Descargar la presentación
La descarga está en progreso. Por favor, espere

1
UNIVERSIDAD NACIONAL DE TRUJILLO DEPARTAMENTO ACADÉMICO DE FÍSICA
CURSO: BIOFÍSICA MÉDICA BIOMECÁNICA Prof. Dr. Elvar Quezada Castillo

2
MOVIMIENTO Y LEYES DE NEWTON

3
MOVIMIENTO Cambio de posición de un cuerpo con respecto a otro que se supone fijo. Clases de movimiento: 1. Movimiento rectilíneo 2. Movimiento circular 3. Movimiento parabólico 4. Movimiento pendular Velocidad Aceleración Aceleración de la gravedad “g”.

4
LEYES DE NEWTON Primera ley o ley de inercia: Todo cuerpo continúa en estado de reposo o de movimiento rectilíneo con velocidad constante, a menos que sobre él actúen fuerzas que modifiquen dicho estado. Segunda ley o ley de la fuerza: Un objeto sobre el que actúa una fuerza F tiene una aceleración a en dirección de F. F = m a Tercera ley o ley de acción y reacción: Cuando un cuerpo ejerce una fuerza sobre otro, éste responde con una fuerza de igual magnitud y sentido contrario sobre el primero. FA = -FR

5
CLASES DE FUERZAS Fuerza de la gravedad, es la fuerza con que la tierra atrae a todos los objetos. W = mg Fuerzas paralelas Fuerzas concurrentes

6
CLASES DE FUERZAS Fuerza no concurrentes Fuerza elástica F = k x
Fuerza de rozamiento f = µN f N W T

7
CLASES DE FUERZAS Fuerza de rozamiento de una cuerda sobre una superficie curva Fuerzas normales Fuerzas de cizallamiento Fuerzas de tensión y compresión

8
Fuerza G = ma = m(ng) = n(mg) =nG,
CLASES DE FUERZAS Fuerza “G”, es generada por aceleraciones o desaceleraciones súbitas y se expresan en múltiplos de G. Esto es: Fuerza G = ma = m(ng) = n(mg) =nG, donde G = mg Fuerza centrípeta y centrífuga
 = n(mg) =nG, donde G = mg. Fuerza centrípeta. y centrífuga.")
9
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 1. Desplazamiento vertical
A) ACELERACIÓN HACIA ARRIBA Wef = m(a+g) Aumenta el peso del sujeto y en consecuencia el peso específico de los fluidos corporales.
 ACELERACIÓN HACIA. ARRIBA. Wef = m(a+g) Aumenta el peso del sujeto y en consecuencia el peso específico de los fluidos corporales.")
10
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 1. Desplazamiento vertical
A) ACELERACIÓN HACIA ARRIBA 1. La sangre se colapsa en la parte inferior del cuerpo y la presión arterial aumenta Pi = Po + γ(1 + a/g)hi Ps = Po – γ(1 + a/g)hs 2. Disminuye el gasto cardiaco
 ACELERACIÓN HACIA ARRIBA. 1. La sangre se colapsa en la parte inferior del cuerpo y la presión arterial aumenta. Pi = Po + γ(1 + a/g)hi. Ps = Po – γ(1 + a/g)hs. 2. Disminuye el gasto cardiaco.")
11
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 1. Desplazamiento vertical
A) ACELERACIÓN HACIA ARRIBA Las aceleraciones hasta 4g son tolerables en períodos que no superen los 15 minutos sin molestias apreciables. Entre 4g y 6g se notan dificultades respiratorias y al cabo de un minuto el ritmo del corazón y respiración aumentan. A 8g la respiración se hace más fatigosa y aparecen dolores en el tórax. Aparecen también hemorragias cutáneas. A 10g la respiración se hace imposible y la tolerancia queda limitada a pocos segundos. Se distienden las estructuras del cuerpo especialmente el corazón que está lleno de sangre. A 12g y valores superiores la pérdida de conciencia es inmediata y aparecen hemorragias internas. A 20g se produce fractura vertebral.
 ACELERACIÓN HACIA ARRIBA. Las aceleraciones hasta 4g son tolerables en períodos que no superen los 15 minutos sin molestias apreciables. Entre 4g y 6g se notan dificultades respiratorias y al cabo de un minuto el ritmo del corazón y respiración aumentan. A 8g la respiración se hace más fatigosa y aparecen dolores en el tórax. Aparecen también hemorragias cutáneas. A 10g la respiración se hace imposible y la tolerancia queda limitada a pocos segundos. Se distienden las estructuras del cuerpo especialmente el corazón que está lleno de sangre. A 12g y valores superiores la pérdida de conciencia es inmediata y aparecen hemorragias internas. A 20g se produce fractura vertebral.")
12
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 1. Desplazamiento vertical
B) ACELERACIÓN HACIA ABAJO Pi = Po + γ(1 - a/g)hi Ps = Po – γ(1 - a/g)hs Sobreviene sensación de desconcierto síquica y fisiológica. Al perder peso la sangre o quedarse sin peso el esfuerzo que hace el corazón es inferior al normal, y su ritmo se hace más lento. El esqueleto deja de ser el sostén necesario del cuerpo humano y puede ocurrir descalsificación.
 ACELERACIÓN HACIA ABAJO. Pi = Po + γ(1 - a/g)hi. Ps = Po – γ(1 - a/g)hs. Sobreviene sensación de desconcierto síquica y fisiológica. Al perder peso la sangre o quedarse sin peso el esfuerzo que hace el corazón es inferior al normal, y su ritmo se hace más lento. El esqueleto deja de ser el sostén necesario del cuerpo humano y puede ocurrir descalsificación.")
13
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 2
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 2. Desplazamiento horizontal en línea recta A velocidad constante no se producen efectos fisiológicos. Al principio del viaje hay una aceleración lineal y el piloto sufre la acción de una fuerza Al final del viaje habrá una fuerza impulsora hacia delante que sacaría al piloto del asiento. Los efectos fisiológicos no son violentos porque la aceleración es perpendicular al flujo sanguíneo.

