Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Proyección estereográfica

2
DEFINICIÓN DE LA PROYECCIÓN ESTEREOGRÁFICA
Proyección que se obtiene proyectando el globo sobre un plano mediante un foco situado en el polo opuesto del punto de contacto del globo con el plano de proyección. Tanto los meridianos como los paralelos son círculos. La deformación aumenta simétricamente hacia el exterior a partir del punto central. Tiene una sola propiedad: todos los círculos en el globo aparecen como círculos en la proyección.

3
¿En que se utiliza? Se usa en los mapamundis que se representan los dos hemisferios, en los mapas de estrellas y en los mapas geofísicos (ya que los problemas de trigonometría esférica planteados en él son fáciles de resolver). Es una proyección muy utilizada en las cartas de navegación. De esta proyección se deriva la proyección UPS (proyección universal polar estereográfica).
. Es una proyección muy utilizada en las cartas de navegación. De esta proyección se deriva la proyección UPS (proyección universal polar estereográfica).")
4
Y en el plano complejo…? A veces resulta conveniente añadir al plano z el punto del infinito, denotado por ∞, y usarlo para calcular límites relacionados con él. El plano complejo junto con ese punto se llama plano complejo ampliado. Para visualizar el punto del infinito, podemos pensar en el plano complejo como un plano que pasa por el ecuador de una esfera unidad centrada en el punto z= 0. A cada punto z del plano le corresponde exactamente un punto P de la superficie de la esfera. Ese punto P queda determinado por la intersección con la superficie esférica de la recta que pasa por z y por el polo norte de la esfera. Recíprocamente, a cada punto P de la superficie esférica, distinto del polo norte, le corresponde exactamente un punto z en el plano. A la esfera se le llama esfera de Riemann y la correspondencia así definida se llama proyección estereográfica, que ya la hemos definido.

