Descargar la presentación
La descarga está en progreso. Por favor, espere

1
SENSORES Y ACTUADORES

2
Los sistemas controlados por computador monitorean continuamente la condición de operación en los vehículos modernos. A través de sensores, el computador recibe información vital sobre un numero de condiciones, permitiendo que se hagan ajustes menores más rápidamente y más precisamente que en los sistemas mecánicos. Los sensores convierten temperatura, presión, velocidad, posición y otros datos en señales eléctricas digitales y análogas.

3
La señal digital es la más fácil de entender por parte del computador, ya que lee la señal como un 0 o como un 1. La señal análoga debe ser condicionada o convertida a digital , para que el computador la pueda entender

5
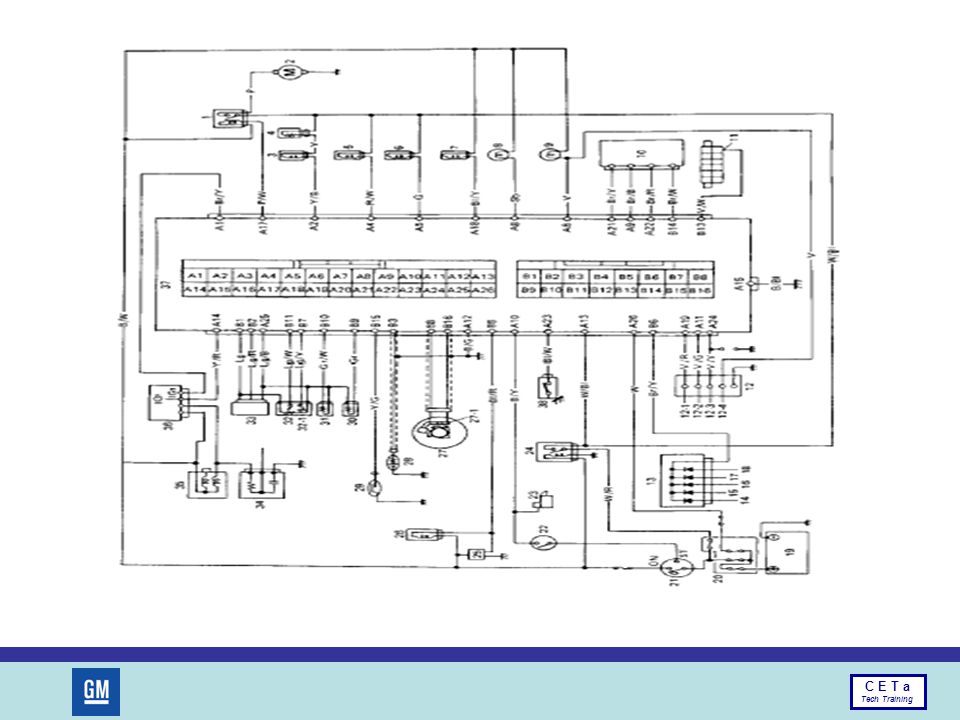
E C M ENTRADAS SALIDAS 1. Power supply(B+) 1. Injectors
2. Main Relay(B+) 3. IG power 4. MAP 5. TPS (MTIA) 6. Motor position sensor (MTIA) 7. Idle switch (MTIA) 8. ECT 9. O2 sensor 10. IAT 11. ACP 12. VSS (M/T) 13. CKP 14. CMP 15. Knock sensor 16. Fuel level sensor 17. Octane select 18. A/C request signal 19. Power steering S/W 20. Ground E C M 1. Injectors 2. Spark timing 3. MTIA motor 4. A/C clutch relay 5. Fuel pump relay 6. MIL 7. Cooling fan(HI, LOW) 8. Canister purge solenoid 9. EGR solenoid 10. VGIS 11. Fuel gage (PWM) 12. Tachometer 13 Coolant Temp gage 14. Serial data (DLC) 15. CAN (Hi & Lo)
 3. IG power. 4. MAP. 5. TPS (MTIA) 6. Motor position sensor. (MTIA) 7. Idle switch (MTIA) 8. ECT. 9. O2 sensor. 10. IAT. 11. ACP. 12. VSS (M/T) 13. CKP. 14. CMP. 15. Knock sensor. 16. Fuel level sensor. 17. Octane select. 18. A/C request signal. 19. Power steering S/W. 20. Ground. E. C. M. 1. Injectors. 2. Spark timing. 3. MTIA motor. 4. A/C clutch relay. 5. Fuel pump relay. 6. MIL. 7. Cooling fan(HI, LOW) 8. Canister purge solenoid. 9. EGR solenoid. 10. VGIS. 11. Fuel gage (PWM) 12. Tachometer. 13 Coolant Temp gage. 14. Serial data (DLC) 15. CAN (Hi & Lo)")
6
Calculo de la cantidad de Aire – combustible Sensores que intervienen
RPM se miden con el CKP o CMP La densidad depende de la Presión y de la temperatura La presión se mide con el MAP La temperatura del aire con el IAT Estos sensores son los básicos para el cálculo inicial