14
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 3. Desplazamiento circular
A) En plano horizontal La fuerza efectiva presiona al experimentador contra la pared de la jaula. La inclinación del avión indica la forma oblicua que adopta el aparato para alinear su eje vertical con la dirección tomada por el peso
 En plano horizontal. La fuerza efectiva presiona al experimentador contra la pared de la jaula. La inclinación del avión indica la forma oblicua que adopta el aparato para alinear su eje vertical con la dirección tomada por el peso.")
15
EFECTOS FISIOLÓGICOS DE LA ACELERACIÓN 3. Desplazamiento circular
B) En un plano vertical Cuando sale del picado experimenta una fuerza G positiva, la presión sanguínea aumenta en la parte inferior del cuerpo, disminuye el retorno venoso y el gasto cardiaco. Disminuye la presión de la sangre en la cabeza y no se irriga completamente el cerebro. Cuando entra al picado experimenta una fuerza G negativa, aumenta la presión de la sangre en el cerebro, el corazón late lentamente y puede dejar de hacerlo durante 5 a 10 segundos. Se distienden los tejidos elásticos como el corazón lleno se sangre. La aceleración transversal provoca desplazamiento del corazón de unos 25 mm.
 En un plano vertical. Cuando sale del picado experimenta una fuerza G positiva, la presión sanguínea aumenta en la parte inferior del cuerpo, disminuye el retorno venoso y el gasto cardiaco. Disminuye la presión de la sangre en la cabeza y no se irriga completamente el cerebro. Cuando entra al picado experimenta una fuerza G negativa, aumenta la presión de la sangre en el cerebro, el corazón late lentamente y puede dejar de hacerlo durante 5 a 10 segundos. Se distienden los tejidos elásticos como el corazón lleno se sangre. La aceleración transversal provoca desplazamiento del corazón de unos 25 mm.")
16
BIOMECÁNICA DEL ESQUELETO

17
EL ESQUELETO El esqueleto esta formado por órganos denominados huesos que cumplen funciones: 1.Sostén de diversas partes del organismo 2. Modela el cuerpo 3.Forma palancas, que al completarse con articulaciones y músculos son los responsables de los movimientos del cuerpo 4.Conforma cavidades limitadas por varios huesos, en las cuales se alojan órganos importantes o delicados.

