Descargar la presentación
La descarga está en progreso. Por favor, espere

1
ING. JUAN CARLOS TELLEZ BARRERA
OPTOELECTRONICA APLICADA A LA ROBÓTICA ING. JUAN CARLOS TELLEZ BARRERA

2
¿Qué es un robot? Se visualiza desde el punto de vista de preparación profesional: Técnico en mantenimiento: Colección de componentes mecánicos y electrónicos. Ingeniero en Sistemas: Colección de subsistemas interrelacionados. Programador: Una máquina que ha ser programada. Ingeniero de Manufactura: Máquina capaz de realizar un tarea específica.

3
Un robot esta formado por un conjunto de subsistemas que básicamente son de procesos, planeación, control, sensores.

4
Ingeniero en Electronica:
Conjunto de subsistemas interrelacionados por circuitos electrónicos para realizar un fin o acción determinada y tenga la capacidad de responder a un estimulo o entorno por medio de SENSORES.

5
Por ejemplo: Químicos Mecánicos Ópticos Magneticos

6
SENSORES OPTOELECTRONICOS

7
OPTOELECTRONICA APLICADA A LA ROBOTICA

8
¿Qué es la OPTOELECTRONICA?
Es la unión entre los sistemas ópticos y los sistemas electrónicos. Los componentes optoelectrónicos son aquellos capaces de convertir energía luminosa en eléctrica o viceversa.

9
¿Como se clasifican? Basicamente por una de dos funciones:
Conversión de energía eléctrica a energía radiante. Conversión de energía radiante a energía eléctrica.

10
Basados en la excitación por una corriente eléctrica que provoca en aquellos la emisión de energía luminosa en forma de radiaciones visibles o no. Estos dispositivos son llamados ELECTROLUMINICENTES. A partir de una excitación luminosa producen o controlan cambios de energía eléctrica. Estos dispositivos son llamados FOTOSENSIBLES.

11
LED (light emmiter diode),
,")
12
Un LED es un dispositivo semiconductor que emite radiación visible, infrarroja o ultravioleta cuando se hace pasar un flujo de corriente eléctrica a través de este en sentido directo.

13
Material Longitud de Onda AsGa 904 nm IR 1 V InGaAsP 1300 nm IR 1 V AsGaAl nm Rojo 1,5 V AsGaP 590 nm Amarillo 1,6 V InGaAlP 560 nm Verde 2,7 V Csi 480 nm Azul 3 V

14
LED LASER INFRARROJO BICOLOR SUPER BRILLANTE
TIPOS DE DIODOS LED LASER INFRARROJO BICOLOR SUPER BRILLANTE

15
EL FOTODIODO Un fotodiodo es una unión de material "P" y material "N" polarizada inversamente, en la cual la corriente inversa está en función de la luz que incide en el fotodiodo y a mayor intensidad de luz existe una corriente de fuga mayor.

16
FOTOTRANSISTOR Es una combinación integrada de fotodiodo y transistor bipolar npn (sensible a la luz) donde la base recibe la radiación óptica.
 donde la base recibe la radiación óptica.")
17
La sensibilidad de un fototransistor es superior a la de un fotodiodo, ya que la pequeña corriente fotogenerada es multiplicada por la ganancia del transistor

18
FOTODARLINGTON Es el mismo que el fototransistor, con una ganancia mucho mayor debido a las dos etapas de amplificación, conectadas en cascada, incorporadas en una sola pastilla.

19
FOTO SCR. El circuito equivalente con dos transistores del rectificador controlado de silicio ilustra el mecanismo de conmutación de este dispositivo.

20
El LDR (Light Dependent Resistor) O resistencia dependiente de la luz, es una resistencia que varia su valor en función de la luz que incide sobre su superficie. Cuanto mas sea la intensidad de luz que incida en su superficie menor será su resistencia y contra menos luz incida mayor será la resistencia.

21
SENSORES INFRARROJOS Fotodiodo sensible al espectro infrarrojo. Filtro intercostruido en el encapsulado. Como componente discreto. Como parte de un circuito.

22
SENSORES INFRARROJOS Fotodiodo sensible al espectro infrarrojo. Filtro interconstruido en el encapsulado. Como componente discreto. Como parte de un circuito.

