Descargar la presentación
La descarga está en progreso. Por favor, espere

1
M. en C. Luis Adrián Lizama Pérez
Control Digital/Avanzado Estabilidad, Función de Transferencia, Transformadas M. en C. Luis Adrián Lizama Pérez

2
Respuesta al impulso La respuesta al impulso se denota por h(t) y constituye la respuesta de un sistema LTI relajado a un impulso unitario (t) Los métodos en el dominio del tiempo son tediosos, por lo que es más fácil si se acude al dominio transformado Impulso de entrada (t) Sistema LTI relajado Respuesta al impulso h(t)
 Sistema LTI relajado. Respuesta al impulso h(t)")
3
h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt
La respuesta al impulso h(t) es la derivada de la respuesta al escalón s(t): h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt Un impulso produce un cambio súbito de estado (condiciones iniciales) Resolver y’(t)+y(t)=(t), y(0)=0 es equivalente a y’’(t)+y(t)=0 , y(0)=1 t -
 es la derivada de la respuesta al escalón s(t): h(t)=s’(t)=ds(t)/dt s(t)= h(t)dt. Un impulso produce un cambio súbito de estado (condiciones iniciales) Resolver y’(t)+y(t)=(t), y(0)=0 es equivalente a y’’(t)+y(t)=0 , y(0)=1. t. -")
4
De manera similar un sistema de segundo orden y’’(t)+1y’(t)+2y’(t)=x(t), puede encontrarse mediante la ec. homogénea y’’(t)+1y’(t)+2y’(t)=0, c.i. y(0)=0, y’(0)=1 Ej: Sea y’(t) + 2y(t) = x(t), la ec. característica es s+2=0, raíz s=-2, la respuesta natural es h(t)=Ke-2t con h(0)=1, se obtiene h(0)=K=1, y h(t)=e-2tu(t) Ej: Sea y’’(t) + 3y’(t) + 2y(t) = x(t), la ec. característica es s2+3s+2=0, raíces s1=-1, s2=-2, la respuesta natural es h(t)=K1e-2t + K2e-2t, con h(0)=0, h’(0)=-K1-2K2=1, de donde K1=1 y K2=-1, entonces h(t)=(e-t - e-2t)u(t)
 + 2y(t) = x(t), la ec. característica es s+2=0, raíz s=-2, la respuesta natural es h(t)=Ke-2t. con h(0)=1, se obtiene h(0)=K=1, y h(t)=e-2tu(t) Ej: Sea y’’(t) + 3y’(t) + 2y(t) = x(t), la ec. característica es s2+3s+2=0, raíces s1=-1, s2=-2, la respuesta natural es h(t)=K1e-2t + K2e-2t, con h(0)=0, h’(0)=-K1-2K2=1, de donde K1=1 y K2=-1, entonces h(t)=(e-t - e-2t)u(t)")
5
Función de transferencia
La función de transferencia o ganancia del sistema se puede definir como el cociente de la salida en estado estable entre la entrada en estado estable: Función de transferencia = Salida Estable / Entrada Estable Ej: Al insertar una moneda en una máquina de chocolates se obtiene la de salida de una barra de chocolate. La FT es 1 barra/moneda. Si el sistema es LTI para dos monedas se obtienen dos chocolates

6
Hasta se ha considerado los valores en estado estable pero no los cambios transitorios en el tiempo
Ahora veremos el comportamiento de los sistemas en el tiempo, se decir el comportamiento dinámico de los sistemas

