Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Control Digital/Avanzado Sistemas Analógicos/Discretos
M. en C. Luis Adrián Lizama Pérez

19
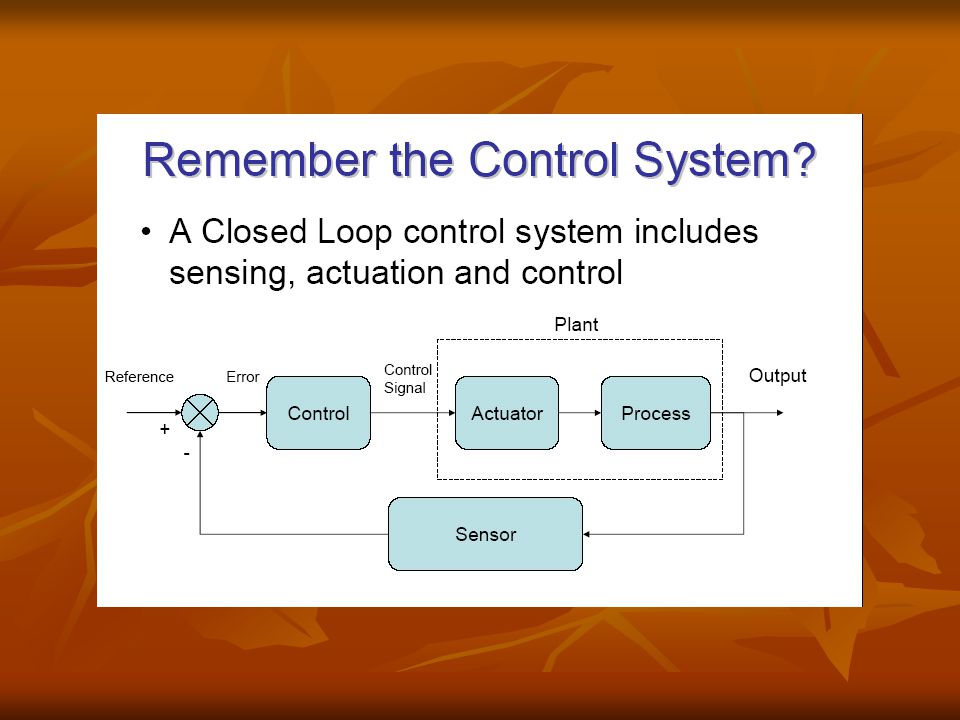
Sistemas Analógicos Se usan para procesar señales analógicas y se describen empleando ecuaciones diferenciales La clase de sistemas lineales invariantes en el tiempo también se pueden describir por su respuesta al impulso

20
Definiciones Un sistema físico es una interconexión de dispositivos y elementos sujetos a leyes físicas Un sistema analógico es un sistema de tiempo continuo La señal que se va a procesar se llama excitación y la señal procesada se llama respuesta

21
Modelar un sistema significa abstraer las características del sistema
Una especificación del sistema requiere una descripción en términos de su estructura y la otra por su nivel de energía o estado (estado aterrizado, relajado, cero). Aquí se emplean métodos de variables de estado El comportamiento del sistema depende no sólo de la energía en un instante. Los valores iniciales de las variables de estado definen las condiciones iniciales
. Aquí se emplean métodos de variables de estado. El comportamiento del sistema depende no sólo de la energía en un instante. Los valores iniciales de las variables de estado definen las condiciones iniciales.")
22
Operadores en tiempo contínuo
Una ecuación se basa en operadores Un operador es una regla o un conjunto de instrucciones (un procedimiento) que nos dice como transformar una función en otra: Ej: el operador sd/dt transforma una función de x(t) a y(t)=s{x(t)}
 que nos dice como transformar una función en otra: Ej: el operador sd/dt transforma una función de x(t) a y(t)=s{x(t)}")
23
Un operador se representa por el símbolo O, O{x(t)}=y(t)
Ej: La operación O{}=4d/dt{}+6 indica que para obtener y(t), debemos derivar x(t), multiplicar por 4 y sumar 6 al resultado para obtener 4d/dt{x(t)}+6=4dx(t)/dt+6=y(t)
, debemos derivar x(t), multiplicar por 4 y sumar 6 al resultado para obtener 4d/dt{x(t)}+6=4dx(t)/dt+6=y(t)")
24
Operadores lineales Operador aditivo:
O{x1(t) + x2(t)}=O{x1(t)} + O{x2(t)} Operador homogéneo: O{kx(t)}=kO{x(t)} Las dos operaciones juntas describen el principio de superposición: O{Ax1(t) + Bx2(t)}=AO{x1(t)} + BO{x2(t)}
 + x2(t)}=O{x1(t)} + O{x2(t)} Operador homogéneo: O{kx(t)}=kO{x(t)} Las dos operaciones juntas describen el principio de superposición: O{Ax1(t) + Bx2(t)}=AO{x1(t)} + BO{x2(t)}")
25
Ej: Considere el operador O{}=log{}
Puesto que log(Kx) Klogx, el operador no es lineal, porque no es homgéneo Ej: Considere el operador O{}=C{}+D Aplicando la prueba de homogeneidad O{Ax(t)}=ACx(t)+D pero AO{x(t)}=A(Cx(t)+D) Las dos difieren, la operación no es lineal
 Klogx, el operador no es lineal, porque no es homgéneo. Ej: Considere el operador O{}=C{}+D. Aplicando la prueba de homogeneidad. O{Ax(t)}=ACx(t)+D pero AO{x(t)}=A(Cx(t)+D) Las dos difieren, la operación no es lineal.")
26
Clasificación de sistemas contínuos
Los sistemas se modelan por ecuaciones diferenciales y relacionan la salida y(t) con la entrada x(t): y(n)(t)+a1y(n-1)(t)+…+any(1) (t) = b0x(m)(t)+b1x(m-1)(t)+…+bmx(m)(t) El orden n describe la derivada más alta de la salida y(t). Los coeficientes pueden ser funciones de x(t) y/o y(t)
 con la entrada x(t): y(n)(t)+a1y(n-1)(t)+…+any(1) (t) = b0x(m)(t)+b1x(m-1)(t)+…+bmx(m)(t) El orden n describe la derivada más alta de la salida y(t). Los coeficientes pueden ser funciones de x(t) y/o y(t)")
27
Usando el operador derivada skdk/dt con s01, se puede expresar esta ecuación en notación de operadores como {sn + a1sn-1 +…+ ans1}y(t) = {b0sm + b1sm-1 +…+bm}x(t)
 = {b0sm + b1sm-1 +…+bm}x(t)")
28
Linealidad Un sistema lineal es aquel para el cual se aplica la superposición e implica: El sistema de ecuaciones debe incluir sólo operadores lineales No debe contener fuentes internas independientes Debe ser relajado (c.i.=0)
")
29
¿Qué hace a un sistema no lineal?
Elementos no lineales Condiciones iniciales distintas de cero Fuentes internas