7
Compensaciones Arranque: Se cambia la relación en 2 punto enriqueciéndola (12,5 a 1). Sensor usado: RPM, MAP y IAT Arranque en frió: Se cambia la relación en 2 punto enriqueciéndola, mas la compensación por temperatura ( A 20°C es de 7,0 a 1 ), en total el quedaría a 20°C en 5,0 a 1. Sensor usado: RPM, MAP, IAT y ECT Arranque ahogado: Esta condición se da si tratamos de arrancar el vehículo con el acelerador presionado y el TPS indica mas del 80%, entonces la relación aire combustible se colocara en 20,0 a 1 Sensores utilizados: RPM, MAP, IAT y TPS
, en total el quedaría a 20°C en 5,0 a 1. Sensor usado: RPM, MAP, IAT y ECT. Arranque ahogado: Esta condición se da si tratamos de arrancar el vehículo con el acelerador presionado y el TPS indica mas del 80%, entonces la relación aire combustible se colocara en 20,0 a 1. Sensores utilizados: RPM, MAP, IAT y TPS.")
8
Compensaciones Marcha normal: Lazo abierto
En frió habrá compensación por temperatura hasta alcanzar los 80°C donde la relación será 14,7 a 1 Sensores usados: RPM, MAP, IAT y ECT Lazo cerrado: Si el vehículo cuenta con sensor de oxigeno este empezara a actuar cuando este caliente alcanzado la relación 14,7 a 1 incluso antes de alcanzar los 80°C Sensores usados: RPM, MAP, IAT , ECT y O2 Aceleración: Solo cuando hay un incremento en la aceleración (voltaje del TPS aumenta) y dependiendo de la velocidad con que se incremente el voltaje, va a cambiar la relación aire combustible (Entre 12.5 a 14.7 a 1) Sensor usado: RPM, MAP, IAT , ECT y TPS
 y dependiendo de la velocidad con que se incremente el voltaje, va a cambiar la relación aire combustible (Entre 12.5 a 14.7 a 1) Sensor usado: RPM, MAP, IAT , ECT y TPS.")
9
Compensaciones Potencia: Si mantengo presionado el pedal del acelerador por encima de un valor determinado (> al 80%) la relación aire combustible se mantendrá rica (12.5 a 1) Sensor usado: RPM, MAP, IAT , TPS y ECT Corte de combustible: Esta condición se da cuando el TPS registra un cierre total, pero las revoluciones en el motor son superiores a 1500 RPM Sensores usados: RPM y TPS Desaceleración: Solo cuando hay un decrecimiento en la aceleración (voltaje del TPS disminuye). La relación se mantendrá en 16.5 a 1 siempre y cuando el valor del TPS no llegue al mínimo, o si esto pasara las RPM deberán estar entre la mínima y 1500. Sensor usado: RPM, MAP, IAT y TPS
 la relación aire combustible se mantendrá rica (12.5 a 1) Sensor usado: RPM, MAP, IAT , TPS y ECT. Corte de combustible: Esta condición se da cuando el TPS registra un cierre total, pero las revoluciones en el motor son superiores a 1500 RPM. Sensores usados: RPM y TPS. Desaceleración: Solo cuando hay un decrecimiento en la aceleración (voltaje del TPS disminuye). La relación se mantendrá en 16.5 a 1 siempre y cuando el valor del TPS no llegue al mínimo, o si esto pasara las RPM deberán estar entre la mínima y Sensor usado: RPM, MAP, IAT y TPS.")
10
Compensaciones Corrección por voltaje de batería: Como la capacidad del campo magnético que actúa en el inyector depende de la corriente que circula por la bobina de este, y de esta capacidad del campo depende la velocidad con que abre el inyector, un cambio en el voltaje traerá como consecuencia un cambio en el amperaje y por tanto en el campo. Si se incrementa el campo entonces habrá mas entrega de combustible. Por lo tanto deberá haber una compensación a los cambios de voltaje Sensor usado: RPM, MAP, IAT , TPS, voltaje y ECT