5
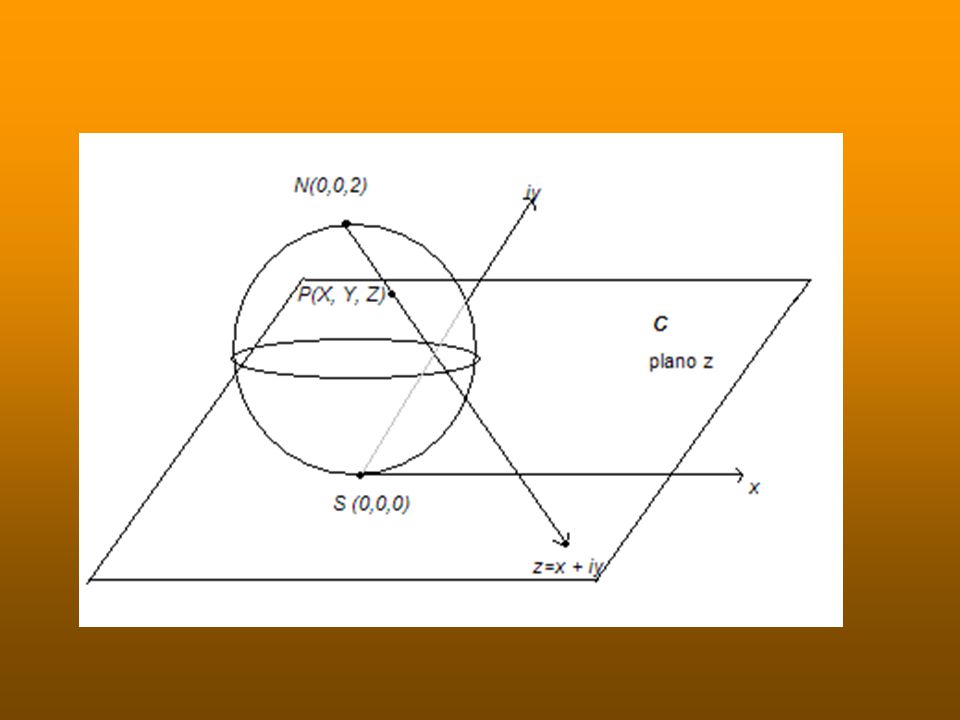
¿En que consiste? Consideraremos una esfera unitaria arriba del plano complejo con el polo sur de la esfera localizado en el origen del plano z. Se verá a continuación como extender el plano complejo a la superficie de una esfera cuyo polo sur corresponde al origen y su polo norte corresponde al punto z infinito. Todos los demás puntos del plano complejo pueden ser mapeados de una colección de uno a uno en la superficie de la esfera usando la siguiente construcción. Conectaremos el punto z en el plano con el polo norte usando una línea recta. Esta línea interfecta a la esfera al punto P, y de esta manera cada punto z(=x+iy)en el plano complejo corresponde únicamente al punto P en la superficie de la esfera.
en el plano complejo corresponde únicamente al punto P en la superficie de la esfera.")
7
Ahora tenemos que el punto P : (X, Y, Z) en la esfera corresponde con el punto z=x + iy en el plano complejo buscando en la superficie de la esfera, (X, Y, Z), el punto de intersección de la línea desde el polo norte de la esfera, N : (0, 0, 2), al punto z= x + iy en el plano. La construcción es como sigue. Consideramos tres puntos en las tres dimensiones: N = (0, 0, 2): polo norte P = (X, Y, Z): punto en la esfera C= (x, y, 0):punto en el plano complejo Como ambos son puntos de una línea, de ahí que la diferencia de los puntos P-N debe ser un múltiplo escalar de la diferencia C– N, llamada (X, Y, Z – 2)= s(x, y, -2)
: polo norte. P = (X, Y, Z): punto en la esfera. C= (x, y, 0):punto en el plano complejo. Como ambos son puntos de una línea, de ahí que la diferencia de los puntos P-N debe ser un múltiplo escalar de la diferencia C– N, llamada. (X, Y, Z – 2)= s(x, y, -2)")
8
Donde s es un número real. La ecuación de la esfera dada por
X2 + Y2 +(Z-1)2= 1 Entonces, implica que X = sx, Y = sy Z=2-2s Sustituyendo estos en la ecuación de la esfera: S2(x2 +y2 +4) – 4s = 0 La cual solamente tiene la solución no trivial,
2= 1. Entonces, implica que. X = sx, Y = sy Z=2-2s. Sustituyendo estos en la ecuación de la esfera: S2(x2 +y2 +4) – 4s = 0. La cual solamente tiene la solución no trivial,")
9
Donde = x2 +y2. De aquí, dado un punto z= x + iy en el plano, tendremos en la esfera la única correspondencia: Y vemos que bajo este mapeo, el origen del plano complejo z=0 es el polo sur de la esfera (0, 0, 0) y todos los puntos en ∞ es el polo norte (0, 0, 2). Y así, teniendo un punto P = (X; Y, Z) podemos encontrar su única imagen en el plano complejo, es decir: y
 y todos los puntos en ∞ es el polo norte (0, 0, 2). Y así, teniendo un punto P = (X; Y, Z) podemos encontrar su única imagen en el plano complejo, es decir: y.")
10
Proyectando círculos y rectas
La proyección estereográfica mapea cualquier conjunto de puntos en el plano complejo con su correspondiente conjunto de puntos en la esfera y viceversa. Por ejemplo, la imagen de un círculo arbitrario en el plano, es un círculo en la esfera que no pasa por el polo norte. Similarmente, una línea recta corresponde a un círculo pasando a través del polo norte. Aquí un círculo en la esfera corresponde al conjunto de puntos denotando la intersección de la esfera con algún plano: AX+ BY+ CZ = D, A, B, C, D constantes. De aquí que en la esfera las imágenes de una línea recta y de círculos no son realmente geométricamente diferentes de otras. Más que eso, las imágenes de la esfera de dos líneas rectas no paralelas en el plano intersecta a dos puntos en la esfera, una de las cuales está el punto en el infinito. En este marco, líneas paralelas son círculos que se tocan en el punto infinito (polo norte); y entonces la geometría Euclideana se pierde.
; y entonces la geometría Euclideana se pierde.")
11
Círculo y línea recta

