A (±1 lado derecho)
Z = y Z’ = ΔZ = 150 Z = y Z’ = ΔZ = -150 Departamento B (±1 lado derecho) c1) Z = y Z’ = ΔZ = 175 c2) Z = y Z’ = ΔZ = -175
 c1) Z = y Z’ = ΔZ = 175. c2) Z = y Z’ = ΔZ =")
89
Definición: Precio dual, valor marginal o precio sombra es el cambio incremental en los beneficios por cambio unitario en el término independiente de una restricción

90
B) Cambios unitarios en los coeficientes de la función objetivo
Coeficiente de E: Z = ,5 E: Z = ,5 Coeficiente de F: Z = F: Z =

91
1. 4. 2 Interpretación de la Tabla Simplex:
Información que se puede obtener de la tabla simplex La solución óptima El estado de los recursos Los precios duales Sensibilidad de la solución óptima a cambios de disponibilidad de recursos, ganancia marginal (coef. de la FO) y uso de recursos.
 y uso de recursos.")
92
Tabla resultante: Solución Óptima

93
Solución óptima (para el problema de maximización)
Variable de Valor decisión óptimo Decisión X /3 Producir 3,333 ton pintura exterior X /3 Producir 1,333 ton pintura interior Z /3 Ganancia resultante unidades $

94
Estado de los Recursos Clasificación de las restricciones: escasa, abundante ya sea que la solución óptima “consuma” o no la cantidad disponible del recurso. Se determina a partir de las variables de holgura: X3 = 0 Escasa Materia Prima A X4 = 0 Escasa Materia Prima B X5 = 3 Abundante Límite en exceso para X1 sobre X2 X6 = 2/3 Abundante Límite en la demanda de X1

95
Precio Dual (Valor unitario de un recurso)
y1 = 1/3 miles de unid mon/ton adicional materia prima A y2 = 1 1/3 miles de unid mon/ton adicional materia prima B y3 = 0 y4 = 0 Esta información se obtiene de la tabla simplex óptima considerando los coeficientes de la fila de Z Base Solución X1 X2 X3 X4 X5 X6 Z 12 2/ /3 1 1/

96
El mismo resultado se puede obtener de la ecuación de Z óptimo:
Z = 12 2/3 - (1/3 X /3 X X X6) Si se cambia X3 de su nivel cero actual, Z cambiará a nivel de 1/3 de miles de unidad monetaria por tonelada. Pero un cambio en X3 equivale a cambiar el recurso A en una cantidad igual X1 + 2 X2 + X3 = 6 Esto significa que el precio dual de la materia prima A es 1/3 Para la materia prima B es 1 1/3 y para los recursos 3 y 4 son cero.
 Si se cambia X3 de su nivel cero actual, Z cambiará a nivel de 1/3 de miles de unidad monetaria por tonelada. Pero un cambio en X3 equivale a cambiar el recurso A en una cantidad igual. X1 + 2 X2 + X3 = 6. Esto significa que el precio dual de la materia prima A es 1/3. Para la materia prima B es 1 1/3 y para los recursos 3 y 4 son cero.")
97
1. Cambio máximo en la disponibilidad de Recursos
Cambiar el recurso materia prima A en la cantidad D1 Esto significa que el recurso materia prima A será 6 + D1 Si D1 > 0, se produce un aumento Si D1 < 0, se produce una disminución

98
¿Cómo hacerlo? A la restricción inicial agregar D1 y resolver aplicando simplex El cambio sólo afecta a la solución (el segundo miembro), considerando que las constantes del segundo miembro nunca se utilizan de pivote.
, considerando que las constantes del segundo miembro nunca se utilizan de pivote.")
99
Iteraciones sucesivas conducen a:
Iteración Ecuación (óptima) z /3 + 1/3 D1 D1 2+ D1 4/3 + 2/3 D1 /3-1/3 D1 D1 /3 - 2/3 D1
 z /3 + 1/3 D D1 2+ D1 4/3 + 2/3 D /3-1/3 D D /3 - 2/3 D1.")
100
Tabla: Solución óptima

101
¿Qué hacer con toda esta información?
Procurar que la solución siga siendo factible Esto significa que las variables básicas no deben ser negativas. Mantener la no negatividad 1) X2 = 4/3 +2/3 D1 0 2) X1 = 10/3 -1/3 D1 0 3) X5 = 3 - D1 0 4) X6 = 2/3 -2/3 D1 0
 X2 = 4/3 +2/3 D1 0. 2) X1 = 10/3 -1/3 D1 0. 3) X5 = 3 - D1 0. 4) X6 = 2/3 -2/3 D1 0.")
102
Se consideran dos casos:
Caso 1: D1 >0 1) Se satisface con cualquier valor 2) D1 10 3) D1 3 4) D1 1 En consecuencia D1 debe ser a lo más 1
 Se satisface con cualquier valor. 2) D1 10. 3) D1 3. 4) D1 1. En consecuencia D1 debe ser a lo más 1.")
103
6 - 2 Materia prima A 6+1 4 Materia prima A 7
Caso 2: D1 < 0 2), 3) y 4) se satisfacen siempre 1) D1 -2 en este caso D1 -2 Resumen: D1 1 6 - 2 Materia prima A 6+1 4 Materia prima A 7
, 3) y 4) se satisfacen siempre. 1) D1 -2. en este caso D1 -2. Resumen: -2 D1 Materia prima A Materia prima A 7.")
104
8 - 2 Materia prima B 8+4 6 Materia prima B 12
Haciendo el mismo análisis para la materia prima B se tiene: -2 D2 4 8 - 2 Materia prima B 8+4 6 Materia prima B 12

105
2. Cambio máximo en la relación Utilidad/Costo marginal
La FO nunca se utiliza como ecuación pivote, por lo tanto cualquier cambio en sus coeficientes la afectarán sólo a ella en la tabla óptima. Pueden ocurrir dos casos: que las variables sean básicas o no en tabla óptima.

106
Caso 1: Variables básicas
Cambiar la ganancia marginal de X1 de 3 a 3 + D1 D1 puede ser positivo o negativo La FO tendrá la forma Z = (3+D1)X1 + 2X2 Utilizando este nuevo coeficiente se llega a la siguiente tabla óptima:
X1 + 2X2. Utilizando este nuevo coeficiente se llega a la siguiente tabla óptima:")
107
Los únicos cambios en los coeficientes no básicos X3 y X4 de la ecuación de Z

108
Estos cambios pueden determinarse de la tabla original, multiplicando los coeficientes no básicos y el segundo miembro de la fila de X1 por D1, y luego sumandolo a la fila Z óptimo.

109
Para el caso de maximización:
1/3 - 1/3 D1 0 y 4/3 + 2/3 D1 0 de la primera D1 1 y de la segunda D1 -2 -2 D1 1 Finalmente: 3-2 C1 3 + 1 1 C1 4 ¡¡¡¡¡ Inténtelo para C2 !!!!!

110
Caso 2: Variables no básicas
Un cambio en los coeficientes objetivos pueden afectar sólo a los coeficientes de la ecuación de Z (la columna correspondiente no se utiliza como pivote). El caso en estudio no sirve porque X1 y X2 son básicas en la tabla óptima.
. El caso en estudio no sirve porque X1 y X2 son básicas en la tabla óptima.")
111
Ejemplo: Sea Z = 5X1 + 2X2 para las mismas restricciones del ejemplo en estudio. La tabla resultante es:

112
X2 es ahora no básica El objetivo es cambiar su coeficiente C2 = 2 a C2 + D2 y luego encontrar el intervalo. Al aplicar el nuevo coeficiente habrá un cambio en el coeficiente de 0,5 a 0,5 - D2 En general, el cambio D del coeficiente objetivo original de una variable no básica conduce SIEMPRE al decremento en la misma cantidad del coeficiente objetivo en la tabla óptima. La tabla permanecerá óptima en tanto que 0,5 -D2 0 esto es, D2 0,5

113
El intervalo es -infinito D2 0,5 +2 -infinito D2 2,5

114
Ejemplo: Resolver el siguiente PL empleando simplex y realizar un análisis de sensibilidad. MAX Z = 3X1 + 2X2 +5X3 sa X1 + 2X2 + X3 ≤ 500 3X X3 ≤ 460 X1 + 4X ≤ 420 X1 ,X2 , X3 ≥ 0

115
1.5 Método Simplex Dual Cuando los problemas de PL no tienen una solución factible básica inicial con sólo holguras, se pueden resolver sin utilizar variables artificiales, entregando la misma información. DEFINICIÓN DEL PROBLEMA DUAL El dual es un problema de PL que se obtiene matemáticamente de un modelo primal de PL dado. Los problemas primal y dual están relacionados a tal grado que la solución de uno de ellos conduce en forma automática a la solución del otro.

116
En la mayoría de los procedimientos de PL, el dual se define para varias formas del primal, dependiendo de los tipos de restricciones, de los signos de las variables y del sentido de la optimización. Se incluirá una definición única del problema dual que incluye automáticamente a todas las formas del primal. Se basa en el hecho de que el problema de PL debe calcularse en forma estándar antes de resolverlo mediante el método simplex o simplex dual, de esta manera al definir el problema dual mediante la forma estándar, los resultados serán consistentes con la información contenida en la tabla simplex..

117
xj 0 La forma estándar general del primal se define como:
maximizar o minimizar i = 1, 2, ....., m j = 1, 2, ..., n sujeto a xj 0 Notar que las n variables xj, incluyen los excesos y las holguras. El esquema se muestra en el siguiente diagrama:

119
El diagrama muestra que el dual se obtiene simétricamente del primal de acuerdo con las siguientes reglas: Para toda restricción primal hay una variable dual Para toda variable primal hay una restricción dual Los coeficientes de las restricciones de una variable primal forman los coeficientes del primer miembro de la restricción dual correspondiente, el coeficiente objetivo de la misma variable se convierte en el segundo miembro de las restricción dual; y el segundo miembro de la restricción primal se convierte en el coeficiente objetivo de la respectiva variable dual Estas reglas indican que el problema dual tendrá m variables (y1, y2, ..., ym) y n restricciones, (correspondientes a x1, x2 ,...., xn).
 y n restricciones, (correspondientes a x1, x2 ,...., xn).")
120
En la tabla siguiente se muestra como determinar los elementos restantes del problema dual: sentido de la optimización, tipo de restricciones y el signo de las variables duales. Función Objetivo Dual Estándar del primal Función objetivo Restricciones Variables Maximización Minimización Irrestrictas Minimización Maximización Irrestrictas Todas las restricciones primales son ecuaciones y todas las variables son no negativas.

121
Ejemplo 1: Primal Maximizar Z = 5 X1 + 12 X2 + 4 X3
sujeto a X1 + 2 X X3 10 2 X X2 + 3 X3 = 8 X1, X2, X3 0 Primal estándar Maximizar Z = 5 X X X X4 sujeto a X1 + 2 X X X4 = 10 2 X X2 + 3 X3 +0 X4 = 8 X1, X2, X3 0

122
Dual Dual Final Minimizar w = 10 y1 + 8 y2 sujeto a X1: y1 + 2 y2 5
y1, y2 irrestricta y1 es irrestricta, pero además está “dominada por y1 0, la restricción dual asociada con X4, entonces al eliminar la redundancia el modelo es: Dual Final Minimizar w = 10 y1 + 8 y2 sujeto a: y1 + 2 y2 5 2 y y2 12 y1 + 3 y2 4 y1 0, y2 irrestricta

123
Programación Lineal Aplicaciones
Unidad 2 Programación Lineal Aplicaciones

124
2.1 Modelo de Transporte El objetivo general es encontrar el mejor plan de distribución, es decir, la cantidad que se debe enviar por cada una de las rutas desde los puntos de suministro hasta los puntos de demanda. El “mejor plan” es aquel que minimiza los costos totales de envío, produzca la mayor ganancia u optimice algún objetivo corporativo. Se debe contar con: Nivel de oferta en cada fuente y la cantidad de demanda en cada destino. ii) Costo de transporte unitario de mercadería desde cada fuente a cada destino.
 Costo de transporte unitario de mercadería desde cada fuente a cada destino.")
125
También es necesario satisfacer ciertas restricciones:
2.1 Modelo de Transporte También es necesario satisfacer ciertas restricciones: 1. No enviar más de la capacidad especificada desde cada punto de suministro (oferta). 2. Enviar bienes solamente por las rutas válidas. 3. Cumplir (o exceder) los requerimientos de bienes en los puntos de demanda.
. 2. Enviar bienes solamente por las rutas válidas. 3. Cumplir (o exceder) los requerimientos de bienes en los puntos de demanda.")
126
Esquemáticamente se podría ver como se muestra en la siguiente figura
Gráficamente: Para m fuentes y n destinos 2.1 Modelo de Transporte Esquemáticamente se podría ver como se muestra en la siguiente figura Fuentes Destinos C11, X11 1 1 d1 s1 Unidades de oferta s2 2 2 d2 Unidades de demanda . . sm m dn n Cmn, Xmn donde Xij: cantidad transportada desde la fuente i al destino j Cij: Costo del transporte unitario desde la fuente i al destino j

127
Modelo general de PL que representa al modelo de Transporte
minimizar s a i=1,2,...,m j=1,2,...,n para toda i y j El modelo implica que al menos la oferta debe ser igual a la demanda

128
Modelo general de PL que representa al modelo de Transporte
Modelo de transporte equilibrado: Oferta = Demanda i=1, 2, 3,....,m j=1, 2, 3,....,n para toda i y j

129
Aplicaciones del modelo de Transporte
El Modelo de Transporte no sólo es aplicable al movimiento de productos, sino que también, como modelo se puede aplicar a otras áreas tales como: Planificación de la Producción Control de Inventarios Control de Proveedores Otras

130
2.1 Modelo de Transporte Ejemplo: RPG tiene cuatro plantas ensambladoras en Europa. Están ubicadas en Leipzig, Alemania (1);Nancy, Francia (2); Lieja, Bélgica (3), y Tilburgo, Holanda (4). Las máquinas ensambladoras usadas en estas plantas se producen en Estados Unidos y se embarcan a Europa. Llegaron a los puertos de Amsterdan (1), Amberes (2) y El Havre (3). Los planes de producción del tercer trimestre (julio a septiembre) ya han sido formulados. Los requerimientos (la demanda en destinos) de motores diesel E-4 son los siguientes:
;Nancy, Francia (2); Lieja, Bélgica (3), y Tilburgo, Holanda (4). Las máquinas ensambladoras usadas en estas plantas se producen en Estados Unidos y se embarcan a Europa. Llegaron a los puertos de Amsterdan (1), Amberes (2) y El Havre (3). Los planes de producción del tercer trimestre (julio a septiembre) ya han sido formulados. Los requerimientos (la demanda en destinos) de motores diesel E-4 son los siguientes:")
131
Planta Cantidad de Motores (1) Leipzig 400 (2) Nancy 900 (3) Lieja 200
2.1 Modelo de Transporte Planta Cantidad de Motores (1) Leipzig 400 (2) Nancy 900 (3) Lieja 200 (4) Tilburgo 500 Total La cantidad disponible de máquinas E-4 en los puertos(oferta en orígenes) son: Puerto Cantidad de Motores (1) Amsterdan 500 (2) Amberes 700 (3) El Hevre 800 Total
 Leipzig 400. (2) Nancy 900. (3) Lieja 200. (4) Tilburgo 500. Total La cantidad disponible de máquinas E-4 en los puertos(oferta en orígenes) son: Puerto Cantidad de Motores. (1) Amsterdan 500. (2) Amberes 700. (3) El Hevre 800. Total")
132
Los costos ($) de transporte de un motor desde un origen a un destino son:
2.1 Modelo de Transporte Al destino Desde el origen 1 2 3 4 12 13 6 10 11 9

133
Construcción del modelo de PL
2.1 Modelo de Transporte 1. Variables de decisión Xij = número de motores enviados del puerto i a la planta j i = 1, 2, 3 j = 1, 2, 3, 4 2. Función Objetivo Minimizar Z = 12 X X12 + 4X13 + 6X14 + 6X21 + 4X X X X31 + 9X X34 + 4X14

134
2) Demanda: Debe satisfacerse la demanda de cada planta
3. Restricciones: 2.1 Modelo de Transporte 1) Oferta: La cantidad de elementos enviados no puede exceder la cantidad disponible X11 + X12 + X13 + X14 X21 + X22 + X23 + X24 X31 + X32 + X33 + X34 2) Demanda: Debe satisfacerse la demanda de cada planta X11 + X21 + X31 400 X12 + X22 + X32 900 X13 + X23 + X33 200 X14 + X24 + X34 500 y de no negatividad Xij 0 para i=1, 2, 3; j= 1, 2, 3, 4
 Oferta: La cantidad de elementos enviados no puede exceder la cantidad disponible. X11 + X12 + X13 + X14 500. X21 + X22 + X23 + X24 700. X31 + X32 + X33 + X34 ) Demanda: Debe satisfacerse la demanda de cada planta. X11 + X21 + X31 400. X12 + X22 + X32 900. X13 + X23 + X33 200. X14 + X24 + X34 500. y de no negatividad. Xij 0 para i=1, 2, 3; j= 1, 2, 3, 4.")
135
Solución del Modelo de Transporte

136
Algoritmos Específicos
2.1 Modelo de Transporte Algoritmos Específicos 2.1.1 Regla de la esquina noroeste (MEN) 2.1.2 Método por aproximación de Vogel (MAV) 2.1.3 Método del costo mínimo (MCM) 2.1.4 Método del paso secuencial y 2.1.5 DIMO (método de distribución modificada)
 Método por aproximación de Vogel (MAV) Método del costo mínimo (MCM) Método del paso secuencial y DIMO (método de distribución modificada)")
137
Descripción de los algoritmos
2.1 Modelo de Transporte Descripción de los algoritmos La regla de la esquina noroeste, el método de aproximación de Vogel y el método del costo mínimo son alternativas para encontrar una solución inicial factible. El método del escalón y el DIMO son alternativas para proceder de una solución inicial factible a la óptima. Por tanto, el primer paso es encontrar una solución inicial factible, que por definición es cualquier distribución de ofertas que satisfaga todas las demandas

138
Descripción de los algoritmos
2.1 Modelo de Transporte Descripción de los algoritmos Una vez obtenida una solución básica factible, el algoritmo procede paso a paso para encontrar un mejor valor para la función objetivo. La solución óptima es una solución factible de costo mínimo Para aplicar los algoritmos, primero hay que construir una tabla de transporte.