7
Suponga un sistema en el que la entrada x está relacionada con la salida y por la ecuación:
Si las condiciones iniciales son cero la ecuación queda: donde G(s) es la función de transferencia
 es la función de transferencia.")
8
Ej: Escriba la función de transferencia para los sistemas siguientes:
A) Un sistema masa-resorte-amortiguador con F como entrada y x como salida B) Un circuito resistor-capacitor con v como entrada y vc como salida
 Un sistema masa-resorte-amortiguador con F como entrada y x como salida. B) Un circuito resistor-capacitor con v como entrada y vc como salida.")
9
C) Un circuito resistor-capacitor-inductor con v como entrada y vc como salida
D) Un sistema eléctrico con v como entrada y vc como salida E) Un sistema hidraúlico con q como entrada y h como salida
 Un sistema eléctrico con v como entrada y vc como salida. E) Un sistema hidraúlico con q como entrada y h como salida.")
10
F) Los elementos en el sistema de un motor de cd controlado por armadura. Entrada (va-vb), salida i
Embobinado de armadura: entrada ia, salida T: Carga: entrada T, salida : Lazo de realimentación: G) Sistema hidráulico con carga:
 Sistema hidráulico con carga:")
11
Estabilidad En el dominio del tiempo, la estabilidad de entrada acotada, salida acotada (BIBO) implica que cada entrada acotada resulta en una salida acotada Las condiciones de estabilidad se pueden determinar de la ecuación característica: Cada raíz debe tener una parte real negativa y la derivada más alta de la entrada no debe exceder a la de la salida
 implica que cada entrada acotada resulta en una salida acotada. Las condiciones de estabilidad se pueden determinar de la ecuación característica: Cada raíz debe tener una parte real negativa y la derivada más alta de la entrada no debe exceder a la de la salida.")
12
Las raíces con partes reales negativas aseguran que la respuesta natural (y de entrada cero) siempre decae con el tiempo y la respuesta forzada (y de estado cero) siempre permanece acotada para una entrada acotada Las raíces con parte real igual a cero hacen al sistema inestable. Las raíces simples (no repetidas) con partes reales iguales a cero producen una respuesta natural constante (o senoidal) que es acotada, pero si la entrada es una constante o una senoide, la respuesta forzada es una rampa o senoide creciente
 con partes reales iguales a cero producen una respuesta natural constante (o senoidal) que es acotada, pero si la entrada es una constante o una senoide, la respuesta forzada es una rampa o senoide creciente.")
13
Las raíces repetidas con parte real igual a cero producen una respuesta que es un polinomio o senoide creciente Ej: El sistema y’’(t) +3y’(t)+2y(t)= x(t) es estable ya que las raíces de su ecuación característica s2+3s+2=0 son s=-1, -2 y tienen partes reales neg El sistema y’’(t) +3y’(t)= x(t) es inestable. Las raíces de su ec. Característica s2+3s=0 son s=0,-3 una de las raíces no tiene una parte real negativa. Aunque su respuesta natural es acotada, la entrada escalón produce una respuesta forzada de la forma Ctu(t) que no es acotada
 +3y’(t)+2y(t)= x(t) es estable ya que las raíces de su ecuación característica s2+3s+2=0 son s=-1, -2 y tienen partes reales neg. El sistema y’’(t) +3y’(t)= x(t) es inestable. Las raíces de su ec. Característica s2+3s=0 son s=0,-3 una de las raíces no tiene una parte real negativa. Aunque su respuesta natural es acotada, la entrada escalón produce una respuesta forzada de la forma Ctu(t) que no es acotada.")
14
El sistema y’’’(t) +3y’’(t) = x(t) es inestable
El sistema y’’’(t) +3y’’(t) = x(t) es inestable. Las raíces de su ecuación s3+3s2=0 son s1=0, s2=0 y s3=-3 que producen la respuesta natural yN(t)=Au(t) + Btu(t) + Ce-3tu(t) que es no acotada
 +3y’’(t) = x(t) es inestable. Las raíces de su ecuación s3+3s2=0 son s1=0, s2=0 y s3=-3 que producen la respuesta natural yN(t)=Au(t) + Btu(t) + Ce-3tu(t) que es no acotada.")
15
Basic Tool For Continuous Time: Laplace Transform
Convert time-domain functions and operations into frequency-domain f(t) ® F(s) Linear differential equations (LDE) ® algebraic expression in Complex plane Graphical solution for key LDE characteristics Discrete systems use the analogous z-transform Jlh: First red bullet needs to be fixed?
 ® F(s) Linear differential equations (LDE) ® algebraic expression in Complex plane. Graphical solution for key LDE characteristics. Discrete systems use the analogous z-transform. Jlh: First red bullet needs to be fixed")
16
Laplace Transforms of Common Functions
Name f(t) F(s) Impulse 1 Step Ramp Jlh: function for impulse needs to be fixed Exponential Sine
 F(s) Impulse. 1. Step. Ramp. Jlh: function for impulse needs to be fixed. Exponential. Sine.")
17
Laplace Transform Properties

18
Orden de un sistema El orden de un sistema es la máxima potencia de la derivada en la ecuación diferencial La máxima potencia de s en el denominador de la función de transferencia Primer orden: En el dominio de s: a1s Y(s) + a0 Y(s) = b0 X(s) G(s)= b0 / (a1s + a0)
 + a0 Y(s) = b0 X(s) G(s)= b0 / (a1s + a0)")
19
En el dominio de s: a1s Y(s) + a0 Y(s) = b0 X(s)
b0/a0 es la F.T. en estado estable G del sistema, a1/a0 es la constante de tiempo del sistema

20
Segundo orden: donde b0, a0, a1 y b0 son constantes. Con c.i.=0 se tiene en el dominio de s: a2s2Y(s) + a1s Y(s) + a0 Y(s) = b0 X(s) G(s)= b0 / (a2s2 + a1s + a0)
= b0 / (a2s2 + a1s + a0)")
21
La ecuación de segundo orden se puede escribir en términos de la frecuencia natural y del factor de amortiguamiento : es la frecuencia angular con la cual el sistema oscilará en ausencia de cualquier amortiguamiento y es el factor de amortiguamiento. En el dominio de s: s2Y(s) + 2 s Y(s) + 2Y(s) = b02 X(s)
 + 2 s Y(s) + 2Y(s) = b02 X(s)")
22
First Order System Impulse response Exponential Step response
Step, exponential Ramp response Ramp, step, exponential Jlh: Haven’t explained the relationship between poles and oscillations No oscillations (as seen by poles)
")
23
Respuesta al escalón 1 2 3 4 5 0.63G 0.86G 0.95G Tiempo y G
y= G(1-e-t/) para una entrada escalón unitario
 para una entrada escalón unitario.")
24
Respuesta a la rampa 1 2 3 4 5 0.63G 0.86G Tiempo y G
y= G[1- (1-e-t/)] para una entrada rampa unitaria
] para una entrada rampa unitaria.")
25
Respuesta al impulso 1 2 3 4 5 0.37G/ Tiempo y G
y= G ( 1/ ) e-t/ para una entrada impulso unitario 0.13G/ 0.05G/
 e-t/ para una entrada impulso unitario. 0.13G/ 0.05G/")
26
Respuesta a la rampa Tiempo y
Respuesta de un sistema de segundo orden a una entrada rampa unitaria y= bt, =0 y= bt - 2/ <1 =1