23
OPTOACOPLADORES Un optoacoplador es un dispositivo que contiene una fuente de luz y un detector fotosensible separados una cierta distancia y sin contacto eléctrico entre ellos

24
De aislamiento. OPTOTRIACS MOC3011 OPTODARLINGTON 4N29 OPTOTRANSISTOR 4N25 OPTOSCR 4N39

25
POR INTERRUPCIÓN (Optointerruptores)
Emisor y receptor separados por un GAP expuesto y de pequeña separación. Sensores de fin de carrera. Dicos multiperforados en encoders.

26
POR REFLEXIÓN

27
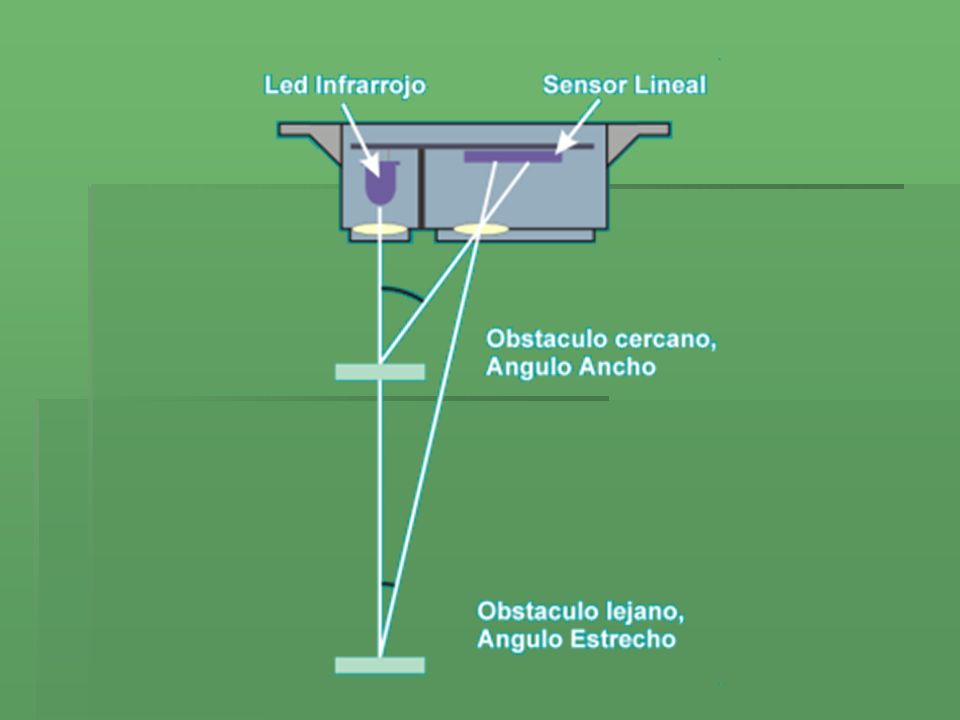
El sensor GP2DXX de sharp es un dispositivo de reflexión por infrarrojos con medidor de distancia proporcional al ángulo de recepción del haz de luz que incide en un sensor lineal integrado, la salida puede ser analógica, digital o booleana.

29
El CNY70 es un pequeño dispositivo con forma de cubo y cuatro terminales, aloja en su interior un diodo emisor de infrarrojos que trabaja a una longitud de onda de 950 nm y un fototransistor dispuestos en paralelo y apuntando ambos en la misma dirección.

