Descargar la presentación
La descarga está en progreso. Por favor, espere

1
INSTITUTO TECNOLÓGICO SUPERIOR DE CALKINI EN EL ESTADO DE CAMPECHE
CARRERA: INGENIERIA EN INDUSTRIAS ALIMENTARIAS III SEMESTRE ASIGNATURA: MATEMATICAS IV (ALGEBRA LINEAL) UNIDAD 4 ESPACIOS VECTORIALES PROF: ING. GOMEZ KU RICARDO ALUMNO: REYNA CANDELARIA CERVERA ALVARADO SAYLI IVONNE ORDOÑEZ COLLI ISMAEL MAY CANUL CARLOS HUMBERTO PEREA QUEN KIMBERLY BEATRIZ KANTUN CAUICH FREDDY MANUEL KU ZI LIZULY MAGALY SALAYANDIA PERERA CALKINI CAMPECHE
 UNIDAD 4 ESPACIOS VECTORIALES. PROF: ING. GOMEZ KU RICARDO. ALUMNO: REYNA CANDELARIA CERVERA ALVARADO. SAYLI IVONNE ORDOÑEZ COLLI. ISMAEL MAY CANUL. CARLOS HUMBERTO PEREA QUEN. KIMBERLY BEATRIZ KANTUN CAUICH. FREDDY MANUEL KU ZI. LIZULY MAGALY SALAYANDIA PERERA. CALKINI CAMPECHE.")
2
Espacios vectoriales La definición de espacio vectorial involucra un cuerpo arbitrario cuyos elementos se denominan escalares. Se utiliza la siguiente notación. K El cuerpo de escalares ɑ, b, c ó k Los elementos de K V El espacio vectorial dado u, v, w Los elementos de V.

3
Definición: Sean K un cuerpo dado y V un conjunto no vacío, con reglas de suma y producto por un escalar que asignan a cada par u, vϵV una suma u+vϵV y a cada par uϵV, kϵK un producto KuϵV. V recibe el nombre de espacio vectorial sobre K ( y los elementos de V se llaman vectores) y se satisfacen los siguientes axiomas.
 y se satisfacen los siguientes axiomas..")
4
[A1 ] para toda terna de vectores u, v wϵV, ( u+v) + u + (u +w ).
[A2 ] existe un vector en V, denotado por 0 denominado el vector cero, tal que u + 0= u para todo vector uϵV. [A3 ] para todo vector uϵV existe un único vector en V, denotado por -u, tal que u+(-u)=0. [A4 ] para todo par de vectores u, uϵV, u+v=v+u.
![[A1 ] para toda terna de vectores u, v wϵV, ( u+v) + u + (u +w ).](http://slideplayer.es/slide/1614898/5/images/4/%5BA1+%5D+para+toda+terna+de+vectores+u%2C+v+w%CF%B5V%2C+%28+u%2Bv%29+%2B+u+%2B+%28u+%2Bw+%29..jpg "[A2 ] existe un vector en V, denotado por 0 denominado el vector cero, tal que u + 0= u para todo vector uϵV. [A3 ] para todo vector uϵV existe un único vector en V, denotado por -u, tal que u+(-u)=0. [A4 ] para todo par de vectores u, uϵV, u+v=v+u.")
5
[M1] para todo escalar kϵK y todo par de vectores u,vϵV, k (u+v)=ku+kv.
[M2 ]para todo escalar ɑ, bϵK y todo vector uϵV, (ɑ+b )u=ɑu + bu. [M3 ]para todo par de escalares ɑ, bϵK y todo vector uϵV, (ɑb)u= ɑ(bu). [M4 ]el escalar unidad 1ϵK cumple 1u=u para todo vector uϵV.
![[M1] para todo escalar kϵK y todo par de vectores u,vϵV, k (u+v)=ku+kv.](http://slideplayer.es/slide/1614898/5/images/5/%5BM1%5D+para+todo+escalar+k%CF%B5K+y+todo+par+de+vectores+u%2Cv%CF%B5V%2C+k+%28u%2Bv%29%3Dku%2Bkv..jpg "[M2 ]para todo escalar ɑ, bϵK y todo vector uϵV, (ɑ+b )u=ɑu + bu. [M3 ]para todo par de escalares ɑ, bϵK y todo vector uϵV, (ɑb)u= ɑ(bu). [M4 ]el escalar unidad 1ϵK cumple 1u=u para todo vector uϵV.")
6
Los axiomas procedentes se desdoblan de forma natural en dos categorías. Los cuatro primeros atañen únicamente a la estructura aditiva de V y pueden resumirse diciendo que V es un grupo conmutativo bajo la suma. De ello .se deriva que cualquier suma de vectores de la forma v1 + v vm no requiere paréntesis y no depende del orden de los sumandos, que el vector 0, es unico, que el opuesto -u de u es único y que se verifica la ley de cancelación; esto es, para tres vectores cualesquiera u, v, wϵV. U + w = v + w implica u = v