27
Respuesta al impulso t =0.1 y/b0 =0.5 =1 =2
Respuesta de un sistema de segundo orden a una entrada impulso =0.1 =0.5 =1 =2

28
Mp = Máximo sobrepaso ts tp tr td
Respuesta de un sistema de segundo orden a una entrada escalón

31
Sistemas Discretos

32
Respuesta al impulso Es la respuesta de un sistema a un impulso unitario [n] Proporciona un método para encontrar la respuesta de estado cero de sistemas LTI sobre cualquier entrada usando superposición La respuesta al impulso y la repuesta al escalón se usan para evaluar el funcionamiento de los sistemas digitales
![Respuesta al impulso Es la respuesta de un sistema a un impulso unitario [n]](http://slideplayer.es/slide/1661850/7/images/32/Respuesta+al+impulso+Es+la+respuesta+de+un+sistema+a+un+impulso+unitario+%EF%81%A4%5Bn%5D.jpg "Proporciona un método para encontrar la respuesta de estado cero de sistemas LTI sobre cualquier entrada usando superposición. La respuesta al impulso y la repuesta al escalón se usan para evaluar el funcionamiento de los sistemas digitales.")
33
h[n]: Salida de LTI relajado si x[n]=[n]
s[n]: Salida de LTI relajado si x[n]=u[n] Impulso de entrada [n] Sistema LTI relajado Respuesta al impulso h[n]
![h[n]: Salida de LTI relajado si x[n]=[n]](http://slideplayer.es/slide/1661850/7/images/33/h%5Bn%5D%3A+Salida+de+LTI+relajado+si+x%5Bn%5D%3D%EF%81%A4%5Bn%5D.jpg "s[n]: Salida de LTI relajado si x[n]=u[n] Impulso de entrada [n] Sistema LTI relajado. Respuesta al impulso h[n]")
34
Respuesta h[n] por recursión
Ej: Encuentre h[n] si y[n]-y[n-1]=x[n] Se encuentra h[n] como la solución a h[n]= h[n-1] + [n] sujeto a la condición y[-1]=0. Por recursión: h[0]= h[-1] + [0]=1 h[2]= h[1] = 2 h[1]= h[0] = h[3]= h[2] = 3 La forma general de h[n] se puede encontrar como h[n]= nu[n]
![Respuesta h[n] por recursión](http://slideplayer.es/slide/1661850/7/images/34/Respuesta+h%5Bn%5D+por+recursi%C3%B3n.jpg "Ej: Encuentre h[n] si y[n]-y[n-1]=x[n] Se encuentra h[n] como la solución a h[n]= h[n-1] + [n] sujeto a la condición y[-1]=0. Por recursión: h[0]= h[-1] + [0]=1 h[2]= h[1] = 2. h[1]= h[0] = h[3]= h[2] = 3. La forma general de h[n] se puede encontrar como h[n]= nu[n]")
35
Estabilidad La estabilidad de entrada acotada, salida acotada (BIBO) implica que a cada entrada acotada debe corresponder a una salida acotada Las condiciones de estabilidad se determinan por medio de las raíces de la ecuación característica: una condición es que cada raíz debe tener una magnitud menor que uno

