Descargar la presentación
La descarga está en progreso. Por favor, espere

1
TEMA 2: ESTRUCTURA Y FUNCIONES DEL SISTEMA BIOMECÁNICO DEL APARATO LOCOMOTOR
Mtra. Lorenia López Araujo VER VIDEO_ESTRUCTURA

2
La biomecánica estudia en el cuerpo humano, en su aparato locomotor, preferentemente aquellas particularidades de la estructura y funciones que tienen importancia para el perfeccionamiento de los movimientos. Sin detenerse en los detalles de la estructura anatómica y de los mecanismos fisiológicos del aparato locomotor, analiza un modelo simplificado del cuerpo humano: sistema biomecánico De esta forma, el sistema biomecánico es una copia simplificada, un modelo del cuerpo humano en el cual se pueden estudiar las leyes de los movimientos.

3
Elementos esenciales del cuerpo humano: - Huesos - Articulaciones
El aparato locomotor es el elemento del cuerpo humano encargado de producir el movimiento por eso debe estudiarse bajo el aspecto mecánico Elementos esenciales del cuerpo humano: - Huesos - Articulaciones - Músculos - Tendones - Ligamentos VER VIDEO

4
Segmentos del cuerpo humano
1 4 2 3 6 5 7 8 11 12 9 10 13 14 Son 14 los segmentos en que se divide el hombre

5
PAR BIOCINEMÁTICO Un par biocinemático es la unión móvil de 2 miembros óseos, en la cual las posibilidades de los movimientos están determinadas por la estructura de esa unión y por la influencia de dirección de los músculos Par biocinemático

6
La cadena biocinemática es la unión sucesiva, ya sea abierta o cerrada, de una serie de pares biocinemáticos

7
A las cadenas biocinemáticas están aplicadas fuerzas (cargas), que provocan deformaciones de los miembros del cuerpo y variación del movimiento de dichos miembros.
, que provocan deformaciones de los miembros del cuerpo y variación del movimiento de dichos miembros.")
9
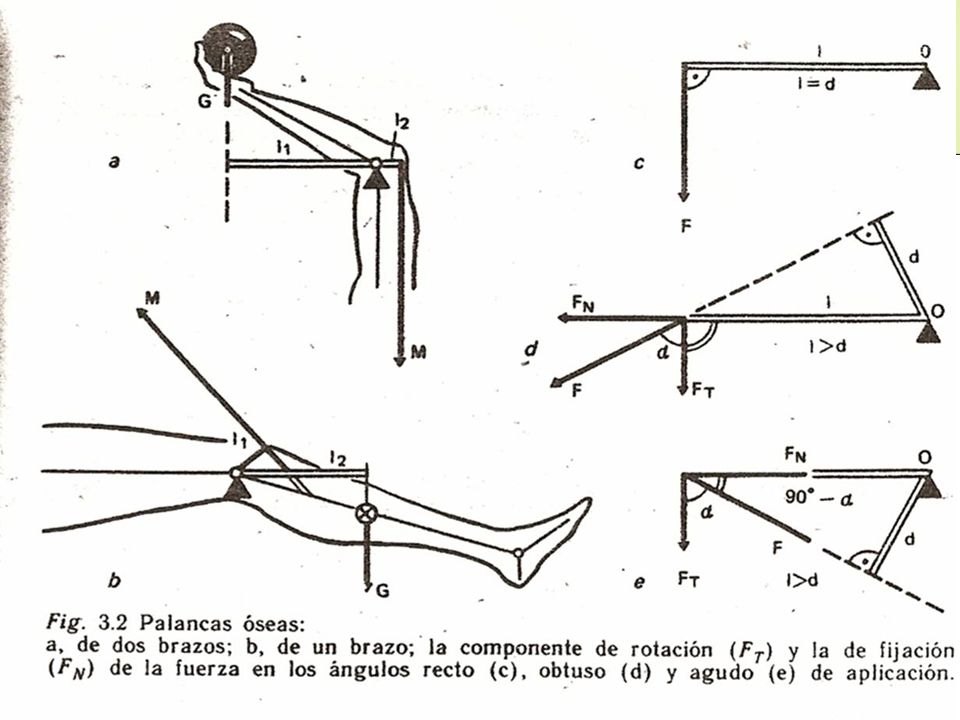
LOS MIEMBROS DEL CUERPO COMO PALANCAS Y PÉNDULOS
Los huesos, como miembros rígidos (no flexibles), al unirse de manera móvil forman la base de las cadenas biocinemáticas. Las fuerzas aplicadas actúan sobre los miembros como lo harían sobre palancas o péndulos. En muchos casos los miembros, como péndulos, conservan el movimiento bajo la acción de las fuerzas aplicadas.
, al unirse de manera móvil forman la base de las cadenas biocinemáticas. Las fuerzas aplicadas actúan sobre los miembros como lo harían sobre palancas o péndulos. En muchos casos los miembros, como péndulos, conservan el movimiento bajo la acción de las fuerzas aplicadas.")
10
PALANCAS La palanca es una máquina simple compuesta por una barra rígida que puede girar libremente alrededor de un punto de apoyo, o fulcro, y sirve para transmitir una fuerza. Puede utilizarse para amplificar la fuerza mecánica que se aplica a un objeto, incrementar la distancia recorrida, o su velocidad, en respuesta a la aplicación de una fuerza. Las palancas óseas: sirven para trasmitir el movimiento y el trabajo a distancia VER VIDEO_PALANCAS

11
Tipos de palanca Las palancas se dividen en tres tipos o géneros, dependiendo de la posición relativa del fulcro y los puntos de aplicación de las fuerzas: potencia y resistencia. El principio de la palanca es válido indistintamente del tipo, pero el efecto y forma de uso de cada tipo de palanca cambia considerablemente. Palanca de primer género En la palanca de primer género, el Punto de apoyo se encuentra situado entre la Potencia y la Resistencia. Ejemplos de este tipo de palanca son el balancín, las tijeras, las tenazas, los alicates, o los remos. En el cuerpo humano se encuentran varios ejemplos de primer género, como el conjunto: triceps - codo - antebrazo

12
Palanca de segundo género
En la palanca de segundo género, la Resistencia se encuentra entre el Punto de apoyo y la Potencia. Ejemplos de este tipo de palanca son la carretilla o el cascanueces.