18
BIOMECÁNICA DEL ESQUELETO
Los huesos son los órganos pasivos del movimiento y articulados entre sí constituyen verdaderas palancas, donde los órganos de acción son los músculos. El estudio de estas palancas óseas constituye la biomecánica del esqueleto. El cuerpo humano puede considerarse constituido por cadenas óseas en las que cada eslabón es un cuerpo esencialmente rígido.

19
CADENAS ÓSEAS Dempster (1955) representó al esqueleto humano como un sistema de cadenas óseas sobre las cuales actúan fuerza de tensión y compresión.
 representó al esqueleto humano como un sistema de cadenas óseas sobre las cuales actúan fuerza de tensión y compresión.")
20
ARTICULACIONES Es la conjunción entre dos huesos formados por una serie de estructuras mediante las cuales se unen dos huesos entre sí. Existen tres tipos: sinartrósis (inmóviles), anfiartrósis (semi móviles) y diartrósis (móviles). Las diartrósis tienen dos superficies lisas separadas por una cavidad articular que produce un líquido lubricante (sinovial).
, anfiartrósis (semi móviles) y diartrósis (móviles). Las diartrósis tienen dos superficies lisas separadas por una cavidad articular que produce un líquido lubricante (sinovial).")
21
MOVIMIENTO DE LAS ARTICULACIONES
Flexión Extensión

22
MOVIMIENTO DE LAS ARTICULACIONES
Abducción Aducción Circunducción

23
CONO DE CIRCUNDUCCIÓN Cono de circunducción generado por la extremidad inferior al moverse respecto al centro de la cadera que actúa como vértice de dicho cono.

24
MOVIMIENTO DE LAS ARTICULACIONES
Supinación Pronación

25
CENTRO DE MOVIMIENTO

26
MÚSCULOS F´> Fp Son de tres clases: Esqueléticos, cardiaco y lisos
Son materiales viscoelásticos. La fuerza muscular depende de los siguientes factores: 1. Número de fibras musculares (n) 2. Fuerza de cada fibra (f) 3. Disposición geométrica de las fibras dentro del músculo 4. Forma y tamaño del músculo 5. Modalidad de la contracción F = nf F´> Fp
 2. Fuerza de cada fibra (f) 3. Disposición geométrica de las fibras dentro del músculo. 4. Forma y tamaño del músculo. 5. Modalidad de la contracción. F = nf. F´> Fp.")
27
MOMENTO DE UNA FUERZA M = r x F M = rF sen θ Mm = -(W)(a) = - Wa
Mc = -(W)(a + b) = - W(a + b) Mh = - (W)(a + b + c) = - W(a + b + c)
(a + b) = - W(a + b) Mh = - (W)(a + b + c) = - W(a + b + c)")
28
MOMENTO DE UNA FUERZA Mm = - W a sen θ Mc = - W (a + b) sen θ
Mh = - W (a + b + c) sen θ
 sen θ.")
29
MOMENTO DE UNA FUERZA Mf = rf W cos θ Me = re W cos θ

30
MOMENTO DE UNA FUERZA Mc = rcF Ms = rsF ¿Cuás es mayor?

31
PAR DE FUERZAS Se determina multiplicando la intensidad de la fuerza por el brazo del par M = Fd Rota el cuerpo sobre si mismo

32
PAR DE FUERZAS Contracción del bíceps. Rotación de la cabeza.
Movimiento bascular del omóplato. Las fuerzas de gravedad producen pares de fuerzas.

33
PAR DE FUERZAS Vista superior de par de fuerzas de fibras de músculo temporal (F1) y músculo pterigoideo (F2). Vista interna de par de fuerzas de músculo pterigoideo externo (F1) y de músculo digástrico (F2).
 y de músculo digástrico (F2).")
34
POLEAS Polea es una rueda acanalada en la periferia (para que se mantenga adaptada una cuerda) que puede girar libremente alrededor de un eje perpendicular a la rueda pasando por su centro a) P = R (polea fija) b) P = ½ R (polea móvil)
 que puede girar libremente alrededor de un eje perpendicular a la rueda pasando por su centro. a) P = R (polea fija) b) P = ½ R (polea móvil)")
35
POLEAS ÓSEAS Existen estructuras óseas que colocan al músculo en una situación análoga a la de una polea, de ahí el nombre de poleas óseas que se les da a estas estructuras. El maléolo interno del pie La rótula El músculo deltoides