30
CNY70

31
En codificadores de servomecanismos
CONTADOR ACONDICIONADOR DE SEÑAL DATO UTIL PARA PROCESAR

32
En minirobotica: Seguir trayectorias trazadas en lineas contrastantes

33
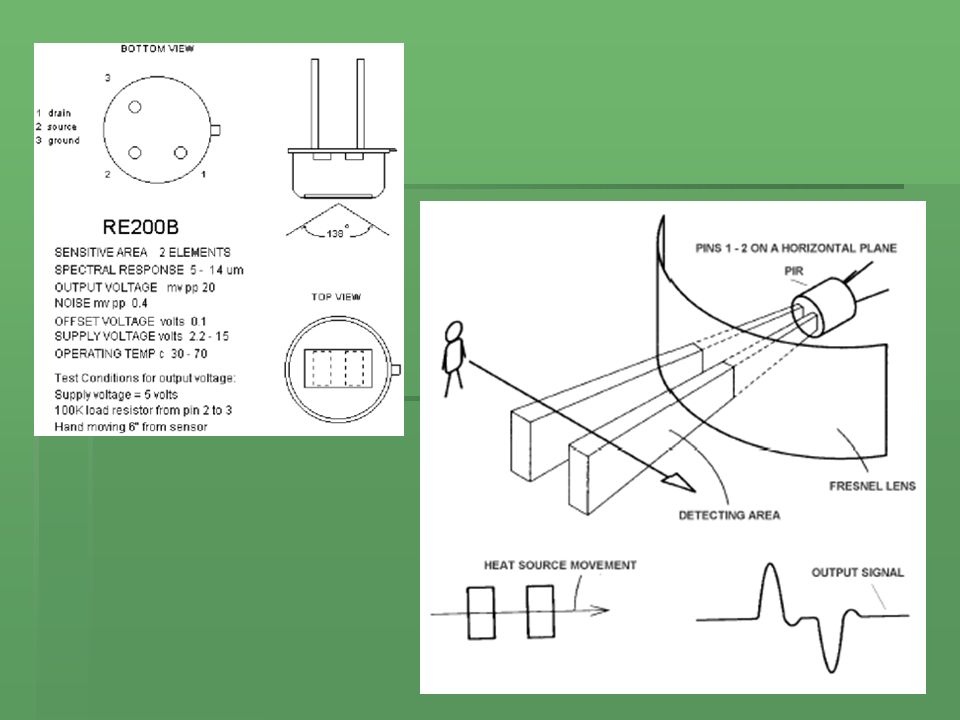
PIROELEMENTOS (SENSOR PIROELECTRICO)
Esta fabricado de un material cristalino que genera una pequeña carga eléctrica al ser expuesto al calor en forma de radiación infrarroja. Si la cantidad de radiación es notable el cristal cambia, aumenta la carga y puede ser medida con un sensible dispositivo FET construido dentro del sensor. Rango de 8 a 14 micras donde es mas sensible a la radiación del cuerpo humano

35
Comunmente usado en sensores de presencia. Facilidad de uso
Comunmente usado en sensores de presencia. Facilidad de uso. Precio bajo.

36
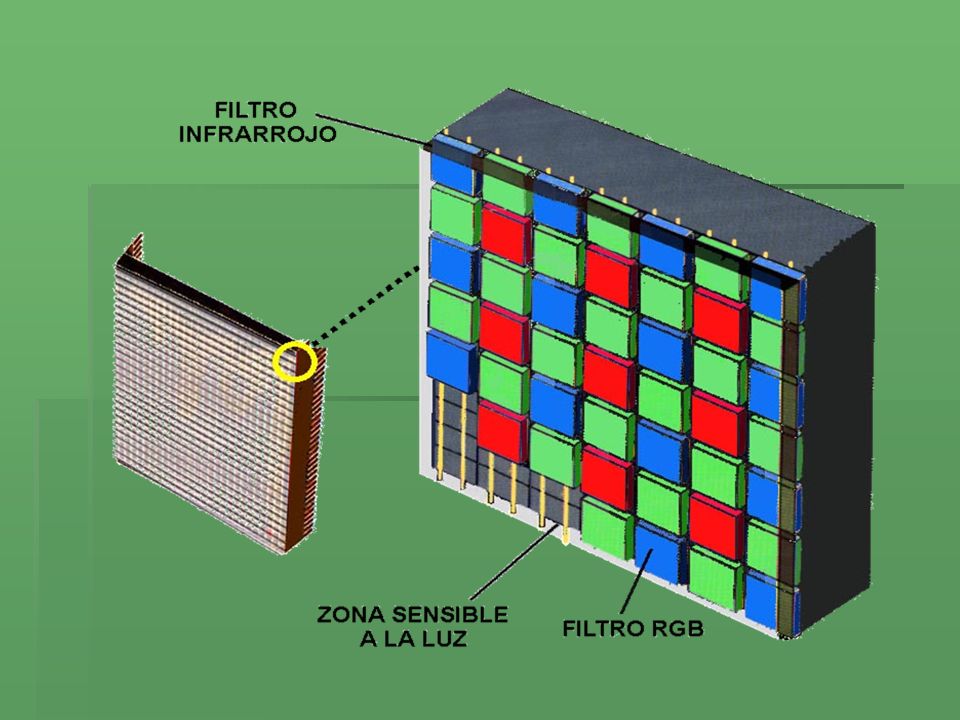
CCD (CHARGE COUPLED DEVICE)
SENSORES DE IMAGEN CCD (CHARGE COUPLED DEVICE)
")
38
COMO SE USAN EN LOS ROBOTS
Por medio de Camaras. Sistemas de inspección de productos. Sistemas relacionados con visión automática. No estan sujetos a una morfologia especifica.

