Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Soluciones Numéricas de Ecuaciones Diferenciales ordinarias
CÁPITULO 6

2
Contenidos 6.1 Método de Euler y Análisis de Error 6.2 Métodos de Runge-Kutta 6.3 Métodos de Varios Pasos 6.4 Ecuaciones de Orden Superior y Sistemas 6.5 problemas de Valores en al Frontera de Segundo Orden

3
6.1 Método de Euler y Análisis de Error
Introducción Recuerde la estructura del Método de Euler yn+1 = yn + hf(xn, yn) (1) Errores en Métodos Numéricos Una fuente de error que siempre está presente en los cálculos es el error de rondeo.
 (1) Errores en Métodos Numéricos Una fuente de error que siempre está presente en los cálculos es el error de rondeo.")
4
Errores de Truncamiento para el Método de Euler
Este logaritmo sólo da una aproximación en línea recta a la solución. Este error se llama error de truncamiento local, o error de discretización. Para obtener una fórmula para el error de truncamiento local del método de Euler, usamos la fórmula de Taylor con resido Donde c es un punto entre a y x.

5
Tomando k = 1, a = xn, x = xn+1 = xn + h, tenemos. ó
Tomando k = 1, a = xn, x = xn+1 = xn + h, tenemos ó De ahí que el error de truncamiento en yn+1 es donde xn < c < xn+1 El valor de c por lo común no se conoce, pero una cota superior es donde

6
Observación: Se dice que e(h) es de orden hn, representado con O(hn), si existe una constante C tal que |e(h)| Chn para h suficientemente pequeña.
 es de orden hn, representado con O(hn), si existe una constante C tal que |e(h)| Chn para h suficientemente pequeña.")
7
Ejemplo 1 Determine una cota para los errores de truncamiento local del método de Euler aplicado a Solución De la solución tenemos so En particular, para h = 0.1, se puede obtener una cota superior remplazando c por 1.1 es

8
Ejemplo 1 (2) Al hacer 5 pasos, remplazando c por 1.5, se obtiene (2)
 Al hacer 5 pasos, remplazando c por 1.5, se obtiene (2)")
9
Método de Euler Mejorado
(3) donde (4) se conoce comunmente como el Método de Euler Mejorado. Fig 6.1 En general, el método de Euler mejorado es un ejemplo de método de predictor y corrector.
 donde (4) se conoce comunmente como el Método de Euler Mejorado. Fig 6.1. En general, el método de Euler mejorado es un ejemplo de método de predictor y corrector.")
10
Fig 6.1