139
2.1 Modelo de Transporte Tabla Inicial

140
Tabla Inicial del Ejemplo
2.1 Modelo de Transporte Tabla Inicial del Ejemplo

141
2.1.1 Regla de la esquina Noroeste
2.1 Modelo de Transporte 2.1.1 Regla de la esquina Noroeste Se inicia el proceso desde la esquina izquierda superior Se ubican tantas unidades como sea posible en la ruta Cantidad de Unidades = Mínimo(disponibilidad, demanda) Las siguientes asignaciones se hacen o bien recorriendo hacia la derecha o bien hacia abajo. Las demandas se satisfacen recorriendo sucesivamente de izquierda a derecha y las ofertas se destinan recorriendo de arriba hacia abajo.
 Las siguientes asignaciones se hacen o bien recorriendo hacia la derecha o bien hacia abajo. Las demandas se satisfacen recorriendo sucesivamente de izquierda a derecha y las ofertas se destinan recorriendo de arriba hacia abajo.")
142
2.1 Modelo de Transporte Primera asignación

143
Hasta cuarta asignación
2.1 Modelo de Transporte Hasta cuarta asignación

144
Esquina Noroeste: Solución final factible
2.1 Modelo de Transporte Esquina Noroeste: Solución final factible Valor FO: 400*12+100*13+700*4+100*9+200*12+500*4= $14.200

145
2.1.2 Método de aproximación de Vogel (MAV)
2.1 Modelo de Transporte 2.1.2 Método de aproximación de Vogel (MAV) MAV usa información de costos mediante el concepto de costo de oportunidad para determinar una solución inicial factible. Seleccionar en una fila la ruta más barata y la que le sigue. Hacer su diferencia (penalidad), que es el costo adicional por enviar una unidad desde el origen actual al segundo destino y no al primero. En nuestro caso, para el puerto1, C13 y C14; Penalidad = 6 - 4 MAV asigna un costo de penalidad por no usar la mejor ruta en esta fila.
 MAV usa información de costos mediante el concepto de costo de oportunidad para determinar una solución inicial factible. Seleccionar en una fila la ruta más barata y la que le sigue. Hacer su diferencia (penalidad), que es el costo adicional por enviar una unidad desde el origen actual al segundo destino y no al primero. En nuestro caso, para el puerto1, C13 y C14; Penalidad = MAV asigna un costo de penalidad por no usar la mejor ruta en esta fila.")
146
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Lo anterior se repite para cada fila y cada columna, esto es, determinar todas las penalidades Los pasos iterativos de MAV son los siguientes: 1. Identificar la fila o columna con la máxima penalidad. 2.Colocar la máxima asignación posible a la ruta no usada que tenga menor costo en la fila o columna seleccionada en el punto 1 (los empates se resuelven arbitrariamente) 3. Reajustar la oferta y demanda en vista de esta asignación. 4. Eliminar la columna en la que haya quedado una demanda 0 (o la fila con oferta 0), de consideraciones posteriores. 5. Calcular los nuevos costos de penalidad.
 3. Reajustar la oferta y demanda en vista de esta asignación. 4. Eliminar la columna en la que haya quedado una demanda 0 (o la fila con oferta 0), de consideraciones posteriores. 5. Calcular los nuevos costos de penalidad.")
147
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte El MAV continúa aplicando este proceso en forma sucesiva hasta que se haya obtenido una solución factible. Los resultados obtenidos se muestran en las siguientes tablas

148
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Paso 0: Cálculo de penalidades Paso 1: Identificar máxima penalidad (fila o columna) Calculadas todas las penalidades, la mayor corresponde a la columna 3 (penalidad = 6)
 Calculadas todas las penalidades, la mayor corresponde a la columna 3 (penalidad = 6)")
149
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Paso 2: Asignación de unidades (MIN(oferta,demanda)) Paso 3:Reajuste de oferta y demanda
) Paso 3:Reajuste de oferta y demanda.")
150
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Paso 4: Eliminar columna (fila) con demanda (oferta) 0
 con demanda (oferta) 0.")
151
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Paso 5: Calcular los nuevos costos de penalidad

152
2.1.2 Método de aproximación de Vogel
2.1 Modelo de Transporte Repitiendo los pasos anteriores, finalmente se llega a la siguiente solución ¿Es solución factible? ¿m + n - 1 = 6? SI Costo: 200*4+300*6+700*4+400*10+200*9+200*4 = $12.000

153
2.1.3. Método del Costo Mínimo
2.1 Modelo de Transporte Fundamento Asignar la mayor cantidad de unidades a una ruta disponible de costo mínimo Algoritmo Dada una tabla de transporte Asignar la mayor cantidad de unidades a la variable (ruta) con el menor costo unitario de toda la tabla. Tachar la fila o columna satisfecha. Ajustar oferta y demanda de todas las filas y columnas Si hay más de una fila o columna no tachada repetir los puntos 2, 3 y 4
 con el menor costo unitario de toda la tabla. Tachar la fila o columna satisfecha. Ajustar oferta y demanda de todas las filas y columnas. Si hay más de una fila o columna no tachada repetir los puntos 2, 3 y 4.")
154
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Ejemplo: Aplicar MCM a la tabla de transporte Existen tres rutas costo mínimo. Elijamos la 1_3 Paso 2 Unidades a asignar = MIN(200,400) = 200
 = 200.")
155
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 3: Tachar fila o columna (columna 3) Paso 4 Ajustar ofertas y demandas (fila 1 y columna 3) Paso 5 Aún quedan más de una fila o columna sin tachar. Ir a paso 2
 Paso 4. Ajustar ofertas y demandas (fila 1 y columna 3) Paso 5. Aún quedan más de una fila o columna sin tachar. Ir a paso 2.")
156
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 2: Ruta de costo menor -> 3_4 (ó 2_2) Unidades = MIN(500,800) = 500 Paso 3: Tachar columna 4 Paso 4: Tachar ajustar fila 3 y columna 4 Paso 5 Aún quedan más de una fila o columna sin tachar. Ir a paso 2
 Unidades = MIN(500,800) = 500. Paso 3: Tachar columna 4. Paso 4: Tachar ajustar fila 3 y columna 4. Paso 5. Aún quedan más de una fila o columna sin tachar. Ir a paso 2.")
157
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 2: Ruta de costo menor -> 2_2 Unidades = MIN(700,900) = 300 Paso 3: Tachar fila2 Paso 4: Tachar ajustar fila 2 y columna 2 Paso 5 Aún quedan más de una fila o columna sin tachar. Ir a paso 2
 = 300. Paso 3: Tachar fila2. Paso 4: Tachar ajustar fila 2 y columna 2. Paso 5. Aún quedan más de una fila o columna sin tachar. Ir a paso 2.")
158
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 2: Ruta de costo menor -> 3_2 Unidades = MIN(200,300) = 200 Paso 3: Tachar columna 2 Paso 4: Tachar ajustar fila 3 y columna 2 Paso 5 Aún quedan más de una fila o columna sin tachar. Ir a paso 2
 = 200. Paso 3: Tachar columna 2. Paso 4: Tachar ajustar fila 3 y columna 2. Paso 5. Aún quedan más de una fila o columna sin tachar. Ir a paso 2.")
159
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 2: Ruta de costo menor -> 3_1 Unidades = MIN(400,100) = 100 Paso 3: Tachar fila 3 Paso 4: Tachar ajustar fila 3 y columna 1 Paso 5 Aún quedan más de una fila o columna sin tachar. Ir a paso 2
 = 100. Paso 3: Tachar fila 3. Paso 4: Tachar ajustar fila 3 y columna 1. Paso 5. Aún quedan más de una fila o columna sin tachar. Ir a paso 2.")
160
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte Paso 2: Ruta de costo menor -> 1_1 Unidades = MIN(300,300) = 300 Paso 3: Tachar fila 1 ó columna 1 (sólo una de ellas) Paso 4: Tachar ajustar fila 1 y columna 1 Paso 5 Queda sólo una fila sin tachar. Terminar
 = 300. Paso 3: Tachar fila 1 ó columna 1 (sólo una de ellas) Paso 4: Tachar ajustar fila 1 y columna 1. Paso 5. Queda sólo una fila sin tachar. Terminar.")
161
2.1.3. Método del Costo Mínimo (cont.)
2.1 Modelo de Transporte ¿Es solución factible? ¿m + n - 1 = 6? SI Costo: 300*12+200*4+700*4+100*10+200*9+500*4 = $12.000 Comparación de los resultados Método Rutas Costo MEN $14.200 MAV $12.000 MCM $12.000 Conclusión Los tres métodos entregan soluciones básicas factibles, pero ninguno asegura que la solución sea óptima.

162
2.1.4. Método de Pasos Secuenciales
2.1 Modelo de Transporte Fundamento Este método comienza con una solución inicial factible. En cada paso se intenta enviar artículos por una ruta que no se haya usado en la solución factible actual, en tanto se elimina una ruta usada actualmente. En cada cambio de ruta debe cumplirse que: 1. La solución siga siendo factible y 2. Que mejore el valor de la función objetivo El procedimiento termina cuando no hay cambio de rutas que mejoren el valor de la función.

163
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Algoritmo Usar la solución actual (MEN, MAV o MCM) para crear una trayectoria única del paso secuencial. Usar estas trayectorias para calcular el costo marginal de introducir a la solución cada ruta no usada. Si todos los costos marginales son iguales o mayores que cero, terminar; se tendrá la solución óptima. Si no, elegir la celda que tenga el costo marginal más negativo (empates se resuelven arbitrariamente) Usando la trayectoria del paso secuencial, determine el máximo número de artículos que se pueden asignar a la ruta elegida en el punto 2 y ajustar la distribución adecuadamente. Regrese al paso 1 1 2 3 4
 para crear una trayectoria única del paso secuencial. Usar estas trayectorias para calcular el costo marginal de introducir a la solución cada ruta no usada. Si todos los costos marginales son iguales o mayores que cero, terminar; se tendrá la solución óptima. Si no, elegir la celda que tenga el costo marginal más negativo (empates se resuelven arbitrariamente) Usando la trayectoria del paso secuencial, determine el máximo número de artículos que se pueden asignar a la ruta elegida en el punto 2 y ajustar la distribución adecuadamente. Regrese al paso")
164
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 1 Algoritmo a) Ponga un signo + en la celda de interés no ocupada b) Ponga un signo - en una celda usada de la misma fila c) Ponga un + en una celda usada de la misma columna El proceso continúa alternando los signos + y - tanto en las filas como en las columnas hasta que se obtenga una sucesión de celdas (trayectoria) que satisfagan dos condiciones 1. Hay un signo + en la celda desocupada original de interés, y 2. Cualquier fila o columna que tenga un signo + debe tener también un signo - y viceversa.
 Ponga un signo + en la celda de interés no ocupada. b) Ponga un signo - en una celda usada de la misma fila. c) Ponga un + en una celda usada de la misma columna. El proceso continúa alternando los signos + y - tanto en las filas como en las columnas hasta que se obtenga una sucesión de celdas (trayectoria) que satisfagan dos condiciones. 1. Hay un signo + en la celda desocupada original de interés, y. 2. Cualquier fila o columna que tenga un signo + debe tener. también un signo - y viceversa.")
165
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 1 Algoritmo Solución básica factible obtenida aplicando el método de la Esquina Noroeste

166
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 1 Algoritmo Trayectoria 1: +C13-C12+C32-C33

167
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 1 Algoritmo Costos de las Trayectorias 1: +(4)-(13)+(9)-(12)= : +(6)-(13)+(9)-(4) = -2 3: +(6)-(4)+(13)-(12)= : +(10)-(4)+(9)-(12) = 3 5: +(11)-(4)+(9)-(4) = : +(10)-(9)+(13)-(12)= 2
-(13)+(9)-(12)= -12 2: +(6)-(13)+(9)-(4) = -2. 3: +(6)-(4)+(13)-(12)= 3 4: +(10)-(4)+(9)-(12) = 3. 5: +(11)-(4)+(9)-(4) = 12 6: +(10)-(9)+(13)-(12)= 2.")
168
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 2 Algoritmo 1: +(4)-(13)+(9)-(12)= : +(6)-(13)+(9)-(4) = -2 3: +(6)-(4)+(13)-(12)= : +(10)-(4)+(9)-(12) = 3 5: +(11)-(4)+(9)-(4) = : +(10)-(9)+(13)-(12)= 2 La solución factible NO es óptima !! Se selecciona la trayectoria 1 (costo marginal más negativo)
-(13)+(9)-(12)= -12 2: +(6)-(13)+(9)-(4) = -2. 3: +(6)-(4)+(13)-(12)= 3 4: +(10)-(4)+(9)-(12) = 3. 5: +(11)-(4)+(9)-(4) = 2 6: +(10)-(9)+(13)-(12)= 2. La solución factible NO es óptima !! Se selecciona la trayectoria 1 (costo marginal más negativo)")
169
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 3 (Generación de la nueva tabla) Algoritmo ¿Cuántas unidades se pueden asignar a la ruta elegida?
 Algoritmo. ¿Cuántas unidades se pueden asignar a la ruta elegida")
170
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 3 (Generación de la nueva tabla) Algoritmo Costo: $13.000
 Algoritmo. Costo: $")
171
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 4 Algoritmo Volver al Paso 1: Para cada trayectoria evaluar costo marginal

172
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Algoritmo Paso 2: Elección de CMg menor La celda más negativa es c 31 (-10) y la trayectoria es: C31 – C33 + C13 – C11
 y la trayectoria es: C31 – C33 + C13 – C11.")
173
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Algoritmo Paso 3 (Generación de la nueva tabla) ¿Cuántas unidades se pueden asignar a la ruta elegida?
 ¿Cuántas unidades se pueden asignar a la ruta elegida")
174
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 3 (Generación de la nueva tabla) Algoritmo Costo: $12.000
 Algoritmo. Costo: $")
175
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Paso 4 Algoritmo Volver al Paso 1: Para cada trayectoria evaluar costo marginal

176
2.1.4. Método de pasos secuenciales (cont..)
2.1 Modelo de Transporte Algoritmo Paso 2: Determinar costos marginales Todas rutas son no negativas (positivas o cero) Solución factible óptima!!! $12.000 Compare esta solución con la obtenida con MAV y MCM ¿ ...?
 Solución factible óptima!!! $ Compare esta solución con la obtenida con MAV y MCM ¿ ...")
177
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Algoritmo 1. Usar la solución actual (NE, MAV o MCM) y las siguientes operaciones (a) y (b) para determinar el costo marginal de enviar material para cada una de las rutas no usadas. Asociar a cada fila un índice ui y a cada columna un índice vj a) Hacer u1 = 0. Encuéntrese los índices de las filas u2, ..., um y los índices de las columnas v1, ...., vn tales que cij = ui + vj para cada celda usada. b) Sea eij = cij - (ui+vj) para cada celda no usada; eij será el costo marginal de introducir la celda (ruta) i, j a la solución. Los pasos 2 a 4 son los mismos que en el método secuencial.
 y las siguientes operaciones (a) y (b) para determinar el costo marginal de enviar material para cada una de las rutas no usadas. Asociar a cada fila un índice ui y a cada columna un índice vj. a) Hacer u1 = 0. Encuéntrese los índices de las filas u2, ..., um y los índices de las columnas v1, ...., vn tales que cij = ui + vj para cada celda usada. b) Sea eij = cij - (ui+vj) para cada celda no usada; eij será el costo marginal de introducir la celda (ruta) i, j a la solución. Los pasos 2 a 4 son los mismos que en el método secuencial.")
178
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Método de Distribución Modificada (DIMO) Aplicar el algoritmo al problema en estudio y comparar resultados obtenidos con los métodos anteriores Comentar resultados ¿Qué explica que existan dos soluciones óptimas factibles?
 Aplicar el algoritmo al problema en estudio y comparar resultados obtenidos con los métodos anteriores. Comentar resultados. ¿Qué explica que existan dos soluciones óptimas factibles")
179
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Aplicación vj ui Paso 0: Asociar índices

180
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso1.a) Solucionar la ecuación Existen 6 ecuaciones y siete variables entonces se hace u1 = 0 (puede ser cualquiera) y se determina el resto de los índices v1 = v2 = u2 = u3 = v3 = 16 v4 = 8 Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)
 Solucionar la ecuación. Existen 6 ecuaciones y siete variables entonces se hace u1 = 0 (puede ser cualquiera) y se determina el resto de los índices. v1 = 12 v2 = 13 u2 = - 9 u3 = -4 v3 = 16 v4 = 8. Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)")
181
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Costos marginales para las celdas no usadas. eij = cij - (ui + vj) 1) e13 = c13 - (u1 + v3)= 4 - (0 + 16) = -12 2) e14 = c14 - (u1 + v4)= 6 - (0 + 8) = -2 3) e21 = c21 - (u2 + v1)= 6 - ( ) = 2 4) e23 = c23 - (u2 + v3)= 10 - ( ) = 3 5) e24 = c24 - (u2 + v4)= 11 - (-9 + 8) = 12 6) e31 = c31 - (u3 + v1)= 10 - ( ) = 2
 1) e13 = c13 - (u1 + v3)= 4 - (0 + 16) = ) e14 = c14 - (u1 + v4)= 6 - (0 + 8) = -2. 3) e21 = c21 - (u2 + v1)= 6 - ( ) = 2. 4) e23 = c23 - (u2 + v3)= 10 - ( ) = 3. 5) e24 = c24 - (u2 + v4)= 11 - (-9 + 8) = 12. 6) e31 = c31 - (u3 + v1)= 10 - ( ) = 2.")
182
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso 2: Prueba de Optimalidad. Hay costos negativos por lo tanto no es óptima La ruta de reasignación es: +C13 -C33 +C32 -C12 (más negativo, -12)
")
183
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso 3: Asignación de unidades a la ruta elegida. Unidades disponibles a mover: Disminuir 1 unidad C Disminuir 1 unidad C33 200