13
Palanca de tercer género
En la palanca de tercer género, la Potencia se encuentra entre el Punto de apoyo y la Resistencia. Ejemplos de este tipo de palanca son el brazo humano y el quitagrapas. El tercer tipo se caracteriza en que la fuerza aplicada debe ser mayor que la fuerza que se requeriría para mover el objeto sin la palanca. Este tipo de palancas se utiliza cuando lo que se requiere es amplificar la fuerza, distancia o velocidad transmitida a un objeto. Esto también se puede conseguir con la palanca de primer género.

15
PÉNDULOS Cuerpo que puede oscilar suspendido de un punto por medio de una varilla o de un hilo. Los momentos de fuerza se equilibran Si el momento de fuerzas motrices > momento de fuerzas de frenaje Se transmite una aceleración positiva (en el sentido del movimiento) Si el momento de fuerzas de frenaje > momento de fuerzas motrices Se transmite una aceleración negativa (provoca el frenaje del miembro)
 Si el momento de fuerzas de frenaje > momento de fuerzas motrices. Se transmite una aceleración negativa (provoca el frenaje del miembro)")
16
es un vector perpendicular al plano formado por y
Torque: se denomina momento de fuerza, torque, torca, o par (o sencillamente momento) [respecto a un punto fijado B] a la magnitud que viene dada por el producto vectorial de una fuerza por un vector director (también llamado radio vector). Si se denomina F a una fuerza, aplicada en un punto A, su momento respecto a otro punto B viene dado por: Donde: es el vector director que va desde B a A. Por la propia definición del producto vectorial, el momento es un vector perpendicular al plano formado por y Se expresa en unidades de fuerza por unidades de distancia. En el Sistema Internacional de Unidades resulta Newton·metro. El momento de fuerza es equivalente al concepto de par motor, es decir, la fuerza que se tiene que hacer para mover un cuerpo respecto a un punto fijo. Interpretación del momento El momento de una fuerza con respecto a un punto da a conocer en qué medida existe capacidad en una fuerza o desequilibrio de fuerzas para causar la rotación de un cuerpo con respecto a éste. El momento tiende a provocar un giro en el cuerpo o masa sobre el cual se aplica y es una magnitud característica en elementos que trabajan sometidos a torsión (como los ejes de maquinaria) y en elementos que trabajan sometidos a flexión (como las vigas).
 [respecto a un punto fijado B] a la magnitud que viene dada por el producto vectorial de una fuerza por un vector director (también llamado radio vector). Si se denomina F a una fuerza, aplicada en un punto A, su momento respecto a otro punto B viene dado por: Donde: es el vector director que va desde B a A. Por la propia definición del producto vectorial, el momento. es un vector perpendicular al plano formado por. y. Se expresa en unidades de fuerza por unidades de distancia. En el Sistema Internacional de Unidades resulta Newton·metro. El momento de fuerza es equivalente al concepto de par motor, es decir, la fuerza que se tiene que hacer para mover un cuerpo respecto a un punto fijo. Interpretación del momento. El momento de una fuerza con respecto a un punto da a conocer en qué medida existe capacidad en una fuerza o desequilibrio de fuerzas para causar la rotación de un cuerpo con respecto a éste. El momento tiende a provocar un giro en el cuerpo o masa sobre el cual se aplica y es una magnitud característica en elementos que trabajan sometidos a torsión (como los ejes de maquinaria) y en elementos que trabajan sometidos a flexión (como las vigas).")
17
En este movimiento se encuentran varías palancas, además se forma un péndulo en las piernas, ya que hacen un movimiento oscilatorio igual que en los brazos

18
LEYES DE LA MECÁNICA APLICADA AL ESTUDIO DE LOS MOVIMIENTOS DEL HOMBRE.
1era. Ley de Newton o Ley de Inercia de Galileo. “Un cuerpo que se encuentra en estado de reposo o en movimiento uniforme permanecerá en ese estado a menos que una fuerza externa o no equilibrada actúe sobre él”. 2da. Ley de Newton. “Siempre que una fuerza no equilibrada actúe sobre un cuerpo, se produce una aceleración en la dirección de la fuerza que será directamente proporcional a la fuerza aplicada e inversamente proporcional a la masa del cuerpo”. Matemáticamente se expresa: F = m.a Donde: F= Fuerza en Newtons m= Masa en Kg a= Aceleración en m/s² 3era. Ley de Newton. “Todo cuerpo que aplica a otro una fuerza recibe de este una fuerza igual en magnitud y dirección pero de sentido opuesto”. Esto implica que a toda fuerza de acción corresponde una fuerza de reacción. F A/B = - F B/A

Presentaciones similares




>")
>")












 a una magnitud vectorial, obtenida como producto.>")