30
Linealidad a partir de la relación entrada-salida

31
Invariante en el tiempo
Implica que la forma de la respuesta y(t) depende sólo de la forma de la entrada x(t) y no del tiempo en el que se aplica: O{x(t-t0)}=y(t-t0)
 depende sólo de la forma de la entrada x(t) y no del tiempo en el que se aplica: O{x(t-t0)}=y(t-t0)")
32
Ej: y(t)=x(t)x’(t) es no lineal pero invariante en el tiempo
La operación es O{}=({})(d/dt{}) A O{x(t)}=A[x(t)x’(t)], pero O{Ax(t)}=[Ax(t)][Ax’(t)]. No son iguales Ej: y(t)=x(t) es lineal pero variante en el tiempo. Con t t, vemos que AO{x(t)}=A[x(t)] y O{Ax(t)}=Ax(t) son iguales
(d/dt{}) A O{x(t)}=A[x(t)x’(t)], pero. O{Ax(t)}=[Ax(t)][Ax’(t)]. No son iguales. Ej: y(t)=x(t) es lineal pero variante en el tiempo. Con t t, vemos que AO{x(t)}=A[x(t)] y O{Ax(t)}=Ax(t) son iguales.")
33
Escala de tiempo (comprimida por 2) Retraso 2 unidades
x(t) 4 1 y1(t) 2 1 y1(t-2) 2 1 4 Escala de tiempo (comprimida por 2) Retraso 2 unidades x(t-2) y2(t) 1 1 Escala de tiempo (comprimida por 2) No es lo mismo 2 6 1 3
 y1(t) y1(t-2) Escala de tiempo (comprimida por 2) Retraso 2 unidades. x(t-2) y2(t) Escala de tiempo (comprimida por 2) No es lo mismo")
34
Ej: y(t)=tx(t) es lineal, pero variante en el tiempo.
La operación es O{}=t{} AO{x(t)}=A[tx(t)] y O{Ax(t)}=t[Ax(t)] son iguales Ej: y(t)=ex(t)x(t) es no lineal pero invariante en el tiempo. La operación es O{}=e{}{} AO{x(t)}=Aex(t)x(t) pero O{Ax(t)}=eAx(t) [Ax(t)] No son iguales O{x(t-t0)}=ex(t-t0)x(t-t0) y y(t-t0)=ex(t-t0)x(t-t0). Iguales
}=A[tx(t)] y O{Ax(t)}=t[Ax(t)] son iguales. Ej: y(t)=ex(t)x(t) es no lineal pero invariante en el tiempo. La operación es O{}=e{}{} AO{x(t)}=Aex(t)x(t) pero O{Ax(t)}=eAx(t) [Ax(t)] No son iguales. O{x(t-t0)}=ex(t-t0)x(t-t0) y y(t-t0)=ex(t-t0)x(t-t0). Iguales.")
35
Sistemas LTI Se describen con ecuaciones diferenciales con coeficientes constantes. Para probar no linealidad o invariante en el tiempo verificamos que: Los términos contienen productos de la entrada y/o salida. Un término constante hace no lineal a una ecuación Los coeficientes de la entrada o la salida que son funciones explícitas de t, hacen variante al sistema o bien las entradas o salidas escaladas en el tiempo, como y(2t)
")
36
Ejemplos: y’(t)-2y(t) = 4x(t). Es LTI y’’(t) – 2ty’(t) = x(t). Es lineal, pero variante y’(t) + 2y2(t) = 2x’(t) – x(t). No lineal, invariante y’(t) – 2y(t) = ex(t)x(t). No lineal, invariante y’(t) – 4y(t)y(2t) = x(t). No lineal y variante
 – 2y(t) = ex(t)x(t). No lineal, invariante. y’(t) – 4y(t)y(2t) = x(t). No lineal y variante.")
37
- + 2H i(t) v(t) + 3i2(t) - 3 2H i(t) v(t) i(t) 3 2H v(t) 4V 3t 2H
- + 4V 3t 2H i(t) v(t)
 v(t)")
38
Implicaciones de LTI La representación de una señal arbitraria x(t), como: Una suma ponderada de impulsos, es la base para el método de convolución Una combinación lineal de armónicas es la base de la serie de Fourier Una serie ponderada de exponenciales complejas es la base de la Transformada de Fourier y Laplace