11
Compensaciones Marcha mínima. Condiciones: Relación aire combustible
RPM predeterminadas Elementos a tener en cuenta: Básicos: RPM, TPS, IAT Complementarios: ECT porque las RPM pueden variar dependiendo de la temperatura. TPS es el elemento que nos indica si debemos controlar o no la IAC y el valor de RPM que se van a fijar. O2 para mantener la relación aire/combustible en 14.7:1 VSS determina los pasos de la IAC acorde con la velocidad. RPM se requiere un valor mínimo para iniciar control. A/C genera carga de motor en marcha mínima y debe ser compensada aumentando los pasos de la IAC. Carga Eléctrica: luces, desempañador trasero, ventilador del calefactor, otros con alto consumo. PSPS para compensar la carga generada por la bomba hidráulica.

12
Características básicas de los sensores
Procesos de medidaPrecisión Error máximo esperado. Offset Desviación del cero. Linealidad Desviación respecto de una línea recta en la curva de respuesta. Sensibilidad Variación de la magnitud de salida al variar la magnitud a medir. Margen de medida Rango de variación de la magnitud a medir en el que se asegura una cierta precisión. Resolución Mínima variación de la magnitud de entrada que puede apreciarse a la salida. Rapidez de respuesta Capacidad del sistema de medida para seguir las variaciones de la magnitud de entrada. Histeresis Las medidas pueden ser diferentes en avance que en retroceso Repetitividad Error esperado al repetir varias veces la misma medida.

13
Activos: Generan una señal eléctrica.
Tipos de sensores Activos y pasivos Activos: Generan una señal eléctrica. Pasivos: Modifican una característica eléctrica (interruptor, capacidad, resistencia,etc) Directos y de accionamiento intermedio Directos: La magnitud de salida se obtiene directamente. Con accionamiento intermedio: La magnitud de entrada se convierte en otra que es medida directamente. Analógicos y Digitales Analógicos: Devuelven una señal de tipo continuo. Digitales: Devuelven una señal de tipo discreto
 Directos y de accionamiento intermedio. Directos: La magnitud de salida se obtiene directamente. Con accionamiento intermedio: La magnitud de entrada se convierte en otra que es medida directamente. Analógicos y Digitales. Analógicos: Devuelven una señal de tipo continuo. Digitales: Devuelven una señal de tipo discreto.")
14
Un transductor es un elemento que convierte una magnitud física en otra.
Un sensor es un tipo de transductor que convierte la magnitud a medir en una característica eléctrica. Ejemplo: Un termómetro de mercurio es un transductor que da una desplazamiento proporcional a la temperatura.

