Descargar la presentación
La descarga está en progreso. Por favor, espere

1
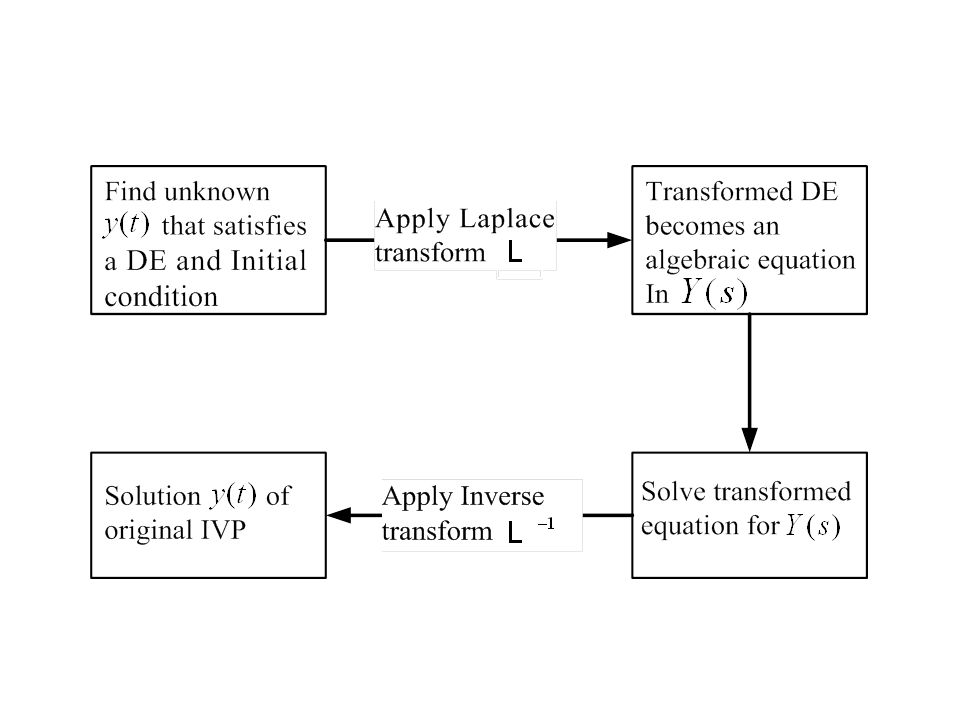
La Transformada de Laplace
CAPÍTULO 4 ※Read Me First

2
Contenidos 4.1 Definición de la transformada de Laplace
4.2 Transformadas inversas y transformadas de derivadas 4.3 Propiedades operacionales 4.4 Propiedades operacionales adicionales 4.5 La función delta de Dirac 4.6 Sistemas de ecuaciones diferenciales lineales

3
4.1 Definición de la Transformada de Laplace
Definición básica Si f(t) está definida para t 0, entonces (1) Si f(t) está definida para t 0, entonces (2) es la Transformada de Laplace de f. EDFINICIÓN 4.1 Transformada de Laplace
 está definida para t 0, entonces (1) Si f(t) está definida para t 0, entonces (2) es la Transformada de Laplace de f. EDFINICIÓN 4.1. Transformada de Laplace.")
4
Ejemplo 1 Evaluar L{1} Solución: Aquí tenemos en cuenta que los límites de integración son 0 y . De la definición Como e-st 0 cuando t , para s > 0.

5
Ejemplo 2 Evaluar L{t} Solución

6
Ejemplo 3 Evaluar L{e-3t} Solución

7
Ejemplo 4 Evaluar L{sin 2t} Solución

8
Ejemplo 4 (2) Transformada de Laplace de sin 2t ↓
 Transformada de Laplace de sin 2t ↓")
9
T.L. is Linear Podemos comprobar fácilmente que (3)
")
10
Transformadas de algunas
(b) (c) (d) (e) (f) (g) TEOREMA 4.1 Transformadas de algunas Funciones básicas
 (c) (d) (e) (f) (g) TEOREMA 4.1. Transformadas de algunas. Funciones básicas.")
11
Se dice que f(t) es de orden exponencial,
EDFINICIÓN 4.2 Se dice que f(t) es de orden exponencial, Si existen constantes c, M > 0, y T > 0, tales que |f(t)| Mect para todo t > T. Fig 4.1, 4.2. Orden Exponencial
 es de orden exponencial, Si existen constantes c, M > 0, y T > 0, tales que. |f(t)| Mect para todo t > T. Fig 4.1, 4.2. Orden Exponencial.")
12
Fig 4.1