39
Causalidad Un sistema causal o no anticipativo es aquel para el que la respuesta presente no depende de valores futuros de la entrada Una ecuación describe un sistema no causal, si los términos de la salida tienen un argumento de la forma y(t) y un término de la entrada tiene el argumento x(t+)
 y un término de la entrada tiene el argumento x(t+)")
40
Memoria En un sistema dinámico o con memoria, se caracteriza por ecuaciones diferenciales donde la respuesta presente depende de entradas presentes y pasadas (debido a elementos almacenadores de energía) Por contrario, en los sistemas estáticos (como circuitos resistivos que operan en estado estacionario) la respuesta depende sólo del valor instantáneo de la entrada
 Por contrario, en los sistemas estáticos (como circuitos resistivos que operan en estado estacionario) la respuesta depende sólo del valor instantáneo de la entrada.")
41
Ej: y’’(t) + 2ty’(t) = x(t), causal y dinámico
y(t) = x(t) + 3, causal e instantáneo, no lineal y(t) = 2(t+1)x(t), causal e instantáneo, variante y’(t) + 2y(t) = x(t+5), anticausal y dinámico y’(t+4) + 2y(t) = x(t+2), causal y dinámico y(t) = x(t+2), anticausal y dinámico (los argumentos de x y y difieren) y(t) = 2x(t), causal e instantáneo si =1, causal y dinámico si <1, no causal y dinámico si >1
 = x(t) + 3, causal e instantáneo, no lineal. y(t) = 2(t+1)x(t), causal e instantáneo, variante. y’(t) + 2y(t) = x(t+5), anticausal y dinámico. y’(t+4) + 2y(t) = x(t+2), causal y dinámico. y(t) = x(t+2), anticausal y dinámico (los argumentos de x y y difieren) y(t) = 2x(t), causal e instantáneo si =1, causal y dinámico si <1, no causal y dinámico si >1.")
42
Análisis de Sistemas LTI
Se pueden analizar por medio de: Ecuaciones diferenciales: Sistemas no lineales y variantes en el tiempo, sistemas LTI. Su desventaja es que a medida que se incrementa el orden del sistema, las ecuaciones se vuelven difíciles Variables de estado: describe un sistema de orden n, con n ecuaciones simultáneas de primer orden: sistemas no lineales, entradas y salidas múltiples. Para sistemas lineales se aplican métodos matriciales Respuesta al impulso h(t): sistemas LTI relajados, la respuesta se obtiene de la suma de convolución
: sistemas LTI relajados, la respuesta se obtiene de la suma de convolución.")
43
Sistemas LTI con ecuaciones diferenciales
Una ecuación diferencial de orden n requiere n condiciones iniciales para su solución completa El método de coeficientes indeterminados conduce a la respuesta como la suma de la respuesta natural yN(t) y la respuesta forzada yF(t)
 y la respuesta forzada yF(t)")
44
Respuesta natural La forma de la respuesta natural depende sólo de los detalles del sistema y es independiente de la entrada Es una suma de exponenciales cuyos exponentes son las raíces de la ecuación característica: y(n)(t) + a1y(n-1)(t) + …+ an-1y(1)(t) + any(t) = x(t) {a0sn + a1sn-1 + …+ an-1s + an} = x(t) a0sn + a1sn-1 + …+ an-1s + an=0
(t) + a1y(n-1)(t) + …+ an-1y(1)(t) + any(t) = x(t) {a0sn + a1sn-1 + …+ an-1s + an} = x(t) a0sn + a1sn-1 + …+ an-1s + an=0.")
45
Respuesta forzada Es producto de la interacción del sistema con la entrada y depende de ésta y del sistema La respuesta total se obtiene sumando primero las respuestas forzada y natural y después evaluando las constantes indeterminadas (en la componente natural), usando las c.i. dadas
, usando las c.i. dadas.")
46
La ec. característica es s+2=0, la raíz s=-2
Ej: Considere el sistema de primer orden y’(t) + 2y(t) = x(t). Encuentre su respuesta si x(t)=6, y(0)=8 La ec. característica es s+2=0, la raíz s=-2 La resp. natural es yN(t)=Ke-2t Ya que x(t)=6 es constante, yF(t)=C y’F(t)=0 y y’F(t) + 2yF(t)=2C=6, yF(t)=C=3 La respuesta total es y(t)=yN(t)+yF(t)= Ke-2t + 3 Con y(0)=8, 8=K+3, K=5 y y(t)= 5e-2t +3=(5e-2t +3)u(t)
 + 2y(t) = x(t). Encuentre su respuesta si x(t)=6, y(0)=8. La ec. característica es s+2=0, la raíz s=-2. La resp. natural es yN(t)=Ke-2t. Ya que x(t)=6 es constante, yF(t)=C. y’F(t)=0 y y’F(t) + 2yF(t)=2C=6, yF(t)=C=3. La respuesta total es y(t)=yN(t)+yF(t)= Ke-2t + 3. Con y(0)=8, 8=K+3, K=5 y y(t)= 5e-2t +3=(5e-2t +3)u(t)")
47
La respuesta de estado cero
Se describe la respuesta y(t) de un sistema LTI como la suma de su respuesta de estado cero (ZSR), suponiendo condiciones iniciales cero y su respuesta de entrada cero (ZIR) Cada componente se encuentra usando el método de coeficientes indeterminados Las respuestas de estado cero y entrada cero obedecen a la superposición
 de un sistema LTI como la suma de su respuesta de estado cero (ZSR), suponiendo condiciones iniciales cero y su respuesta de entrada cero (ZIR) Cada componente se encuentra usando el método de coeficientes indeterminados. Las respuestas de estado cero y entrada cero obedecen a la superposición.")
48
Ej: Considere y’’(t)+3y’(t)+2y(t)=x(t), con x(t)=4e-3t y c. i
Ej: Considere y’’(t)+3y’(t)+2y(t)=x(t), con x(t)=4e-3t y c.i. y(0)=3, y y’(0)=4. Encuentre su respuesta de entrada cero y de estado cero La ec. característica es s2+3s+2=0, raíces s1=-1 y s2=-2. La respuesta natural es yN(t)=K1es1t + K2es2t = K1e-t + K2e-2t La respuesta de entrada cero se encuentra de yN(t) y las c.i. yzi(t)= K1e-t +K2e-2t yzi(0)= K1+K2=3 y’zi(0)= -K1-2K2=4, K2=-7, K1=10 yzi(t)= 10e-t -7e-2t
+3y’(t)+2y(t)=x(t), con x(t)=4e-3t y c.i. y(0)=3, y y’(0)=4. Encuentre su respuesta de entrada cero y de estado cero. La ec. característica es s2+3s+2=0, raíces s1=-1 y s2=-2. La respuesta natural es yN(t)=K1es1t + K2es2t = K1e-t + K2e-2t. La respuesta de entrada cero se encuentra de yN(t) y las c.i. yzi(t)= K1e-t +K2e-2t yzi(0)= K1+K2=3. y’zi(0)= -K1-2K2=4, K2=-7, K1=10. yzi(t)= 10e-t -7e-2t.")
49