15
Sensores de presión Se puede dividir en 5 áreas básicas
Presión manométrica Presión absoluta Presión diferencial Nivel de líquido Interruptor de presión

16
Aplicaciones Multiple, Barométrica y Refuerzo Tanque de combustible
Presión de aceite A/C Presión de inflado EGR Cabina

17
TECNOLOGIA DIAFRAGMA Y POTENCIOMETRO TRANSF. LINEAL DIFF. VARIABLE
ANAEROIDE CAPACITOR CERAMICO O SILICIO GALGA PIEZOELECTRICA CERAMICA O PELICULA PIEZOE. CAMBIO DE FASE OPTICO

18
Sensores de presión

19
Presión Manométrica Generalmente indicado por psig
Es aquella cuyo cero no se ve afectado por condiciones atmosféricas Es la que utilizamos cuando vamos a tomar por ejemplo la presión de aceite o la de la bomba de combustible.

20
psi In H2O In Hg Kpascal milibar cm H2O mm Hg 1 27,68 2,03 6,89 68,94
70,38 51,71 0,03 0,07 0,24 2,49 2,54 1,86 0,49 13,59 3,38 33,86 34,53 25,4 0,14 4,01 0,29 10,0 10,19 7,5 0,014 0,40 0,02 0,1 1,01 0,75 0,39 0,098 0,98 0,73 0,019 0,53 0,13 1,33 1,35

21
Presión absoluta Es realizada con respecto a una referencia fija (usualmente vacío), sellada dentro del sensor. El chip de silicón flecta con los cambios de presión, esto determina el nivel de voltaje de salida La presión absoluta es indicada en psia

22
Sensor de presión Chip silicon Chip silicon filtro Presión de admisión
Cámara de vacío filtro Cámara de vacío Presión de admisión Presión de admisión

23
El sensor MAP El sensor MAP utiliza un perfecto vacío como presión de referencia. La diferencia entre la presión de vacío y la presión de admisión, cambia la señal de voltaje. El sensor MAP convierte la presión de admisión en una señal de voltaje.

24
Presión en el múltiple de admisión
Sensor MAP Cuando la presión en el múltiple incrementa, el voltaje de salida aumenta Presión en el múltiple de admisión

25
Diagnóstico sensor MAP
El sensor MAP puede originar una variedad de problemas de manejabilidad, ya que es un sensor importante para determinar la inyección de combustible y el tiempo de encendido. Revisar visualmente los sensores, conexiones y mangueras de vacío. La manguera de vacío no debe tener grietas, obstrucciones y conectada al puerto apropiado. El sensor necesita un voltaje aproximadamente 5 voltios y el cable de tierra no debe tener resistencia. La calibración del sensor y su desempeño deben ser chequeados aplicando diferentes presiones y comparándolas con las caídas de voltaje especificadas.

26
Sensor de presión barométrica
El sensor de presión barométrica, algunas veces llamado un Compensador de altitud (HAC), mide la presión atmosférica. La presión atmosférica varía con el clima y con la altitud. A grandes elevaciones el aire es menos denso, por lo tanto, hay menos presión. Este sensor opera de la misma manera que el MAP excepto que mide presión atmosférica. Se localiza generalmente dentro del ECM. Si se daña, el módulo completo debe ser reemplazado.
, mide la presión atmosférica. La presión atmosférica varía con el clima y con la altitud. A grandes elevaciones el aire es menos denso, por lo tanto, hay menos presión. Este sensor opera de la misma manera que el MAP excepto que mide presión atmosférica. Se localiza generalmente dentro del ECM. Si se daña, el módulo completo debe ser reemplazado.")
27
Sensor de presión de vapor
El sensor de presión de vapor (VPS) mide la presión de vapor en el sistema de control de evaporaciones EVAP. Puede estar localizado en el tanque de combustible, cerca al canister o en una posición remota
 mide la presión de vapor en el sistema de control de evaporaciones EVAP. Puede estar localizado en el tanque de combustible, cerca al canister o en una posición remota.")
28
VPS La presión dentro de la cámara de referencia cambia con la presión atmosférica, esto hace que la presión de referencia incremente con un incremento en la presión atmosférica. Es extremamente sensible a cambios en la presión