184
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Vuelta al Paso 1: Paso1.a) Solucionar la ecuación Se hacer u1 = 0 y se determina el resto de los índices v1 = v2 = 1 v3 = 4 v4 = -4 u2 = 3 u3 = 8 Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)
 Solucionar la ecuación. Se hacer u1 = 0 y se determina el resto de los índices. v1 = 12 v2 = 1 v3 = 4 v4 = -4 u2 = 3 u3 = 8. Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)")
185
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Costos marginales para las celdas no usadas. eij = cij - (ui + vj) 1) e12 = c12 - (u1 + v2)= 13 - (0 + 1) = 12 2) e14 = c14 - (u1 + v4)= 6 - (0 - 4) = 10 3) e21 = c21 - (u2 + v1)= 6 - (3 + 12) = -9 4) e23 = c23 - (u2 + v3)= 10 - (3 + 4) = 3 5) e24 = c24 - (u2 + v4)= 11 - (3 - 4) = 12 6) e31 = c31 - (u3 + v1)= 10 - (8 + 12) = -10
 1) e12 = c12 - (u1 + v2)= 13 - (0 + 1) = 12. 2) e14 = c14 - (u1 + v4)= 6 - (0 - 4) = 10. 3) e21 = c21 - (u2 + v1)= 6 - (3 + 12) = -9. 4) e23 = c23 - (u2 + v3)= 10 - (3 + 4) = 3. 5) e24 = c24 - (u2 + v4)= 11 - (3 - 4) = 12. 6) e31 = c31 - (u3 + v1)= 10 - (8 + 12) = -10.")
186
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso 2: Prueba de Optimalidad. Hay costos negativos por lo tanto no es óptima La ruta de reasignación es: +C31 -C33 +C13 -C11

187
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso 3: Asignación de unidades a la ruta elegida. Unidades disponibles a mover: Disminuir 1 unidad C Disminuir 1 unidad C33 100

188
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Vuelta al Paso 1: Paso1.a) Solucionar la ecuación u1 = 0 y se determina el resto de los índices v1 = v2 = 11 v3 = 4 v4 = 6 u2 = u3 = -2 Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)
 Solucionar la ecuación. u1 = 0 y se determina el resto de los índices. v1 = 12 v2 = 11 v3 = 4 v4 = 6 u2 = - 7 u3 = -2. Paso 1.b) Calcular los costos marginales para cada celda no usada. eij = cij - (ui + vj)")
189
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Costos marginales para las celdas no usadas. eij = cij - (ui + vj) 1) e12 = c12 - (u1 + v2)= 13 - (0 + 11) = 2 2) e14 = c14 - (u1 + v4)= (0 + 6) = 0 3) e21 = c21 - (u2 + v1)= ( ) = 1 4) e23 = c23 - (u2 + v3)= (-7 + 4) = 13 5) e24 = c24 - (u2 + v4)= (-7 + 6) = 12 6) e33 = c33 - (u3 + v3)= (-2 + 4) = 10
 1) e12 = c12 - (u1 + v2)= 13 - (0 + 11) = 2. 2) e14 = c14 - (u1 + v4)= 6 - (0 + 6) = 0. 3) e21 = c21 - (u2 + v1)= 6 - ( ) = 1. 4) e23 = c23 - (u2 + v3)= 10 - (-7 + 4) = 13. 5) e24 = c24 - (u2 + v4)= 11 - (-7 + 6) = 12. 6) e33 = c33 - (u3 + v3)= 12 - (-2 + 4) = 10.")
190
2.1.5. Método de Distribución Modificada (DIMO)
2.1 Modelo de Transporte Paso 2: Prueba de Optimalidad. No hay costos negativos por lo tanto es óptima VO = 300*12+200*4+700*4+100*10+200*9+500*4=$12.000 Ver Transporte RPG Equilibrio

191
2.1.6. Modelo de Transporte: Situaciones Especiales
1. Solución en problemas de maximización de transporte 2. El caso en que la oferta excede a la demanda. 3. Eliminación de rutas inaceptables. 4. Degeneración en problemas de transporte. 5. Propiedades especiales del modelo de transporte

192
2.1.6. Modelo de Transporte: Situaciones Especiales
1. Solución en problemas de maximización de transporte. Se utilizan los beneficios marginales en lugar de los costos. Se asignará unidades a la celda que tenga el mayor valor marginal y el procedimiento concluirá cuando todas las rutas tengan valores marginales negativos. b) Convertir la tabla de beneficios en una tabla de costo: Se busca el beneficio mayor, en cada celda se le resta al mayor el beneficio de la celda. Ejemplo:
 Convertir la tabla de beneficios en una tabla de costo: Se busca el beneficio mayor, en cada celda se le resta al mayor el beneficio de la celda. Ejemplo:")
193
2.1.6. Modelo de Transporte: Situaciones Especiales
Tabla de beneficios Mayor = 20 Tabla de costo

194
2.1.6. Modelo de Transporte: Situaciones Especiales
2. El caso en que la oferta excede a la demanda. Se utiliza un destino ficticio en la tabla de transporte. Se considera como nulo el costo de enviar una unidad a dicho destino desde cada una de las fuentes (orígenes). Si la demanda es mayor que la oferta el problema no tiene solución factible, sin embargo el administrador podría abastecer toda la demanda que sea posible a un costo mínimo. Se utiliza un origen ficticio. El costo de abastecer cualquier destino desde dicho origen será cero. Sin embargo podría haber un cargo por orden no cubierta. Ver Transporte RPG (O>D) y (O<D
. Si la demanda es mayor que la oferta el problema no tiene solución factible, sin embargo el administrador podría abastecer toda la demanda que sea posible a un costo mínimo. Se utiliza un origen ficticio. El costo de abastecer cualquier destino desde dicho origen será cero. Sin embargo podría haber un cargo por orden no cubierta. Ver Transporte RPG (O>D) y (O<D.")
195
2.1.6. Modelo de Transporte: Situaciones Especiales
3. Eliminación de rutas inaceptables. Se asocia a una ruta no aceptable un costo lo suficientemente alto para que no sea atrayente la ruta en cuestión. El costo M Por ejemplo: producir en abril para vender en febrero del mismo año. 4. Degeneración en problemas de transporte. Se dice que un problema se degenera cuando hay menos de m + n - 1 rutas ocupadas. Esto puede ocurrir cuando simultáneamente se satisface una demanda y se agota una oferta. Ver Transporte RPG (inaceptable)
")
196
2.1.6. Modelo de Transporte: Situaciones Especiales
5. Propiedades especiales del modelo de transporte Todo problema de transporte es posible resolverlo mediante algoritmos que usan sólo la adición y la sustracción. Si todas las ofertas y demandas tienen valores enteros en un problema de transporte, los valores óptimos de las variables de decisión serán también enteros.

197
2.1 Modelo de Transporte Ejercicios 1 Suponer que se tienen tres fábricas M1, M2 y M3 que producen 39, 48 y 33 toneladas respectivamente, de un cierto producto que debe llevarse a cuatro destinos, D1, D2, D3 y D4, los cuales requieren 40, 37, 18 y 25 toneladas. Los costos están dados por la siguiente tabla: D1 D2 D3 D4 M1 2 3 1 M2 4 7 6 M3 8 9 5

198
Planificación de la producción:
2.1 Modelo de Transporte 2 Planificación de la producción: ¿Cuánto hay que producir en cada periodo para satisfacer la demanda al mínimo costo (tanto de producción como de almacenaje)?. Supuesto: No existe inventario inicial ni final. Plantear el problema usando el modelo de transporte. Encuentre las respuestas usando Solver.
 . Supuesto: No existe inventario inicial ni final. Plantear el problema usando el modelo de transporte. Encuentre las respuestas usando Solver.")
199
2.2 Modelo de Asignación Situación:
Asignar m trabajos (o trabajadores) a n máquinas. Un trabajo i (=1, 2, 3 ,...,m) cuando se asigna a la máquina j (=1,2,....,n) incurre en un costo cij. El objetivo es asignar los trabajos a las máquinas uno a uno al menor costo. La formulación de este problema puede considerarse como un caso especial del modelo de transporte.
 a n máquinas. Un trabajo i (=1, 2, 3 ,...,m) cuando se asigna a la máquina j (=1,2,....,n) incurre en un costo cij. El objetivo es asignar los trabajos a las máquinas uno a uno al menor costo. La formulación de este problema puede considerarse como un caso especial del modelo de transporte.")
200
Descripción Los trabajos representan las “fuentes” y las máquinas los “destinos” La oferta disponible en cada fuente es 1 como también lo es la demanda en cada destino. cij es el costo de transportar (asignar) el trabajo i a la máquina j El costo puede representar también características de competencia de cada trabajador
 el trabajo i a la máquina j. El costo puede representar también características de competencia de cada trabajador.")
201
Descripción En el caso que un trabajo no deba ser asignado (porque no cumple con los requisitos) a una máquina (actividad) en particular, este costo debe tener un valor alto (M) En el caso de existir desequilibrio, esto es, más trabajos que máquinas o más máquinas que trabajos, hay que equilibrar con máquinas o trabajos figurados (ficticios), logrando de esta forma que m = n
 a una máquina (actividad) en particular, este costo debe tener un valor alto (M) En el caso de existir desequilibrio, esto es, más trabajos que máquinas o más máquinas que trabajos, hay que equilibrar con máquinas o trabajos figurados (ficticios), logrando de esta forma que m = n.")
202
Expresión matemática del modelo
0, si el i-ésimo trabajo no se asigna a la j-ésima máquina 1, si el i-ésimo trabajo se asigna a la j-ésima máquina Xij = Máquina … n 1 2 ….. n C11 C12 ….. C1n C21 C22 C2n Cn1 Cn2 Cnn 1 ….. Trabajo …

203
Por lo tanto el modelo está dado por:
minimizar z = sujeto a i=1,2, ...,n j=1,2,..n xij = 0 ó bien 1

204
Ejemplo: La gerencia general de RPG (ejemplo de transporte) con sede en Bruselas, este año, como parte de su auditoría anual, decidió que cada uno de sus cuatro vicepresidentes visite e inspeccione cada una de sus plantas de ensamblaje durante las primeras dos semanas de junio. Las plantas están ubicadas en Leipzig (Alemania), Nancy (Francia, Lieja (Bélgica) y Tilburgo (Holanda). Para decidir a que vicepresidente enviar a una planta determinada, se asignaron puntos (costos) a cada uno de ellos de acuerdo a su experiencia, habilidades lenguísticas, tiempo que durará la inspección y otros. Estos datos se muestran en la siguiente tabla:
 con sede en Bruselas, este año, como parte de su auditoría anual, decidió que cada uno de sus cuatro vicepresidentes visite e inspeccione cada una de sus plantas de ensamblaje durante las primeras dos semanas de junio. Las plantas están ubicadas en Leipzig (Alemania), Nancy (Francia, Lieja (Bélgica) y Tilburgo (Holanda). Para decidir a que vicepresidente enviar a una planta determinada, se asignaron puntos (costos) a cada uno de ellos de acuerdo a su experiencia, habilidades lenguísticas, tiempo que durará la inspección y otros. Estos datos se muestran en la siguiente tabla:")
205
Ejemplo Plantear el modelo de PL

206
Ejemplo: Modelo de PL MIN Z = 24 X11 + 10 X12 + ... + 14 X43 + 13 X44
sujeto a: a) Oferta X11 + X12 + X13 + X14 = 1 X21 + X22 + X23 + X24 = 1 X31 + X32 + X33 + X34 = 1 X41 + X42 + X43 + X44 = 1 b) Demanda X11 + X21 + X31 + X41 = 1 X12 + X22 + X32 + X42 = 1 X13 + X23 + X33 + X43 = 1 X14 + X24 + X34 + X44 = 1 c) No negatividad Xij >= 0 i=1,...,4, j=1,....,4
 Oferta X11 + X12 + X13 + X14 = 1. X21 + X22 + X23 + X24 = 1. X31 + X32 + X33 + X34 = 1. X41 + X42 + X43 + X44 = 1. b) Demanda X11 + X21 + X31 + X41 = 1. X12 + X22 + X32 + X42 = 1. X13 + X23 + X33 + X43 = 1. X14 + X24 + X34 + X44 = 1. c) No negatividad Xij >= 0 i=1,...,4, j=1,....,4.")
207
Métodos de Solución Existen varias formas de obtener la solución:
a) Listar todas las alternativas posibles con sus costos y seleccionar la de menor costo (algoritmo exhaustivo) b) Método Húngaro: método iterativo a) Listar todas las alternativas: ¿Cuántas alternativas posibles existen? - El primer trabajo se puede asignar de n formas formas posibles - El segundo de n-1 formas - El último sólo de 1 forma En total existen n! formas de hacer la asignación completa
 Listar todas las alternativas posibles con sus costos y seleccionar la de menor costo (algoritmo exhaustivo) b) Método Húngaro: método iterativo. a) Listar todas las alternativas: ¿Cuántas alternativas posibles existen - El primer trabajo se puede asignar de n formas formas posibles. - El segundo de n-1 formas. - El último sólo de 1 forma. En total existen n! formas de hacer la asignación completa.")
208
Método Húngaro: Paso 0: Construir la matriz de asignación
Para obtener la solución óptima cada nueva matriz de asignación debe satisfacer: Propiedad 1: Todos los números son no negativos Propiedad 2: Cada fila y cada columna tiene al menos una celda con un valor cero Paso 1: a) Reducción de filas: Restar el costo menor de cada fila a la fila correspondiente y/o b) Reducción de columnas: Restar el costo menor de cada columna a la columna correspondiente Con esto se crea una nueva matriz con las propiedades 1 y 2
 Reducción de filas: Restar el costo menor de cada fila a la fila correspondiente y/o. b) Reducción de columnas: Restar el costo menor de cada columna a la columna correspondiente. Con esto se crea una nueva matriz con las propiedades 1 y 2.")
209
Método Húngaro: Paso 2: Determinar si la matriz es reducida (Prueba de Optimalidad). Trazar el menor número de líneas rectas sobre las filas y columnas para cubrir todos los ceros. Si el número de rectas es igual al número de filas o columnas se dice que esta matriz es reducida. Si la matriz no es reducida pasar al paso 3, sino pasar al paso 4

210
Método Húngaro: Paso 3: Movimiento
De todas las celdas no cruzadas identifique una con el menor valor y haga lo siguiente: a) Restar el valor a cada celda no cruzada b) Sumar el valor a cada celda de intersección de rectas Volver al paso 2
 Restar el valor a cada celda no cruzada. b) Sumar el valor a cada celda de intersección de rectas. Volver al paso 2.")
211
Método Húngaro: Paso 4: Solución óptima (Asignación)
Primero se asigna a las que tengan sólo una alternativa, se van marcando y así sucesivamente Determinar el costo: Se suman todos los costos correspondientes a las asignaciones (o sumar todos los pi y qj). ¿Qué valor se obtiene al sumar todos los valores que se restaron en las reducciones de filas y columnas?
. ¿Qué valor se obtiene al sumar todos los valores que se restaron en las reducciones de filas y columnas")
212
Ejemplo: Aplique el método Húngaro al ejemplo
Paso 0: Matriz de Asignación Nota: En negrita los menores de cada fila

213
Paso 1: Reducción de filas y columnas

214
Paso 2: Determinar si la matriz es reducida
No es reducida: sólo tres rectas (para ser reducida deben ser 4) Ir al paso 3
 Ir al paso 3.")
215
Paso 3: Movimiento (Seleccionar el menor: restar a las no tachadas, sumar a las intersecciones)
Volver al paso 2 !!

216
Iteración paso 2: Se tachan todos los ceros con cuatro rectas, por tanto es óptima Ir al paso 4 !!

217
Paso 4: Asignación Costo = c12 + c23 + c31 +c44 = 10+10+15+13 = 48
= = 48 Ver Asignación RPG

218
Modelo de Asignación: Otras consideraciones
El modelo de asignación de RPG es un modelo de minimización en el cual el número de vicepresidentes es igual al número de plantas, y todas las asignaciones posibles son aceptables. Consideremos ahora modelos tipo asignación donde no todas las condiciones anteriores se cumplen. En particular se considerarán situaciones en las que: Hay una desigualdad entre el número de “personas” por asignar y el número de “destinos” que requieren personas asignadas. Hay un modelo de maximización Existen asignaciones inaceptables

219
Modelo de Asignación: Otras consideraciones
1. Ofertas y demandas desiguales a) Oferta mayor que la demanda Suponer que el presidente de RPG quiere auditar a la planta de Tilburgo, por tanto tendrá que decidir cual de los cuatro vicepresidentes debe asignar a cada una de las tres plantas restantes. Solución: Se elimina la restricción que requería un vicepresidente para Tilburgo. El resultado de este cambio es que la holgura para uno de los cuatro vicepresidentes será 1 en la nueva solución óptima Ver Asignación RPG (O>D)
 Oferta mayor que la demanda. Suponer que el presidente de RPG quiere auditar a la planta de Tilburgo, por tanto tendrá que decidir cual de los cuatro vicepresidentes debe asignar a cada una de las tres plantas restantes. Solución: Se elimina la restricción que requería un vicepresidente para Tilburgo. El resultado de este cambio es que la holgura para uno de los cuatro vicepresidentes será 1 en la nueva solución óptima. Ver Asignación RPG (O>D)")
220
Modelo de Asignación: Otras consideraciones
1. Ofertas y demandas desiguales b) Demanda mayor que la oferta Suponer que el vicepresidente de Personal tiene que viajar a Illinois durante la primer semana de junio, por lo tanto no puede participar en la auditoría en Europa. Solución: Se agrega un vicepresidente ficticio (igual al modelo de transporte) para obtener una solución factible, pero es claro que una de las plantas quedará sin auditar.
 Demanda mayor que la oferta. Suponer que el vicepresidente de Personal tiene que viajar a Illinois durante la primer semana de junio, por lo tanto no puede participar en la auditoría en Europa. Solución: Se agrega un vicepresidente ficticio (igual al modelo de transporte) para obtener una solución factible, pero es claro que una de las plantas quedará sin auditar.")
221
Modelo de Asignación: Otras consideraciones
2. Hay un modelo de maximización La respuesta de asignación es un beneficio y no un costo Ejemplo: Suponga que RPG tiene que asignar vendedores a sus territorios de venta. Existen cuatro personas bien capacitadas listas para ser asignadas y tres territorios requieren un nuevo vendedor. Uno de los vendedores no será asignado. En este caso la asignación de un vendedor cualquiera a un territorio se mide por el incremento marginal esperado en la contribución de dicha asignación a las ganancias.

