Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Geometría del elipsoide y proyecciones
Geodesia 2008 Geometría del elipsoide y proyecciones

2
Sistema Geodésico de Referencia
* Un SGR está definido por parámetros geodésicos fundamentales obtenidos a partir de mediciones sobre la Tierra: a - Semieje mayor del elipsoide J2 - Factor dinámico GM - Constante Gravitacional - Velocidad angular de la Tierra Queda definido a partir de la adopción de um elipsoide de referencia, posicionado y orientado en relación a la superficie de la Tierra. Se accede a ellos a través de las redes geodésicas de referencia. - La adopción de un elipsoide de revolución NO es accidental. Es la figura resultante del movimiento de partículas sometidas a rotación y bajo la acción de un campo gravitacional Ejemplos de SGR: WGS84, GRS80 entre otros.

3
El elipsoide Ecuación de un elipsoide triaxial Elementos de una elipse

4
Relaciones geométricas

5
La longitud de arco en una elipse meridiana

6
Resolución: iterativa Resolución: No iterativa
N: Radio de curvatura del primer vertical, Gran normal o normal principal. Meridiano de Greenwich Ecuador Resolución: iterativa Resolución: No iterativa

7
Secciones Normales Plano Normal: cualquier plano que contenga a la normal a un punto P Sección Normal: curva resultante de la intersección de un plano normal con la superficie elipsóidica. Las principales: sección meridiana y la sección del primer vertical Sección normal del primer vertical Secciones oblicuas y su radio de curvatura

8
Secciones recíprocas y el problema en la determinación de la geodésica
Para la esfera Para el elipsoide Secciones normales: directa( de P1 a P2) y recíproca (de P2 a P1). Las secciones directa y recíprocas coinciden sólo cuando ambos puntos poseen la misma latitud o la misma longitud.
 y recíproca (de P2 a P1). Las secciones directa y recíprocas coinciden sólo cuando ambos puntos poseen. la misma latitud o la misma longitud.")
9
La geodésica: Se la define como “la curva que representa el menor camino entre dos vértices geodésicos sobre el elipsoide de revolución. Se ubica en el medio de ambas secciones normales” Problema directo: consiste en calcular la coordenada de un punto a partir de conocida la posición de un primer punto, el acimut y la distancia entre ambos. Problema inverso: a partir de las coordenadas de dos puntos, se busca el acimut directo y la distancia real entre ambos

10
Sistema local de coordenadas y su relación con uno global
Fuente: Torgue, 1980.

11
Proyecciones Cartográficas
Las proyecciones cartográficas para un conjunto de puntos son consideradas biunívocas. Una proyección cartográfica debe propiciar la determinación de distancias, áreas, azimuts, etc . Es importante recuperar las coordenadas originarias de la misma. Para ello es de extrema importancia conocer el SGR y el tipo de proyección empleada. Escala 1: ,065 1: ,26 1: ,65 1: ,30 1: ,60 1: ,50 1: ,0 1: ,5 ,0 Desplazam. en mm para una variación de 65m en las coordenadas

12
Proyecciones cartográficas: Proyección Gauss Kruger
Se define: Origen: meridiano de tangencia Eje X: coordenada Norte Eje Y: coordenada Este El paralelo de referencia es el Ecuador X, Y = f(φ,λ)
")
13
Principales Características de la Proyección Gauss Kruger
NO ES UN SISTEMA Cada faja tiene una ancho de 3°. En nuestro país se han utilizado 7 cilindros ≡ 7 fajas, contando la primera desde Longitud -72°. El origen se encuentra en el Polo Sur (latitud -90°) La coordenada X de un punto denota la cantidad de metros que hay desde el mismo hasta el polo Sur. La coordenada Y denota la cantidad de metros que existen desde el punto hasta el meridiano central
 La coordenada X de un punto denota la cantidad de metros que hay desde el mismo hasta el polo Sur. La coordenada Y denota la cantidad de metros que existen desde el punto hasta el meridiano central")
14
Referencias Drewes&Sanches, Sistemas de Referencia en Geodesia.
Hofmann Wellenhof &Moritz, Physical Geodesy. Torgue W., Geodesy. Capítulo 2. Dalozana Regiane, Geometría do elipsóide. Freitas Silvio R.C. , Sistemas Geodésicos de Referência e Bases Cartográficas-Aspectos Introductórios.