29
Sensor piezoeléctrico

30
Sensor Piezoeléctrico
Produce un cambio en la corriente eléctrica cuando una carga es aplicada en una de las caras de un cristal o una película piezoeléctrica su inherente habilidad para sensar vibraciones ha sido tenida en cuenta para diseñar los nuevos sensores Se utilizan para sensar presión en A/C

31
Interruptor por presión
Es logrado montando un contacto eléctrico sobre un diafragma de material flexible, la aplicación de suficiente presión sobre un lado del diafragma hace que los contactos se unan y cierren el circuito. O también con las técnicas anteriormente descritas

32
Sensores de posición Pueden ser agrupados en dos categorías básicas:
Incrementales o absolutos De contacto o proximidad

33
Sensor de posición TECNOLOGIA - Micro interruptores - Ópticos
- Potenciómetros - Magnéticos - Efecto Hall - Inductivos - Magneto resistivo - Magnetostrictivo

34
Micro interruptores La forma mas simple de un sensor de contacto es un interruptor Una característica indeseable de estos es su tendencia a rebotar

35
Ópticos Codificadores ópticos para detectar la posición angular, son construidos de un disco con sectores, opacos y transparentes igualmente espaciados Este disco puede ser construido de vidrio para aplicaciones de gran precisión Película de Mylar y metal ofrecen rangos de alta y media resolución, respectivamente

36
Potenciómetros Son ampliamente usados como sensores de posición, tales como posición de acelerador y posición de pedal. La industria del automóvil demanda sensores de bajo costo. Esto ha resultado en el desarrollo de potenciómetros que tienen un promedio de vida mayor que la del mismo vehículo

37
Potenciómetros Son usados como divisores de voltaje
Un voltaje de referencia es aplicado al elemento resistivo Y la caída de tensión es usada como una medida de la posición absoluta Tienen restricción de 355 grados Ratiometricidad: es una característica deseable cuando es usado con CA/D

38
Potenciómetros Están sujetos a errores, de los cuales la linealidad es el más importante. Es la diferencia entre la función de transferencia actual y la ideal Ratiometricidad, linealidad y Offset pueden ser causador por carga inapropiada sobre la escobilla del sensor El máximo error se encuentra en el centro del recorrido

39
Sensores de posición Magnéticos
Tienen algunas ventajas sobre otros tipos de Sensores Este tipo de Sensores responde a cambios en la posición relativa de un componente en un circuito magnético Los componentes están separados por aire y no sufren a desgaste por fricción

40
Sensores de posición Magnéticos
Se pueden clasificar en Reluctancia variable Efecto Hall Inductivos Magnetoresistivos Magnetostrictivo Otros

41
Reluctancia variable Operan sensando los cambios de reluctancia en un campo magnético En alguna casos el cambio de reluctancia se causa por cambios en la longitud del calibre de aire El cambio en la reluctancia causa una variación en el flujo magnético, el cual induce un voltaje en una bobina de salida

42
Reluctancia variable Son usados para detectar la posición y la velocidad de una rueda dentada. Esta formado por un núcleo magnético con una bobina enrollada La terminación sensora es colocada muy cerca del diente de la rueda El cambio de flujo magnético que ocurre cuando un diente pasa, induce un voltaje en la bobina

43
Reluctancia variable Son susceptibles a fuentes de error
Vibraciones o resonancia producidas por las fuerzas de atracción entre el sensor y el objetivo pueden degenerar la señal a ruido Corrientes parásitas pueden ser generadas por el movimiento de la rueda dentro del campo magnético del sensor

44
Reluctancia variable Ventajas Construcción simple Bajo costo
Amplio rango de temperatura de operación Requiere solo dos cables Pueden ser usados como sensores de inductancia variable