222
Modelo de Asignación: Otras consideraciones
2. Hay un modelo de maximización La matriz de ganancia es la siguiente Ver Asignación Vendedores RPG

223
Modelo de Asignación: Otras consideraciones
3. Situaciones con asignaciones inaceptables Ejemplo: Suponga que el presidente de RPG no tiene el menor deseo de que el vicepresidente de Operaciones realice una auditoría a la Planta Nancy. Solución: Asignar un costo arbitrariamente alto a esta “ruta”, de tal modo que al restar de él cualquier número finito se obtiene siempre un valor mayor que otros números relevantes Ver Asignación RPG inaceptable

224
2.3 Modelo de Transbordo Este modelo permite que las unidades no vayan directamente desde un origen a un destino, sino que pasen por nodos intermedios o transitorios. Cada origen, punto intermedio y destino final se representan como nodos y se conectan a través de arcos dirigidos Restricción en cada nodo transitorio: suma flujos entrantes = suma flujos saliente También se puede representar por medio de una matriz donde un mij = 1 cuando existe un enlace directo entre el nodo i y el nodo j; y mij = 0 cuando no hay enlace directo entre estos nodos

225
Modelo de Transbordo: Algoritmo
1 2 3 Inicialización: Encuentre un plan de embarque factible que satisfaga todas las restricciones de suministro y demanda, al mismo tiempo que mantiene un equilibrio en todos los nodos de transbordo. Prueba de Optimalidad: Pruebe el plan de embarque actual para ver si es óptimo, es decir, si es el plan que incurre en los costos totales mínimos. Si es así, deténgase con la solución óptima, sino vaya al paso 3. Movimientos: Use el hecho de que el plan de embarque actual no es óptimo para crear un nuevo plan de embarque factible con menos costo total que el actual. Vaya al paso 2.

226
Consideraciones: Los pasos del algoritmo son análogos a los del algoritmo de pasos sucesivos (escalón). Tanto los nodos origen como los destinos pueden ser a su vez nodos de transbordo. Al igual que el modelo de transporte, puede haber desequilibrio, en ese caso se agregan fuentes o destinos ficticios con costo cero. El numero total del sistema está dado por el total de la oferta o de la demanda. A cada nodo de transbordo se asigna un suministro (demanda) igual a su suministro (demanda) original (cero, si no coincide originalmente con un destino) más el total de unidades del sistema. Esto permite que todas las unidades puedan pasar por un empalme dado.
 igual a su suministro (demanda) original (cero, si no coincide originalmente con un destino) más el total de unidades del sistema. Esto permite que todas las unidades puedan pasar por un empalme dado.")
227
Ejemplo 1: Determínese un programa de embarque que cubra todas las demandas a un costo mínimo total para los datos correspondientes al siguiente grafo (costo en $). 8 +15 3 4 1 3 5 +95 4 -30 2 3 7 2 4 2 6 -30 +70 -45
")
228
Solución Los sitios 1 y 2 son orígenes Los sitios 5 y 6 son destinos
El sitio 3 es origen y empalme El sitio 4 es destino y empalme La oferta es mayor que la demanda por tanto se requiere un destino ficticio que demande 75 unidades Agregar 180 unidades a cada empalme (oferta y demanda) El costo de las unidades que van de un empalme (como origen) a él mismo (como destino) y de cualquier origen al sitio ficticio es cero. A las rutas no permitidas se les asocia un valor relativamente alto (por 1.000)
 El costo de las unidades que van de un empalme (como origen) a él mismo (como destino) y de cualquier origen al sitio ficticio es cero. A las rutas no permitidas se les asocia un valor relativamente alto (por 1.000)")
229
La tabla inicial es:

230
La tabla final es: Costo = 20*3+75*0+70*2+90*0+30*3+30*4+45*4+180*0=$590

231
Ejemplo 2: Una corporación necesita transportar 70 unidades de un producto, del sitio 1 a los sitios 2 y 3 en cantidades de 45 y 25 unidades, respectivamente. Las tarifas cij (en miles de pesos por unidad) de carga aérea entre los sitios comunicados por carguero se dan en la tabla, en la cual las líneas punteadas indica que no hay servicio disponible. Determínese un programa de embarque que asigne el número requerido de artículos a cada destino, a un costo mínimo de transporte. Ningún embarque requiere de vuelo directo, se permiten los envíos empleando puntos intermedios. 1 2 3 4 .... 38 56 34 ... 27 19
 de carga aérea entre los sitios comunicados por carguero se dan en la tabla, en la cual las líneas punteadas indica que no hay servicio disponible. Determínese un programa de embarque que asigne el número requerido de artículos a cada destino, a un costo mínimo de transporte. Ningún embarque requiere de vuelo directo, se permiten los envíos empleando puntos intermedios")
232
Ejemplo 3: 8 120 Nodos de transbordo 7 100 1 2 8 6 80 4 9 6 4 6 8 200
5 10 70 4 7 5 4 150 3 6 5 11 110
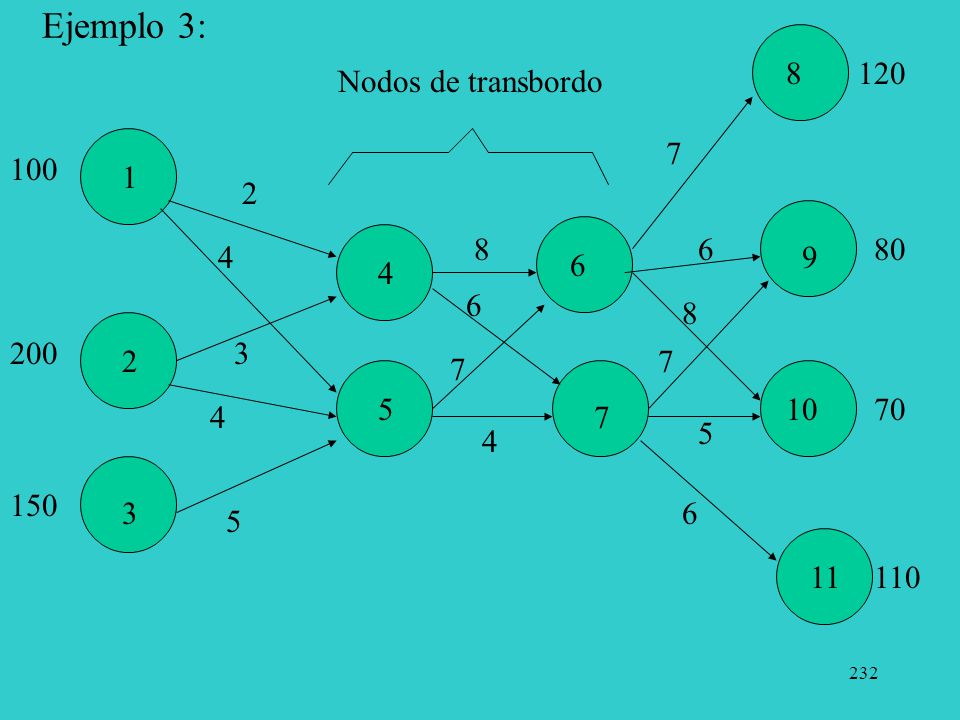
233
Planteamiento del modelo PL :
Plantear el modelo de PL para el ejemplo mostrado en el grafo anterior.

234
2.4. Modelos de Redes 2.4.1 Teoría de Grafos
2.4.2 Modelo de la Ruta más corta 2.4.3 Modelo del Árbol Expandido Mínimo 2.4.4 Problema del Flujo Máximo

235
2.4.1 Introducción a la Teoría de Grafos
Grafo no dirigido: Un grafo no dirigido G consiste en un conjunto V de vértices (o nodos) y un conjunto E de lados (ramas o enlaces) tales que cada lado e ε E está asociado a un par no ordenado de vértices v y w. Si un lado e está asociado a un único par de vértices v y w, entonces e= (v,w) o e=(w,v). Grafo dirigido: Un grafo dirigido (o digrafo) G consiste en un conjunto V de vértices (o nodos) y un conjunto E de lados (o ramas) tales que cada lado e ε E está asociado a un par ordenado de vértices. Si un lado e está asociado a un par ordenado único de vértices v y w, se escribe e = (v,w).
 y un conjunto E de lados (ramas o enlaces) tales que cada lado e ε E está asociado a un par no ordenado de vértices v y w. Si un lado e está asociado a un único par de vértices v y w, entonces e= (v,w) o e=(w,v). Grafo dirigido: Un grafo dirigido (o digrafo) G consiste en un conjunto V de vértices (o nodos) y un conjunto E de lados (o ramas) tales que cada lado e ε E está asociado a un par ordenado de vértices. Si un lado e está asociado a un par ordenado único de vértices v y w, se escribe e = (v,w).")
236
2.4.1 Introducción a la Teoría de Grafos
Se dice que un lado e = (v,w) de un grafo (dirigido o no dirigido) es incidente en v y w. Se dice que los vértices v y w son incidentes en e y también son vértices adyacentes. Si G es un grafo (dirigido o no dirigido) con un conjunto de vértices V y un conjunto de lados E, se escribe G = (V,E) Nodo (Vértice): Un círculo de una red utilizada para representar una planta, almacén o tienda. Nodo de Suministro: Nodo desde le cual los productos se van a enviar.
 de un grafo (dirigido o no dirigido) es incidente en v y w. Se dice que los vértices v y w son incidentes en e y también son vértices adyacentes. Si G es un grafo (dirigido o no dirigido) con un conjunto de vértices V y un conjunto de lados E, se escribe G = (V,E) Nodo (Vértice): Un círculo de una red utilizada para representar una planta, almacén o tienda. Nodo de Suministro: Nodo desde le cual los productos se van a enviar.")
237
2.4.1 Introducción a la Teoría de Grafos
Nodo de demanda: Nodo que va a recibir los productos para cumplir con una demanda conocida. Nodo de transbordo: Nodo que recibe productos desde otros nodos para su distribución. Arco (enlace): Línea de una red que conecta un par de nodos. Se le utiliza para representar una ruta válida desde el nodo origen al nodo de distribución.
: Línea de una red que conecta un par de nodos. Se le utiliza para representar una ruta válida desde el nodo origen al nodo de distribución.")
238
2.4.1 Introducción a la Teoría de Grafos
Arco dirigido: Indica el sentido de movimiento de los productos. Camino: Una secuencia de nodos en una red unidos por arcos (dirigidos o no dirigidos) Trayectoria (lazo): Es un camino cerrado (ciclo) donde el primer nodo es a su vez el último.
 Trayectoria (lazo): Es un camino cerrado (ciclo) donde el primer nodo es a su vez el último.")
239
2.4.1 Introducción a la Teoría de Grafos
Representación de un grafo: Un grafo se puede representar matemáticamente como: a) Una matriz b) Una lista enlazada c) Árbol Representación Matricial i) Matriz de Adyacencia ii) Matriz de costo (beneficio)
 Una matriz. b) Una lista enlazada. c) Árbol. Representación Matricial. i) Matriz de Adyacencia. ii) Matriz de costo (beneficio)")
240
2.4.1 Introducción a la Teoría de Grafos (cont.)
Matriz de Adyacencia: Para un grafo G, es una matriz A de dimensión NxN, donde A[i,j] es verdadero (1) si, y sólo si, existe un arco que vaya del vértice i al vértice j. En ausencia de arco directo se representa generalmente por 0. Ejemplo: Dado el siguiente grafo encontrar su matriz de adyacencia
 si, y sólo si, existe un arco que vaya del vértice i al vértice j. En ausencia de arco directo se representa generalmente por 0. Ejemplo: Dado el siguiente grafo encontrar su matriz de adyacencia.")
241
2.4.1 Introducción a la Teoría de Grafos (cont.)
3 4 1 2 3 4
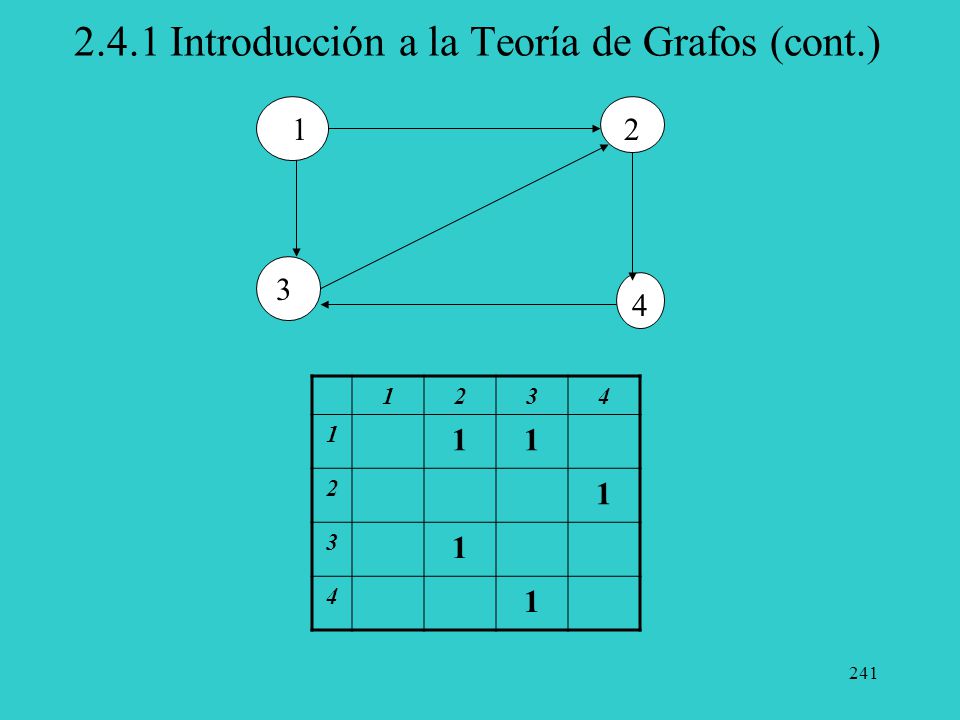
242
2.4.1 Introducción a la Teoría de Grafos (cont.)
Matriz de Costo: Para un grafo G etiquetado, es una matriz C de dimensión NxN, donde A[i,j] es el costo (valor de la etiqueta) si, y sólo si, existe un arco que vaya del vértice i al vértice j. En ausencia de arco directo se representa generalmente por infinito (costo extremadamente alto, para la simulación se hace uso de un valor fuera de contexto). Ejemplo: Dado el siguiente grafo encontrar su matriz de costo
 si, y sólo si, existe un arco que vaya del vértice i al vértice j. En ausencia de arco directo se representa generalmente por infinito (costo extremadamente alto, para la simulación se hace uso de un valor fuera de contexto). Ejemplo: Dado el siguiente grafo encontrar su matriz de costo.")
243
2.4.1 Introducción a la Teoría de Grafos (cont.)
10 2 1 12 15 20 3 5 4 1 2 3 4 10 15 12 20 5
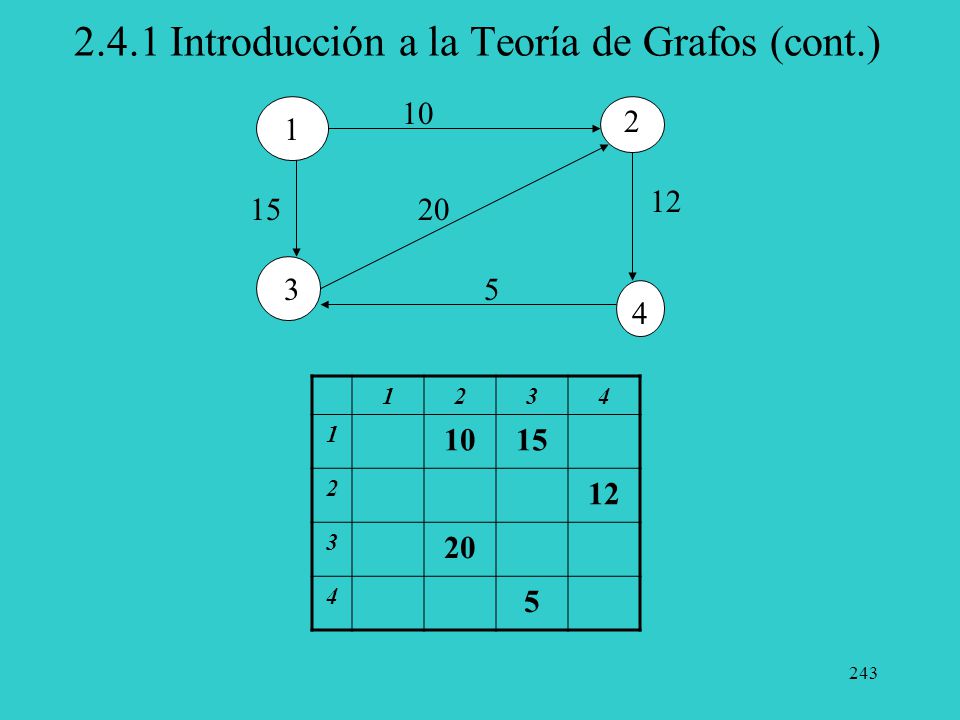
244
2.4.1 Introducción a la Teoría de Grafos (cont.)
Para un grafo no dirigido, tanto la matriz de adyacencia como la matriz de costo son simétricas, esto es: A[i,j] = A[j,i] ó C[i,j] = C[j,i]

245
Ejemplo Introductorio
Seymour Miles es el gerente de distribución de Zigwell. Zigwell distribuye sus motores oruga en cinco estados del medio oeste. Por lo regular, Seymour Miles tiene 10 aparatos E-9 in situ en lo que designaremos como local 1. Estos tractores deben ser enviados a los dos locales de construcción más importantes designados como 3 y 4. Se necesitan tres E-9 en el local 3 y siete en el local 4. Debido a itinerarios arreglados con anterioridad, relativos a la disponibilidad de conductores, los tractores solo pueden ser distribuidos de acuerdo con las rutas alternativas que se muestran en el grafo de la figura. La figura tiene un número +10 en el nodo 1, esto significa que hay 10 aparatos E-9 disponibles (oferta). Los indicadores -3 y -7 asociados a los locales 3 y 4, respectivamente, denotan los requerimientos (demandas) de éstos.
. Los indicadores -3 y -7 asociados a los locales 3 y 4, respectivamente, denotan los requerimientos (demandas) de éstos.")
246
-3 3 c23 c43 u34 u43 c34 u23 +10 -7 c12 c24 1 2 4 u53 c53 u24 u12 c25 c54 c54 u25 5 Rutas alternativas para el destino 3 1-2-3, , ,

247
Los costos cij son unitarios
Los costos cij son unitarios. Por ejemplo el costo de recorrer el arco (5,3) es c53 por cada tractor. Debido a los acuerdos sostenidos con los conductores, Zigwell debe cambiarlos en cada local que se encuentre sobre la ruta. Las limitaciones en la disponibilidad de conductores ocasionan que haya una cota superior en el número de tractores que pueden recorrer cualquier arco dado. Por ejemplo: u53 es la cota superior o capacidad en el arco (5,3). El problema de Sygmour consiste en encontrar un plan de embarque que satisfaga la demanda y las restricciones de capacidad a costo mínimo.
 es c53 por cada tractor. Debido a los acuerdos sostenidos con los conductores, Zigwell debe cambiarlos en cada local que se encuentre sobre la ruta. Las limitaciones en la disponibilidad de conductores ocasionan que haya una cota superior en el número de tractores que pueden recorrer cualquier arco dado. Por ejemplo: u53 es la cota superior o capacidad en el arco (5,3). El problema de Sygmour consiste en encontrar un plan de embarque que satisfaga la demanda y las restricciones de capacidad a costo mínimo.")
248
El problema en particular se conoce como modelo de transbordo con capacidades.
Expresar el problema como un PL a) Variables de decisión xij = número total de E-9 que se enviarán a través del arco (i,j). = flujo del nodo i al nodo j
 Variables de decisión. xij = número total de E-9 que se enviarán a través del arco (i,j). = flujo del nodo i al nodo j.")
249
b) Función Objetivo c) Restricciones s a + X12 = 10
MIN Z =C12X12+C23X23+C24X24+C25X25+C34X34+C43X43+C53X53+C54X54 c) Restricciones s a + X = 10 - X12+X23+X24+X = 0 -X X43 -X53 +X = -3 -X X X34 -X54 = -7 -X X X54 = 0 Balance de flujo
 Restricciones. s a. + X12 = X12+X23+X24+X25 = 0. -X23 -X43 -X53 +X34 = -3. -X24 +X43 -X34 -X54 = -7. -X25 +X53 +X54 = 0. Balance. de. flujo.")
250
Matriz Incidencia nodo-arco
(1,2) (2,3) (2,4) (2,5) (4,3) (5,3) (3,4) (5,4) LD 1 +1 10 2 -1 3 -3 4 -7 5
 (2,3) (2,4) (2,5) (4,3) (5,3) (3,4) (5,4) LD")
251
Formulación General del Modelo de Transbordo con Capacidades
Xij denotan el flujo del nodo i al nodo j a lo largo del arco que conecta esos nodos. Lj representa la oferta en el nodo j minimice s.a.