36
Los filtros FIR son siempre estables
Las raíces con magnitudes igual a la unidad hacen al sistema inestable: Las raíces sencillas (no repetidas) con magnitud unitaria producen una respuesta natural constante o senoidal que es acotada, pero si la entrada es una constante o senoide a la misma frecuencia, la respuesta forzada es una rampa o senoide creciente (véase Tabla 5.2) Las raíces repetidas con magnitud unitaria producen una respuesta natural que es senoidal creciente o polinomial creciente Los filtros FIR son siempre estables
 con magnitud unitaria producen una respuesta natural constante o senoidal que es acotada, pero si la entrada es una constante o senoide a la misma frecuencia, la respuesta forzada es una rampa o senoide creciente (véase Tabla 5.2) Las raíces repetidas con magnitud unitaria producen una respuesta natural que es senoidal creciente o polinomial creciente. Los filtros FIR son siempre estables.")
37
|z|=1 Higher-frequency response Longer settling time Stable Unstable
Im(s) Higher-frequency response Longer settling time Re(s) Stable |z|=1 Unstable
 Higher-frequency. response. Longer settling time. Re(s) Stable. |z|=1. Unstable.")
39
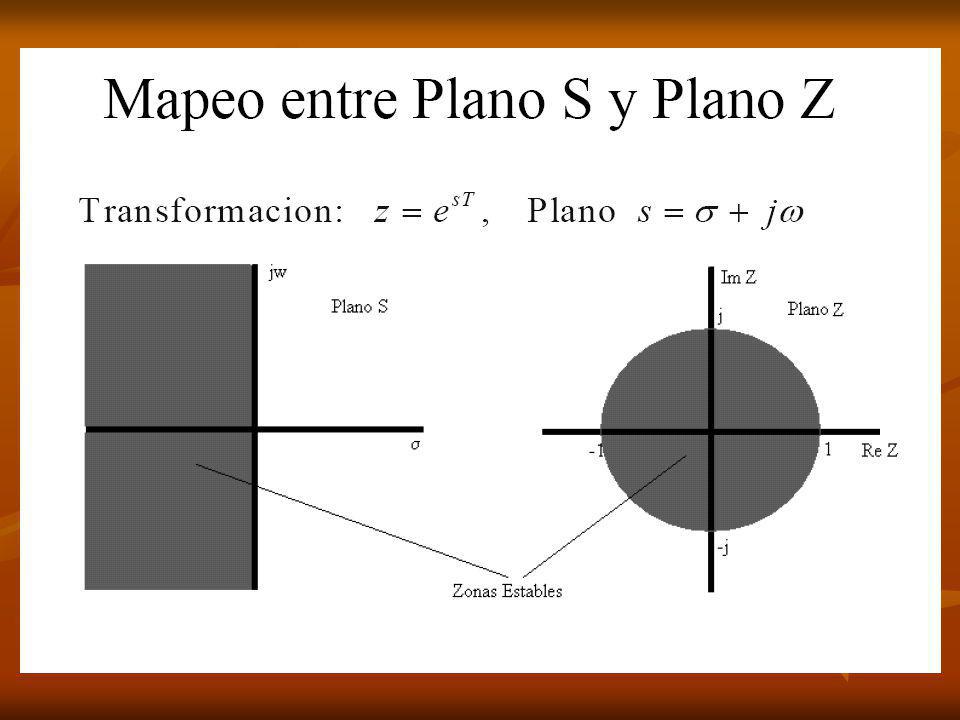
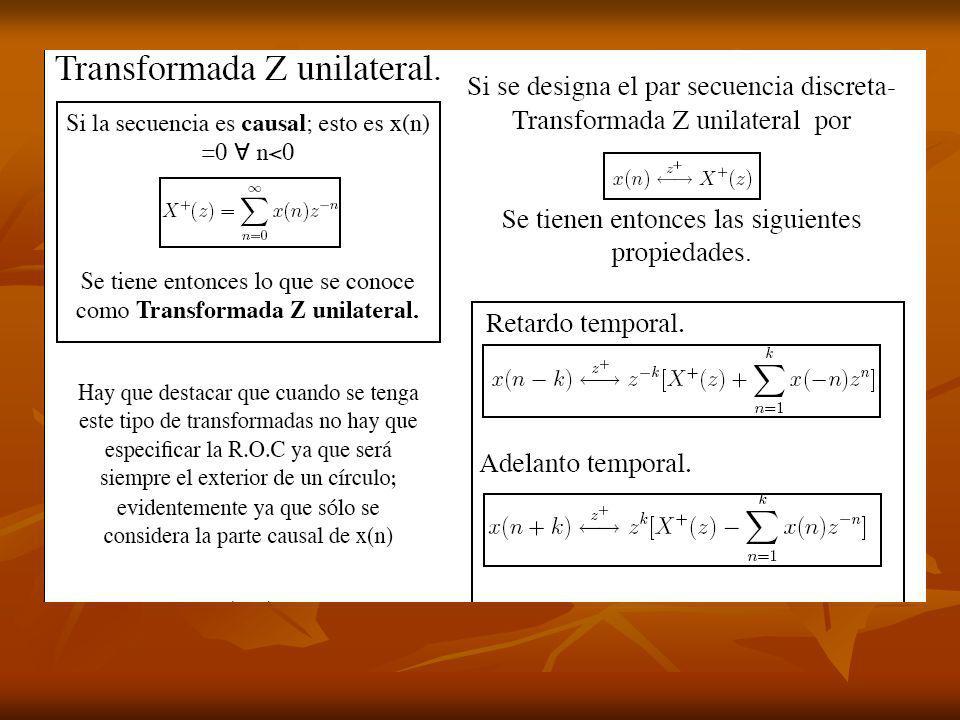
Transformada Z

40
Example 1: Consider the time function

41
Another example … Example 2: Now consider the time function Let Then,

42
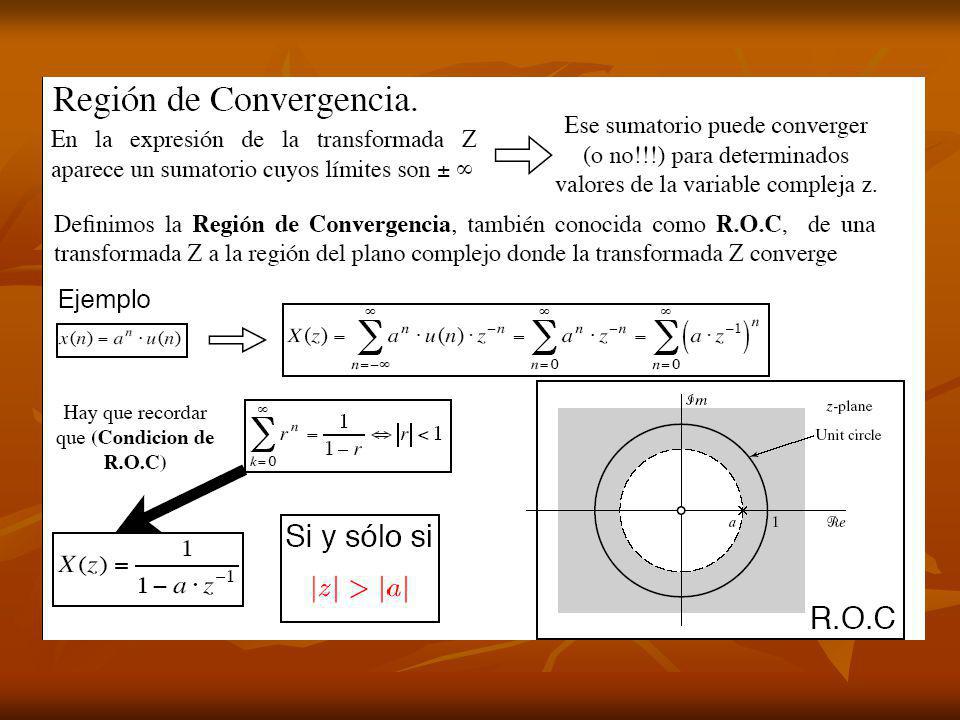
The importance of the region of convergence
Did you notice that the Z-transforms were identical for Examples 1 and 2 even though the time functions were different? Yes, indeed, very different time functions can have the same Z-transform! What’s missing in this characterization? The region of convergence (ROC). In Example 1, the sum converges only for In Example 2, the sum converges only for So in general, we must specify not only the Z-transform corresponding to a time function, but its ROC as well.
. In Example 1, the sum converges only for. In Example 2, the sum converges only for. So in general, we must specify not only the Z-transform corresponding to a time function, but its ROC as well.")
43
What shapes are ROCs for Z-transforms?
In Example 1, the ROC was We can represent this graphically as:

44
What shapes are ROCs for Z-transforms?
In Example 2, the ROC was We can represent this graphically as: (ROC is shaded area)
")
47
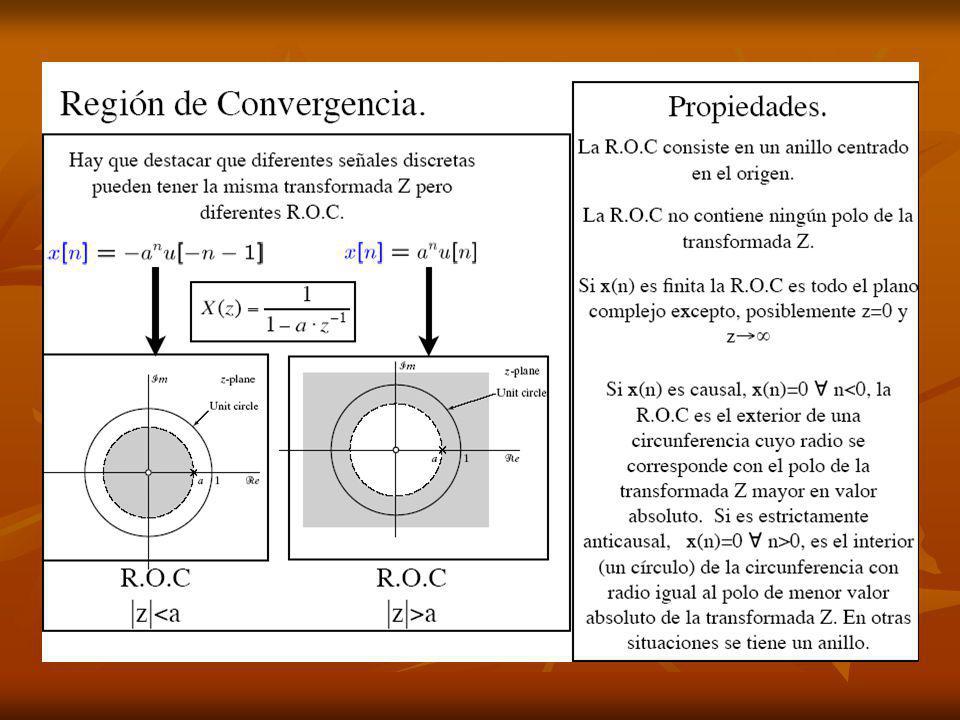
Propiedades de la Transformada Z