7
Asimismo, la resta se define según
u – v = u + (-v) Por otra parte, los cuatro axiomas restantes se refieren a la acción del cuerpo K sobre V. Obsérvese que la rotulación de los axiomas refleja este desdoblamiento. Empleando estos axiomas adicionales probaremos las siguientes Propiedades elementales de un espacio vectorial.
 Por otra parte, los cuatro axiomas restantes se refieren a la acción del cuerpo K sobre V. Obsérvese que la rotulación de los axiomas refleja este desdoblamiento. Empleando estos axiomas adicionales probaremos las siguientes Propiedades elementales de un espacio vectorial.")
8
Teorema 5.1 : sea V u espacio vectorial sobre un cuerpo K.
i) para todo escalar kϵK y 0ϵV, K0= 0. ii) para 0ϵK y todo vector uϵV, 0u= 0. iii) si ku=0 donde kϵK y uϵV, entonces k = 0 o u = 0. iv) para todo kϵK y todo uϵV, (-k)u = k(-u) = - ku.
 para todo escalar kϵK y 0ϵV, K0= 0. ii) para 0ϵK y todo vector uϵV, 0u= 0. iii) si ku=0 donde kϵK y uϵV, entonces k = 0 o u = 0. iv) para todo kϵK y todo uϵV, (-k)u = k(-u) = - ku.")
9
EJEMPLOS DE ESPACIOS VECTORIALES
ESPACIO Kn Sea K un cuerpo arbitrario. La notación Kn se usa frecuentemente para designar el conjunto de todas las n-plas de elementos de K. Aquí Kn se ve como un espacio vectorial sobre K, en el que la suma vectorial y el producto por un escalar se define según:

10
el vector cero en Kn es la n-plas de ceros 0 = (0,...,0)
(ɑ1 ɑ2,..., ɑn ) + (b1 b2,..., bn ) = (ɑ1 + b1 , ɑ2 + b2 , ..., ɑn + bn ) y k (ɑ1, ɑ2,..., ɑn) = (k ɑ1,k ɑ2,...,kɑn) el vector cero en Kn es la n-plas de ceros 0 = (0,...,0) y el opuesto de un vector se define por -(ɑ1 ɑ2,..., ɑn ) = (-ɑ1 -ɑ2,..., -ɑn ) La demostración de que Kn es un espacio vectorial es idéntica al teorema 2.1, que ahora puede considerarse como la afirmación de que Rn , con la operaciones ahí definidas, es un espacio vectorial sobre R.
 + (b1 b2,..., bn ) = (ɑ1 + b1 , ɑ2 + b2 , ..., ɑn + bn ) y. k (ɑ1, ɑ2,..., ɑn) = (k ɑ1,k ɑ2,...,kɑn) el vector cero en Kn es la n-plas de ceros. 0 = (0,...,0) y el opuesto de un vector se define por. -(ɑ1 ɑ2,..., ɑn ) = (-ɑ1 -ɑ2,..., -ɑn ) La demostración de que Kn es un espacio vectorial es idéntica al teorema 2.1, que ahora puede considerarse como la afirmación de que Rn , con la operaciones ahí definidas, es un espacio vectorial sobre R.")
11
ESPACIO DE MATRICES Mm, n.
La notación Mm, n, o simplemente M, se utilizara para designar el conjunto de todas las matrices m*n sobre un cuerpo arbitrario K.Mm, n., es un espacio vectorial sobre K con respecto a las operaciones usuales de suma matricial y producto por un escalar.