252
Resolver para las siguientes capacidades y costos
Ver transbordo con capacidades

253
2.4.2 Modelo de la Ruta más corta
Situaciones: Se pueden dar dos casos para representar la red: Como grafo no dirigido Como grafo dirigido a b Cualquiera que sea el caso corresponde a grafos ponderados (con peso)
")
254
2.4.2 Modelo de la Ruta más corta
a) Algoritmo: Grafo no dirigido Considerénse todos los nodos que estén directamente conectados con el origen. Etiquetarlos con la distancia al origen y su nodo predecesor. Etiquetas temporales, [distancia, nodo]. De entre todos los nodos con etiquetas temporales, escoger el que tenga la distancia menor y se marca como permanente. Si todos están con etiquetas permanentes se va al paso cuatro. 1 2
 Algoritmo: Grafo no dirigido. Considerénse todos los nodos que estén directamente conectados con el origen. Etiquetarlos con la distancia al origen y su nodo predecesor. Etiquetas temporales, [distancia, nodo]. De entre todos los nodos con etiquetas temporales, escoger el que tenga la distancia menor y se marca como permanente. Si todos están con etiquetas permanentes se va al paso cuatro")
255
2.4.2 Modelo de la Ruta más corta (GND)
Algoritmo: Todo nodo que no tenga etiqueta permanente, tendrá etiqueta temporal o estará sin etiqueta. Sea L el último nodo con etiqueta permanente. Considerénse todas las etiquetas de los vecinos de L (directamente conectados a L mediante un arco). Para cada uno de estos nodos calcúlese la suma de su distancia a L. Si el nodo en cuestión no está etiquetado, asígnese una etiqueta temporal que conste de esta distancia y de L como predecesor. Si el nodo en cuestión ya tiene etiqueta temporal, cámbiese sólo si la distancia recién calculada es menor que la componente de distancia de la etiqueta actual. En este caso, la etiqueta contendrá esta distancia y a L como predecesor. Regresar al paso 2 3
. Para cada uno de estos nodos calcúlese la suma de su distancia a L. Si el nodo en cuestión no está etiquetado, asígnese una etiqueta temporal que conste de esta distancia y de L como predecesor. Si el nodo en cuestión ya tiene etiqueta temporal, cámbiese sólo si la distancia recién calculada es menor que la componente de distancia de la etiqueta actual. En este caso, la etiqueta contendrá esta distancia y a L como predecesor. Regresar al paso")
256
2.4.2 Modelo de la Ruta más corta (GND)
Algoritmo: Las etiquetas permanentes indican la distancia más corta entre el nodo origen a cada nodo de la red. También indican el nodo predecesor en la ruta más corta hacia cada nodo. Para encontrar el camino más corto de un nodo dado, comiéncese en él y retroceda al nodo anterior. Continuar con el recorrido hasta llegar al origen. 4

257
2.4.2 Modelo de la Ruta más corta (GND)
Ejemplo: Para el siguiente grafo encontrar la distancia más corta desde el nodo H al resto de los nodos. 7 1 8 2 6 3 H 7 4 1 3 3 4 1 3 1 5 1 2 2 6

258
2.4.2 Modelo de la Ruta más corta (GND)
Solución: (8,H) (9,7) 7 1 8 ó 2 6 3 H 7 (9,4) 4 1 3 (5,1) (6,3) 3 4 1 3 1 5 1 2 2 (4,H) 6 (8,2) (6,3) 1:Ver ejemplo 1 Ruta mas corta 2: Hacer problema 19 guía 2 (Ejemplo 2 Ruta mas corta
 (9,7) ó H. 7. (9,4) (5,1) (6,3) (4,H) 6. (8,2) (6,3) 1:Ver ejemplo 1 Ruta mas corta. 2: Hacer problema 19 guía 2 (Ejemplo 2 Ruta mas corta.")
259
Para su práctica y ejercitación neuronal
10 5 7 8 2 A B 1 F 10 3 1 D 7 4 4 G C 3

260
2.4.2 Modelo de la Ruta más corta (GD)
b) Algoritmo de Dijkstra Es una técnica exhaustiva, esto es, prueba todas las alternativas posibles. Opera a partir de un conjunto S de vértices cuya distancia más corta desde el origen ya es conocida. Inicialmente S contiene sólo el nodo de origen. En cada paso se agrega algún vértice restante v a S, cuya distancia desde el origen es la más corta posible. Para cada paso del algoritmo, se utiliza una matriz D para registrar la longitud del camino más corto a cada vértice.
 Algoritmo de Dijkstra. Es una técnica exhaustiva, esto es, prueba todas las alternativas posibles. Opera a partir de un conjunto S de vértices cuya distancia más corta desde el origen ya es conocida. Inicialmente S contiene sólo el nodo de origen. En cada paso se agrega algún vértice restante v a S, cuya distancia desde el origen es la más corta posible. Para cada paso del algoritmo, se utiliza una matriz D para registrar la longitud del camino más corto a cada vértice.")
261
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
INICIO 0) V = {1, 2, 3, 4, ..., n} 1) S = {1} // nodo 1 se supone que es el origen 2) Para i=2 Hasta n Hacer 3) Di = C1i 4) Para i=1 Hasta n-1 Hacer 5) Elegir un vértice w en V-S tal que Dw sea un mínimo 6) agregar w a S 7) Para cada vértice v en V-S Hacer SI ((Dw+Cwv)<Dv) //Pv = w Dv = Dw+Cwv //Dv=mínimo(Dv,Dw+Cwv) FIN
 V = {1, 2, 3, 4, ..., n} 1) S = {1} // nodo 1 se supone que es el origen. 2) Para i=2 Hasta n Hacer. 3) Di = C1i. 4) Para i=1 Hasta n-1 Hacer. 5) Elegir un vértice w en V-S tal que Dw sea un mínimo. 6) agregar w a S. 7) Para cada vértice v en V-S Hacer. SI ((Dw+Cwv)<Dv) //Pv = w. Dv = Dw+Cwv. //Dv=mínimo(Dv,Dw+Cwv) FIN.")
262
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
Ejemplo: Aplicar el algoritmo al siguiente grafo dirigido 1 100 10 5 30 2 60 10 50 3 4 20

263
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
Inicial 0) V = {1, 2, 3, 4, 5} 1) S = {1} 2) 3) D2 = 10, D3 = inf, D4=30, D5 = 100 4) Iterar 4 veces 5) Seleccionar nodo con distancia más corta de V-S, En el ejemplo es el nodo 2
 V = {1, 2, 3, 4, 5} 1) S = {1} 2) 3) D2 = 10, D3 = inf, D4=30, D5 = ) Iterar 4 veces. 5) Seleccionar nodo con distancia más corta de V-S, En el ejemplo es el nodo 2.")
264
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
6) Agregar el nodo 2 a S : S = {1,2} 7) Iterar |V-S|, (V-S = {3,4,5}) D3=mínimo(D3,D2+C23) =mínimo(inf,10+50) = 60 D4=mínimo(D4,D2+C24) =mínimo(30,10+inf) = 30 D5=mínimo(D5,D2+C25) =mínimo(100,10+inf) = 100
 Agregar el nodo 2 a S : S = {1,2} 7) Iterar |V-S|, (V-S = {3,4,5}) D3=mínimo(D3,D2+C23) =mínimo(inf,10+50) = 60. D4=mínimo(D4,D2+C24) =mínimo(30,10+inf) = 30. D5=mínimo(D5,D2+C25) =mínimo(100,10+inf) = 100.")
265
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
2a Iteración V-S = {3,4,5} 5) w = 4 6) S = {1,2,4} 7) Iterar |V-S| V-S = {3,5} D3=mínimo(D3,D4+C43) =mínimo(60,30+20) = 50 D5=mínimo(D5,D4+C45) =mínimo(100,30+60) = 90
 w = 4. 6) S = {1,2,4} 7) Iterar |V-S| V-S = {3,5} D3=mínimo(D3,D4+C43) =mínimo(60,30+20) = 50. D5=mínimo(D5,D4+C45) =mínimo(100,30+60) = 90.")
266
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
3a Iteración V-S = {3,5} 5) w = 3 6) S = {1,2,4,3} 7) Iterar |V-S| (V-S = {5}) D5=mínimo(D5,D3+C35) =mínimo(90,50+10) = 60
 w = 3. 6) S = {1,2,4,3} 7) Iterar |V-S| (V-S = {5}) D5=mínimo(D5,D3+C35) =mínimo(90,50+10) = 60.")
267
2.4.2 Modelo de la Ruta más corta (GD) Algoritmo de Dijkstra
4a Iteración V-S = {5} 5) w = 5 6) S = {1,2,4,3,5} 7) Iterar |V-S| (V-S = {}) Tabla Final
 w = 5. 6) S = {1,2,4,3,5} 7) Iterar |V-S| (V-S = {}) Tabla Final.")
268
¿Cuál es el camino? Para conocer el camino hay que incluir otra matriz P de vértices, tal que Pv contenga el vértice inmediato anterior a v en el camino más corto. Se asigna a Pv valor inicial 1 para todo v 1 La matriz P se actualiza después de la línea 8. Si Dw + Cwv < Dv en la línea 8, después se hace Pv = w Al término de la corrida del algoritmo, el camino a cada vértice puede encontrarse regresando por los vértices predecesores de la matriz P

269
¿Cuál es el camino? Para el ejemplo, la matriz P debe tener los valores P2 =1, P3 = 4, P4 = 1, P5 = 3 Para encontrar el camino más corto del vértice 1 al 5, se siguen los predecesores en orden inverso. 3 es el predecesor de 5 4 es el predecesor de 3 1 es el predecesor de 4

270
Problema de los caminos más cortos entre todos los pares de nodos
Para visualizar el problema se emplea un grafo dirigido G = (V,A) en el que cada arco v w tiene un costo no negativo Cv,w. El problema consiste en encontrar el camino de longitud más corta (menor costo) entre v y w para cada par ordenado de vértices (v,w). Algoritmo de Floyd Se utiliza una matriz A, donde Aij = Cij para toda i j, si no existe camino directo entre i y j se supone que Cij = inf. Cada elemento de la diagonal se hace cero.
 en el que cada arco v w tiene un costo no negativo Cv,w. El problema consiste en encontrar el camino de longitud más corta (menor costo) entre v y w para cada par ordenado de vértices (v,w). Algoritmo de Floyd. Se utiliza una matriz A, donde Aij = Cij para toda i j, si no existe camino directo entre i y j se supone que Cij = inf. Cada elemento de la diagonal se hace cero.")
271
Problema de los caminos más cortos entre todos los pares de nodos
Después se hacen n iteraciones en la matriz A. Al final de la k-ésima iteración Aij tendrá por valor la longitud más pequeña de cualquier camino que vaya desde el vértice i hasta el vértice j y que no pase por un vértice mayor que k. Esto es, i y j, los vértice extremos del camino, pueden ser cualquier vértice, pero todo vértice intermedio debe ser menor o igual a k. En la k-ésima iteración se aplica la siguiente fórmula para calcular A k-1Aij kAij = min k-1Aik + k-1Akj

272
Problema de los caminos más cortos entre todos los pares de nodos
Para calcular Aij, se compara k-1Aij, el costo de ir de i a j sin pasar por k o cualquier otro nodo con numeración mayor, con k-1Aik + k-1Akj, el costo de ir primero de i a k y después de k a j, sin pasar a través de un vértice mayor que k. Si el paso por el vértice k produce un camino más económico que el de k-1Aij, se elige ese costo para kAij. k k-1Akj k-1Aik j i k-1Aij

273
Problema de los caminos más cortos entre todos los pares de nodos
Algoritmo de Floyd // Se supone que se cuenta con la matriz de costo C 0) INICIO 1) Desde i = 1 Hasta N 2) Desde j = 1 Hasta N 3) Aij Cij 4) Desde i = 1 Has ta N 5) Aii = 0 6) Desde k = 1 Hasta N 7) Desde i = 1 Hasta N 8) Desde j = 1 Hasta N 9) SI (Aik + Akj < Aij) 10) Aij = Aik + Akj 11) FIN
 INICIO. 1) Desde i = 1 Hasta N. 2) Desde j = 1 Hasta N. 3) Aij Cij. 4) Desde i = 1 Has ta N. 5) Aii = 0. 6) Desde k = 1 Hasta N. 7) Desde i = 1 Hasta N. 8) Desde j = 1 Hasta N. 9) SI (Aik + Akj < Aij) 10) Aij = Aik + Akj. 11) FIN.")
274
Problema de los caminos más cortos entre todos los pares de nodos
Recuperación de caminos para el Algoritmo de Floyd Cuando es de interés conocer el camino más corto entre dos vértices, hay que consignarlo en una matriz P, donde Pij tiene el vértice k que permitió a Floyd encontrar el valor menor de Aij. Si Pij es cero, el camino de i a j es directo.

275
Problema de los caminos más cortos entre todos los pares de nodos
Algoritmo de Floyd Modificado 0) INICIO 1) Desde i = 1 Hasta N 2) Desde j = 1 Hasta N 3) Aij Cij 3) Pij 0 4) Desde i = 1 Has ta N 5) Aii = 0 6) Desde k = 1 Hasta N 7) Desde i = 1 Hasta N 8) Desde j = 1 Hasta N 9) SI (Aik + Akj < Aij) 10) Aij Aik + Akj 10) Pij k 11) FIN
 INICIO. 1) Desde i = 1 Hasta N. 2) Desde j = 1 Hasta N. 3) Aij Cij. 3) Pij 0. 4) Desde i = 1 Has ta N. 5) Aii = 0. 6) Desde k = 1 Hasta N. 7) Desde i = 1 Hasta N. 8) Desde j = 1 Hasta N. 9) SI (Aik + Akj < Aij) 10) Aij Aik + Akj. 10) Pij k. 11) FIN.")
276
Problema de los caminos más cortos entre todos los pares de nodos
Ejemplo: Aplique Floyd al grafo ponderado mostrado en la figura 8 2 2 1 2 3 3 5

277
Problema de los caminos más cortos entre todos los pares de nodos
Solución: Tabla Inicial 0Aij

278
Problema de los caminos más cortos entre todos los pares de nodos
Solución: Después de la primera iteración 1Aij

279
Problema de los caminos más cortos entre todos los pares de nodos
Solución: Después de la segunda iteración 2Aij

280
Problema de los caminos más cortos entre todos los pares de nodos
Solución: Después de la tercera iteración 3Aij

281
2.4.3 Modelo de árbol extensión mínima
Definición 1 Un árbol es un grafo que tiene sus n nodos (vértices) conectados (conexo) con n-1 arcos (aristas), no existiendo ciclos (caminos cerrados) Definición 2 Un árbol de expansión de costo mínimo es aquel en que todos los enlaces tienen longitudes (costos) mínimas
 conectados (conexo) con n-1 arcos (aristas), no existiendo ciclos (caminos cerrados) Definición 2. Un árbol de expansión de costo mínimo es aquel en que todos los enlaces tienen longitudes (costos) mínimas.")
282
Algoritmo para el problema del árbol de expansión mínima.
Método Gráfico Se selecciona un nodo cualquiera y se conecta al nodo más cercano a éste. Se identifica el nodo no conectado más cercano a un nodo conectado y se conectan estos dos nodos Empates se deciden en forma arbitraria. Los empates indican que existen soluciones alternativas para la construcción. 1 2 Nota:

283
Ejemplo: Encontrar el AEM para el siguiente grafo
7 1 8 2 6 3 H 7 4 1 3 3 4 1 3 1 5 1 2 2 6

284
Solución : 7 1 2 6 H 4 1 1 3 4 1 5 1 2 2

285
Algoritmo tabular Paso Acción
0 Se construye la tabla de costos de enlaces 1 Se comienza arbitrariamente con cualquier nodo. Se designa a este nodo como conectado y se pone una marca al lado de la fila correspondiente al nodo. Se tacha el índice de la columna que corresponde a él. 2 Considerando todas las filas marcadas, buscar el mínimo en las columnas cuyo índice aún no haya sido tachado encerrándolo en un círculo. Designándose de esta manera el nuevo nodo conectado. Se tacha el índice de la columna y pone una marca en la fila correspondiente a este nodo. Se repite este paso hasta que todos los nodos estén conectados. 3 Los nodos encerrados en círculo identifican el árbol.