40
EL SENSOR INCORPORADO A LA CAMARA POR SI SOLO NO PUEDE EJECUTAR FUNCIONES
ACCION O RESPUESTA

41
Los sistemas de "visión" dependen de tipos especiales de luz y otras técnicas para poder producir una imagen que el robot pueda interpretar. Los sistemas de visión computarizada que distinguen siluetas en blanco y negro están en uso desde hace tiempo. Estos sistemas dependen de iluminación especial y otras técnicas para producir imágenes de alto contraste. Sistemas más avanzados de visión pueden reconocer formas, deducir detalles de áreas sombreadas, determinar distancias y "ver" en tres dimensiones mediante visión estereoscópica

42
FIBRA OPTICA Uso extendido en robótica
Líneas de control para Robots exploradores Cámaras con luz integrada Sensores de posicionamiento Líneas de producción automatizadas

43
Lente focalizadora Punto de luz de tan solo 0,2 mm de diámetro con una distancia de detección de 7 mm. Para detectar objetos diminutos o posicionamiento de alta precisión. Fibra de detección de área La FU-12 con un área de detección de 10 mm de ancho es apropiada para detectar objetos en vibración o muy reducidos. Se puede detectar con precisión objetos de hasta 1,2 mm de diámetro Deteccion de microchips Una detección fiable aumenta la disponibilidad de las líneas y mejora la producción

44
Sensores de flexión para manipulacion remota, animación o aplicaciones de realidad virtual.

45
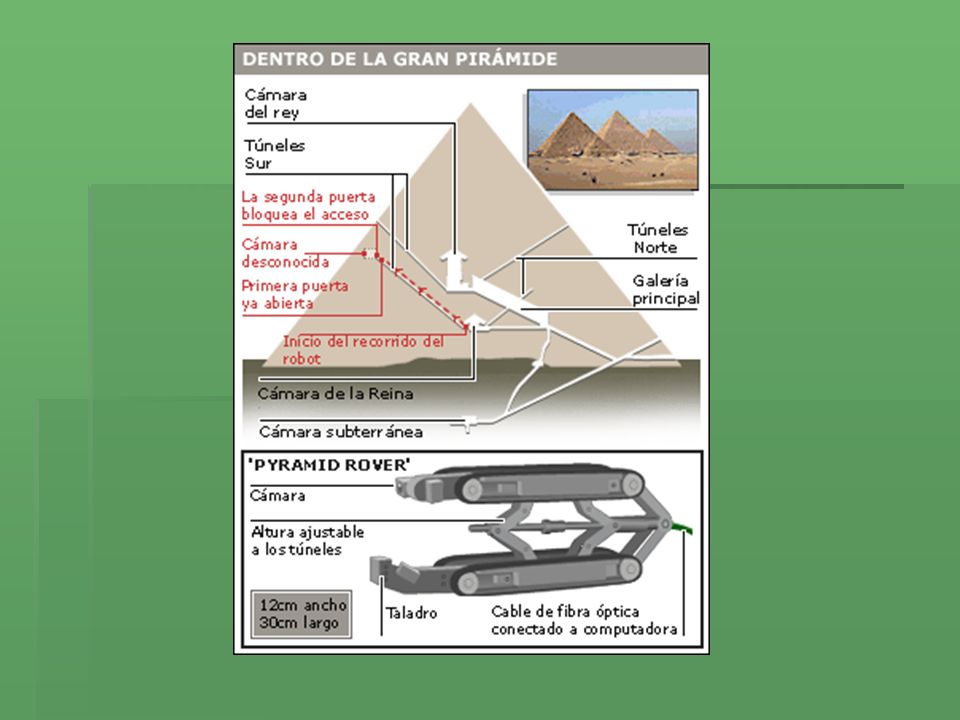
PYRAMID ROVER

47
MEDICINA LAPAROSCOPIA, TELECIRUGIA
El robot debe de ejecutar la funciones a modo esclavo, la importancia del sistema no solo es su precisión, sino la posibilidad de que el sistema de cámaras proporcione una imagen nitida, aumentada y en algunos casos en 3 dimensiones.