yzs(t) se encuentra de la forma general de y(t) pero c.i.=0
Ya que x(t)=4e-3t, se tiene yF(t)=Ce-3t Entonces y’F(t)=-3Ce-3t, y’’F(t)=9Ce-3t y’’F(t) + 3y’F(t) + 2yF(t)=(9C - 9C + 2C) e-3t = 4e-3t Así C=2, yF(t)= 2e-3t y yzs(t)=K1e-t + K2e-2t + 2e-3t Con c.i. se obtiene yzs(0)=K1+K2+2 = 0, y’zs(0)=-K1-2K2-6=0, Que resulta K2=-4, K1=2, y yzs(t)=2e-t -4e-2t +2e-3t La respuesta total es la suma de yzi(t) y yzs(t) y(t) = yzi(t) + yzs(t) = 12e-t -11e-2t +2e-3t , t0
=4e-3t, se tiene yF(t)=Ce-3t. Entonces y’F(t)=-3Ce-3t, y’’F(t)=9Ce-3t. y’’F(t) + 3y’F(t) + 2yF(t)=(9C - 9C + 2C) e-3t = 4e-3t. Así C=2, yF(t)= 2e-3t y yzs(t)=K1e-t + K2e-2t + 2e-3t. Con c.i. se obtiene yzs(0)=K1+K2+2 = 0, y’zs(0)=-K1-2K2-6=0, Que resulta K2=-4, K1=2, y yzs(t)=2e-t -4e-2t +2e-3t. La respuesta total es la suma de yzi(t) y yzs(t) y(t) = yzi(t) + yzs(t) = 12e-t -11e-2t +2e-3t , t0.")
51
Respuesta al impulso La respuesta al impulso se denota por h(t) y constituye la respuesta de un sistema LTI relajado a un impulso unitario (t) Los métodos en el dominio del tiempo son tediosos, por lo que es más fácil si se acude al dominio transformado Impulso de entrada (t) Sistema LTI relajado Respuesta al impulso h(t)
 Sistema LTI relajado. Respuesta al impulso h(t)")
52
h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt
La respuesta al impulso h(t) es la derivada de la respuesta al escalón s(t): h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt Un impulso produce un cambio súbito de estado (condiciones iniciales) Resolver y’(t)+y(t)=(t), y(0)=0 es equivalente a y’’(t)+y(t)=0 , y(0)=1 t -
 es la derivada de la respuesta al escalón s(t): h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt. Un impulso produce un cambio súbito de estado (condiciones iniciales) Resolver y’(t)+y(t)=(t), y(0)=0 es equivalente a y’’(t)+y(t)=0 , y(0)=1. t. -")
53
De manera similar un sistema de segundo orden y’’(t)+1y’(t)+2y’(t)=x(t), puede encontrarse mediante la ec. homogénea y’’(t)+1y’(t)+2y’(t)=0, c.i. y(0)=0, y’(0)=1 Ej: Sea y’(t) + 2y(t) = x(t), la ec. característica es s+2=0, raíz s=-2, la respuesta natural es h(t)=Ke-2t con h(0)=1, se obtiene h(0)=K=1, y h(t)=e-2tu(t) Ej: Sea y’’(t) + 3y’(t) + 2y(t) = x(t), la ec. característica es s2+3s+2=0, raíces s1=-1, s2=-2, la respuesta natural es h(t)=K1e-2t + K2e-2t, con h(0)=0, h’(0)=-K1-2K2=1, de donde K1=1 y K2=-1, entonces h(t)=(e-t - e-2t)u(t)
 + 2y(t) = x(t), la ec. característica es s+2=0, raíz s=-2, la respuesta natural es h(t)=Ke-2t. con h(0)=1, se obtiene h(0)=K=1, y h(t)=e-2tu(t) Ej: Sea y’’(t) + 3y’(t) + 2y(t) = x(t), la ec. característica es s2+3s+2=0, raíces s1=-1, s2=-2, la respuesta natural es h(t)=K1e-2t + K2e-2t, con h(0)=0, h’(0)=-K1-2K2=1, de donde K1=1 y K2=-1, entonces h(t)=(e-t - e-2t)u(t)")
54
Estabilidad En el dominio del tiempo, la estabilidad de entrada acotada, salida acotada (BIBO) implica que cada entrada acotada resulta en una salida acotada Las condiciones de estabilidad se pueden determinar de la ecuación característica: Cada raíz debe tener una parte real negativa y la derivada más alta de la entrada no debe exceder a la de la salida
 implica que cada entrada acotada resulta en una salida acotada. Las condiciones de estabilidad se pueden determinar de la ecuación característica: Cada raíz debe tener una parte real negativa y la derivada más alta de la entrada no debe exceder a la de la salida.")
55
Las raíces con partes reales negativas aseguran que la respuesta natural (y de entrada cero) siempre decae con el tiempo y la respuesta forzada (y de estado cero) siempre permanece acotada para una entrada acotada Las raíces con parte real igual a cero hacen al sistema inestable. Las raíces simples (no repetidas) con partes reales iguales a cero producen una respuesta natural constante (o senoidal) que es acotada, pero si la entrada es una constante o una senoide, la respuesta forzada es una rampa o senoide creciente
 con partes reales iguales a cero producen una respuesta natural constante (o senoidal) que es acotada, pero si la entrada es una constante o una senoide, la respuesta forzada es una rampa o senoide creciente.")
56
Las raíces repetidas con parte real igual a cero producen una respuesta que es un polinomio o senoide creciente Ej: El sistema y’’(t) +3y’(t)+2y(t)= x(t) es estable ya que las raíces de su ecuación característica s2+3s+2=0 son s=-1, -2 y tienen partes reales neg El sistema y’’(t) +3y’(t)= x(t) es inestable. Las raíces de su ec. Característica s2+3s=0 son s=0,-3 una de las raíces no tiene una parte real negativa. Aunque su respuesta natural es acotada, la entrada escalón produce una respuesta forzada de la forma Ctu(t) que no es acotada
 +3y’(t)+2y(t)= x(t) es estable ya que las raíces de su ecuación característica s2+3s+2=0 son s=-1, -2 y tienen partes reales neg. El sistema y’’(t) +3y’(t)= x(t) es inestable. Las raíces de su ec. Característica s2+3s=0 son s=0,-3 una de las raíces no tiene una parte real negativa. Aunque su respuesta natural es acotada, la entrada escalón produce una respuesta forzada de la forma Ctu(t) que no es acotada.")
57
El sistema y’’’(t) +3y’’(t) = x(t) es inestable
El sistema y’’’(t) +3y’’(t) = x(t) es inestable. Las raíces de su ecuación s3+3s2=0 son s1=0, s2=0 y s3=-3 que producen la respuesta natural yN(t)=Au(t) + Btu(t) + Ce-3tu(t) que es no acotada
 +3y’’(t) = x(t) es inestable. Las raíces de su ecuación s3+3s2=0 son s1=0, s2=0 y s3=-3 que producen la respuesta natural yN(t)=Au(t) + Btu(t) + Ce-3tu(t) que es no acotada.")
58
Sistemas Discretos Se describen por medio de ecuaciones de diferencias que relacionan la entrada y la salida Los sistemas lineales invariantes en el tiempo, pueden describirse por su respuesta al impulso