286
Aplicación Algoritmo tabular
Tabla inicial

287
Aplicación Algoritmo tabular
Inicio: Nodo H a) b)
 b)")
288
Aplicación Algoritmo tabular
Nodo 1 a) b) c)
 b) c)")
289
Aplicación Algoritmo tabular
Tabla final a) b) c)
 b) c)")
290
Arbol de expansión mínima :
7 1 2 6 H 4 1 1 3 4 1 5 1 2 2

291
2.4.4 Problema del Flujo Máximo
Descripción En este problema hay un solo nodo fuente (nodo de entrada) y un solo nodo destino (nodo de salida), y el resto son nodos de transbordo. El problema consiste en encontrar la máxima cantidad de flujo total (petróleo, gas, efectivo, mensajes, tránsito, etc.) en una unidad de tiempo. La cantidad de flujo por unidad de tiempo en cada arco está limitada por las restricciones de capacidad. Este problema se puede representar como una red dirigida y conexa.
 y un solo nodo destino (nodo de salida), y el resto son nodos de transbordo. El problema consiste en encontrar la máxima cantidad de flujo total (petróleo, gas, efectivo, mensajes, tránsito, etc.) en una unidad de tiempo. La cantidad de flujo por unidad de tiempo en cada arco está limitada por las restricciones de capacidad. Este problema se puede representar como una red dirigida y conexa.")
292
Descripción Para cada nodo interno debe cumplirse que: flujo que sale del nodo = flujo que entra al nodo En términos formales, siendo 1 la fuente y n el destino el problema consiste en: MAX f f si i = 1 sujeto a si i = n 0 en otro caso 0 xij uij, para todos (i,j) de la red xij : flujo por unidad de tiempo por el arco (i,j) uij : capacidad del arco (i,j) f : flujo total a través de la red
 de la red. xij : flujo por unidad de tiempo por el arco (i,j) uij : capacidad del arco (i,j) f : flujo total a través de la red.")
293
Descripción Considérese la i-ésima restricción, para algún valor fijo de i, La suma se considera sobre toda j para la cual el arco (i,j) con i fijo, pertenezca a la red. Entonces, será el flujo total que sale del nodo i. En forma semejante, la suma se considera sobre toda j para la cual exista el arco (j,i) en la red, (i fijo). De modo que es el flujo que entra al nodo i
 con i fijo, pertenezca a la red. Entonces, será el flujo total que sale del nodo i. En forma semejante, la suma se considera sobre toda j para la cual exista el arco (j,i) en la red, (i fijo). De modo que es el flujo que entra al nodo i.")
294
Algoritmo Antes de hacer la presentación formal del algoritmo, revisemos el siguiente ejemplo. 6 2 4 6 4 2 6 1 1 3 6 2 5 3 4
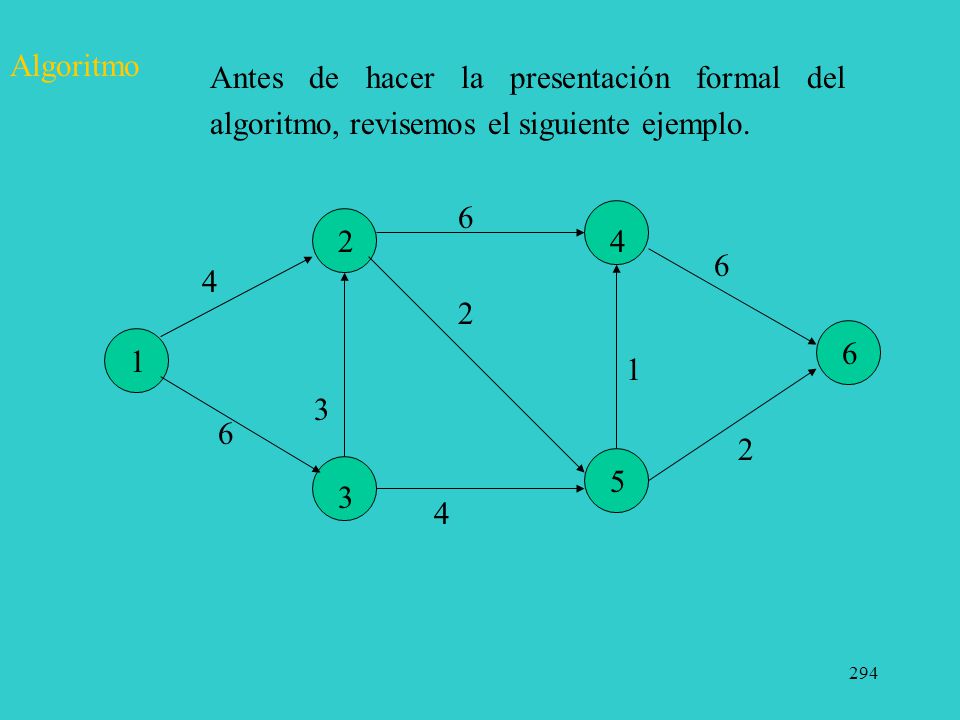
295
Algoritmo Grafo inicial: Inicialización delos flujos en cada nodo 6 4 2 6 2 4 6 1 3 1 6 2 5 3 4 Consideremos un camino desde el nodo 1 al nodo 6 Ejemplo:

296
Se dice que la cantidad de flujo a lo largo de dicho recorrido es factible si:
1 2 No excede la capacidad de ningún arco del camino Con excepción de los nodos 1 y 6, el flujo en cada nodo debe satisfacer la condición de conservación La cantidad máxima que puede fluir desde la fuente a lo largo de un camino es igual a la menor de las capacidades de los arcos de dicho camino Al asignar un flujo a un arco nos atendremos a las reglas: 1 2 Se reduce la capacidad en la dirección del flujo (cantidad de flujo) Se aumenta la capacidad en sentido opuesto (cantidad de flujo)
 Se aumenta la capacidad en sentido opuesto (cantidad de flujo)")
297
Ejemplo: Considerar el arco 1-2
4 1 2 Asignar dos unidades a este arco: Aplicando las reglas 1 y 2 se tiene 2 2 1 2 ( ) Se generó una capacidad ficticia en la dirección 2-1 Enviar una unidad de 2 a 1 3 1 1 2 ( )
 Se generó una capacidad ficticia en la dirección 2-1. Enviar una unidad de 2 a (1 )")
298
Algoritmo Inicial 1 2 3 Inicializar cada nodo del grafo con capacidades uij en la dirección del flujo y cero en la dirección opuesta. Encontrar cualquier camino de la fuente a destino que tenga capacidad de flujo positiva, si no los hay, se habrá encontrado la solución óptima. Sea cmin la capacidad mínima de flujo entre los arcos seleccionados en el paso 1, se aumenta el flujo existente a través de la red al enviar un flujo adicional cmin para todos los arcos del camino. Para todos los arcos del camino, disminúyanse las capacidades en la dirección del flujo y auméntese las capacidades en la dirección opuesta en cmin. Volver al paso 1

299
Aplicar el algoritmo al grafo del ejemplo:
Paso Inicial 6 4 2 6 2 4 6 1 3 1 6 2 5 3 4

300
Iteración 1: Elegir arbitrariamente el camino 1-3-5-6
cmin = MIN(6,4,2)=2; actualizando la red se tiene 6 4 2 6 2 4 2 2 6 1 3 1 6 2 4 2 5 3 2 4 2 2
=2; actualizando la red se tiene")
301
Iteración 2: Elegir arbitrariamente el camino 1-2-4-6
cmin = MIN(4,6,6)=4; actualizando la red se tiene 4 2 4 2 6 4 2 6 4 2 6 6 4 2 2 6 1 3 1 6 2 4 2 5 3 2 4 2 2
=4; actualizando la red se tiene")
302
Iteración 3: Elegir arbitrariamente el camino 1-3-2-4-6
cmin = MIN(4,3,2,2)=2; actualizando la red se tiene 6 4 2 4 2 6 4 2 6 6 8 4 8 2 6 6 2 4 2 2 6 1 1 3 1 6 2 4 2 2 5 3 2 4 4 2 2
=2; actualizando la red se tiene")
303
Cálculo de la cantidad de flujo en cada arco
Se determina comparando la capacidad inicial de cada arco con la capacidad inicial. Para cada arco la regla es: Si la capacidad final es menor que la capacidad inicial, calcular la diferencia. Esta es la cantidad del flujo a través del arco. Ejemplo: Arco 3-5 Inicial Final 3 5 4 3 5 2 2 Final < inicial entonces el flujo es 4-2=2

304
Aplicando la regla anterior a todos los arcos se tiene el siguiente grafo:
6 2 4 6 4 8 8 6 1 2 4 2 5 3 2
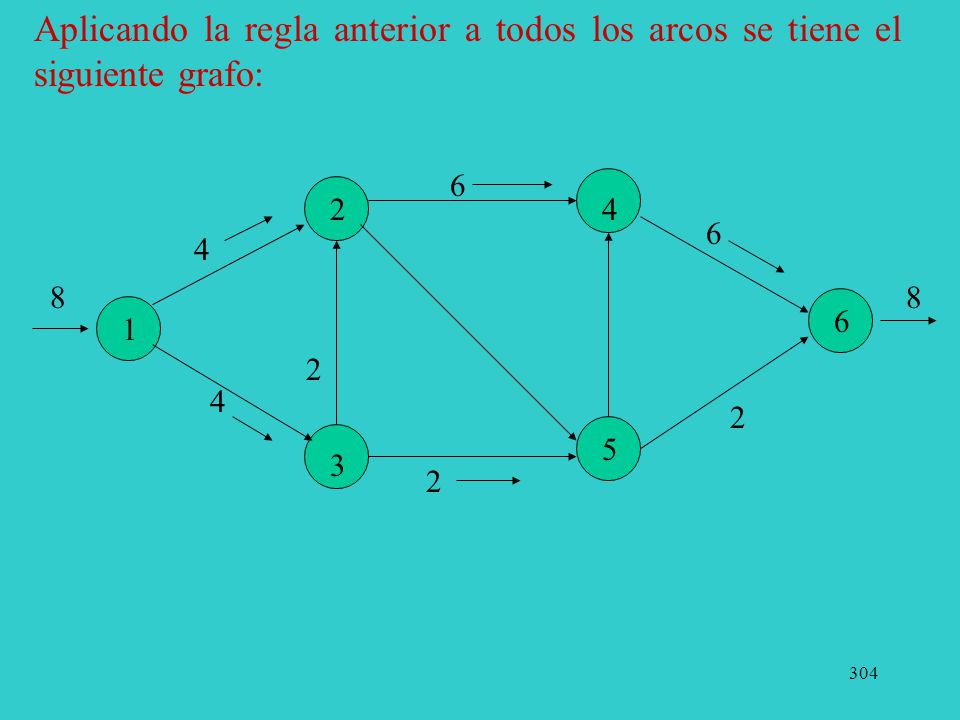
305
Unidad 3 Administración de Proyectos PERT y CPM

306
3 Administración de Proyectos (PERT y CPM)
Todo proyecto debe ser comprobado y controlado, dado que éste tiene involucrado numerosas tareas interrelacionadas. A través de algunas técnicas se puede responder a preguntas como: 1. ¿Cuándo sería lo más pronto que el proyecto pudiera estar terminado? 2. Para cumplir con este tiempo de conclusión, ¿qué tareas son críticas, en el sentido de que un retraso en cualquiera de esas tareas provoca un retraso en la conclusión del proyecto? 3. Es posible acelerar ciertas tareas para terminar todo el proyecto más pronto?. Si es así, ¿qué tareas serán éstas y cuál sería el costo adicional?

307
Método de la Ruta Crítica (CPM, Critical Path Method): Método utilizado para administrar proyectos en que los tiempos requeridos para terminar las tareas individuales se conocen con relativa certeza (determinísticos). Técnica de Evaluación de Proyectos (PERT, Program Evaluation and Review Technique): Método utilizado para administrar proyectos en que los tiempos requeridos para terminar las tareas individuales son inciertos (probabilísticos).
: Método utilizado para administrar proyectos en que los tiempos requeridos para terminar las tareas individuales son inciertos (probabilísticos).")
308
3.1 Desarrollo de la Red de Proyectos
Para determinar el tiempo de conclusión de un proyecto puede usar los siguientes pasos: 1. Identifique las tareas individuales que componen el proyecto 2. Obtenga una estimación del tiempo de conclusión de cada tarea. 3. Identifique las relaciones entre las tareas. ¿Qué tareas deben concluirse antes de que otras puedan iniciarse? 4. Dibuje un diagrama de red de proyecto para reflejar la información de los pasos 1 y 3

309
Ejemplo: Traslado de las oficinas de una ciudad a otra
El directorio ha fijado un plazo máximo de 22 semanas para la mudanza Ejemplo:

310
Construcción del diagrama de Red:
2 A 4 1 C B 3 ¿Cómo agregamos la actividad D?. Sus predecesoras inmediatas son A y C, además C es predecesora directa de F

311
Actividades Ficticias (figurada):
Es una actividad artificial que no requiere tiempo y que se incluye en una red de proyecto para asegurar la relación de precedencia correcta entre ciertas tareas. Generalmente se representan por líneas segmentadas. Se usan sólo para reflejar las relaciones de precedencia adecuadas 2 A 4 C

312
Volviendo al ejemplo: Agregando el resto de las actividades a la red finalmente se tiene
5 2 E H A 7 6 J F 4 1 8 G C B I 3

313
Siguiendo con el ejemplo: G y H tienen como predecesora inmediata F, además ambas son predecesoras de J, agregar actividad ficticia. D 5 2 E A H 7 6 J F 4 Fic 1 G 9 8 C B I 3 Red Final

314
Ruta Crítica: Dar cumplimiento al plazo límite
Se requiere de las estimaciones de tiempo de cada actividad (supuestos) Ruta Crítica: Dar cumplimiento al plazo límite
 Ruta Crítica: Dar cumplimiento al plazo límite.")
315
Retomando el ejemplo: Agregando los tiempos a las actividades
(4) 5 2 E (8) (3) A H (2) 7 (2) 6 J F (3) 4 Fic G 1 (4) 9 8 (3) C B (5) (5) I 3
 E. (8) (3) A. H. (2) 7. (2) 6. J. F. (3) 4. Fic. G. 1. (4) (3) C. B. (5) (5) I. 3.")
316
Cálculo de la ruta crítica: Tiempo de término del proyecto
Definiciones Tiempo de inicio más inmediato: El tiempo más cercano en que una tarea posiblemente pueda iniciarse (TI) Tiempo de término más breve: El tiempo más corto en el que una tarea posiblemente pueda concluir (TT)
 Tiempo de término más breve: El tiempo más corto en el que una tarea posiblemente pueda concluir (TT)")
317
Reglas a cumplir: Dado que en el proyecto existen tareas predecesoras es necesario conocer cuando termina una y cuando empieza la otra: Regla Para calcular el TI de una tarea se debe conocer los TT de cada tarea predecesora inmediata El TI más inmediato de una tarea de la que se conocen los tiempos de término más breves de todas sus tareas predecesoras inmediatas es el máximo de todos esos tiempos de término más breves. Tiempo de término más breve = (tiempo de inicio más inmediato) + (tiempo de tarea(t))
 + (tiempo de tarea(t))")
318
Pasos para determinar los TI y TT más inmediatos:
1 Identificar el nodo de inicio de la red del proyecto Calcule y escriba en cada arco saliente a) TI más cercano, esto es, 0 b) El TT más breve de acuerdo a la regla 3 TT más breve = (TI más inmediato) + (t) = 0 + t Seleccionar cualquier nodo donde todos los arcos entrantes han sido etiquetados con sus TI y TT
 TI más cercano, esto es, 0. b) El TT más breve de acuerdo a la regla 3. TT más breve = (TI más inmediato) + (t) = 0 + t. Seleccionar cualquier nodo donde todos los arcos entrantes han sido etiquetados con sus TI y TT.")
319
Pasos para determinar los TI y TT más inmediatos:
2 Para el nodo seleccionado en el paso 1 calcule y registre en cada arco saliente a) El TI más breve de acuerdo a la regla 2 TI más breve = MAXIMO(TT de los arcos entrantes) b) El TT más breve de acuerdo a la regla 3 TT más breve = TI más inmediato + t
 El TI más breve de acuerdo a la regla 2. TI más breve = MAXIMO(TT de los arcos entrantes) b) El TT más breve de acuerdo a la regla 3. TT más breve = TI más inmediato + t.")
320
Cálculo de TI y TT: D[8,12] 5 2 E[12,20] A[0, 3] H[10,12] 7 J[20,23]
F[8,10] 6 Fic 4 1 9 G[10,14] 8 C[5,8] B[0, 5] I[5,10] 3
![Cálculo de TI y TT: D[8,12] 5 2 E[12,20] A[0, 3] H[10,12] 7 J[20,23]](http://slideplayer.es/slide/1834373/7/images/320/C%C3%A1lculo+de+TI+y+TT%3A+D%5B8%2C12%5D+5+2+E%5B12%2C20%5D+A%5B0%2C+3%5D+H%5B10%2C12%5D+7+J%5B20%2C23%5D.jpg "F[8,10] 6. Fic G[10,14] 8. C[5,8] B[0, 5] I[5,10] 3.")
321
Identificación de las tareas críticas:
Para identificar las tareas críticas hay que realizar un recorrido hacia atrás hasta el inicio del proyecto, analizando cada tarea. 1. Último Tiempo de término: Lo más tarde que puede concluirse una tarea, en tanto permita que el proyecto se complete lo más pronto posible 2. Último tiempo de inicio: Lo más tarde que pueda iniciarse una tarea, pero finalizando dentro de su tiempo de término. 3. Tarea sucesora: Una tarea para la que la tarea de interés es una predecesora

322
Identificación de las tareas críticas:
Regla 4 5 6 Para calcular el último tiempo de término (UTT) de una tarea particular, debe conocer los últimos tiempos de inicio (UTI) de cada tarea sucesora inmediata. Respecto a una tarea de la que se conocen los últimos tiempos de inicio de todas sus tareas sucesoras inmediatas, el último tiempo de término (UTT) de esa tarea es el mínimo de los últimos tiempos de inicio de todas las tareas sucesoras inmediatas UTI = UTT- t
 de una tarea particular, debe conocer los últimos tiempos de inicio (UTI) de cada tarea sucesora inmediata. Respecto a una tarea de la que se conocen los últimos tiempos de inicio de todas sus tareas sucesoras inmediatas, el último tiempo de término (UTT) de esa tarea es el mínimo de los últimos tiempos de inicio de todas las tareas sucesoras inmediatas. UTI = UTT- t.")
323
Identificación de las tareas críticas: Pasos para calcular los últimos tiempos de inicio y término
Identificar el final del proyecto. Calcular y escribir en cada arco entrante: a) Último tiempo de término del proyecto b) Último tiempo de inicio (Regla 6): UTI=UTT-t Seleccione un nodo, cuyos arcos salientes hayan sido etiquetados todos con sus UTI y UTT Para el nodo seleccionado (paso 1) calcule y escriba lo siguiente a) UTT= MIN(UTI arcos salientes), (regla 5) b) UTI=UTT - t (regla 6) Repetir pasos 1 y 2 hasta cubrir toda la red del proyecto 1 2 3
 Último tiempo de término del proyecto. b) Último tiempo de inicio (Regla 6): UTI=UTT-t. Seleccione un nodo, cuyos arcos salientes hayan sido etiquetados todos con sus UTI y UTT. Para el nodo seleccionado (paso 1) calcule y escriba lo siguiente. a) UTT= MIN(UTI arcos salientes), (regla 5) b) UTI=UTT - t (regla 6) Repetir pasos 1 y 2 hasta cubrir toda la red del proyecto")
324
Identificación de las tareas críticas: Cálculo de UTT y UTI para cada actividad
Iteración 1 Nodo 9 Actividad J UTT = 23 UTI = 23-3 = 20 Actividad I UTT = 23 UTI = 23-5 = 18 Nodo 7 Actividad E Iteración 2 UTT = 20 UTI = 20-8 = 12 Actividad H UTT = 20 UTI = 20-2 = 18 Actividad ficticia UTT = 20 UTI = 20-0 = 20

325
Identificación de las tareas críticas: Cálculo de UTT y UTI para cada actividad . Finalmente se tiene D[8,12] 5 2 [8,12] E[12,20] [12,20] A[0, 3] H[10,12] [5,8] 7 J[20,23] F[8,10] [18,20] 6 G[10,14] Fic [20,23] 4 [14,16] 1 9 [16,20] 8 B[0, 5] C[5,8] [5,8] [0,5] I[5,10] [18,23] 3

326
Identificación de las tareas críticas:
Holgura: Es la cantidad de tiempo que puede demorar una actividad sin afectar la fecha de término del proyecto. El valor de la holgura para cada actividad está dada por: holgura = TI - UTI = TT - UTT Ejemplo: Actividad C: TI = 5, UTI = 5, TT = 8, UTT = 8 Holgura = = = 0 Actividad I: TI = 5, UTI = 18, TT = 10, UTT = 23 La actividad C tiene holgura 0, por tanto no puede retrasarse, en cambio la actividad I tiene 13 semanas de holgura que permite retrasar su inicio.