36
SISTEMAS DE TRACCIÓN

37
CENTRO DE GRAVEDAD DEL CUERPO HUMANO
Cabeza.- En la línea media que une los puntos de adhesión de ambas orejas. Tronco+cabeza.- En el plano que pasa por el apéndice xifoides y la undécima vértebra dorsal. Brazo, muslo, pierna y pie.- A los 5/9 de la longitud del segmento, medido a partir de la extremidad distal. Mano, antebrazo.-A 1/3 de la longitud del segmento medido a partir del codo. Miembro superior.- En el codo. Miembro inferior.- Un poco por encima de la rodilla.

38
CENTRO DE GRAVEDAD DEL CUERPO HUMANO
No es un punto fijo, depende de la posición relativa de los distintos segmentos, de la topografía adiposa del sujeto y del índice esquelético. En un sujeto normal en posición de pie con los brazos colgando paralelamente al tronco, el C.G. se encuentra en la línea media del cuerpo, a unos 4 cm por encima de las articulaciones coxofemorales y a un centímetro detrás de la línea que los une.

39
Momento de potencia = momento de resistencia
PALANCA Palanca es una barra rígida que puede girar alrededor de un punto o eje fijo. Momento de potencia = momento de resistencia Pa = Rb

40
PALANCAS ÓSEAS Palancas de primer género: Articulación de la cabeza con el tronco, huesillos del oído, articulación coxofemoral cuando una persona está parada en un solo pie, quinta vértebra lumbar cuando una persona está en posición erguida. Palancas de segundo género: El pié al empinarnos, flexión del tronco al inclinarnos, mandíbula inferior durante la masticación con molares. Palancas de tercer género: Extensión de la pierna, flexión del brazo, abducción del brazo, mandíbula inferior durante la masticación con los incisivos.

41
EFECTOS DEL MÚSCULO SOBRE LAS PALANCAS ÓSEAS
1. Efecto estático P = (b/a)R = kR 2. Efecto dinámico concéntrico P > kR 3. Efecto dinámico excéntrico P < kR
R = kR. 2. Efecto dinámico concéntrico. P > kR. 3. Efecto dinámico excéntrico. P < kR.")
42
EQUILIBRIO DE FUERZAS Primera condición: Segunda condición:

43
MECÁNICA DEL PIE El pié es un órgano de soporte.
El tobillo actúa como gozne o pivote en la flexión y extensión del pie. La parte superior del astrágalo se mueve en la cavidad formada por la tibia y el peroné. Los gemelos y el soleo son motores principales durante el empinamiento.

44
El problema mecánico consiste en determinar:
1. La tensión ejercida hacia arriba por los músculos de la pierna. 2. La fuerza de contacto Fc hacia abajo producida en la articulación del tobillo. Para esto es necesario conocer la geometría del pie

45
MECÁNICA DEL CUADRÍCEPS
Es tres veces más poderoso que el conjunto de músculos flexores de la pierna. No interviene en el mecanismo de equilibrio en la estación de pie. Se contrae con gran energía durante la carrera y la marcha. En la extensión de la pierna el cuadriceps tira de la rótula hacia arriba sobre la articulación de la rodilla en forma similar a una polea.

46
El problema mecánico consiste en determinar:
1. La tensión del cuadríceps. 2. La fuerza de contacto Fc ejercida por el fémur. Para esto es necesario conocer la geometría del segmento. θ θ

47
MECÁNICA DEL BÍCEPS Es el músculo principal en la flexión del brazo.
El codo es el punto de giro, el antebrazo y la mano son los órganos de compresión y el bíceps el órgano de tensión.

48
El problema mecánico consiste en determinar:
1. La fuerza del bíceps ejercida hacia arriba a lo largo del eje del músculo. 2. La fuerza de contacto Fc hacia abajo ejercida por el húmero sobre el codo. Para esto es necesario conocer la geometría del brazo.

49
MECÁNICA DEL DELTOIDES
El deltoides es un músculo grande y resistente que abraza la articulación escapulohumeral. Se origina en la parte anterior de la clavícula, en su tercio superior y se inserta en la tuberosidad deltoidea del húmero. Es el órgano activo en la abducción del brazo y forma un ángulo de 15º con el eje del húmero.

