Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Diseño óptimo de recorridos y frecuencias para transporte público
Antonio Mauttone, María E. Urquhart (2007) Metaheurísticas Presentación: Luciana Salvagni Octubre 2010
 Metaheurísticas. Presentación: Luciana Salvagni. Octubre")
2
TNDP El problema consiste en el diseño óptimo de recorridos y frecuencias en sistemas de transporte público colectivo urbano, TNDP= Transit Network Design Problem Se quiere encontrar un conjunto de recorridos en base a información de la red vial y de la demanda de viajes. Se busca optimizar objetivos contrapuestos: usuarios y operadores. Restricciones generales: satisfacción de la demanda, niveles de servicio, disponibilidad de los recursos.

3
Las frecuencias se incluyen como variables de decisión en los modelos de optimización de recorridos.
TNDP se resuelve en forma aproximada utilizando un algoritmo basado en GRASP que calcula un conjunto de soluciones no dominadas que conforman un frente de Pareto El caso que se utiliza de prueba es el de la ciudad de Rivera, Uruguay.

4
Dificultades en resolución del TNDP
Alta complejidad .Es una variante compleja del problema generalizado de diseño de redes de transporte, que es NP hard. Naturaleza multiobjetivo. Objetivos contrapuestos. Requiere un modelo subyacente de asignación. Evaluar una solución requiere asignar pasajeros a los recorridos, especificando como se distribuye la demanda entre los recorridos de una solución.

5
Z1 función objetivo de usuarios Z2 función objetivo de operador
TNDP se puede formular según dos enfoques que reflejan los intereses contrapuestos que considera. Z1 función objetivo de usuarios Z2 función objetivo de operador Optimización Multiobjetivo min Z1 min Z2 No se calcula una única solución óptima, sino un conjunto de soluciones no dominadas que conforman un frente de Pareto Suma Ponderada min a Z1 + b Z2 Los coeficientes a y b son determinados a priori y representan la importancia relativa de los objetivos.

6
¿Qué es un frente de Pareto?
Sean f y g funciones objetivo de usuarios y operadores respectivamente, decimos que una solucion S1 domina a S2 si: S1 no es peor que S2 S1 es estrictamente mejor que S2 en algún objetivo Objetivos en conflicto: no existe una solución que minimice todos los objetivos simultáneamente. Frente de Pareto : conjunto que contiene las soluciones no dominadas, es decir, tales que no existen otras que las mejoran en ambos objetivos simultáneamente. Estas soluciones representan los diferentes compromisos entre los objetivos.

7
Los algoritmos de resolución para TNDP se clasifican:
Heurísticas clásicas Metaheurísticas. Genéticos, Tabu Search, Grasp.

8
Esquema de un algoritmo GRASP
Mientras no se verifique el criterio de parada ConstruirGreedyRandomizedSolución ( Sol) Búsqueda Local (Sol) ActualizarSolución (Sol, MejorSol) End
 Búsqueda Local (Sol) ActualizarSolución (Sol, MejorSol) End.")
9
En este trabajo: formulación matemática del modelo según enfoque multiobjetivo. algoritmo aproximado de resolución basado en GRASP.

10
Formulación del modelo
G=(N,A) grafo no dirigido que modela la red sobre la cual se definen los recorridos. N= representan intersecciones de calles de la red vial o centroides de zonas. A= representan calles de la red vial o conexiones entre centroides de zonas adyacentes.
 grafo no dirigido que modela la red sobre la cual se definen los recorridos. N= representan intersecciones de calles de la red vial o centroides de zonas. A= representan calles de la red vial o conexiones entre centroides de zonas adyacentes.")
11
Formulación del modelo
La elección en A y N dependerá del nivel de agregación adoptado de la red y la demanda de viajes. r = recorrido = secuencia de vértices adyacentes en el grafo G, se compone de aristas no dirigidas, tiene un sentido de ida y otro de vuelta.