45
CMP

46
CARACTERISTICAS El voltaje generado puede depender de muchos factores
La velocidad de rotación La proximidad del sensor La fuerza del campo magnético La característica de un buen sensor, es la onda seno que incrementa en magnitud con la velocidad

47
EFECTO HALL

48
EFECTO HALL

49
EFECTO HALL

50
EFECTO HALL

51
EFECTO HALL

52
EFECTO HALL

53
EFECTO HALL

54
EFECTO HALL

55
Sensor de desplazamiento inductivo

56
Consiste de un núcleo en forma de E con una bobina en la terminal central de la E
Esta bobina es excitada con corriente alterna de alta frecuencia Un anillo de material conductor (Al, Cu), se desliza en la terminal central de la E, permitiendo tener un aislante de aire Este anillo se une al componente al cual se le quiere conocer su posición
, se desliza en la terminal central de la E, permitiendo tener un aislante de aire. Este anillo se une al componente al cual se le quiere conocer su posición.")
57
Sensor de desplazamiento inductivo
Este anillo tiene un efecto de sombra, evitando que haya un acoplamiento de flujo entre las terminales del núcleo, desde esta posición y la terminal central del núcleo Un cambio en la inductancia puede ser medido en los terminales de excitación de la bobina

58
LVDT Sensor inductivo de desplazamiento lineal
Linear variable displacement transformer Son fuertes, confiables y capacitados para trabajar en ambientes hostiles Apropiado para aplicaciones automotrices, incluyendo montajes dentro de cilindros hidráulicos, en sistemas de control de suspensión

59
LVDT Esta formado por una bobina primaria montada centralmente sobre un cilindro Dos bobinas secundarias, idénticas son posicionadas a cada lado de la primaria Las bobinas tienen un núcleo común el cual se puede desplazar libremente dentro del cilindro Las bobinas secundarias son conectadas en serie, con fases opuestas, tal que con el núcleo posicionado en el centro, el voltaje en el nodo común sea cero

60
LVDT Con esta conexión, cuando el núcleo es movido desde un extremo pasando por cero hasta el otro extremo, la señal de salida puede variar desde un máximo valor en fase con la excitación pasando por cero hasta un máximo valor en contra fase con la excitación

61
LVDT Están diseñados para dar una respuesta lineal dentro de alguna tolerancia ± 0,25% La distribución de la vueltas del secundario debe ser arreglada muy cuidadosamente para maximizar la linealidad sobre un amplio rango El rango de excitación del primario puede ser desde 20Hz hasta 20KHz

62
Magnetoresistivo Un interesante grupo de sensores utiliza la propiedad de algunas aleaciones de FeNi Su resistividad es fuertemente afectada por la presencia de un campo magnético Permalloy compuesto de 81%Ni y 19%Fe La resistencia disminuye con el incremento del campo magnético

63
Magnetoresistivo La relación entre campo magnético y resistividad no es lineal Son sensores de alta sensibilidad Pero son muy sensibles a interferencias por otros campos no deseados Por lo cual son inadecuados para algunas aplicaciones

64
Magnetostrictivo Es una propiedad de los materiales que responde a un cambio de flujo magnético, desarrollando una deformación elástica de su estructura cristalina El sensor envía una onda usando un medio electromagnético, usualmente un pulso de corriente La onda pasa a un anillo magnético móvil distante del anillo receptor La onda viaja aprox. a 2800m/s generando un cambio de flujo magnético, induciendo un pulso de voltaje en la bobina sensora

65
Sensor de flujo La medición del flujo de aire es importante para optimizar el desempeño de muchos puntos claves de control de subsistemas del motor estos reemplazan la medición indirecta de la masa de aire, mejorando el desempeño, manejabilidad y economía el ECM necesita conocer el volumen de aire para saber la carga sobre el motor

66
Sensor de flujo Esto es necesario para saber:
cuanto combustible ha de ser inyectado avance de encendido momento de realizar el cambio en la transmisión se encuentra ubicado entre el filtro de aire y el cuerpo de aceleración