12
ESPACIO DE POLINOMIOS P(t)
Denotamos por P(t) el conjunto de todos los polinomios ɑ0 +ɑ1 t+ɑ2, t ɑn, t n con coeficientes ai en algún cuerpo k. P(t) es un espacio vectorial sobre K con respecto a las operaciones usuales de suma de polinomios producto de un polinomio por una constante.
 el conjunto de todos los polinomios. ɑ0 +ɑ1 t+ɑ2, t ɑn, t n. con coeficientes ai en algún cuerpo k. P(t) es un espacio vectorial sobre K con respecto a las operaciones usuales de suma de polinomios producto de un polinomio por una constante.")
13
ESPACIO DE FUNCIONES F(X)
Sean X un conjunto no vacío y K un cuerpo arbitrario. Consideremos el conjunto F(X) de todas las funciones de X en K.( nótese que F(X) es no vacío por serlo X). la suma de dos funciones f,gϵF(X) es la función f+gϵF(X) definida por: (f + g)(x) = f(x) + g(x) ∀xϵX y el producto de un escalar kϵK por una función fϵF(X) es la función kfϵF(X) definida por: (kf)(x)= kf(x) ∀xϵX
 de todas las funciones de X en K.( nótese que F(X) es no vacío por serlo X). la suma de dos funciones f,gϵF(X) es la función f+gϵF(X) definida por: (f + g)(x) = f(x) + g(x) ∀xϵX. y el producto de un escalar kϵK por una función fϵF(X) es la función kfϵF(X) definida por: (kf)(x)= kf(x) ∀xϵX.")
14
(Subespacio de R n) Un subconjunto V no vacio de Rn se llama subespacio (vectorial o lineal) de Rn si satisface la siguiente propiedades. 1.- si U Y V, entonces U+V están V. 2.-si C es cualquier escalar y U esta en V, entonces CU esta en V.

15
Las propiedades 1 y 2 implican que cualquier combinación lineal de elementos de V también están V. si un conjunto S no vacio de Rn satisface la parte 1 la definición, se dice que S es cerrado bajo (o respecto a) a la suma (vectorial). Si S cumple la parte 2, se dice que S es cerrado bajo (o respecto a) a la multiplicación por escalares. Así, un subespacio de R n es un subconjunto cerrado bajo la suma vectorial y la multiplicación por escalares. Todo subespacio V de R n contiene el sector cero. 0 (V es un no vacio, de modo que tiene al menos un elemento, por ejemplo u. pero entonces 0u=0 esta en V, según la parte 2 de la definición).
.")
16
EJEMPLO: 1 {0 } Y Rn. son subespacio de Rn
EXPLICACION {0 } es un subespacio de Rn por que 0+0=0 y c0=o para toda c Є R Rn Es un subespacio de Rn por que la suma de los vectores n cualesquiera es un vector n, y cualquier múltiplo escalar de un vector n es nuevo vector de n. {0 } también se llama subespacio cero de Rn. {0 } y Rn. son subespacios triviales de Rn.