11
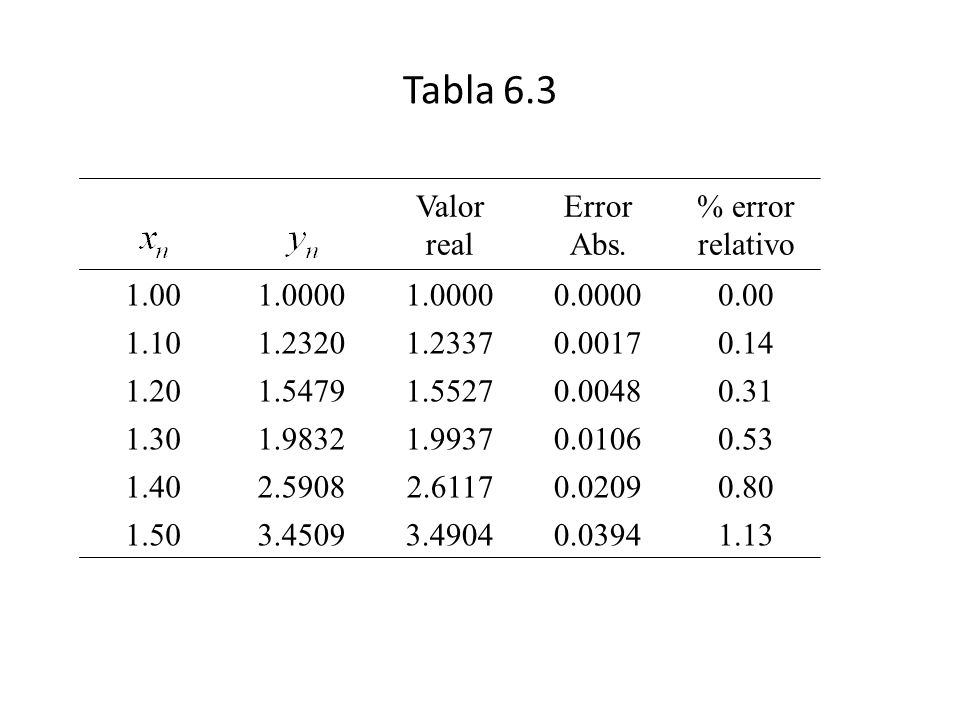
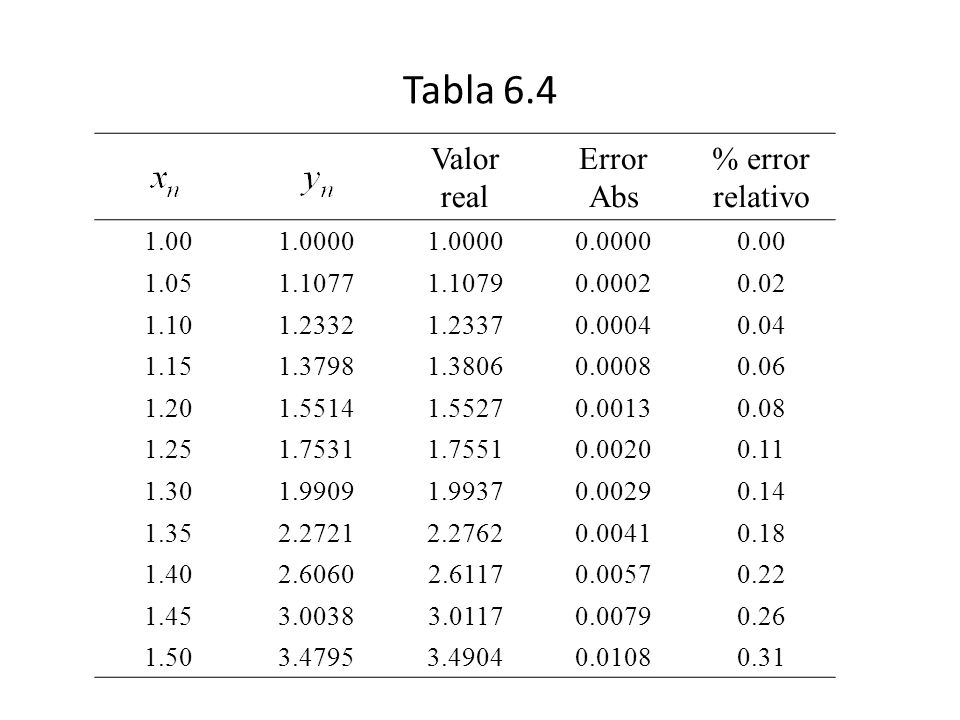
Ejemplo 2 Use el método de Euler mejorado para obtener el valor aproximado de y(1.5) para la solución de Compare los resultados para h = 0.1 y h = 0.05. Solución Con x0 = 1, y0 = 1, f(xn, yn) = 2xnyn , h = 0.1 y1* = y0 + (0.1)(2xy) = 1.2 Usando (3) con x1 = 1 + h = Los resultados se dan en la Tabla 6.3 y 6.4.
 para la solución de . Compare los resultados para h = 0.1 y h = Solución Con x0 = 1, y0 = 1, f(xn, yn) = 2xnyn , h = 0.1 y1* = y0 + (0.1)(2xy) = 1.2 Usando (3) con x1 = 1 + h = 1.1 Los resultados se dan en la Tabla 6.3 y 6.4.")
12
Tabla 6.3 Valor real Error Abs. % error relativo 1.00 1.0000 0.0000
1.10 1.2320 1.2337 0.0017 0.14 1.20 1.5479 1.5527 0.0048 0.31 1.30 1.9832 1.9937 0.0106 0.53 1.40 2.5908 2.6117 0.0209 0.80 1.50 3.4509 3.4904 0.0394 1.13
13
Tabla 6.4 Valor real Error Abs % error relativo 1.00 1.0000 0.0000
1.05 1.1077 1.1079 0.0002 0.02 1.10 1.2332 1.2337 0.0004 0.04 1.15 1.3798 1.3806 0.0008 0.06 1.20 1.5514 1.5527 0.0013 0.08 1.25 1.7531 1.7551 0.0020 0.11 1.30 1.9909 1.9937 0.0029 0.14 1.35 2.2721 2.2762 0.0041 0.18 1.40 2.6060 2.6117 0.0057 0.22 1.45 3.0038 3.0117 0.0079 0.26 1.50 3.4795 3.4904 0.0108 0.31
14
Errores de Truncamiento para el Método Mejorado de Euler Observe que el error de truncamiento local es O(h3).
.")
15
6.2 Runge-Kutta Methods Métodos de Runge-Kutta Todos los métodos de Runge-Kutta son generalizaciones de la fórmula básica de Euler, en la que la función pendiente f se remplaza por un promedio ponderado de pendientes en el intervalo xn x xn (1) donde las ponderaciones wi, i = 1, 2, …, m son constantes que satisfacen w1 + w2 + … + wm = 0, y ki es la función evaluada en un punto seleccionado (x, y) para el cual xn x xn+1.