67
Clasificacion Se pueden clasificar en:
Aditivos o extractores de energía Medidores de masa o volumen de flujo

68
Aditivos El paso de un fluido posee energía, tanto potencial como cinética Un sistema de medición extrae energía del fluido De otra forma, energía puede ser adicionada al flujo y observar su efecto La energía adicionada no debe ser intrusiva, tal que el acto de medir no afecte el proceso

69
Masa o Volumen La presión y la temperatura del aire deben ser medidos para calcular la masa de un volumen medido. ma = Va ρ Donde: ρ = densidad del aire Va = rata de flujo volumétrico

70
La densidad es calculada así: ρ = P/(ZRaTa)
Donde: P = presión del aire Z = factor de compresibilidad Ra = constante del gas para el aire Ta = temperatura del aire

71
Tecnología Cortina Térmico Presión diferencial Turbina vortice

72
Cortina deslizante potenciómetro Plato de compensación
Cuerpo aceleración Ajuste de ralenti Passaje bypass Plato de medición Filtro de aire resorte IAT

73
Cortina Consiste de una cortina la cual esta localizada en el ducto del flujo y es retenida por un resorte, para bloquear el paso del aire La deflexión de la cortina es proporcional al flujo La deflexión es leída por un potenciómetro

74
Cortina

75
Cortina

76
Cortina Problemas; Generalmente presenta una reducción de la eficiencia volumétrica Fue utilizado en los primeros sistemas de control, ahora ha sido reemplazado por otras tecnologías que ofrecen menor caída de presión

77
TERMICO Dependiendo del diseño, provee un medición directa del flujo de aire muy acertada que simplifica las estrategias de control del motor Existe una gran variedad de diseños desde el de hilo caliente hasta esquemas mas complejos

78
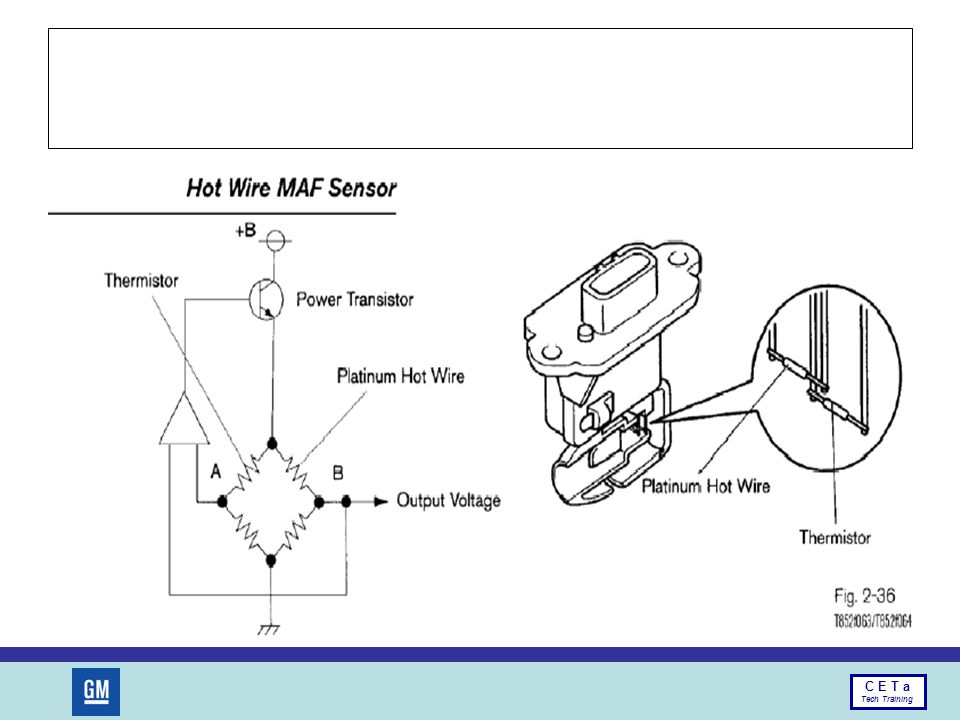
Hilo Caliente La idea básica es calentar un hilo muy fino, entonces el aire que pasa por este remueve calor por conveccion. La cantidad de calor removido puede ser medido con un circuito electrónico y es proporcional a la rata de masa de flujo de aire