18
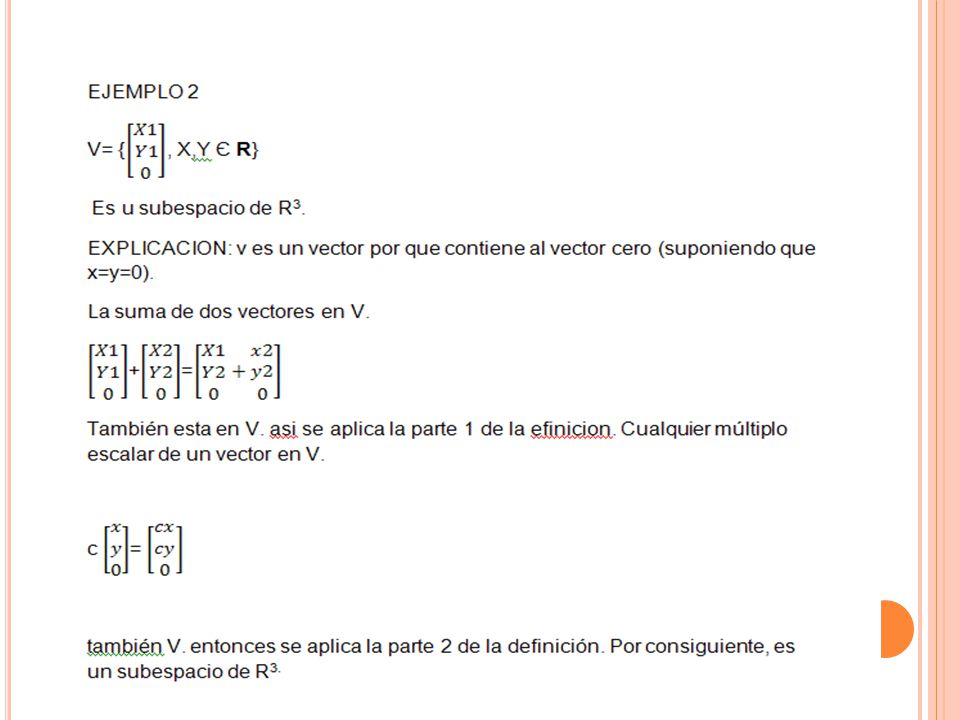
EJEMPLO 3 V= {(x,y,x+y),x,y Є R} es un subespacio de R3. EXPLICACION: V es un no vacio (¿Por qué? Sean V1= (x1,y1,x1+y1) y V2= (x2,y2,x2+y2) cualesquiera elemento de V y sea cualquier escalar entonces (x1,y1,,x1+y1)+(x2,y2,x2+y2)=(x1+x2,y1+y2,(x1+x2)+(y1+y2) C(x1,y1,x1+y1)= (cx1,cy1,(cx1)+(cy1) Por consiguiente, V1+V2,cV1 Є V. entonces, V es un subespacio de R3.
 y V2= (x2,y2,x2+y2) cualesquiera elemento de V y sea cualquier escalar entonces. (x1,y1,,x1+y1)+(x2,y2,x2+y2)=(x1+x2,y1+y2,(x1+x2)+(y1+y2) C(x1,y1,x1+y1)= (cx1,cy1,(cx1)+(cy1) Por consiguiente, V1+V2,cV1 Є V. entonces, V es un subespacio de R3.")
19
Base de un subespacio de rn
( (BASE) Un subconjunto no vacio B de un espacio V no cero de Rn es una base de V si 1.-B es linealmente independiente 2.-B genera a V
 Un subconjunto no vacio B de un espacio V no cero de Rn es una base de V si. 1.-B es linealmente independiente. 2.-B genera a V.")
20
EJEMPLO 6 compruebe que B={ , , } Es una base de R3 SOLUCION primero es necesario demostrar que B es linealmente independiente que genera R3. Sea A la matriz cuyas columnas son los vectores de B como A= ~

21
EJEMPLO 7 ¿ es el conjunto S={(1,0,0),(0,1,0)} ¿ Es S una base del subespacio V= {(x,y,,0),x,y Є R} de R3 RESPUESTA S es linealmente independiente, por que todas las columnas de A = son pivote. S no es una base de R3 por que A tiene 3 renglones y solo 2 pivotes, de modo que S no genera a R3. Por otra parte, S genera al menor espacio V por que (X, Y, 0)=X (1, 0,0)+Y (0, 1,0) Por consiguiente, S si es una base de V.
=X (1, 0,0)+Y (0, 1,0) Por consiguiente, S si es una base de V.")
22
EJEMPLO 8 ¿Es el subconjunto T= {(1,1,1),(2,1,-1),(1,0,-2) } una base de R3 RESPUESTAS No, puesto que [ ][ ] T no es linealmente independiente (3 columnas y solo 2 pivotes). En realidad T ni siquiera genera a R3 (3 renglones, solo 2 pivotes)
![EJEMPLO 8 ¿Es el subconjunto T= {(1,1,1),(2,1,-1),(1,0,-2) } una base de R3. RESPUESTAS. No, puesto que [ ][ ]](http://slideplayer.es/slide/1614898/5/images/22/EJEMPLO+8+%C2%BFEs+el+subconjunto+T%3D+%7B%281%2C1%2C1%29%2C%282%2C1%2C-1%29%2C%281%2C0%2C-2%29+%7D+una+base+de+R3.+RESPUESTAS.+No%2C+puesto+que+%5B+%5D%5B+%5D.jpg "T no es linealmente independiente (3 columnas y solo 2 pivotes). En realidad T ni siquiera genera a R3 (3 renglones, solo 2 pivotes)")
23
Unicidad de coordenadas
UN SUBCONJUNTO B={ V1….V2} de V es una base de V si y solo si para cada vector v en v hay escalares únicos c1….ck tales que V= C1V1+….+CKVK