48
Transformadas Z

49
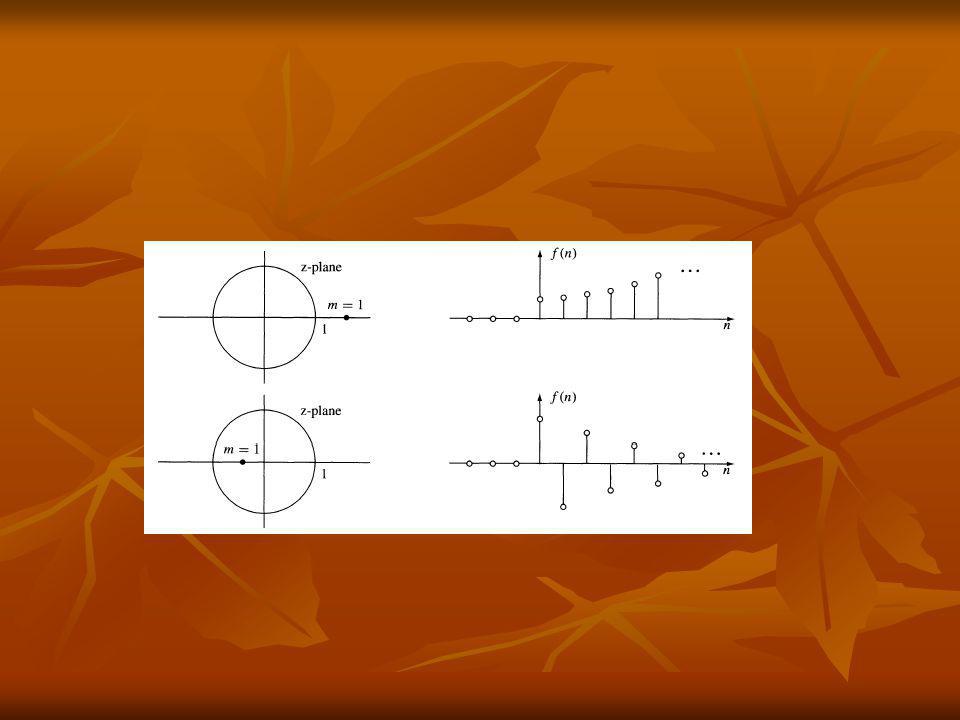
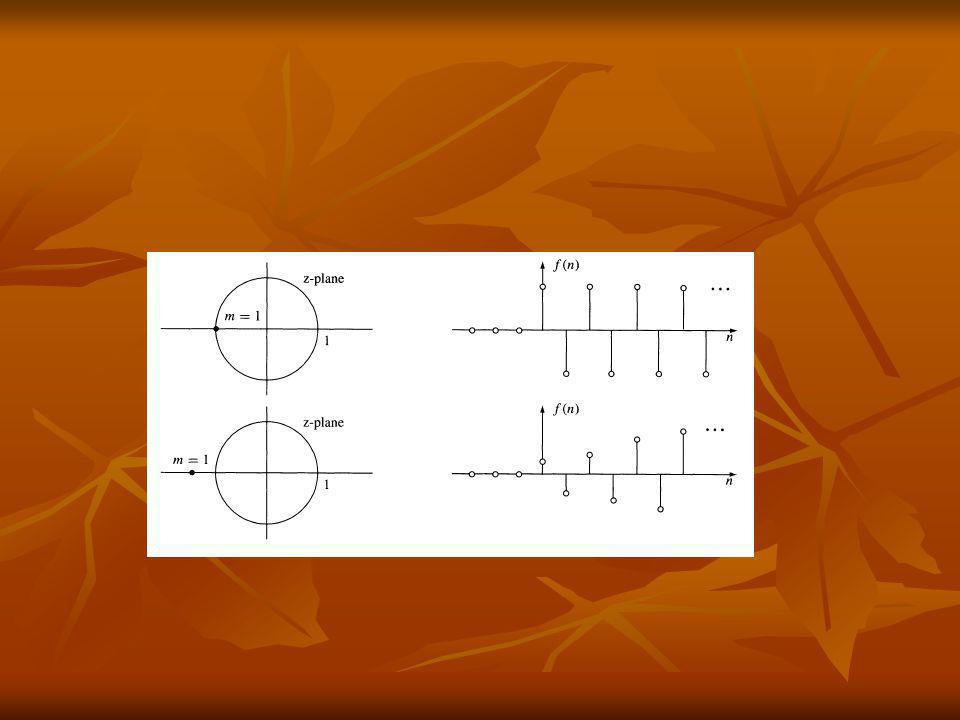