327
Identificación de las tareas críticas:
Resumen de los tiempos de las actividades del proyecto: Tiempo de ejecución del proyecto: 23 semanas

328
Identificación de las tareas críticas:
Actividad crítica es aquella que tiene holgura cero Ruta crítica es una secuencia de tareas (actividades) críticas que conecta el principio del proyecto con el fin En nuestro ejemplo: Actividades críticas: B, C, D, E y J Ruta crítica: Nodos Actividades B-C-D-E-J
 críticas que conecta el principio del proyecto con el fin. En nuestro ejemplo: Actividades críticas: B, C, D, E y J. Ruta crítica: Nodos Actividades B-C-D-E-J.")
329
Formas de Reducir la duración del proyecto:
1. Análisis Estratégico Aquí el analista se pregunta: “¿Este proyecto tiene que desarrollarse en la forma programada actualmente?”. En concreto, “¿Todas las actividades de la ruta crítica tienen que realizarse en el orden especificado?”. ¿Podemos hacer arreglos para efectuar algunas de estas actividades en forma distinta de cómo aparecen en la ruta crítica?. 2. Enfoque Táctico El analista presupone que el diagrama en curso es adecuado y trabaja para reducir el tiempo de ciertas actividades de la ruta crítica asignando mayores recursos. Por ejemplo tiempo, aumento de mano de obra, etc.

330
Formas de Reducir la duración del proyecto:
Para el ejemplo en estudio, el directorio estimó un tiempo máximo de 22 semanas para realizar el proyecto, y según el estudio se ha determinado que se requieren 23 semanas, ¿Cómo soluciona Ud. el problema?. Realice distintos supuestos válidos para su solución. ¿Es única?.

331
Formas de Reducir la duración del proyecto: Alternativa de solución
Realizados algunos estudios los responsables de la mudanza, se dan cuenta que la actividad J (entrenamiento de los nuevos empleados) debe realizarse en el nuevo edificio (después de completar la actividad E) y después de que el personal clave y de registros se haya mudado (al completar la actividad H). Estos requerimientos se podrían cambiar: Realizar J independientemente de H El entrenamiento realizarlo en otras dependencias a un costo reducido y que estén listos para cuando se termine la construcción. Esto requiere agregar otra actividad: Garantizar recursos de entrenamiento, actividad K
 debe realizarse en el nuevo edificio (después de completar la actividad E) y después de que el personal clave y de registros se haya mudado (al completar la actividad H). Estos requerimientos se podrían cambiar: Realizar J independientemente de H. El entrenamiento realizarlo en otras dependencias a un costo reducido y que estén listos para cuando se termine la construcción. Esto requiere agregar otra actividad: Garantizar recursos de entrenamiento, actividad K.")
332
Formas de Reducir la duración del proyecto:
Con los cambios anteriores, es posible que la red redefinida tenga una nueva ruta crítica con un tiempo menor, aunque todavía insatisfactorio (mayor a las 22 semanas establecidas).
.")
333
Diagrama de red para el proyecto redefinido
(4) 5 2 E (8) H (2) A (3) 6 F (2) G (4) 9 K (3) J (3) 4 7 1 8 Fic C (3) B I (5) (5) 3
 E. (8) H. (2) A. (3) 6. F. (2) G. (4) 9. K. (3) J. (3) Fic. C. (3) B. I. (5) (5) 3.")
334
Actualización de los tiempos para el proyecto redefinido
Actividades ruta crítica: B-C-D-E Duración del proyecto: 20 semanas

335
3.3 PERT: Variabilidad en los tiempos de Actividades
Hasta ahora hemos trabajado asumiendo que los tiempos de duración de las actividades eran determinísticos, en consecuencia TI, TT, UTI y UTT también fueron deducidos como deterministas. Como este supuesto no siempre es correcto, PERT emplea una fórmula especial para estimar los tiempos de las actividades. PERT requiere de alguien que conozca bien una actividad en cuestión, para producir tres estimaciones del tiempo de ésta.

336
PERT: Variabilidad en los tiempos de Actividades
1. Tiempo optimista (denotado por a): el tiempo mínimo. Todo tiene que marchar a la perfección. 2. Tiempo más probable (denotado por m): el tiempo que se necesita en circunstancias ordinarias. 3. Tiempo pesimista (denotado por b): el tiempo máximo. Situación que se da en el peor caso.
: el tiempo mínimo. Todo tiene que marchar a la perfección. 2. Tiempo más probable (denotado por m): el tiempo que se necesita en circunstancias ordinarias. 3. Tiempo pesimista (denotado por b): el tiempo máximo. Situación que se da en el peor caso.")
337
PERT: Variabilidad en los tiempos de Actividades
Ejemplo: Para la actividad E (8 semanas). Al examinar en detalle el proyecto de construcción del interior se llegó a las siguientes estimaciones: a = 4 m = 7 b = 16 Para estimar el valor esperado y la desviación estándar de los tiempos de la actividad, se asume que el tiempo de la actividad es una variable aleatoria que tiene una distribución de probabilidad unimodal beta.
. Al examinar en detalle el proyecto de construcción del interior se llegó a las siguientes estimaciones: a = 4. m = 7. b = 16. Para estimar el valor esperado y la desviación estándar de los tiempos de la actividad, se asume que el tiempo de la actividad es una variable aleatoria que tiene una distribución de probabilidad unimodal beta.")
338
PERT: Variabilidad en los tiempos de Actividades
Distribución beta a m b Estimación del tiempo esperado de actividad o tiempo promedio Estimación de la desviación estándar del tiempo de la actividad

339
PERT: Variabilidad en los tiempos de Actividades
Estimación de tiempo

340
PERT: Variabilidad en los tiempos de Actividades
Cálculo del tiempo esperado de finalización de proyectos Una vez determinado el tiempo promedio de cada actividad, se puede calcular el tiempo de finalización más temprano esperado para el proyecto completo. Se determinan los tiempos de inicio y de término más cercano, como también los tiempos de término y de inicio más lejano. Con estos tiempos se determina la holgura en cada actividad, para finalmente determinar la ruta crítica, exactamente igual como se hizo para tiempo determinista.

341
PERT: Variabilidad en los tiempos de Actividades
Probabilidad de concluir el proyecto a tiempo El análisis procede de la siguiente forma: 1. Sea T el tiempo total que durarán las actividades de la ruta crítica. 2. Encuéntrese la probabilidad de que el valor de T resulte menor o igual que cualquier valor específico de interés. Para el ejemplo en estudio buscaríamos T 22 semanas. Una buena aproximación de esta probabilidad se encuentra aceptando dos supuestos: a) Los tiempos de actividad son variables aleatorias independientes. b) La variable T tiene una distribución aproximadamente normal.
 Los tiempos de actividad son variables aleatorias independientes. b) La variable T tiene una distribución aproximadamente normal.")
342
PERT: Variabilidad en los tiempos de Actividades
La meta es encontrar P{T 22}, donde T es el tiempo a lo largo de la ruta crítica. Estadísticas de la ruta crítica: Desviación estándar Desviación estándar de i-ésima actividad de la ruta crítica T : es el tiempo esperado (promedio)
")
343
Estimación de terminación del proyecto
Uso de la tabla de distribución normal, entonces debemos calcular Z para llegar a determinar la probabilidad.

344
Cálculos caso en estudio
Ruta crítica: B- C- D y E T = 20 (tiempo esperado, promedio calculado, ) x = 22 (tiempo exigido)
 x = 22 (tiempo exigido)")
345
Cálculos caso en estudio
Z = 0,8485 En la tabla de Z P(Z 0,8485) = 0,80
 = 0,80.")
346
Matriz de Encadenamiento
Una matriz de encadenamiento, es una matriz de NxN (N es la cantidad de actividades) donde cada celda se marca con una X si la actividad de la fila requiere que esté terminada la actividad de la columna. Esta matriz ayuda a la construcción de la red CPM Para el ejemplo en estudio es:
 donde cada celda se marca con una X si la actividad de la fila requiere que esté terminada la actividad de la columna. Esta matriz ayuda a la construcción de la red CPM. Para el ejemplo en estudio es:")
347
3.4 CPM: TRUEQUE ENTRE TIEMPO Y COSTO
CPM considera que el tiempo extra (costo) puede reducir el tiempo de término de una actividad, y en consecuencia reducir el tiempo total del proyecto Compra de tiempo: CPM usa dos estimaciones: tiempo y costo normal, a lo que se agregará tiempo y costo intensivo Se asume que estas estimaciones son lineales: Esfuerzo intensivo Costo Esfuerzo normal Tiempo
 puede reducir el tiempo de término de una actividad, y en consecuencia reducir el tiempo total del proyecto. Compra de tiempo: CPM usa dos estimaciones: tiempo y costo normal, a lo que se agregará tiempo y costo intensivo. Se asume que estas estimaciones son lineales: Esfuerzo intensivo. Costo. Esfuerzo normal. Tiempo.")
348
Red de tiempo mínimo – costo mínimo
CPM: Trueque entre el costo y el tiempo Red de tiempo mínimo – costo mínimo Debido a las estimaciones de CPM se puede obtener dos redes extremas: Red de costo normal Red de costo intensivo ¿Todas las actividades deben realizarse en forma intensiva? 3. Red de tiempo mínimo—costo mínimo

349
Enfoques para encontrar red de tiempo mínimo – costo mínimo
CPM: Trueque entre el costo y el tiempo Enfoques para encontrar red de tiempo mínimo – costo mínimo Comenzar con la red normal e ir reduciendo los tiempos de término hasta un mínimo. Comenzar con la red de todo intensivo y “desintensificar” actividades para reducir el costo sin afectar el tiempo total. Comenzar con la ruta crítica de la red de todo intensivo con un tiempo mínimo, pero con todas la demás actividades normales. Después reducir las otras trayectorias como sea necesario. ¿Todos son igualmente eficaces?

350
Enfoque: Red normal y reducción de tiempos
CPM: Trueque entre el costo y el tiempo Enfoque: Red normal y reducción de tiempos Proyecto: Construcción de una casa

351
CPM: Trueque entre el costo y el tiempo
Paso 1: Red del proyecto Si consideramos la convención actividad-flecha, el grafo del proyecto es: 5 3 G(2) E(3) B(2) H(2) F(2) A(4) C(3) 7 1 2 4 6 D(1)
 E(3) B(2) H(2) F(2) A(4) C(3) D(1)")
352
Paso 2: Tiempos de Inicio y de Término, holgura y ruta crítica
CPM: Trueque entre el costo y el tiempo Paso 2: Tiempos de Inicio y de Término, holgura y ruta crítica En el grafo se muestran los tiempos de inicio y de término más próximos y los más lejanos, y la ruta crítica. El tiempo mínimo para la ruta crítica es de 12 semanas a un costo normal de $8.000. 5 3 (0)[6,6] E(3)[7,10] G(2)[10,12] B(2)[4,6] [7,10] [10,12] 12 12 0 0 [5,7] [7,7] A(4)[0,4] C(3)[4,7] F(2)[7,9] H(2)[9,11] 7 1 2 4 6 [10,12] [4,7] [8,10] [0,4] D(1)[4,5] [11,12]
[6,6] E(3)[7,10] G(2)[10,12] B(2)[4,6] [7,10] [10,12] [5,7] [7,7] A(4)[0,4] C(3)[4,7] F(2)[7,9] H(2)[9,11] [10,12] [4,7] [8,10] [0,4] D(1)[4,5] [11,12]")
353
Paso 2: Tabla de tiempos próximos y lejanos
CPM: Trueque entre el costo y el tiempo Paso 2: Tabla de tiempos próximos y lejanos Actividades críticas

354
Paso 3: “Intensificar” actividades ruta crítica
CPM: Trueque entre el costo y el tiempo Paso 3: “Intensificar” actividades ruta crítica Actividad A: de 4 a 3 semanas ( 600) Actividad C: de 3 a 1 semana (1.000) Actividad E: de 3 a 2 semanas ( 700) Actividad G: de 2 a 1 semana ( 400) ¿Es posible hacer estas reducciones?
 Actividad C: de 3 a 1 semana (1.000) Actividad E: de 3 a 2 semanas ( 700) Actividad G: de 2 a 1 semana ( 400) ¿Es posible hacer estas reducciones")
355
Reducción de Actividades ruta crítica
CPM: Trueque entre el costo y el tiempo Reducción de Actividades ruta crítica 5 3 E(3 2) G(2 1) B(2)[4,6] 0 0 A(4 3) C(3 1) F(2)[7,9] H(2)[9,11] 7 1 2 4 6 D(1)[4,5] La ruta crítica disminuyó a 7 semanas, ¿seguirá manteniéndose como tal?. No Hay que ver si es posible reducir las actividades paralelas a la ruta crítica inicial, sólo hasta igualar tiempos.
 G(2 1) B(2)[4,6] 0 0. A(4 3) C(3 1) F(2)[7,9] H(2)[9,11] D(1)[4,5] La ruta crítica disminuyó a 7 semanas, ¿seguirá manteniéndose como tal . No. Hay que ver si es posible reducir las actividades paralelas a la ruta crítica inicial, sólo hasta igualar tiempos.")
356
CPM: Trueque entre el costo y el tiempo
Paso 4: “Intensificar” actividades que no están en la ruta crítica (“paralelas”) Actividad B (paralela a C): de 2 a 1 semana (500) ¿Actividad F o H? (¿o ambas?). En este caso sólo F: de 2 a 1 semana (200) Actividad D: No requiere reducción
 Actividad B (paralela a C): de 2 a 1 semana (500) ¿Actividad F o H (¿o ambas ). En este caso sólo F: de 2 a 1 semana (200) Actividad D: No requiere reducción.")
357
Paso 4: Resumen de las reducciones
CPM: Trueque entre el costo y el tiempo Paso 4: Resumen de las reducciones

358
CPM: Trueque entre el costo y el tiempo
Grafo final En el grafo se muestran los tiempos de inicio y de término más próximos y los más lejanos, y la ruta crítica. El tiempo mínimo para la ruta crítica es de 7 semanas a un costo normal de $ 5 3 G(1)[6,7] (0)[4,4] E(2)[4,6] B(1)[3,4] [4,6] [6,7] 7 7 0 0 [5,7] [7,7] A(3)[0,3] C(1)[3,4] F(1)[4,5] H(2)[5,7] 7 1 2 4 6 [5,7] [3,4] [4,5] [0,3] D(1)[3,4] [6,7]
[6,7] (0)[4,4] E(2)[4,6] B(1)[3,4] [4,6] [6,7] [5,7] [7,7] A(3)[0,3] C(1)[3,4] F(1)[4,5] H(2)[5,7] [5,7] [3,4] [4,5] [0,3] D(1)[3,4] [6,7]")
359
CPM: Trueque entre el costo y el tiempo
Red óptima ¿Qué sucede si un proyecto lleva más tiempo del especificado? ¿Conviene hacer más “intensivo” el proyecto o pagar la penalización por atraso? Ejemplo: Suponga que en el proyecto de la casa hay una penalización de $450 por cada semana de tiempo extra después de ocho semanas. ¿Cuál es la red óptima?. Solución: Reducir la red en una semana cada vez e ir comparando si los costos por intensificar son menores a los costos por penalización. Se termina cuando los costos de penalización son mayor a los costos de intensificar.

360
Red óptima Reducir una semana (de 12 a 11 semanas)
CPM: Trueque entre el costo y el tiempo Red óptima Reducir una semana (de 12 a 11 semanas) De la red normal analizar ruta crítica Actividades Incremento de Costo A 600 C 500 E 700 G 400 Conclusión: Intensificar 1 semana la actividad G (400<450). Intentar reducir una segunda semana (de 11 a 10) Todos los costos incrementales de la ruta son mayores a la penalización. Intentar por las vías paralelas. No hay rutas alternativas cuya reducción implique un costo menor al de penalización.
 De la red normal analizar ruta crítica. Actividades Incremento de Costo. A 600. C 500. E 700. G 400. Conclusión: Intensificar 1 semana la actividad G (400<450). Intentar reducir una segunda semana (de 11 a 10) Todos los costos incrementales de la ruta son mayores a la penalización. Intentar por las vías paralelas. No hay rutas alternativas cuya reducción implique un costo menor al de penalización.")
361
Solución Grafo resultante 3 5 7 1 2 4 6
CPM: Trueque entre el costo y el tiempo Grafo resultante 3 5 G(1) E(3) B(2) A(4) C(3) F(2) H(2) 7 1 2 4 6 D(1) Conviene hacer intensivo el proyecto hasta la semana 11 y pagar las penalizaciones por las semanas de atraso Costo total = Costo intensivo + costo penalización = ( ) + 3*450 = $9.650
 E(3) B(2) A(4) C(3) F(2) H(2) D(1) Conviene hacer intensivo el proyecto hasta la semana 11 y pagar las penalizaciones por las semanas de atraso. Costo total = Costo intensivo + costo penalización. = ( ) + 3*450 = $")
362
Ejemplo CPM: Trueque entre el costo y el tiempo Suponga que un proyecto de investigación tiene las siguientes estimaciones: Dibuje la red. Con los tiempos normales de las actividades, encuéntrese la duración total del proyecto y la ruta crítica. Supóngase que el proyecto se debe completar en un tiempo mínimo. ¿Cuál es el menor costo para el proyecto, es decir, cuál es la red de tiempo mínimo—costo mínimo? ¿Cuál es el costo mínimo para terminar el proyecto en 17 meses? El departamento de comercialización dice que cada mes que el proyecto se pase de 15 meses le cuesta a la firma $ ¿Cuál es el costo y duración óptimo del proyecto?