12
Formulación del modelo
Una solución al TNDP es un par S=(R,F), donde: R= conjunto de recorridos ri F= conjunto de frecuencias fi fi es la frecuencia de buses (pasadas por unidad de tiempo) operando en el recorrido ri
, donde: R= conjunto de recorridos ri. F= conjunto de frecuencias fi. fi es la frecuencia de buses (pasadas por unidad de tiempo) operando en el recorrido ri.")
13
Formulación del modelo
(1) representa los intereses de los usuarios. D=(dij) es la matriz origen-destino que caracteriza a la demanda, de tamaño n=|N| dij= demanda de viajes desde vértice i hacia vértice j tvij + teij + ttij = tiempo total de viaje entre vértices i y j para una solución dada S. Son tiempos de viaje en vehículo, espera y penalización por transbordo.
 representa los intereses de los usuarios. D=(dij) es la matriz origen-destino que caracteriza a la demanda, de tamaño n=|N| dij= demanda de viajes desde vértice i hacia vértice j. tvij + teij + ttij = tiempo total de viaje entre vértices i y j para una solución dada S. Son tiempos de viaje en vehículo, espera y penalización por transbordo.")
14
Formulación del modelo
(2) representa los intereses de los operadores. tk= duración total (ida y vuelta) del recorrido k. fk tk = cantidad de buses necesarios para cubrir recorrido k con frecuencia fk.
 representa los intereses de los operadores. tk= duración total (ida y vuelta) del recorrido k. fk tk = cantidad de buses necesarios para cubrir recorrido k con frecuencia fk.")
15
Formulación del modelo
D0(S)= proporción del total de demanda satisfecha con viajes directos por los recorridos de S. D 0min=mínima proporción permitida de viajes directos satisfechos para cualquier solución. D01(S)= proporción de total de demanda satisfecha con viajes directos o al menos un transbordo por los recorridos de S. D01min= mínima proporción permitida para cualquier solución.
= proporción del total de demanda satisfecha con viajes directos por los recorridos de S. D 0min=mínima proporción permitida de viajes directos satisfechos para cualquier solución. D01(S)= proporción de total de demanda satisfecha con viajes directos o al menos un transbordo por los recorridos de S. D01min= mínima proporción permitida para cualquier solución.")
16
Formulación del modelo
(3) y (4) aspectos de satisfacción de la demanda. (5) límites superiores e inferiores para las frecuencias.
 y (4) aspectos de satisfacción de la demanda. (5) límites superiores e inferiores para las frecuencias.")
17
Formulación del modelo
FCk = factor de carga de los buses del recorrido k FC max = máximo factor de carga permitido en cualquier solución. CAP= capacidad de pasajeros sentados en los buses. Φk* :Flujo crítico en el recorrido k = representa la carga del recorrido en términos de la demanda D. (6) nivel de servicio relacionado con ocupación de los buses, impone valores mínimos factibles para las frecuencias de cada recorrido.
 nivel de servicio relacionado con ocupación de los buses, impone valores mínimos factibles para las frecuencias de cada recorrido.")
18
Dada una solución S al TNDP, para conocer Z1(S) y verificar la factibilidad de las frecuencias se aplica un modelo de asignación de pasajeros basado en frecuencias. Este modelo tiene en cuenta: Competencia entre líneas Costos constantes en aristas. Restricciones de capacidad de buses, entrada: R y Fent, y produce: Fsal, que representa equilibrio entre oferta y demanda. Estos valores se usan para determinar (6). Calcula tvij, teij, ttij y el flujo crítico en cada recorrido.
. Calcula tvij, teij, ttij y el flujo crítico en cada recorrido.")
19
GRASP TNDP Genera un frente de Pareto aproximado en una sola instancia de ejecución del algoritmo. Construcción de soluciones: determina R según restricciones (3) y (4) de demanda, Búsqueda local: determina F que verifican (5) y (6), Los costos de las aristas de la red son constantes, se calculan los caminos más cortos entre pares de vértices antes de las iteraciones GRASP
 y (4) de demanda, Búsqueda local: determina F que verifican (5) y (6), Los costos de las aristas de la red son constantes, se calculan los caminos más cortos entre pares de vértices antes de las iteraciones GRASP.")
20
GRASP TNDP t max= duración máxima de los recorridos, se determina en cada iteración por un valor aleatorio en un intervalo de extremos dados, y se utiliza en la construcción para obtener soluciones diversas. Dado R, se construye S=(R,F) donde F son las mínimas frecuencias factibles según (6), para esto se aplica modelo de asignación. La búsqueda local recibe como parámetro una dirección aleatoria en el espacio de los objetivos, que determina un nivel de compromiso entre estos : λ=(λ1, λ2).
 donde F son las mínimas frecuencias factibles según (6), para esto se aplica modelo de asignación. La búsqueda local recibe como parámetro una dirección aleatoria en el espacio de los objetivos, que determina un nivel de compromiso entre estos : λ=(λ1, λ2).")
21
GRASP TNDP

22
Construcción de soluciones
Genera recorridos en forma iterativa buscando satisfacer la demanda. L= lista de pares de nodos con demanda no satisfecha con viajes directos por recorridos de la solución en construcción. α= parámetro de GRASP, α Є [ 0 , 1]. LRC = lista restringida de candidatos, formada por los α*|L| pares de vértices con mayor valor de demanda dij en L.