13
Fig 4.2

14
Eejmplos Fig 4.3

15
Fig 4.4 Una función como no es de orden exponencial, observe Fig 4.4

16
Condiciones Suficientes
TEOREMA 4.2 Si f(t) una función continua por partes en [0, ) y de orden exponencial c, entonces existe L{f(t)} para s > c. Condiciones Suficientes para la Existencia
 una función continua por partes en [0, ) y de. orden exponencial c, entonces existe L{f(t)} para s > c. Condiciones Suficientes. para la Existencia.")
17
Ejemplo 5 Hallar L{f(t)} para Solución
} para Solución")
18
4.2 Transformadas inversas y Transformadas de derivadas
TEOREMA 4.3 (a) (b) (c) (d) (e) (f) (g) Algunas transformadas inversas
 (b) (c) (d) (e) (f) (g) Algunas transformadas inversas.")
19
Ejemplo 1 Hallar las transformadas inversas de (a) (b)
Solución (a) (b)
 (b)")
20
L -1 también es lineal Podemso comprobar fácilmente que (1)
")
21
Ejemplo 2 Hallar Solución (2)
")
22
Ejemplo 3 Hallar Solución Usando fracciones parciales
Luego (3) Si ponemos s = 1, 2, −4, entonces
 Si ponemos s = 1, 2, −4, entonces.")
23
Ejemplo 3 (2) (4) Así (5)
 (4) Así (5)")
24
Transformadas de Derivadas
(6) (7) (8)
 (7) (8)")
25
Si son continuas en [0, ) y son de
TEOREMA 4.4 Si son continuas en [0, ) y son de orden exponencial y si f(n)(t) es continua por partes en [0, ), entonces donde Transformada de una derivada
 y son de. orden exponencial y si f(n)(t) es continua por partes en. [0, ), entonces donde. Transformada de una derivada.")
26
Solución de EDO lineales
Luego (9) (10)
 (10)")
27
Tenemos (11) donde
 donde")
29
Ejemplo 4 Resolver Solución (12) (13)
 (13)")
30
Ejemplo 4 (2) Podemos hallar A = 8, B = −2, C = 6 Así
 Podemos hallar A = 8, B = −2, C = 6 Así")
31
Ejemplo 5 Resolver Solución (14) Así
 Así")
32
4.3 Propiedades operacionales
TEOREMA 4.5 Si f continua por partes en [0, ) y de orden exponencial, entonces lims L{f} = 0. Comportamiento de F(s) cuando s → Demostración
 y de. orden exponencial, entonces lims L{f} = 0. Comportamiento de F(s) cuando s → Demostración.")
33
TEOREMA 4.6 Si L{f} = F(s) y a cualquier número real, entonces L{eatf(t)} = F(s – a), Fig 4.10. Primer teorema de traslación Demostración L{eatf(t)} = e-steatf(t)dt = e-(s-a)tf(t)dt = F(s – a)
} = e-steatf(t)dt = e-(s-a)tf(t)dt = F(s – a)")
34
Fig 4.10

35
Ejemplo 1 Hallar las T.L. de (a) (b) Solución (a) (b)
 (b) Solución (a) (b)")
36
Forma inversa del Teorema 4.6
(1) donde
 donde.")
37
Ejemplo 2 Hallar la T.L. inversa de (a) (b)
Solución (a) teenmos A = 2, B = (2)
 teenmos A = 2, B = 11 (2)")
38
Ejemplo 2 (2) And (3) De (3), tenemos (4)
 And (3) De (3), tenemos (4)")
39
Ejemplo 2 (3) (b) (5) (6) (7)
 (b) (5) (6) (7)")
40
Ejemplo 3 Resolver Solución