59
Operadores en tiempo discreto
El sistema descrito por y[n]=y[n-1]+x[n], produce la salida presente y[n] como la suma de la salida anterior y[n-1] y la entrada presente x[n] Un retraso unitario se representa mediante el operador de retraso z-1 y transforma x[n] en x[n-1]: z-1{x[n]}=x[n-1] zk {x[n]}=x[n+k]

60
Un operador permite la transformación de una función en otra:
Un operador permite la transformación de una función en otra: O{x[n]}=y[n] Ej: La operación O{}=4z3{}+6 indica que para obtener y[n], debemos avanzar x[n] 3 unidades, multiplicar por 4 y sumar 6 al resultado para obtener z3{}+6= 4x[n+3]+6=y[n]

61
Operadores lineales Operador aditivo:
O{x1[n] + x2[n]}=O{x1[n]} + O{x2[n]} Operador homogéneo: O{kx[n]}=kO{x[n]} Las dos operaciones juntas describen el principio de superposición: O{Ax1[n] + Bx2[n]}=AO{x1[n]} + BO{x2[n]}

62
Ej: Considere el operador O{}=C{}+D
Aplicando la prueba de homogeneidad O{Ax[n]}=C(Ax[n])+D pero AO{x[n]}=A(Cx[n]+D) Las dos difieren, la operación no es lineal Ej: Considere el operador O{}={}2 AO{x[n]}=A x2[n] pero O{Ax[n]}=A2x2[n] Las dos difieren, la op. cuadrática no es lineal
+D pero. AO{x[n]}=A(Cx[n]+D) Las dos difieren, la operación no es lineal. Ej: Considere el operador O{}={}2. AO{x[n]}=A x2[n] pero O{Ax[n]}=A2x2[n] Las dos difieren, la op. cuadrática no es lineal.")
63
Clasificación de sistemas
Los sistemas discretos modelados por ecuaciones de diferencias relacionan la salida y[n] con la entrada x[n]: y[n]+A1y[n-1]+…+ANy[n-N] = B0x[n]+B1x[n-1]+…+BMx[n-M] El orden N describe el término de salida con el retraso mayor