12
Líneas paralelas

13
Conviene calcular su expresión en coordenadas
Conviene calcular su expresión en coordenadas. Por simplicidad supondremos que la esfera tiene radio 1. Dado uno de sus puntos P = (x, y, z) que no sea el polo norte, la recta que lo une con N es (0, 0, 1) + λ(x, y, z − 1), λ R. El valor de λ que hace que este punto esté en π es el que cumple 1+λ(z−1) = 0, o sea, λ = 1/(1 − z). El punto de corte es Pc= ( x/1 − z, y/1 − z, 0) Así pues, si tomamos como sistema de referencia en π el formado por O y los dos primeros vectores de la base del sistema de referencia de E, la expresión en coordenadas de la proyección estereográfica es f(x, y, z) = (x/1 − z, y/1 − z)
 que no. sea el polo norte, la recta que lo une con N es. (0, 0, 1) + λ(x, y, z − 1), λ R. El valor de λ que hace que este punto esté en π es el que cumple. 1+λ(z−1) = 0, o sea, λ = 1/(1 − z). El punto de corte es. Pc= ( x/1 − z, y/1 − z, 0) Así pues, si tomamos como sistema de referencia en π el formado por O y. los dos primeros vectores de la base del sistema de referencia de E, la expresión en coordenadas de la proyección estereográfica es. f(x, y, z) = (x/1 − z, y/1 − z)")
14
g(a, b) = (2a/a2 + b2 + 1,2b/a2 + b2 + 1,a2 + b2 − 1/a2 + b2 + 1)
También es fácil obtener una expresión para la inversa. Dado un punto Pc = (a, b) en π, la recta que pasa por N y Pc es (0, 0, 1) + λ(a, b,−1), λ∈ R, y los puntos de esta forma que están en la esfera son los que cumplen (λa)2 + (λb)2 + (1 − λ)2 = 1, lo que implica que o bien λ = 0 (que corresponde al polo norte) o bien λ = 2/a2 + b2 + 1, que corresponde al punto g(a, b) = (2a/a2 + b2 + 1,2b/a2 + b2 + 1,a2 + b2 − 1/a2 + b2 + 1)
 en π, la recta que pasa por N y Pc es. (0, 0, 1) + λ(a, b,−1), λ∈ R, y los puntos de esta forma que están en la esfera son los que cumplen. (λa)2 + (λb)2 + (1 − λ)2 = 1, lo que implica que o bien λ = 0 (que corresponde al polo norte) o bien. λ = 2/a2 + b2 + 1, que corresponde al punto. g(a, b) = (2a/a2 + b2 + 1,2b/a2 + b2 + 1,a2 + b2 − 1/a2 + b2 + 1)")
15
Esfera con las rectas y las circunferencias de R2 ∪ {∞}. Demostración:
Teorema 11.2 La proyección estereográfica biyecta las circunferencias de la Esfera con las rectas y las circunferencias de R2 ∪ {∞}. Demostración: Una circunferencia en la esfera S esta formada por los Puntos que cumplen la ecuación de un plano: Ax + By + Cz + D = 0. La Expresión anterior) nos da entonces que las coordenadas (a, b) de sus imágenes han De cumplir 2Aa + aBb + C(a2 + b2 − 1) + D(a2 + b2 + 1) = 0, o equivalentemente, (C + D)(a2 + b2) + 2Aa + 2Bb + (D − C) = 0.
 nos da entonces que las coordenadas (a, b) de sus imágenes han De cumplir. 2Aa + aBb + C(a2 + b2 − 1) + D(a2 + b2 + 1) = 0, o equivalentemente, (C + D)(a2 + b2) + 2Aa + 2Bb + (D − C) = 0.")
16
Recíprocamente, todos los puntos que cumplen (11
Recíprocamente, todos los puntos que cumplen (11.2) provienen de puntos en la circunferencia dada. Ahora bien, esta última ecuación corresponde a una Circunferencia si C = −D y a una recta si C = −D. Notemos que esto sucede si y sólo si el polo norte (0, 0, 1) está en la circunferencia de partida, luego las Circunferencias que pasan por el polo norte son las que se transforman en rectas, Las cuales contienen, por convenio, la imagen del polo norte. Por otra parte es claro que ajustando A, B, C y D se puede hacer que Los coeficientes de (11.2) tomen cualquier conjunto de valores, luego todas las Circunferencias y todas las rectas del plano son imágenes de circunferencias de La esfera.
 provienen de puntos en. la circunferencia dada. Ahora bien, esta última ecuación corresponde a una. Circunferencia si C = −D y a una recta si C = −D. Notemos que esto sucede. si y sólo si el polo norte (0, 0, 1) está en la circunferencia de partida, luego las. Circunferencias que pasan por el polo norte son las que se transforman en rectas, Las cuales contienen, por convenio, la imagen del polo norte. Por otra parte es claro que ajustando A, B, C y D se puede hacer que. Los coeficientes de (11.2) tomen cualquier conjunto de valores, luego todas las. Circunferencias y todas las rectas del plano son imágenes de circunferencias de. La esfera.")
17
Bibliografía www.matem.unam.mx/aventuras/mapas/estereo1.html
dics/cartografia/proyeccion.htm “Variable compleja y aplicaiones”,J. W. Brown y R. V. Churchill “Complex Variables: Introduction and Aplications”. Mark J. Ablowitz

Presentaciones similares