24
EJEMPLO 9 Determine las coordenadas y el vector de coordenadas de v= (4,0,-4) con respecto a la base B = {(1,1,-1),(0,1,2),(-2,1,0) }de R3 SOLUCION El hecho de que B sea de R3 se verifica en el ejemplo. Ahora se necesita escalares c1, c2 y c3 tales que c1 +C2 +C = al resolver el sistema correspondiente se obtienen c1= 2, c2= y c3= -1. Por consiguiente [v]

25
INDEPENDENCIA LINEAL Se dice que un conjunto de vectores v1,…,vn de un espacio vectorial V es linealmente dependiente si hay escalares c1,…,cn, no todos cero, tales que Se dice que v1,…,vn es linealmente independientes si no es linealmente dependiente. En otras palabras, la ecuación (4.1) implica que . Si S es cualquier subconjunto de V (posiblemente infinito), solo lo llamaremos linealmente dependiente cuando contenga un subconjunto finito linealmente dependiente. En cualquier otro caso, S es linealmente independiente
 implica que . Si S es cualquier subconjunto de V (posiblemente infinito), solo lo llamaremos linealmente dependiente cuando contenga un subconjunto finito linealmente dependiente. En cualquier otro caso, S es linealmente independiente.")
26
DEPENDENCIA E INDEPENDENCIA LINEAL
sea V un espacio vectorial sobre un cuerpo K. se dice que los vectores son linealmente dependientes sobre K, o simplemente dependientes, si existen escalares , no todos 0, tales que En caso contrario se dice que los vectores son linealmente independientes sobre K, o simplemente independientes. Observemos que la relación (*) se verifica siempre si los a1 son todos 0. Si la relación solo se verifica en este caso, es decir, Implica
 se verifica siempre si los a1 son todos 0. Si la relación solo se verifica en este caso, es decir, Implica.")
27
COMBINACIONES LINEALES Y DEPENDENCIA LINEAL
Las nociones de combinación lineal y dependencia lineal están estrechamente relacionadas. De forma específica, demostraremos que los vectores , cuando hay más de uno, son linealmente dependientes si y solo si uno de ellos es la combinación lineal de los otros: Entonces sumando –vi a ambos miembros, obtenemos Donde el coeficiente de vi no es 0; por consiguiente, los vectores son linealmente dependientes. Recíprocamente, supongamos que los vectores son linealmente dependientes, digamos.

28
La dimensión (del latín dimensio, "medida") es, esencialmente, el número de grados de libertad para realizar un movimiento en el espacio. Comúnmente, las dimensiones de un objeto son las medidas que definen su forma y tamaño

29
Comenzando estableciendo dos caminos equivalentes para definir una base de un espacio vectorial V.
Definición A: si un conjunto S= u1, u2 …un de vectores es una base de V si se verificaran las dos condiciones: 1.- u1, u2 …un son linealmente independientes 2.- u1, u2 …un generan V

30
Definición B: Un con junto S= u1, u2 …un de dos vectores es una base de V si todo vector vV puede escribirse de forma única como combinación lineal de sus vectores. Se dice que un espacio vectorial es de dimensión finita n o que es n-dimensional, escrito Dim V=n

31
Teorema 1.- Sea un vector espacio vectorial de dimensiones finito. Entonces todas la bases de V tienen el mismo número de elementos. El espacio vectorial 0 tiene dimensiones 0, por definición. Cuando un espacio vectorial no es de dimensión finita, se dice que es de dimensión infinita.