 donde las ponderaciones wi, i = 1, 2, …, m son constantes que satisfacen w1 + w2 + … + wm = 0, y ki es la función evaluada en un punto seleccionado (x, y) para el cual xn x xn+1.")
16
El número m se llama el orden
El número m se llama el orden. Si tomamos m = 1, w1 = 1, k1 = f(x, yn), llegamos al método de Euler. Por consiguiente, se dice que el método de Euler es un método de Runge-Kutta de primer orden.
, llegamos al método de Euler. Por consiguiente, se dice que el método de Euler es un método de Runge-Kutta de primer orden.")
17
Método de Runge-Kutta de Segundo Orden
Tratamos de hallar unas constantes de modo que la fórmula (2) donde k1= f(xn, yn), k2= f(xn+h, yn+hk1) concuerde con un polinomio de Taylor de grado 2. Las constantes deben satisfacer (3) luego (4) donde w2 0.
 donde k1= f(xn, yn), k2= f(xn+h, yn+hk1) concuerde con un polinomio de Taylor de grado 2. Las constantes deben satisfacer (3) luego (4) donde w2 0.")
18
Ejemplo: escogemos w2 = ½ , de donde w1 = ½ , = 1, = 1, y (2) se transforma en yn+1= yn+(k1+ k2)h/2 donde k1= f(xn, yn), k2= f(xn+h, yn+hk1). Puesto que xn + h = xn+1, yn + hk1 = yn + hf(xn, yn), es idéntica al método de Euler mejorado.
, es idéntica al método de Euler mejorado..")
19
Método de Runge-Kutta de Cuarto Orden
Tratamos de hallar parámetros de modo que la fórmula (5) donde concuerde con un polinomio de Taylor de orden 4.
 donde. concuerde con un polinomio de Taylor de orden 4.")
20
El conjunto de valores usado con más frecuencia para los parámetros produce el siguiente resultado (6)
")
21
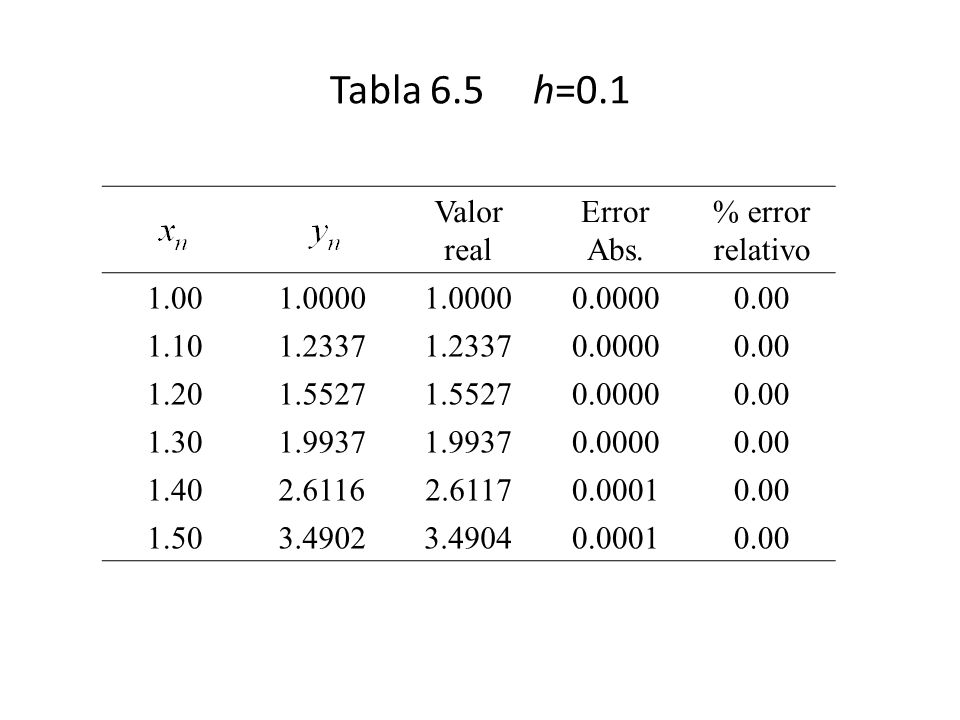
Ejemplo 1 Use el método RK4 con h = 0.1 para obtener y(1.5) para la solución de y’ = 2xy, y(1) = 1. Solución Primero se calcula el caso n = 0.