50
El problema mecánico consiste en determinar:
1. La fuerza del deltoides. 2. La fuerza de contacto Fc producida en la articulación del hombro. Para esto es necesario conocer la geometría del segmento.

51
MECÁNICA DE LA MANDÍBULA INFERIOR
La mandíbula es un hueso grande en forma de herradura que forma el tercio inferior del esqueleto facial. Se articula a un par de cóndilos uno a cada lado del cráneo y actúan como goznes. El masetero es el músculo principal de la masticación y uno de los más poderosos del cuerpo. La mandíbula actúa como una palanca de tercer género durante la masticación con los dientes o en la succión y el llanto.

52
El problema mecánico consiste el determinar:
1. La fuerza hacia arriba debido a la acción de los maseteros. 2. La fuerza de contacto Fc hacia abajo ejercida por los cóndilos. Para esto es necesario conocer la geometría de la mandíbula.

53
MECÁNICA DE LA COLUMNA VERTEBRAL
La quinta vértebra lumbar (VL) actúa como punto de apoyo rígido en las flexiones de cintura. Los músculos de la espalda se insertan a los 2/3 de la columna vertebral medida a partir del punto de apoyo. El centro de gravedad del tronco se encuentra aproximadamente a ½ de la columna vertebral medido a partir de la VL. Los músculos espinales forman un ángulo de 12º con el eje de la columna vertebral.
 actúa como punto de apoyo rígido en las flexiones de cintura. Los músculos de la espalda se insertan a los 2/3 de la columna vertebral medida a partir del punto de apoyo. El centro de gravedad del tronco se encuentra aproximadamente a ½ de la columna vertebral medido a partir de la VL. Los músculos espinales forman un ángulo de 12º con el eje de la columna vertebral.")
54
El problema mecánico consiste en determinar:
1.La fuerza de los músculos espinales T. 2.La fuerza de contacto Fc producida sobre la VL. Para esto es necesario conocer la geometría de la columna vertebral.

55
MECÁNICA DE LA CBTP El CBTP es el sistema formado por la cabeza, brazos, tronco y pierna izquierda (o derecha). Sobre el CBTP actúan el peso W, la tensión T ejercida por los músculos abductores y la fuerza de contacto Fc ejercida por el fémur sobre la cadera. El C.G. no está sobre la línea media del cuerpo. Fc T T R W

56
El problema mecánico de la CBTP consiste en determinar:
1. La tensión de los músculos abductores. 2. La fuerza de contacto Fc en la articulación coxofemoral. Para esto es necesario conocer la geometría del sistema

57
BIOMECÁNICA DE LA ATM (2) (1) Eje horizontal 2. Eje sagital (3)
3. Eje frontal (3)
")
58
(a) Movimiento de traslación de la mandíbula
(b) Presiones en las articulaciones
 Presiones en las articulaciones.")
59
Diagrama de fuerzas y ángulos para determinar las fuerzas actuantes sobre la mandíbula