32
Lema: supongamos que v1, v2 ,…vn que genera V y que w1, w2 …wm es linealmente independiente. En ese caso, mn y V esta generado por un conjunto de la forma w1, w2 …wm, v1, v2 ,…vn-,m

33
Teorema 2.- supongamos que S genera un espacio vectorial V
cualquier numero máximo de vectores linealmente independiente s en S es una base de V si se suprime de S todo vector que sea combinación lineal de los precendentes, los vectores que quedan constituyen una base de V

34
Teorema 3.- sean V un espacio vectorial de dimensión finita y S= u1, u2 …un un conjunto de vectores linealmente independientes en V. En ese caso, S es parte de una base de V, es decir exteb¡nderse a una base de V

35
Teorema 4.- sea W un subespacio de un espacio n-dimensional V. entonces dim Wn. si en particular, dim W= n, necesariamente W=V

36
4.5 espacio vectorial con producto interno y sus propiedades

37
espacio vectorial con producto interno y sus propiedades
Sea V un espacio vectorial real. Supongamos que a cada par de vectores u, uЄ V se le asigna un numero real, denotado por<u,v>.

38
esta función se llama producto interno(real) en V si satisface las axiomas:
[I1](propiedad lineal)<au1+bu2,u>=a<u1,u>+b<u2,u>. [I2] propiedad simétrica = [I3]propiedad definida positiva si y solo si u= 0
<au1+bu2,u>=a<u1,u>+b<u2,u>. [I2] propiedad simétrica = [I3]propiedad definida positiva si y solo si u= 0.")
39
El espacio vectorial V se denomina entonces espacio (real)con producto interno.
El axioma [I1] es equivalente a las dos condiciones: A) B)
 B)")
40
ejemplos 1) Si u=(3,-2), v=(4,5) .Calcular <u,v>
 Si u=(3,-2), v=(4,5) .Calcular <u,v>")
41
ORTOGONALIDAD Sea V un espacio con producto interno, se dice que los vectores u,v € V son ortogonales y que u es ortogonal a v si La relación es claramente simétrica, es decir si u es ortogonal a v necesariamente y por lo tanto v es ortogonal a u. Hacemos notar que es ortogonal a todo ya que

42
Recíprocamente si u es ortogonal a todo ,
entonces, luego por observemos que son ortogonales si y solo si ,siendo Ѳ el ángulo entre ,lo que es cierto si y solo si son perpendiculares esto es si Ѳ ). EJEMPLO 6.5 Consideremos un vector arbitrario en R´´. Un vector es ortogonal a u si
. EJEMPLO 6.5. Consideremos un vector arbitrario en R´´. Un vector es ortogonal a u si.")
43
COMPLEMENTOS ORTOGONALES
Sea S un subconjunto de un espacio con producto interno v. El complemento ortogonal de S, denotado por S (leído S perp), consiste en aquellos vectores de V que son ortogonales a todo vector En particular, para un vector dado u en V, tendremos
, consiste en aquellos vectores de V que son ortogonales a todo vector. En particular, para un vector dado u en V, tendremos.")
44
Es decir, u consiste en todos los vectores que son ortogonales al vector dado u. Probemos que S es un sub espacio de V. Obviamente, Puesto que 0 es ortogonal a todo vector V. Supongamos ahora que En tal caso, para todo par de escalares a y b y todo vector De este modo, Establezcamos formalmente este resultado.

45
Cambio de base Sea v un vector en el espacio vectorial V de dimensiones finitas, y sean dos bases. A continuación definiremos una relación entre Como B, es una base, los elementos de B son combinaciones lineales de los elementos de B, Entonces hay escalares tales que P es la matriz cuyo elemento (i,j) es aij
 es aij.")
46
Sean dos bases de un espacio vectorial de dimensión finita. Sea P la matriz n x n cuyas columnas son Entonces P es invertible y esta es la única matriz en la que para todo ,

47
PROCESO DE ORTONORMALIZACION GRAM-SCHMIDT
En este párrafo describiremos un método muy importante, llamado proceso de Gram-Schmidt, que nos permite “ortogonalizar” cualquier base B de cualquier subespacio V de R; es decir, transformar a esta en una nueva base de V que tenga vectores ortogonales. Sea V cualquier subespacio de R” y cualquier base de V.se desea reemplazar en forma en forma gradual a los vectores por los vectores que sean ortogonales y que sigan formando una base V. primero, reemplazamos el conjunto por un conjunto ortogonal tal que Gen =Gen

48
Ejercicio Determine una base ortonormal y una ortonormal de R3 aplicando el proceso de Gram-Schmidt a la base , en el cual Solución: sea u1=v1. Como en ese caso

49
Ya que entonces Así la base ortogonal es

50
Por ultimo, normalizamos para obtener una base ortonormal B”:

Presentaciones similares