22
Ejemplo 1 (2) Por lo tanto, Véase la Tabla 6.5.
 Por lo tanto, Véase la Tabla 6.5.")
23
Tabla 6.5 h=0.1 Valor real Error Abs. % error relativo 1.00 1.0000
0.0000 0.00 1.10 1.2337 1.20 1.5527 1.30 1.9937 1.40 2.6116 2.6117 0.0001 1.50 3.4902 3.4904
24
En la Tabla 6.6 comparan algunos resultados.
h = 0.1 h = 0.05 xn Euler mejorado RK4 Valor real 1.00 1.0000 1.10 1.2000 1.2320 1.2337 1.05 1.1000 1.1077 1.1079 1.20 1.4640 1.5479 1.5527 1.2155 1.2332 1.30 1.8154 1.9832 1.9937 1.15 1.3492 1.3798 1.3806 1.40 2.2874 2.5908 2.6116 2.6117 1.5044 1.5514 1.50 2.9278 3.4509 3.4902 3.4904 1.25 1.6849 1.7531 1.7551 1.8955 1.9909 1.35 2.1419 2.2721 2.2762 2.4311 2.6060 1.45 2.7714 3.0038 3.0117 3.1733 3.4795 3.4903

25
Errores de Truncamiento para el Método RK4
Como es de grado 4, el error de truncamiento local es O(h5) y el error de truncamiento global es O(h4). Sin embargo, esto no se abarca en este texto.
 y el error de truncamiento global es O(h4). Sin embargo, esto no se abarca en este texto.")
26
Ejemplo 2 Determine una cota para los errores de truncamiento local del método RK4 aplicado a Solución Al calcular la quinta derivada de la solución conocida se obtiene (7) Así con c = 1.5, entonces (7) = La Tabla 6.7 proporciona aproximaciones a la solución del problema de valor inicial en x = 1.5 por el método RK4.
 Así con c = 1.5, entonces (7) = La Tabla 6.7 proporciona aproximaciones a la solución del problema de valor inicial en x = 1.5 por el método RK4.")
27
Tabla 6.7 h Aproximación Error 0.1 3.49021064 1.32321089 10-4 0.05
10-6

28
6.3 Métodos de Varios Pasos
Método de Adams-Bashforth-Moulton El predictor es la fórmula de Adams-Bashforth (1) donde n 3.
 donde n 3.")
29
El valor de yn+1* se sustituye en el corrector de Adams-Moulton (2)
")
30
Ejemplo 1 Use el método anterior con h = 0.2 para obtener y(0.8) para la solución de Solución Con h = 0.2, y(0.8) se aproxima mediante y4. En principio s emplea el método RK4 con x0 = 0, y0 = 1, h = 0.2 para obtener y1 = , y2 = , y3 =
 se aproxima mediante y4. En principio s emplea el método RK4 con x0 = 0, y0 = 1, h = 0.2 para obtener y1 = , y2 = , y3 =")
31
Ejemplo 1 (2) Ahora con x0 = 0, x1 = 0.2, x3 = 0.4, x4 = 0.6, y f(x, y) = x + y – 1, hallamos El predictor (1) da
 Ahora con x0 = 0, x1 = 0.2, x3 = 0.4, x4 = 0.6, y f(x, y) = x + y – 1, hallamos El predictor (1) da.")
32
Ejemplo 1 (3) Para usar el corrector (2), se necesita
 Para usar el corrector (2), se necesita")
33
Estabilidad de Métodos Numéricos
Decimos que un método numérico es estable, si cambios pequeños en la condición inicial dan como resultado sólo cambios pequeños en la solución calculada.