64
Linealidad Un sistema lineal es aquel para el cual se aplica la superposición e implica que el sistema está relajado (c.i.=0) y que la ecuación del sistema contiene sólo operadores lineales
 y que la ecuación del sistema contiene sólo operadores lineales.")
65
Invariante en el tiempo
Implica que la forma de la respuesta y[n] depende únicamente de la forma de la entrada x[n] y no del tiempo en el que se aplica: O{x[n-n0]}=y[n-n0]

66
Ej: y[n]=x[n]x[n-1] es no lineal, pero invariante en el tiempo
Ej: y[n]=x[n]x[n-1] es no lineal, pero invariante en el tiempo. La operación es O{}=({})(z-1{}) A O{x[n]}=A(x[n]x[n-1]), pero O{Ax[n]}=(Ax[n])(Ax[n-1]). No son iguales O{x[n-n0]}=x[n-n0]x[n-n0-1] y y[n-n0]=x[n-n0]x[n-n0-1]. Son iguales
![Ej: y[n]=x[n]x[n-1] es no lineal, pero invariante en el tiempo](http://slideplayer.es/slide/4302735/14/images/66/Ej%3A+y%5Bn%5D%3Dx%5Bn%5Dx%5Bn-1%5D+es+no+lineal%2C+pero+invariante+en+el+tiempo.jpg "Ej: y[n]=x[n]x[n-1] es no lineal, pero invariante en el tiempo. La operación es O{}=({})(z-1{}) A O{x[n]}=A(x[n]x[n-1]), pero. O{Ax[n]}=(Ax[n])(Ax[n-1]). No son iguales. O{x[n-n0]}=x[n-n0]x[n-n0-1] y. y[n-n0]=x[n-n0]x[n-n0-1]. Son iguales.")
67
Ej: y[n]=nx[n] es lineal, pero variante en el tiempo.
La operación es O{}=n{} Ej: y[n]=x[2n] es lineal pero variante en el tiempo. La operación n2n conduce a: AO{x[n]}=A(x[2n]) y O{Ax[n]}=Ax[2n] Iguales O{x[n-n0]}=x[2n-n0], pero y[n-n0]=x[2(n-n0)]. No son iguales
![Ej: y[n]=nx[n] es lineal, pero variante en el tiempo.](http://slideplayer.es/slide/4302735/14/images/67/Ej%3A+y%5Bn%5D%3Dnx%5Bn%5D+es+lineal%2C+pero+variante+en+el+tiempo..jpg "La operación es O{}=n{} Ej: y[n]=x[2n] es lineal pero variante en el tiempo. La operación n2n conduce a: AO{x[n]}=A(x[2n]) y O{Ax[n]}=Ax[2n] Iguales. O{x[n-n0]}=x[2n-n0], pero. y[n-n0]=x[2(n-n0)]. No son iguales.")
68
Sistemas LTI Para probar no linealidad o invariante en el tiempo verificamos que: Los términos contienen productos de la entrada y/o salida. Un término constante hace no lineal a una ecuación Los coeficientes de la entrada o la salida que son funciones explícitas de n hacen variante al sistema, o bien las entradas o salidas escaladas en el tiempo, como y[2n]

69
Ejemplos: y[n]-2y[n-1]=4x[n]. Es lineal e invariante y[n]-2ny[n-1]=x[n]. Es lineal, variante y[n]+2y2[n]=2x[n] – x[n-1]. No lineal, invariante y[n]-2y[n-1]=2x[n]x[n]. No lineal, invariante y[n]-4y[n]y[2n]=x[n]. No lineal, variante
![Ejemplos: y[n]-2y[n-1]=4x[n]. Es lineal e invariante. y[n]-2ny[n-1]=x[n]. Es lineal, variante. y[n]+2y2[n]=2x[n] – x[n-1]. No lineal, invariante.](http://slideplayer.es/slide/4302735/14/images/69/Ejemplos%3A+y%5Bn%5D-2y%5Bn-1%5D%3D4x%5Bn%5D.+Es+lineal+e+invariante.+y%5Bn%5D-2ny%5Bn-1%5D%3Dx%5Bn%5D.+Es+lineal%2C+variante.+y%5Bn%5D%2B2y2%5Bn%5D%3D2x%5Bn%5D+%E2%80%93+x%5Bn-1%5D.+No+lineal%2C+invariante..jpg "y[n]-2y[n-1]=2x[n]x[n]. No lineal, invariante. y[n]-4y[n]y[2n]=x[n]. No lineal, variante.")
70
Implicaciones de LTI La representación de una señal arbitraria x[n] como una suma ponderada de impulsos DT desplazados, base del método de convolución La representación de una señal x[n] como una combinación lineal de armónicos DT o exponenciales complejas, base de la transformada de Fourier