48
El robot introduce una sonda de fibra optica teledirigida, es el unico contacto entre el cirujano y el paciente.

49
NUEVOS CONCEPTOS

50
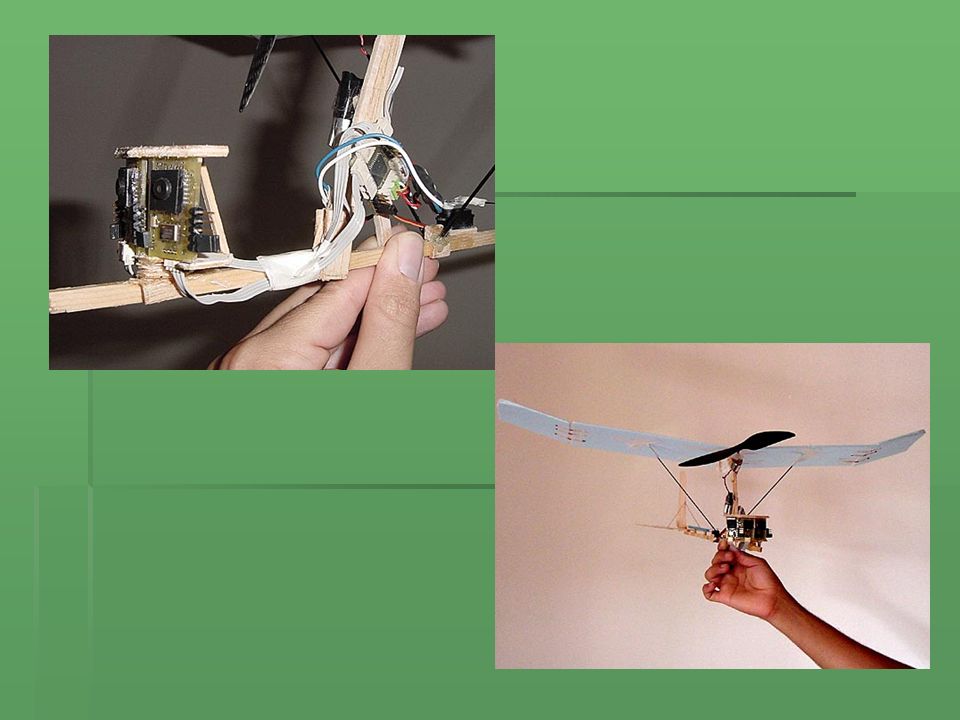
INSECTOS

51
Volar, buscar, escapar e incluso perseguir.
Sistemas Biológicos y Biomiméticos Controlados de la Darpa Se desarrollan una nueva clase de vehículos aéreos no tripulados. (UAV, por sus iniciales en inglés) Volar, buscar, escapar e incluso perseguir.
 Volar, buscar, escapar e incluso perseguir.")
52
"El principio consiste sencillamente en que si el insecto vuela describiendo una línea recta, los objetos próximos parecerían pasar mucho más rápido en el ojo que los objetos que están alejados“ "De ese modo, la distancia a un objeto puede deducirse a partir de la velocidad de su imagen en el ojo: cuanto mayor es la velocidad, más cerca se encuentra el objeto".

53
Los sensores de flujo óptico captan y procesan imágenes en forma simultánea.

56
OTROS MATERIALES

57
No solo son aplicables a la robótica, sino a la electrónica cotidiana y de servicio.
Conocer para aplicar.

58
LEP (Light-Emitting Polymers)
POLÍMEROS LUMINISCENTES Laboratorio Cavendish de Cambridge 1989 Son polímeros que al pasar una corriente eléctrica emiten luz y polímeros de distinta composición química producen distintos colores.

60
CONCLUSIONES

62
¡¡¡¡GRACIAS!!!!

Presentaciones similares