15
Transformación entre Sistemas

16
-Conexión entre sistemas locales y globales
Datum geodésico: define la orientación y ubicación de un sistema local de referencia respecto de un sistema global convencional. Este nos permitirá pasar de un sistema a otro, por ej: de Campo Inchauspe a Posgar94. Metodología: a,f Hayford Parámetros de transformación a ,f WGS84 Utilidades: -Conexión entre sistemas locales y globales -Conexión entre distintas realizaciones de un sistema global de referencia -Conexión entre el posicionamiento con GPS y la cartografía existente.

17
Algunas definiciones Sistema de Referencia Terrestre: es un sistema de referencia espacial co-rotando con la Tierra en su movimiento diurno. Así los puntos fijos a la superficie de terrestre tienen coordenadas que varían muy poco en el tiempo por causas geofísicas. Marco de Referencia Terrestre: es un set de puntos físicos cuyas coordenadas son determinadas con precisión en el sistema de coordenadas específicos asociadas al Sistema de Referencia El sistema ideal: es un triedro asociado a la Tierra y co-rota con ella. Desde el punto de vista Newtoniano, el espacio físico es considerado un espacio euclidiano afín de dimensión 3. Consideraremos sistemas para los cuales el origen es cercano al centro de masa terrestre, la orientación es ecuatorial y la escala es próxima a la del SI. La transformación estándar entre dos sistemas será una transformación euclidiana de 7 parámetros: 3 componentes de traslación, uno de escala y 3 ángulos de rotación.

18
Transformación de 7 parámetros
X2 = ΔX + (1 + μ) Rx (α)Ry ( β) Rz( γ) X1 - ΔX: traslación - (1+μ) : factor de escala - Rx(α), Ry(β), Rz(γ): Rotaciones de los ejes Si los ángulos son pequeños… X2 = ΔX+ (1 + μ) RG X1 X2 = ΔX + (1 + μ)(I + dθ)X1
 Rx (α)Ry ( β) Rz( γ) X1. - ΔX: traslación. - (1+μ) : factor de escala. - Rx(α), Ry(β), Rz(γ): Rotaciones de los ejes. Si los ángulos son pequeños… X2 = ΔX+ (1 + μ) RG X1. X2 = ΔX + (1 + μ)(I + dθ)X1.")
19
Cada sistema de 3 ecuaciones responde a una sola estación, por lo tanto se necesitan mínimo 3 estaciones en común para resolver los 7 parámetros. Las diferencias entre las coordenadas de los 2 sistemas involucrados serán considerados no homogéneos, producto de la observación y serán compensados mediante un ajuste de Mínimos Cuadrados. Resolución del sistema Sistema de ecuaciones: siendo Si se quiere la inversa:

20
Para 3 puntos, la matriz de diseño tendrá el siguiente aspecto:
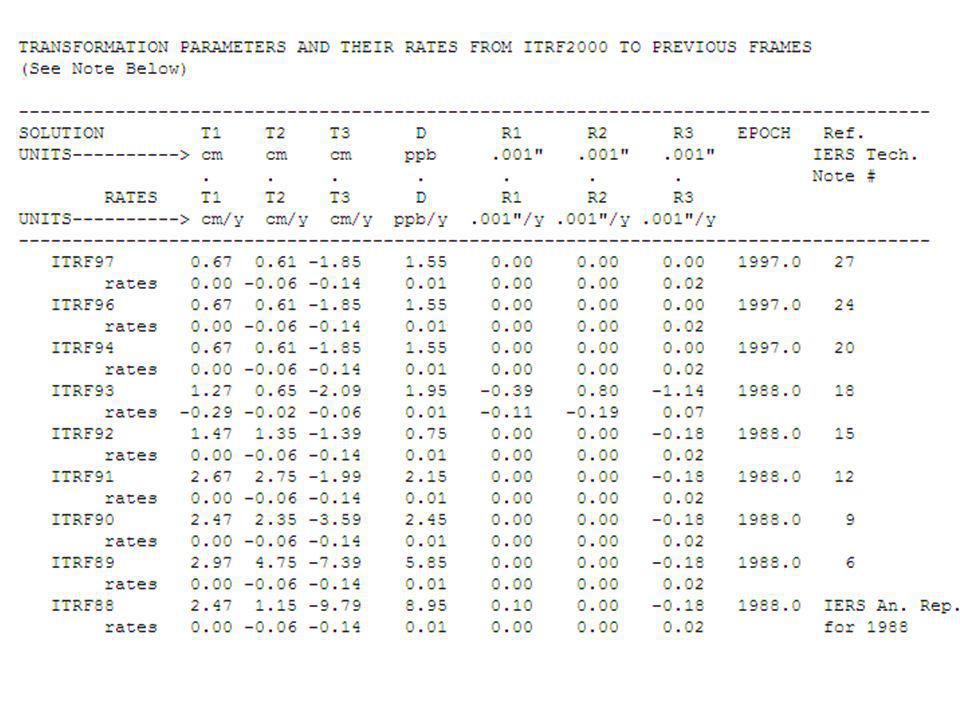
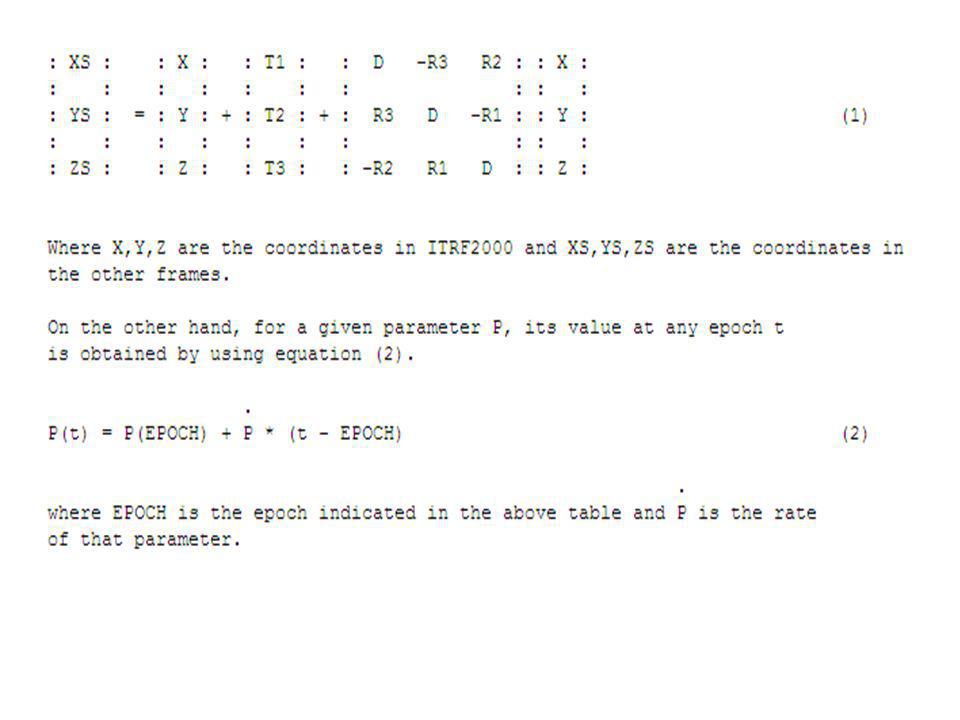
= Si se considera además la evolución temporal, la matriz A será de 14 columnas y se determinarán 14 parámetros, es decir: Los 7 de Helmert más sus velocidades.

23
Technical Note 32, IERS Drewes & Sanchez, Sistemas de Referencia en Geodesia.
Presentaciones similares






 REYNALDO SANCHEZ INSTRUCTOR>")

>")






: Ángulo que forma el plano del ecuador terrestre.>")