71
Causalidad En un sistema causal, la respuesta presente y[n] no depende de valores futuros de la entrada, tal como x[n+2], de otro modo es no causal Es no causal, si el término de la salida menos retrasada es y[n] y si está presente en la entrada un término como x[n+k], k>0 Ej: y[n]-2y[n-2] = x[n] es causal y[n+1] – y[n] = x[n+1] es causal y[n] – 2y[n-2] = x[n+1] es no causal y[n+1] – y[n] = x[n+2] es no causal
![Causalidad En un sistema causal, la respuesta presente y[n] no depende de valores futuros de la entrada, tal como x[n+2], de otro modo es no causal.](http://slideplayer.es/slide/4302735/14/images/71/Causalidad+En+un+sistema+causal%2C+la+respuesta+presente+y%5Bn%5D+no+depende+de+valores+futuros+de+la+entrada%2C+tal+como+x%5Bn%2B2%5D%2C+de+otro+modo+es+no+causal..jpg "Es no causal, si el término de la salida menos retrasada es y[n] y si está presente en la entrada un término como x[n+k], k>0. Ej: y[n]-2y[n-2] = x[n] es causal. y[n+1] – y[n] = x[n+1] es causal. y[n] – 2y[n-2] = x[n+1] es no causal. y[n+1] – y[n] = x[n+2] es no causal.")
72
Memoria Si la respuesta de un sistema en tiempo n=n0 depende de la entrada al tiempo n=n0 y no de cualquier otro tiempo (pasado o futuro) se llama instantáneo o estático La entrada y la salida poseen argumentos idénticos Los sistemas dinámicos se describen con ecuaciones de diferencias y la respuesta depende de entradas pasadas y/o futuras
 se llama instantáneo o estático. La entrada y la salida poseen argumentos idénticos. Los sistemas dinámicos se describen con ecuaciones de diferencias y la respuesta depende de entradas pasadas y/o futuras.")
73
Ej: y[n] + A1y[n-1] + …+ ANy[n-N] = x[n+k] es causal para k0, también es dinámico
y[n+N] + A1y[n+N-1] + A2y[n+N-2] …+ ANy[n] = x[n+k] es causal para kN y dinámico y[n]=x[n+2] es no causal y dinámico y[n+4] + y[n+3] = x[n+2] es causal y dinámico y[n] = 2x[n] es causal e instantáneo para =1, causal y dinámico si <1, y no causal y dinámico si >1. También es variante si 1
![Ej: y[n] + A1y[n-1] + …+ ANy[n-N] = x[n+k] es causal para k0, también es dinámico](http://slideplayer.es/slide/4302735/14/images/73/Ej%3A+y%5Bn%5D+%2B+A1y%5Bn-1%5D+%2B+%E2%80%A6%2B+ANy%5Bn-N%5D+%3D+x%5Bn%2Bk%5D+es+causal+para+k%EF%82%A30%2C+tambi%C3%A9n+es+din%C3%A1mico.jpg "y[n+N] + A1y[n+N-1] + A2y[n+N-2] …+ ANy[n] = x[n+k] es causal para kN y dinámico. y[n]=x[n+2] es no causal y dinámico. y[n+4] + y[n+3] = x[n+2] es causal y dinámico. y[n] = 2x[n] es causal e instantáneo para =1, causal y dinámico si <1, y no causal y dinámico si >1. También es variante si 1.")
74
Sistemas DT: Filtros digitales
Un filtro digital se describe mediante una ecuación de diferencias y[n] + A1y[n-1] + …+ ANy[n-N] = B0x[n] + B1y[n-1] + …+ BMy[n-M] Describe un filtro recursivo de orden N cuya salida depende de sus propios valores pasados y de los valores presente y pasado de la entrada (filtro IIR)
")
75
Ahora considere la ecuación:
y[n] = B0x[n] + B1y[n-1] + …+ BMy[n-M] Describe un filtro no recursivo cuya salida depende sólo de los términos de la entrada y no de los valores pasados (recursión) de la respuesta (filtro IIR)
 de la respuesta (filtro IIR)")
76
Representación Multiplicador x[n] Ax[n] A Z-1 Retraso x[n] x[n-1]
Sumador x[n] x[n-1] + y[n]
![Representación Multiplicador x[n] Ax[n] A Z-1 Retraso x[n] x[n-1]](http://slideplayer.es/slide/4302735/14/images/76/Representaci%C3%B3n+%EF%81%93+Multiplicador+x%5Bn%5D+Ax%5Bn%5D+A+Z-1+Retraso+x%5Bn%5D+x%5Bn-1%5D.jpg "Sumador. x[n] x[n-1] + y[n]")
77
Z-1 x[n] + y[n] -A1 -A2 -AN Z-1 x[n] B0 + y[n] B1 B2 BM
![Z-1 x[n] + y[n] -A1 -A2 -AN Z-1 x[n] B0 + y[n] B1 B2 BM](http://slideplayer.es/slide/4302735/14/images/77/Z-1+x%5Bn%5D+%EF%81%93+%2B+y%5Bn%5D+-A1+-A2+-AN+Z-1+x%5Bn%5D+B0+%EF%81%93+%2B+y%5Bn%5D+B1+B2+BM.jpg "Z-1 x[n] + y[n] -A1 -A2 -AN Z-1 x[n] B0 + y[n] B1 B2 BM")
78
B0 + y[n] B1 B2 BN Z-1 x[n] -A1 -A2 -AN
![B0 + y[n] B1 B2 BN Z-1 x[n] -A1 -A2 -AN](http://slideplayer.es/slide/4302735/14/images/78/B0+%EF%81%93+%2B+y%5Bn%5D+B1+B2+BN+Z-1+x%5Bn%5D+-A1+-A2+-AN.jpg "B0 + y[n] B1 B2 BN Z-1 x[n] -A1 -A2 -AN")
79
Z-1 B0 + y[n] B1 B2 BN x[n] -A1 -A2 -AN
![Z-1 B0 + y[n] B1 B2 BN x[n] -A1 -A2 -AN](http://slideplayer.es/slide/4302735/14/images/79/Z-1+B0+%EF%81%93+%2B+y%5Bn%5D+B1+B2+BN+x%5Bn%5D+-A1+-A2+-AN.jpg "Z-1 B0 + y[n] B1 B2 BN x[n] -A1 -A2 -AN")
80
Análisis de Filtros En el dominio del tiempo se usan los métodos:
Ecuaciones de diferencias: sistemas lineales, no lineales y variantes en el tiempo Respuesta al impulso h(n): sistemas LTI relajados. La salida y[n] aparece por la suma de convolución Variables de estado: sistemas de orden n con n ecuaciones de diferencias simultáneas de primer orden. Es útil para sistemas complejos o no lineales, entradas y salidas múltiples. En sistemas LTI se pueden emplear métodos matriciales
: sistemas LTI relajados. La salida y[n] aparece por la suma de convolución. Variables de estado: sistemas de orden n con n ecuaciones de diferencias simultáneas de primer orden. Es útil para sistemas complejos o no lineales, entradas y salidas múltiples. En sistemas LTI se pueden emplear métodos matriciales.")
81
Ecuaciones de diferencias
Solución por recursión: Dada una ecuación de diferencias de orden N sujeta a las condiciones iniciales y[-1], y[-2],…y[-N], se generan valores de y[0], y[1],…