23
Construcción de soluciones
Se selecciona al azar (u,v) de LCR según distribución uniforme. Se satisface la demanda duv : Creando un nuevo recorrido de extremos u y v con el camino más corto en G. Insertando u y v en un recorrido de la solución en construcción, se evalúa inserción entre todo par de vértices consecutivos de todos los recorridos, se busca posición que minimice incremento de recorrido.
 de LCR según distribución uniforme. Se satisface la demanda duv : Creando un nuevo recorrido de extremos u y v con el camino más corto en G. Insertando u y v en un recorrido de la solución en construcción, se evalúa inserción entre todo par de vértices consecutivos de todos los recorridos, se busca posición que minimice incremento de recorrido.")
24
Construcción de soluciones
Se compara (1) con menor incremento en el costo debido a (2), se elige el menor. Se imponen 2 restricciones sobre los recorridos de una solución en construcción: tmax ρmax= factor cíclico máximo, El factor cíclico de un recorrido con extremos u y v es la proporción entre tiempo de viaje entre u y v en r y costo camino más corto entre u y v en G. Fin de construcción cuando se cumplen (3) y (4)
 con menor incremento en el costo debido a (2), se elige el menor. Se imponen 2 restricciones sobre los recorridos de una solución en construcción: tmax. ρmax= factor cíclico máximo, El factor cíclico de un recorrido con extremos u y v es la proporción entre tiempo de viaje entre u y v en r y costo camino más corto entre u y v en G. Fin de construcción cuando se cumplen (3) y (4)")
25
Búsqueda Local Trabaja sobre el conjunto de frecuencias F de la solución S=(R,F), R permanece fijo. Parte de una solución S a la que se le ha aplicado el modelo de asignación para determinar las mínimas frecuencias factibles. Se tiene como entrada del problema un conjunto Θ ordenado en forma creciente de valores de frecuencias. Vecindad V(S): se cambia un solo valor fi por otro fi` que es un valor consecutivo en el conjunto Θ (mayor o menor) para fi en F.
: se cambia un solo valor fi por otro fi` que es un valor consecutivo en el conjunto Θ (mayor o menor) para fi en F.")
26
Búsqueda Local |V(S)| es máximo 2*|R|
La evaluación de solución vecina implica uso de modelo de asignación (para calcular Z1). Búsqueda según first-improving, comparación de soluciones con única función objetivo según λ. Todas las soluciones de la trayectoria de búsqueda son agregadas al frente de Pareto P.
. Búsqueda según first-improving, comparación de soluciones con única función objetivo según λ. Todas las soluciones de la trayectoria de búsqueda son agregadas al frente de Pareto P.")
27
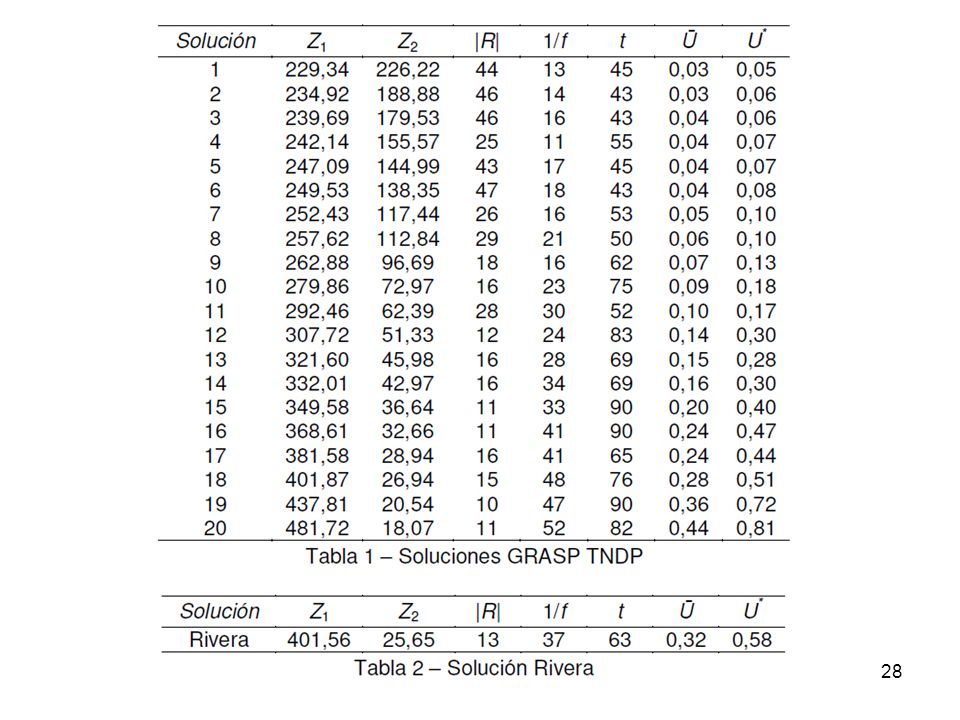
Resultados Caso real: Sistema de transporte público colectivo urbano de la ciudad de Rivera, Uruguay. Se obtuvo un frente de Pareto aproximado P formado por 238 soluciones no dominadas.

29
Resultados La valores de la solución que opera en el sistema de Rivera se puede considerar como un valor del frente calculado.

30
Conclusiones Las soluciones obtenidas permiten caracterizar los diferentes grados de compromiso entre los objetivos contrapuestos, en base a cantidad de recorridos, su duración y frecuencia, y la utilización de los buses. Es posible generar en forma automática soluciones de características comparables a la solución actual, y otras soluciones alternativas con diferentes grados de compromiso entre objetivos contrapuestos. Menor costo para usuarios, mayor cantidad de recorridos y menor duración de los mismos, tiempos de pasadas y utilización de buses, y viceversa.

Presentaciones similares














 BOLETÍN 5020>")