60
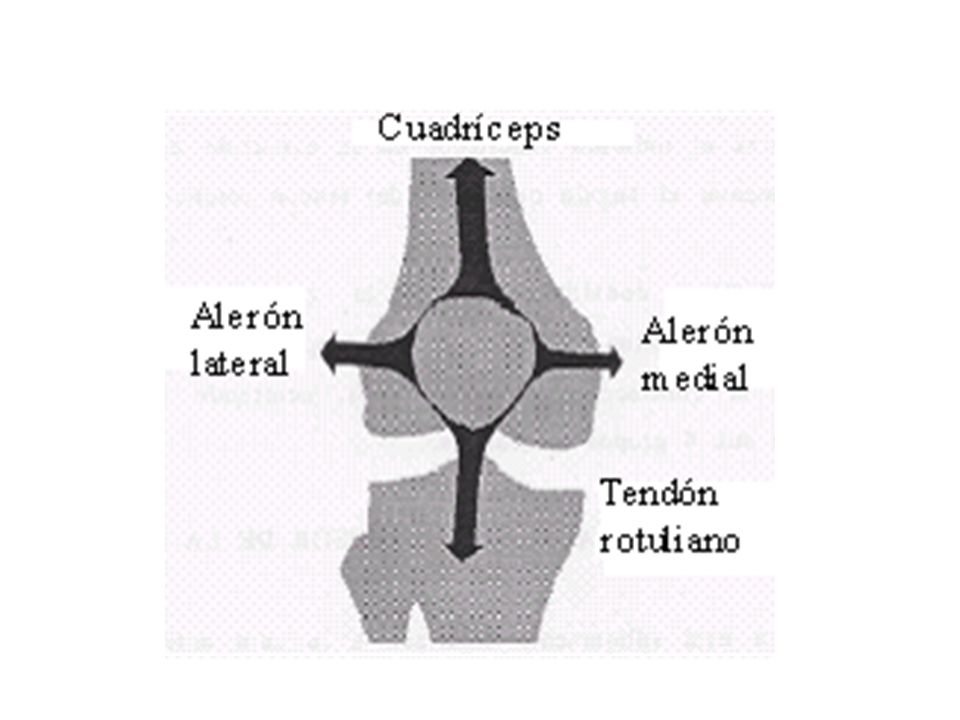
ARTICULACIÓN FEMOROPATELAR
Está situada en la parte anterior de los conductos femorales y su papel es fundamental en la flexión y extensión de la rodilla, por las siguientes razones: refuerza el músculo cuadríceps en la extensión activa de la rodilla, al aumentar el ángulo de ataque del tendón rotuliano sobre la tibia. Disminuye considerablemente la fricción del tendón del cuadríceps, facilitando el deslizamiento del aparato extensor. Guía la contracción del cuadríceps, centrando las fuerzas divergentes de sus 4 grupos musculares.

63
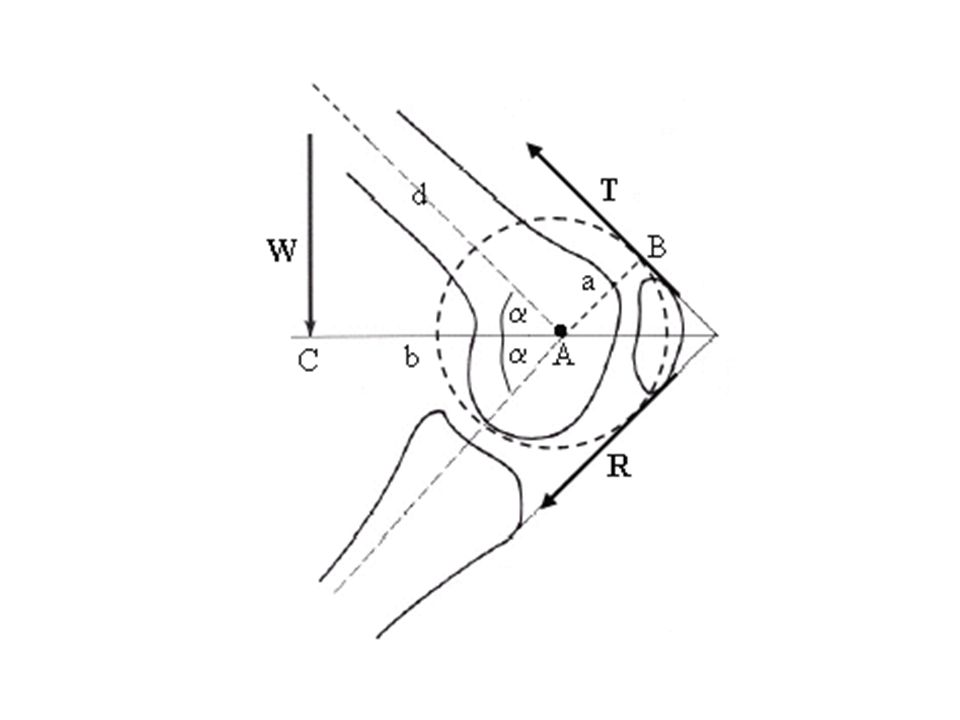
El problema mecánico de la articulación fémoropatelar consiste en determinar:
la fuerza del cuadríceps que sirve para mantener el equilibrio de la articulación, la fuerza de reflexión o presión fémoropatelar. Para esto debe conocerse la geometría de la articulación.

64
GRACIAS POR SU ATENCIÓN

Presentaciones similares