41
Ejemplo 3 (2) (8)
 (8)")
42
Ejemplo 4 Resolver Solución

43
Ejemplo 4 (2)
")
44
La función escalón unitaria U(t – a) se define como
EDFINICIÓN 4.3 La función escalón unitaria U(t – a) se define como Función escalón unitario Fig 4.11.
 se define como. Función escalón unitario. Fig")
45
Fig 4.11

46
Fig Fig 4.13 Fig 4.12 muestra la gráfica de (2t – 3)U(t – 1). Considerando la Fig 4.13, es la misma que f(t) = 2 – 3U(t – 2) + U(t – 3)
 = 2 – 3U(t – 2) + U(t – 3) .")
47
También una función del tipo. (9) es la misma que
También una función del tipo (9) es la misma que (10) De manera similar, una función del tipo (11) puede escribirse como (12)
 es la misma que (10) De manera similar, una función del tipo (11) puede escribirse como (12)")
48
Ejemplo 5 Expresar en términos de U(t). Fig 4.14.
Solución De (9) y (10), con a = 5, g(t) = 20t, h(t) = 0 f(t) = 20t – 20tU(t – 5)
 y (10), con a = 5, g(t) = 20t, h(t) = 0 f(t) = 20t – 20tU(t – 5)")
49
Fig 4.14

50
Cosidere la función (13) Fig 4.15.
 Fig 4.15.")
51
Fig 4.15

52
TEOREMA 4.7 Si F(s) = L{f}, y a > 0, entonces L{f(t – a)U(t – a)} = e-asF(s) Segundo teorema de traslación Demostración

53
Sea v = t – a, dv = dt, entonces Si f(t) = 1, entonces f(t – a) = 1, F(s) = 1/s, (14) por ejemplo: La T.L. de la Fig 4.13 es

54
Forma inversa del Teorema 4.7
(15)
")
55
Ejemplo 6 Hallar la T.L. inversa de (a) (b) Solución (a) luego
(b) luego
 luego.")
56
Forma alternativa del Teorema 4.7
Como , entonces Lo anterior se puede resolver. Sin embargo, lo enfocamos de otra manera. Sea u = t – a, Esto es, (16)
")
57
Ejemplo 7 Hallar Solución Con g(t) = cos t, a = , entonces g(t + ) = cos(t + )= −cos t Por (16),
 = cos t, a = , entonces g(t + ) = cos(t + )= −cos t Por (16), .")
58
Ejemplo 8 Resolver Solución Hallamos f(t) = 3 cos t U(t −), luego (17)
 = 3 cos t U(t −), luego (17)")
59
Ejemplo 8 (2) Se sigue desde (15) con a = , entonces Así
(18) Fig 4.16
 Fig")
60
Fig 4.16

61
Vigas Recuerde que la ED de una viga es (19) Fig 4.17.
 Fig 4.17.")
62
Fig 4.17

63
Ejemplo 9 Una viga de longitud L se empotra en ambos extremos como se ilustra en la Fig Determine la deflexión de la viga cuando la carga está dada por: Solución Tenemos las condiciones en la frontera: y(0) = y(L) = 0, y’(0) = y’(L) = 0. Por (10),
 = y(L) = 0, y’(0) = y’(L) = 0. Por (10),")
64
Ejemplo 9 (2) Transformando (19) en donde c1 = y”(0), c3 = y(3)(0)
 Transformando (19) en donde c1 = y (0), c3 = y(3)(0)")
65
Ejemplo 9 (3) Así
 Así")
66
Ejemplo 9 (4) Aplicamos y(L) = y’(L) = 0, entonces Así
 Aplicamos y(L) = y’(L) = 0, entonces Así")
67
4.4 Propiedades Operacionales Adicionales
Multiplicando una función por tn esto es, De manera similar,

68
Si F(s) = L{f(t)} y n = 1, 2, 3, …, entonces
TEOREMA 4.8 Si F(s) = L{f(t)} y n = 1, 2, 3, …, entonces Derivadas de una transformada
 = L{f(t)} y n = 1, 2, 3, …, entonces. Derivadas de una transformada.")
69
Ejemplo 1 Hallar L{t sen kt}
Solución Con f(t) = sen kt, F(s) = k/(s2 + k2), luego
 = sen kt, F(s) = k/(s2 + k2), luego.")
70
Enfoques diferentes Teorema 4.6: Teorema 4.8:

71
Ejemplo 2 Resolver Solución ó Del ejemplo 1, Así

72
Convolución Un producto especial, f * g se define mediante al integral y se llama convolución de f y g. La convolución es una función de t, por ejemplo: Observación: f * g = g * f

73
Demostración Teorema de convolución TEOREMA 4.9
Si f(t) y g(t) son continuas por partes en [0, ) y de orden exponencial, entonces Teorema de convolución Demostración
 y g(t) son continuas por partes en [0, ) y. de orden exponencial, entonces. Teorema de convolución. Demostración.")
74
manteniendo fija, let t = + , dt = d Se realiza al integración en la región sombreada de la Fig Cambiando el orden de integración:

75
Fig 4.32

76
Ejemplo 3 Hallar Solución Original statement = L{et * sin t}

77
Forma inversa del Teorema 4.9
L-1{F(s)G(s)} = f * g (4) Mire en la tabla del Apéndice III, (5)
G(s)} = f * g (4) Mire en la tabla del Apéndice III, (5)")
78
Ejemplo 4 Hallar Solución Sea entonces

79
Ejemplo 4 (2) Ahora recordamos que sen A sen B = (1/2) [cos (A – B) – cos (A+B)] Si ponemos A = k, B = k(t − ), entonces
![Ejemplo 4 (2) Ahora recordamos que sen A sen B = (1/2) [cos (A – B) – cos (A+B)] Si ponemos A = k, B = k(t − ), entonces.](http://slideplayer.es/slide/1715215/7/images/79/Ejemplo+4+%282%29+Ahora+recordamos+que+sen+A+sen+B+%3D+%281%2F2%29+%5Bcos+%28A+%E2%80%93+B%29+%E2%80%93+cos+%28A%2BB%29%5D+Si+ponemos+A+%3D+k%EF%81%B4%2C+B+%3D+k%28t+%E2%88%92+%EF%81%B4%29%2C+entonces..jpg "Ejemplo 4 (2) Ahora recordamos que sen A sen B = (1/2) [cos (A – B) – cos (A+B)] Si ponemos A = k, B = k(t − ), entonces.")
80
Transformada de una Integral
Cuando g(t) = 1, G(s) = 1/s, entonces
 = 1, G(s) = 1/s, entonces.")
81
Eejmplos:

82
Ecuación Integral de Volterra

83
Ejemplo 5 Resolver Solución Primero, h(t-) = e(t-), h(t) = et. De (9) Resolviendo para F(s) y empleando fracciones parciales
 Resolviendo para F(s) y empleando fracciones parciales.")
84
Circuitos en Serie De la Fig 4.33, tenemos
la cual se llama ecuación integrodiferencial. Fig 4.33

85
Ejemplo 6 Determine i(t) en Fig 4.33, cuando L = 0.1 h, R = 2 , C = 0.1 f, i(0) = 0, y E(t) = 120t – 120tU(t – 1) Solución Usando los datos, (10) se convierte Y entonces
 se convierte Y entonces.")
86
Ejemplo 6 (2)
")
87
Ejemplo 6 (3) Escrita como una función definida por partes: (11)
 Escrita como una función definida por partes: (11)")
88
Fig 4.34

89
Periodic Function f(t + T) = f(t)
Si f(t) is una función periódica con período T, entonces TEOREMA 4.10 Transformada de una función periódoca
 is una función periódica con período T, entonces. TEOREMA Transformada de una función periódoca.")
90
Demostración Use el mismo método de transformación

91
Ejemplo 7 Halle la T. L. de la función en Fig 4.35.
Solución Hallamos T = 2 y Del Teorema 4.10,

92
Fig 4.35

93
Ejemplo 8 La ED (13) Hallar i(t) donde i(0) = 0, E(t) es como ilustar la Fig 4.35. Solución ó (14) Porque y
 Porque y.")
94
Luego i(t) se esribe de la siguiente manera y se ilustra en la Fig 4
 se esribe de la siguiente manera y se ilustra en la Fig 4")
95
Fig 4.36