34
6.4 Ecuaciones de Orden Superor y Sistemas
PVI de Segundo Orden Una PVI (1) puede expresarse como (2) Como y’(x0) = u0, entonces y(x0) = y0, u(x0) = u0. Aplicando el método de Euler (2) (3)
 puede expresarse como (2) Como y’(x0) = u0, entonces y(x0) = y0, u(x0) = u0. Aplicando el método de Euler (2) (3)")
35
Mientras que al aplicar el método RK4: (4) donde
En general,

36
Ejemplo 1 Use el método de Euler para obtener y(0.2), donde (5) Solución Sea y’ = u, entonces (5) se transforma en De (3)
, donde (5) Solución Sea y’ = u, entonces (5) se transforma en De (3)")
37
Ejemplo 1 (2) Usando h = 0.1, y0 = 1, u0 = 2, determinamos
 Usando h = 0.1, y0 = 1, u0 = 2, determinamos")
38
Fig 6.2 En la Fig 6.2 se compara la curva solución generada mediante el método de Euler con la curva solución generada mediante el método RK4.

39
Ejemplo 2 Escribir como un sistema de ecuaciones diferenciales de primer orden. Solución Escribimos Al simplificar:

40
Ejemplo 2 (2) Sea El sistema original se puede escribir en la forma
 Sea El sistema original se puede escribir en la forma")
41
Solución Numérica de un Sistema
La solución de un sistema de la forma se puede aproximar mediante métodos numéricos.

42
Por ejemplo, mediante el método RK4: (6) se parece a esto: (7)
 se parece a esto: (7)")
43
donde (8)
")
44
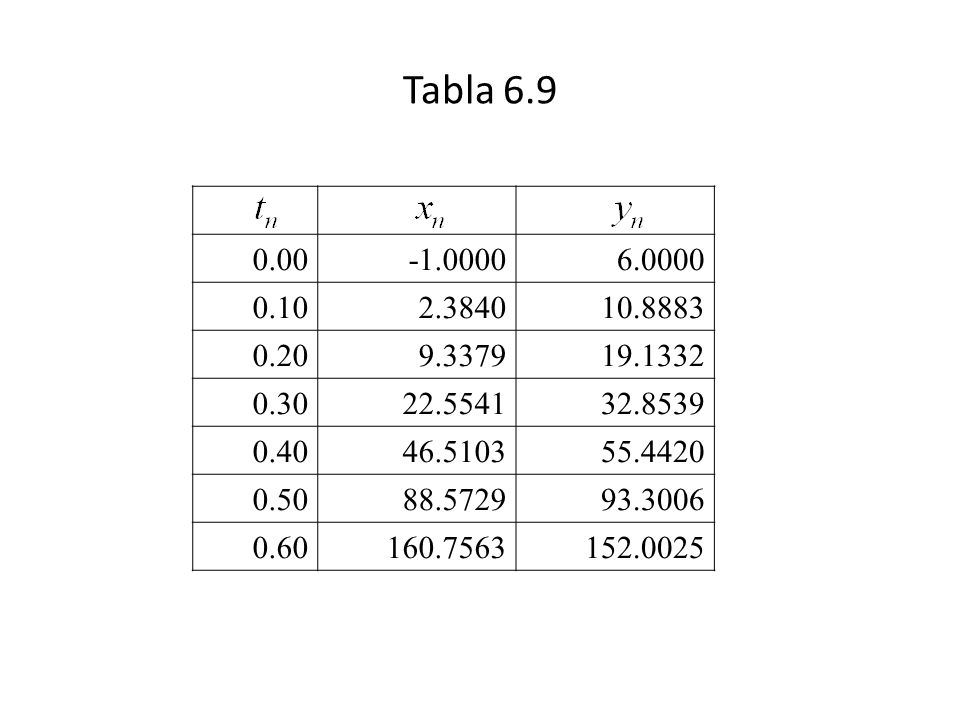
Ejemplo 3 Considere Use el método RK4 para aproximar x(0.6) y y(0.6) con h = 0.2 y h = 0.1. Solución Con h = 0.2 y los datos proporcionados, de (8)
")
45
Ejemplo 3 (2)
")
46
Ejemplo 3 (3) Por lo tanto, de (7) obteenmos Observe Fig 6.3 y Tabla 6.8, 6.9.
 Por lo tanto, de (7) obteenmos Observe Fig 6.3 y Tabla 6.8, 6.9.")
47
Fig 6.3