82
Ej: Considere el sistema y[n]= a1y[n-1] + b0u[n] y la c.i. y[-1]=0
y[0] = a1y[-1] + b0u[0] = b0 y[1] = a1y[0] + b0u[1] = a1b0 + b0 = b0 [1 + a1] y[2] = a1y[1] + b0u[2] = a1[a1b0 + b0] = b0 [1+a1+ a12] y[n]= b0 [1+a1+ a12 + … + a1n-1 + a1n ] y[n]= b0 (1 - a1n+1) / (1- a1)
![Ej: Considere el sistema y[n]= a1y[n-1] + b0u[n] y la c.i. y[-1]=0](http://slideplayer.es/slide/4302735/14/images/82/Ej%3A+Considere+el+sistema+y%5Bn%5D%3D+a1y%5Bn-1%5D+%2B+b0u%5Bn%5D+y+la+c.i.+y%5B-1%5D%3D0.jpg "y[0] = a1y[-1] + b0u[0] = b0. y[1] = a1y[0] + b0u[1] = a1b0 + b0 = b0 [1 + a1] y[2] = a1y[1] + b0u[2] = a1[a1b0 + b0] = b0 [1+a1+ a12] y[n]= b0 [1+a1+ a12 + … + a1n-1 + a1n ] y[n]= b0 (1 - a1n+1) / (1- a1)")
83
Considere el sistema de la figura y encuentre la respuesta y[n] si x[n]=(0.4)n, n0 y c.i. y[-1]=10
Z-1 x[n] 0.6 + y[n]
![Considere el sistema de la figura y encuentre la respuesta y[n] si x[n]=(0.4)n, n0 y c.i. y[-1]=10](http://slideplayer.es/slide/4302735/14/images/83/Considere+el+sistema+de+la+figura+y+encuentre+la+respuesta+y%5Bn%5D+si+x%5Bn%5D%3D%280.4%29n%2C+n%EF%82%B30+y+c.i.+y%5B-1%5D%3D10.jpg "Z-1. x[n] y[n]")
84
Respuesta de entrada cero (ZIR) y respuesta de estado cero (ZSR)
Describe la respuesta de un sistema LTI como la suma de ZIR y ZSR: Respuesta total = ZIR (suponga entrada cero, usar CI dada) + ZSR (suponga CI cero) Ambas obedecen a la superposición: cada una se encuentra de sus propias componentes natural y forzada
 + ZSR (suponga CI cero) Ambas obedecen a la superposición: cada una se encuentra de sus propias componentes natural y forzada.")
85
Ej: Considere la ecuación x[n]=(0.4)n, n0 con y[-1]=10
La respuesta forzada y la forma de la respuesta natural son: yF[n] = -2(0.4)n y yN[n] = K(0.6)n Su ZSR se encuentra de la forma de la respuesta total yzs[n] = -2(0.4)n + K(0.6)n, con c.i.=0 yzs[-1] = 0 = -5+K/ K= yzs[n] = -2(0.4)n + 3(0.6)n, n0 Su ZIR se encuentra de la respuesta natural yzi[-1]=10= K/ K=6 yzi[n]=6(0.6)n , n0 La respuesta natural es y[n]= yzi[n] + yzs[n]= = -2(0.4)n + 9(0.6)n, n0
![Ej: Considere la ecuación x[n]=(0.4)n, n0 con y[-1]=10](http://slideplayer.es/slide/4302735/14/images/85/Ej%3A+Considere+la+ecuaci%C3%B3n+x%5Bn%5D%3D%280.4%29n%2C+n%EF%82%B30+con+y%5B-1%5D%3D10.jpg "La respuesta forzada y la forma de la respuesta natural son: yF[n] = -2(0.4)n y yN[n] = K(0.6)n. Su ZSR se encuentra de la forma de la respuesta total yzs[n] = -2(0.4)n + K(0.6)n, con c.i.=0. yzs[-1] = 0 = -5+K/0.6 K=3 yzs[n] = -2(0.4)n + 3(0.6)n, n0. Su ZIR se encuentra de la respuesta natural yzi[-1]=10= K/0.6 K=6 yzi[n]=6(0.6)n , n0. La respuesta natural es y[n]= yzi[n] + yzs[n]= = -2(0.4)n + 9(0.6)n, n0.")
86
Respuesta al impulso

88
Estabilidad

91
Tarea C. Digital

93
Tarea C. Digital Avanzado

Presentaciones similares