96
4.5 La función delta de Dirac
Impulso Unitario Observe la Fig 4.43(a). Está función se define por (1) donde a > 0, t0 > 0. Para un valor pequeño de a, a(t – t0) es una función constante de gran magnitud. El comportamiento de a(t – t0) cuando a 0, se llama impulso unitario, porque posee la propiedad Fig 4.43(b).
. Está función se define por (1) donde a > 0, t0 > 0. Para un valor pequeño de a, a(t – t0) es una función constante de gran magnitud. El comportamiento de a(t – t0) cuando a 0, se llama impulso unitario, porque posee la propiedad . Fig 4.43(b).")
97
Fig 4.43

98
La función delta de Dirac
Esta función se define como (t – t0) = lima0 a(t – t0) (2) Las dos propiedades importantes son: (1) (2) , x > t0
 = lima0 a(t – t0) (2) Las dos propiedades importantes son: (1) (2) , x > t0.")
99
Demostración La Transformada de Laplace es
TEOREMA 4.11 Para t0 > 0, Transformación de la función delta de Dirac Demostración La Transformada de Laplace es

100
Cuando a 0, (4) es 0/0. Use la regla de L’Hopital, entonces (4) tiende a 1 cuando a 0. Así , Ahora cuando t0 = 0, tenemos

101
Ejemplo 1 Resolver sujeta a (a) y(0) = 1, y’(0) = 0 (b) y(0) = 0, y’(0) = 0 Solución (a) s2Y – s + Y = 4e-2s Así y(t) = cos t + 4 sen(t – 2)U(t – 2) Como sen(t – 2) = sen t, enonces (5) Fig 4.44.
 s2Y – s + Y = 4e-2s Así y(t) = cos t + 4 sen(t – 2)U(t – 2) Como sen(t – 2) = sen t, enonces (5) Fig")
102
Fig 4.44

103
Ejemplo 1 (2) (b) Así y(t) = 4 sen(t – 2)U(t – 2) y (6)
 (b) Así y(t) = 4 sen(t – 2)U(t – 2) y (6)")
104
Fig 4.45

105
4.6 Sistemas Eds Lineales Resortes acoplados En el ejemplo 1 trabajaremos con (1)
")
106
Ejemplo 1 Use T.L. para resolver (2) donde x1(0) = 0, x1’(0) = 1, x2(0) = 0, x2’(0) = −1. Solución s2X1 – sx1(0) – x1’(0) + 10X1 – 4X2 = 0 −4X1 + s2X2 – sx2(0) – x2’(0) + 4X2 = 0 Recolocando: (s2 + 10)X – 4X2 = −4X1 + (s2 + 4)X2 = −1 (3)
 – x1’(0) + 10X1 – 4X2 = 0 −4X1 + s2X2 – sx2(0) – x2’(0) + 4X2 = 0 Recolocando: (s2 + 10)X1 – 4X2 = 1 −4X1 + (s2 + 4)X2 = −1 (3)")
107
Ejemplo 1 (2) Resolviendo (3) para X1: Usamos X1(s) para obtener X2(s)
 Resolviendo (3) para X1: Usamos X1(s) para obtener X2(s)")
108
Ejemplo 1 (3) Luego (4)
 Luego (4)")
109
Redes De la Fig 4.47, tenemos (5)
")
110
Fig 4.47

111
Ejemplo 2 Resolver (5) donde E(t) = 60 V, L = 1 h, R = 50 ohm,
C = 10-4 f, i1(0) = i2(0) = 0. Solución Tenemos Entonces sI1(s) + 50I2(s)= 60/s −200I1(s) + (s + 200)I2(s)= 0
 = i2(0) = 0. Solución Tenemos Entonces sI1(s) + 50I2(s)= 60/s −200I1(s) + (s + 200)I2(s)= 0.")
112
Ejemplo 2 (2) Resolviendo lo anterior: Así
 Resolviendo lo anterior: Así")
113
Péndulo Doble De la Fig 4.48, tenemos (6)
")
114
Fig 4.48

115
Ejemplo 3 Compruebe que cuando la solución de (6) es (7) Fig 4.49
 es (7) Fig 4.49")
116
Fig 4.49

Presentaciones similares