48
Tabla 6.8 0.00 6.0000 0.20 9.2453 0.40 0.60

49
Tabla 6.9 0.00 6.0000 0.10 2.3840 0.20 9.3379 0.30 0.40 0.50 0.60
50
6.5 Problemas de Valores en la Frontera de Segundo Orden
Aproximaciones por Diferencias Finitas El desarrollo en serie de Taylor en a de y(x) es Si ponemos h = x – a, entonces Escribiendo la última expresión como (1) y (2)
 es Si ponemos h = x – a, entonces Escribiendo la última expresión como (1) y (2)")
51
Si h es pequeña, podemso despreciar y” y términos de orden mayor, luego (3) (4) Al restar (1) de (2) se obtiene también (5) Si despreciamos los términos con h3 y superores, entonces al sumar (1) y (2) (6)
 (4) Al restar (1) de (2) se obtiene también (5) Si despreciamos los términos con h3 y superores, entonces al sumar (1) y (2) (6)")
52
Los lados derechos de (3), (4), (5), (6) se denominan cocientes de diferencias, y estas diferencias se llaman diferencias finitas. y(x + h) – y(x) : diferencia hacia delante y(x) – y(x – h) : diferencia hacia atrás y(x + h) – y(x – h): diferencia central y(x + h) – 2y(x) + y(x – h): diferencia central
 – y(x) : diferencia hacia delante y(x) – y(x – h) : diferencia hacia atrás y(x + h) – y(x – h): diferencia central y(x + h) – 2y(x) + y(x – h): diferencia central.")
53
Método de Diferencias Finitas
Considere el PVF: (7) Supongase que a = x0 < x1 < … < xn < b representa una partición regular del intervalo [a, b], esto es, xi = a + ih, donde i = 0, 1, 2, ..., n, y h = (b – a)/n. Estos puntos se llaman puntos de malla interiores. Si permitimos que sea yi = y(xi), Pi = P(xi), Qi = Q(xi), fi = f(xi),
 Supongase que a = x0 < x1 < … < xn < b representa una partición regular del intervalo [a, b], esto es, xi = a + ih, donde i = 0, 1, 2, ..., n, y h = (b – a)/n. Estos puntos se llaman puntos de malla interiores. Si permitimos que sea yi = y(xi), Pi = P(xi), Qi = Q(xi), fi = f(xi),")
54
y si y’ e y” en (7) se remplazan por (5) y (6), entonces tenemos. ó
y si y’ e y” en (7) se remplazan por (5) y (6), entonces tenemos ó (8) Esto se conoce como ecuación de diferencias finitas.
 se remplazan por (5) y (6), entonces tenemos ó (8) Esto se conoce como ecuación de diferencias finitas.")
55
Ejemplo 1 Use (8) con n = 4 para aproximar la solución del PVF Solución Tenemos P = 0, Q = –4, f(x) = 0, h = (1 – 0)/4 = ¼ . De ahí que (9) Los puntos interiores son x1= 0 + 1/4, x2= 0 + 2/4, x3= 0 + 3/4, entonces (9) genera
 = 0, h = (1 – 0)/4 = ¼ . De ahí que (9) Los puntos interiores son x1= 0 + 1/4, x2= 0 + 2/4, x3= 0 + 3/4, entonces (9) genera.")
56
Ejemplo (2) Junto con y0 = 0, y4 = 5, luego Obtenemos y1 = , y2 = , y3 =
 Junto con y0 = 0, y4 = 5, luego Obtenemos y1 = , y2 = , y3 =")
57
Ejemplo 2 Use (8) con n = 10 para aproximar la solución del PVF
Solución Tenemos P = 3, Q = 2, f(x) = 4x2, h = (2 – 1)/10 = 0.1, de ahí que (8) se transforma (10) Los puntos interiores x1= 1.1, x2= 1.2, …, x9= 1.9, y0 = 1, y10 = 6, luego (10) genera
 = 4x2, h = (2 – 1)/10 = 0.1, de ahí que (8) se transforma (10) Los puntos interiores x1= 1.1, x2= 1.2, …, x9= 1.9, y0 = 1, y10 = 6, luego (10) genera.")
58
Ejemplo 2 (2) Podemos resolver este sistema de ecuaciones para obtener y1, y2, …, y9.
 Podemos resolver este sistema de ecuaciones para obtener y1, y2, …, y9.")
59
Método de Disparos Otra manera de aproximar una solución se denomina método de disparos. El punto de partida de este método es remplazar el PVF por un PVI: (11) donde m1 es simplemente una suposición. Esto se deja como ejercicio. Mirese el problema 14.
 donde m1 es simplemente una suposición. Esto se deja como ejercicio. Mirese el problema 14.")
Presentaciones similares













 donde v 0, y x = 0 es un punto singular regular de (1). Las soluciones de (1) se.>")

, y(x0) = y0 (1) posee una solución. por ejemplo,>")