363
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Identificación de Variables de decisión Están relacionadas directamente con el tiempo a reducir en cada tarea Yi: Tiempo (horas, días, ..) a reducir de la i-ésima actividad YA: Número de semanas en las cuales acortar la actividad A b) Función Objetivo El objetivo es minimizar los recursos adicionales totales requeridos para satisfacer el tiempo de término del proyecto. Para el ejemplo en estudio, en la tabla de especificaciones agregamos dos columnas: Tiempo máximo a reducir por tarea y el costo adicional por semana intensiva
 Identificación de Variables de decisión. Están relacionadas directamente con el tiempo a reducir en cada tarea. Yi: Tiempo (horas, días, ..) a reducir de la i-ésima actividad. YA: Número de semanas en las cuales acortar la actividad A. b) Función Objetivo. El objetivo es minimizar los recursos adicionales totales requeridos para satisfacer el tiempo de término del proyecto. Para el ejemplo en estudio, en la tabla de especificaciones agregamos dos columnas: Tiempo máximo a reducir por tarea y el costo adicional por semana intensiva.")
364
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Por lo tanto la función es: MIN Z = 600YA+500YB+500YC+700YE+200YF+400YG+400YH
 Por lo tanto la función es: MIN Z = 600YA+500YB+500YC+700YE+200YF+400YG+400YH.")
365
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) c) Identificación de las restricciones Para el ejemplo, se pueden agrupar en dos grupos La cantidad máxima de tiempo en el cual se puede acortar cada actividad. El tiempo de término del proyecto (en este caso 12 semanas) Para el grupo 1, lo que se necesita son las cotas superiores sobre las variables de decisión (YA, YB, YC, YE, YF, YG, YH) dada por la columna “Reducción máxima) de la tabla anterior.
 c) Identificación de las restricciones. Para el ejemplo, se pueden agrupar en dos grupos. La cantidad máxima de tiempo en el cual se puede acortar cada actividad. El tiempo de término del proyecto (en este caso 12 semanas) Para el grupo 1, lo que se necesita son las cotas superiores sobre las variables de decisión (YA, YB, YC, YE, YF, YG, YH) dada por la columna Reducción máxima) de la tabla anterior.")
366
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Restricciones de Límite 0<=YA<= 1 (límite de A) 0<=YB<= 1 (límite de B) 0<=YC<= 2 (límite de C) 0<=YD<= 0 (límite de D) 0<=YE<= 1 (límite de E) 0<=YF<= 1 (límite de F) 0<=YG<= 1 (límite de G) 0<=YH<= 1 (límite de H)
 Restricciones de Límite. 0<=YA<= 1 (límite de A) 0<=YB<= 1 (límite de B) 0<=YC<= 2 (límite de C) 0<=YD<= 0 (límite de D) 0<=YE<= 1 (límite de E) 0<=YF<= 1 (límite de F) 0<=YG<= 1 (límite de G) 0<=YH<= 1 (límite de H)")
367
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Restricciones del grupo 2 están en función de nuevas variables que expresan cuando las actividades que salen de un determinado evento pueden comenzar. Requiere conocer cuando terminan todas las actividades que llegan al evento. Dependen de Yi X1 : tiempo en que todas las actividades que salen del evento 1 pueden comenzar X2 : tiempo en que todas las actividades que salen del evento 2 pueden comenzar ...... X7 : tiempo en que todas las actividades que salen del evento 7 pueden comenzar Además el proyecto debe comenzar en el tiempo 1 y terminar a lo más en 12 semanas X1 = 0 X7 12
 Restricciones del grupo 2 están en función de nuevas variables que expresan cuando las actividades que salen de un determinado evento pueden comenzar. Requiere conocer cuando terminan todas las actividades que llegan al evento. Dependen de Yi. X1 : tiempo en que todas las actividades que salen del evento 1 pueden comenzar. X2 : tiempo en que todas las actividades que salen del evento 2 pueden comenzar X7 : tiempo en que todas las actividades que salen del evento 7 pueden comenzar. Además el proyecto debe comenzar en el tiempo 1 y terminar a lo más en 12 semanas. X1 = 0. X7 12.")
368
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Asociando las variables a la red tenemos: X5 X3 5 3 G(2) E(3) B(2) (0) (3-YE) (2-YG) (2-YB) X7 X4 X6 X1 X2 H(2) F(2) A(4) C(3) 7 1 2 4 6 (2-YF) (2-YH) (4-YA) (3-YC) D(1) (1-YD)
 Asociando las variables a la red tenemos: X5. X G(2) E(3) B(2) (0) (3-YE) (2-YG) (2-YB) X7. X4. X6. X1. X2. H(2) F(2) A(4) C(3) (2-YF) (2-YH) (4-YA) (3-YC) D(1) (1-YD)")
369
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) Nodo 2 Tiempo de inicio de las tareas que salen del nodo 2 tiempo de terminación de todas las tareas que entran al nodo 2 Tiempo de inicio de las tareas B, C y D (tiempo de terminación de la tarea A + (tiempo acortado de la tarea A) X2 X1 + (4-YA) Nodo 3 Tiempo de inicio de las tareas que salen del nodo 3 tiempo de terminación de todas las tareas que entran al nodo 3 Tiempo de inicio de la tarea Ficticia (tiempo de terminación de la tarea B + (tiempo acortado de la tarea B) X3 X2 + (2-YB)
 Nodo 2. Tiempo de inicio de las tareas que salen del nodo 2 tiempo de terminación de todas las tareas que entran al nodo 2. Tiempo de inicio de las tareas B, C y D (tiempo de terminación de la tarea A + (tiempo acortado de la tarea A) X2 X1 + (4-YA) Nodo 3. Tiempo de inicio de las tareas que salen del nodo 3 tiempo de terminación de todas las tareas que entran al nodo 3. Tiempo de inicio de la tarea Ficticia (tiempo de terminación de la tarea B + (tiempo acortado de la tarea B) X3 X2 + (2-YB)")
370
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Nodo 4 Tiempo de inicio de las tareas que salen del nodo 4 tiempo de terminación de todas las tareas que entran al nodo 4. Hay dos arcos que entran al nodo, las actividades E y F deben comenzar sólo cuando las tareas que entran (C y la ficticia) hayan terminado. Dando origen así a dos restricciones (una por cada actividad) Restricción de la actividad C Tiempo de inicio de las tareas E y F tiempo de terminación de la tarea C Tiempo de inicio de las tareas E y F (tiempo de terminación de la tarea C + (tiempo acortado de la tarea C) X4 X2 + (3-Yc) (tarea C)
 hayan terminado. Dando origen así a dos restricciones (una por cada actividad) Restricción de la actividad C. Tiempo de inicio de las tareas E y F tiempo de terminación de la tarea C. Tiempo de inicio de las tareas E y F (tiempo de terminación de la tarea C + (tiempo acortado de la tarea C) X4 X2 + (3-Yc) (tarea C)")
371
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Nodo 4 Restricción de la actividad Ficticia Tiempo de inicio de las tareas E y F tiempo de terminación de la tarea figurada Tiempo de inicio de las tareas E y F (tiempo de terminación de la tarea Figurada + (tiempo acortado de la tarea Figurada) X4 X (tarea Figurada) Aplicando sistemáticamente el procedimiento y se escribe una restricción para cada actividad se obtienen las siguientes restricciones para los nodos 5 al 7
 X4 X3 + 0 (tarea Figurada) Aplicando sistemáticamente el procedimiento y se escribe una restricción para cada actividad se obtienen las siguientes restricciones para los nodos 5 al 7.")
372
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Nodo 5 X5 X4 + (3-YE) (actividad E) Nodo 6 X6 X4 + (2-YF) (actividad F) Nodo 7 X7 X5 + (2-YG) (actividad G) X7 X6 + (2-YH) (actividad H)
 (actividad E) Nodo 6. X6 X4 + (2-YF) (actividad F) Nodo 7. X7 X5 + (2-YG) (actividad G) X7 X6 + (2-YH) (actividad H)")
373
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) MIN Z = 600YA+500YB+500YC+700YE+200YF+400YG+400YH Sujeto a: Restricciones de Límite 0<=YA<= 1 (límite de A) 0<=YB<= 1 (límite de B) 0<=YC<= 2 (límite de C) 0<=YD<= 0 (límite de D) 0<=YE<= 1 (límite de E) 0<=YF<= 1 (límite de F) 0<=YG<= 1 (límite de G) 0<=YH<= 1 (límite de H)
 MIN Z = 600YA+500YB+500YC+700YE+200YF+400YG+400YH. Sujeto a: Restricciones de Límite. 0<=YA<= 1 (límite de A) 0<=YB<= 1 (límite de B) 0<=YC<= 2 (límite de C) 0<=YD<= 0 (límite de D) 0<=YE<= 1 (límite de E) 0<=YF<= 1 (límite de F) 0<=YG<= 1 (límite de G) 0<=YH<= 1 (límite de H)")
374
Modelo de PL para CPM (Tiempo mínimo—costo mínimo)
CPM: Trueque entre el costo y el tiempo Modelo de PL para CPM (Tiempo mínimo—costo mínimo) X1 = 0 X7 12 X2 X1 + (4-YA) (tarea C) X3 X2 + (2-YB) (tarea B) X4 X2 + (3-Yc) (tarea C) X4 X (tarea Figurada) X5 X4 + (3-YE) (actividad E) X6 X4 + (2-YF) (actividad F) X7 X5 + (2-YG) (actividad G) X7 X6 + (2-YH) (actividad H) X1, ..., X7 0
 X1 = 0. X7 12. X2 X1 + (4-YA) (tarea C) X3 X2 + (2-YB) (tarea B) X4 X2 + (3-Yc) (tarea C) X4 X3 + 0 (tarea Figurada) X5 X4 + (3-YE) (actividad E) X6 X4 + (2-YF) (actividad F) X7 X5 + (2-YG) (actividad G) X7 X6 + (2-YH) (actividad H) X1, ..., X7 0.")
375
Ejercicios: Para su entretención La complejidad de las redes CPM está más afectada por las interrelaciones que el número de nodos. Por ejemplo, considérese el proyecto siguiente: Existen 7 trayectorias en esta red. Encuéntrense todas. b) Con tiempos normales, encuéntrese la longitud de cada trayectoria. ¿Cuál es la ruta crítica? c) ¿Cuál es el costo mínimo intensivo para reducir el proyecto a 39 días? ¿a 38 días? ¿a 37 días? d) Encuéntrese la red de tiempo mínimo—costo mínimo.
 Con tiempos normales, encuéntrese la longitud de cada trayectoria. ¿Cuál es la ruta crítica c) ¿Cuál es el costo mínimo intensivo para reducir el proyecto a 39 días ¿a 38 días ¿a 37 días d) Encuéntrese la red de tiempo mínimo—costo mínimo.")
Presentaciones similares
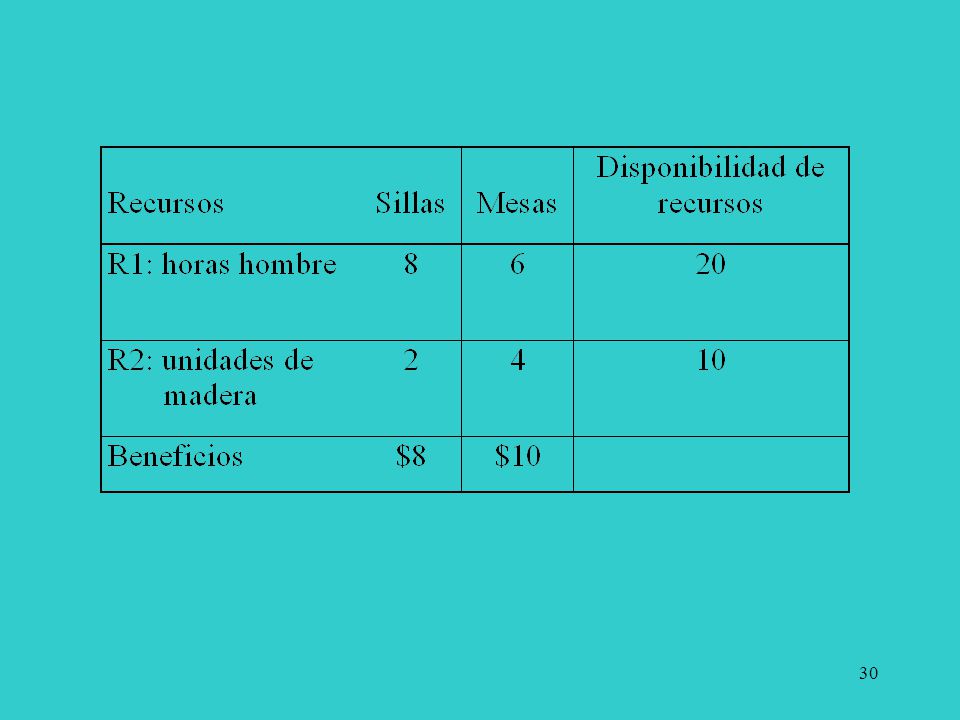
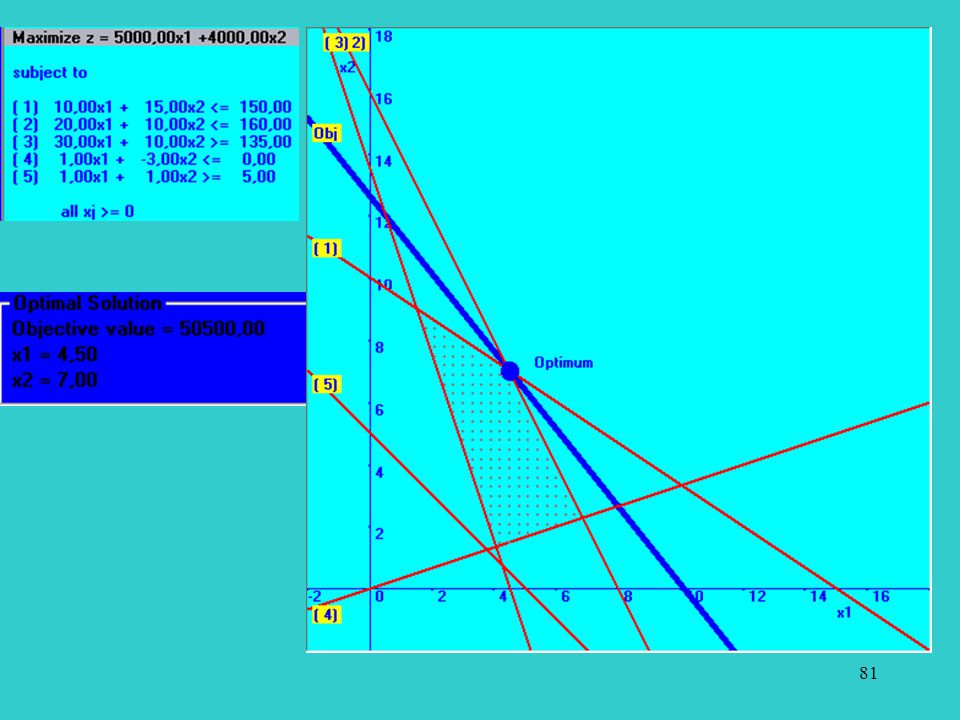
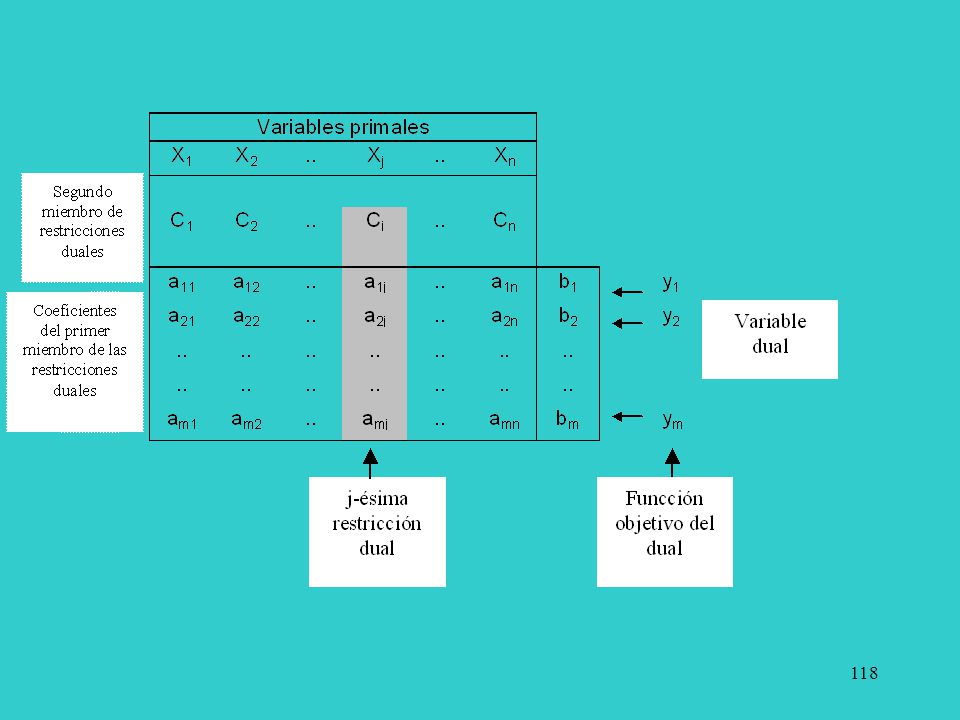







>")