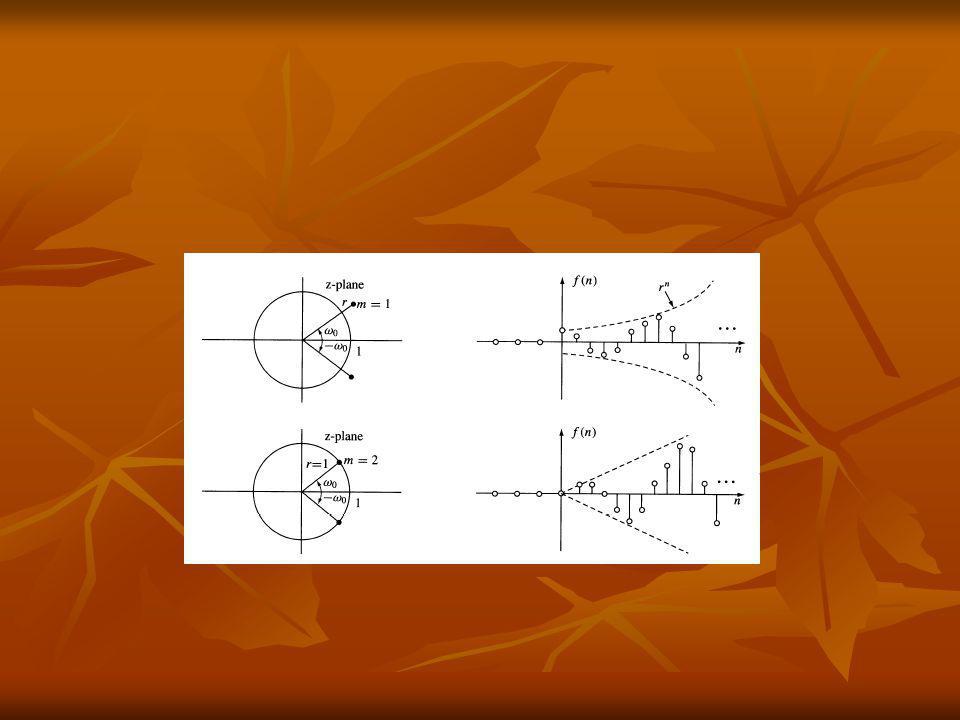
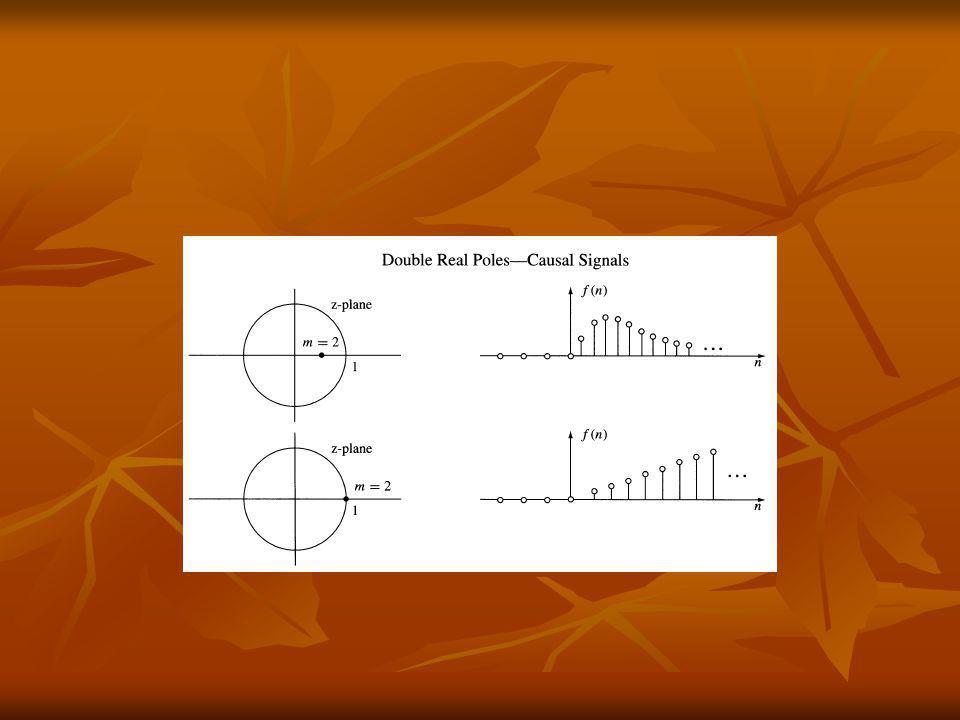
Polos de Transformada Z

57
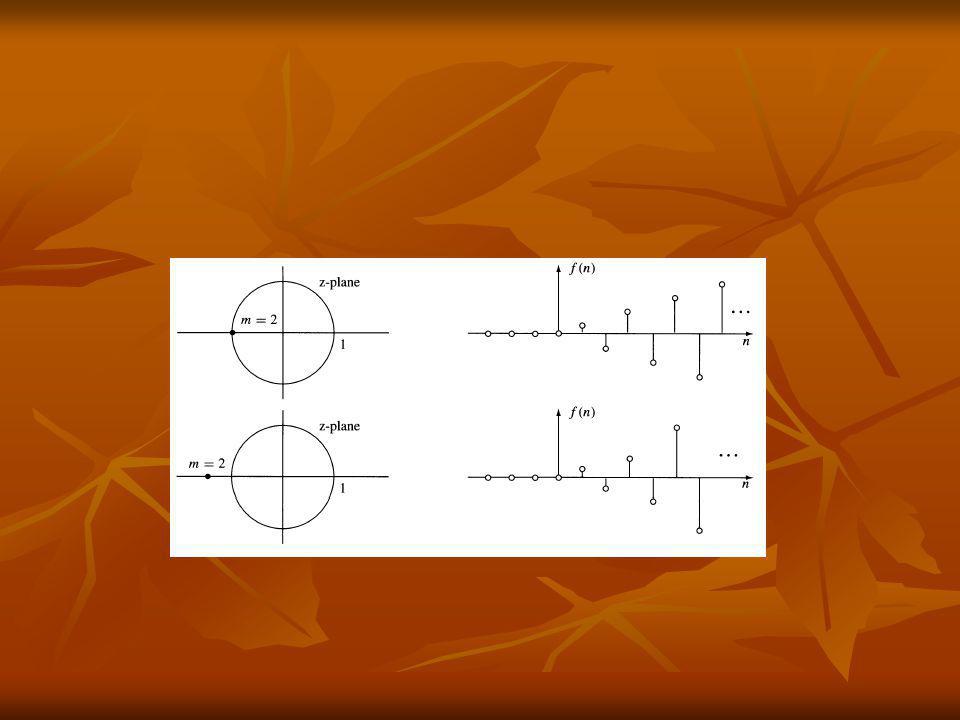
Ej: El sistema y[n] – (1/6)y[n-2] = x[n] es estable ya que las raíces de la ec. característica z2-(1/6)z-1/6=0 son z1=1/2 y z2= -1/3 y sus magnitudes son menores a 1 Ej: El sistema y[n] – y[n-1] = x[n] es inestable. La raíz de su ec. característica es z=1 y resulta la respuesta natural yN=Ku[n] que es acotada, pero si x[n]=u[n], la respuesta forzada es Cnu[n] que es no acotada
![Ej: El sistema y[n] – (1/6)y[n-2] = x[n] es estable ya que las raíces de la ec. característica z2-(1/6)z-1/6=0 son z1=1/2 y z2= -1/3 y sus magnitudes son menores a 1](http://slideplayer.es/slide/1661850/7/images/57/Ej%3A+El+sistema+y%5Bn%5D+%E2%80%93+%281%2F6%29y%5Bn-2%5D+%3D+x%5Bn%5D+es+estable+ya+que+las+ra%C3%ADces+de+la+ec.+caracter%C3%ADstica+z2-%281%2F6%29z-1%2F6%3D0+son+z1%3D1%2F2+y+z2%3D+-1%2F3+y+sus+magnitudes+son+menores+a+1.jpg "Ej: El sistema y[n] – y[n-1] = x[n] es inestable. La raíz de su ec. característica es z=1 y resulta la respuesta natural yN=Ku[n] que es acotada, pero si x[n]=u[n], la respuesta forzada es Cnu[n] que es no acotada.")
58
El sistema y[n] – 2y[n-1] + y[n-2]= x[n] es inestable
El sistema y[n] – 2y[n-1] + y[n-2]= x[n] es inestable. Las raíces de z2-2z+1=0 son iguales y producen la respuesta natural no acotada yN[n]=Au[n] + Bnu[n] Ej: El sistema y[n] – (1/2)y[n-1] = nx[n] es lineal, variante e inestable. La entrada en escalón (acotada) x[n]=u[n] produce una respuesta que incluye a la rampa un[n] que es no acotada Ej: El sistema y[n]=x[n] – 2x[n-1] es estable porque describe un filtro FIR
![El sistema y[n] – 2y[n-1] + y[n-2]= x[n] es inestable](http://slideplayer.es/slide/1661850/7/images/58/El+sistema+y%5Bn%5D+%E2%80%93+2y%5Bn-1%5D+%2B+y%5Bn-2%5D%3D+x%5Bn%5D+es+inestable.jpg "El sistema y[n] – 2y[n-1] + y[n-2]= x[n] es inestable. Las raíces de z2-2z+1=0 son iguales y producen la respuesta natural no acotada yN[n]=Au[n] + Bnu[n] Ej: El sistema y[n] – (1/2)y[n-1] = nx[n] es lineal, variante e inestable. La entrada en escalón (acotada) x[n]=u[n] produce una respuesta que incluye a la rampa un[n] que es no acotada. Ej: El sistema y[n]=x[n] – 2x[n-1] es estable porque describe un filtro FIR.")
60
Tarea C. Digital Evalúe la respuesta natural, forzada, de estado cero, de entrada cero y total. Suponga y’(0)=1 y las otras condiciones iniciales iguales a cero y’’(t) + 5y’(t) + 6y(t) = 2e-tu(t) y(0)= y’(0)=1 y’’(t) + 4y’(t) + 3y(t) = 36t u(t) y(0)= y’(0)=1
=1 y las otras condiciones iniciales iguales a cero. y’’(t) + 5y’(t) + 6y(t) = 2e-tu(t) y(0)=0 y’(0)=1. y’’(t) + 4y’(t) + 3y(t) = 36t u(t) y(0)=0 y’(0)=1.")
61
Obtenga la Transformada de Laplace de las siguientes funciones:
Un escalón de voltaje de magnitud 6V que empieza en t=3s 5e-2t 5(1-e-2t) Obtenga por medio de fracciones parciales la Transformada de Laplace inversa de: ( 6s+8 ) / [ s(s+1)(s+2) ]
 Obtenga por medio de fracciones parciales la Transformada de Laplace inversa de: ( 6s+8 ) / [ s(s+1)(s+2) ]")
62
Utilice Matlab para encontrar los polos y ceros de la función de transferencia: (5s2+3s+4)/(s3+2s2+4s+7) Utilice Matlab para obtener la respuesta a una entrada escalón para un sistema con una función de transferencia: 5/(s2+3s+12) Utilice Matlab para obtener la gráfica del lugar geométrico de las raíces para G(s)=(s+1)/(s2+4s+3)
 Utilice Matlab para obtener la gráfica del lugar geométrico de las raíces para G(s)=(s+1)/(s2+4s+3)")
63
Comandos de referencia de Matlab:
>> num=[] >> den = [] >> [z,p,k]=tf2zp(num, den) >> step(num, den) >> rlocus(num, den)
 >> step(num, den) >> rlocus(num, den)")
64
Tarea C. Digital Avanzado
Para el sistema {1 – z-1 – 2z-2}y[n]=x[n] establezca su ecuación de diferencias y calcule la respuesta total Encuentre la respuesta al impulso h[n] por recursión hasta n=4 para los sistemas y[n] – y[n-1] = 2x[n] y[n] – 3y[n-1] + 6y[n-2] = x[n-1]

65
Investigue la causalidad y estabilidad de los sistemas:
y[n] – 2y[n-1] = x[n] y[n] + y[n-1] + 0.5y[n-2] = x[n] y[n] = x[n] + x[n-1] + x[n-2]

66
Encontrar la T.Z. de la secuencia 0,1,2,3…
Determinar la función de transferencia para un sistema que tiene la ecuación en diferencias y[n+2] – 5y[n+1] + 6[n] = x[n] Encontrar la transformada z inversa para las siguientes funciones: F(z)=z/[(z-1)(z-2)(z-3)]
=z/[(z-1)(z-2)(z-3)]")
67
Utilice Matlab para simular la salida del siguiente sistema a una entrada escalón y una entrada senoidal

Presentaciones similares