79
MAF Los principales componentes del MAF son: Termistor
Alambre de platino Circuito de control electrónico

80
El termistor mide la temperatura del aire que entra
El hilo caliente es mantenido a una temperatura constante en relación con el termistor por medio de un circuito de control Un incremento en el flujo de aire produce una perdida de calor, al pasar aire por el hilo caliente este pierde calor rápidamente, el circuito electrónico trata de compensar esto enviando mayor cantidad de corriente al alambre

81
El circuito de control electrónico simultáneamente mide la corriente y envía una señal de voltaje proporcional al flujo de corriente uno de los problemas con estos sensores es que pequeñas partículas de polvo pasan a través del filtro aire adhiriéndose al hilo perdiendo eficiencia, en WOT, la velocidad de las partículas puede romper el hilo

82
Algunos sistemas incorporan un canal de desviación o implementan un ciclo de quemado en el momento de inicio. Otros sistemas utilizan un alambre de platino recubierto en vidrio para aislarlo de las partículas de polvo Otros utilizan una malla para direccionar el flujo

83
FUNCION DE TRANSFERENCIA

84
PRESION DIFERENCIAL Una manera simple de medir el flujo volumétrico es colocando una obstrucción en el canal de flujo y medir la presión diferencial El flujo es proporcional a la raíz cuadrada de la presión diferencial Para aplicaciones automotrices es supremamente costoso Un gran ventaja es su resistencia a la contaminación

85
TURBINA Una turbina instalada en el canal del flujo ofrece baja resistencia a este, midiendo la velocidad de rotación se puede medir el flujo. Es muy susceptible al desgaste Se utiliza para medir el flujo de combustible

86
Vortex Oscilaciones pueden ser inducidas en un fluido, colocando una obstrucción en el camino del fluido. Las oscilación puede ser medida térmicamente, por cambios de presión o por ultrasonido. No trabajan bien en flujos bajos, debido a la inestabilidad del mecanismo

87
Vortex

88
Temperatura, Calor, Humedad
Teniendo en cuenta los efectos de la temperatura en el desempeño y fiabilidad de los componentes del automóvil, son muy importantes los componentes que están encargados de medir y controlar la temperatura en el automóvil

89
Conducción, Convección y Radicación
La energía calórica es transferida con sus correspondientes cambios de temperatura. Conducción ocurre por difusión a través de materiales sólidos o en líquidos y gases estacionarios Convección envuelve el movimiento de un liquido o gas entre dos puntos La radiación ocurre por medio de ondas electromagnéticas

90
Fuentes de calor Además del aumento de temperatura que puede ser generada por la luz solar sobre el metal y vidrio que forman la carrocería del vehículo, existen una gran variedad de generadores de calor, pero la principal fuente es el motor de combustión, el cual puede llegar a temperaturas superiores a los 1000 ˚C en la cámara de combustión

91
Sensores de temperatura
Adicionalmente a los rangos de temperatura a medir se deben tomar en consideración otros factores de selección, tales como linealidad, tiempo de respuesta, presentación, confiabilidad y costos. Los sensores pueden ser tan simples como un termómetro de mercurio o tan complejos como sensores infrarrojos usados en visión nocturna

92
Sensores de temperatura
Técnica Rango de temperatura`

93
Sensores de temperatura
Termómetros resistivos PRT (Platinum Resistence Thermometer) Termistores NTC (Negative Temperature Coefficient) PTC (Positive Temperature Coefficient) Termopares Se basan en el efecto Seebeck Semiconductores Económicos
 Termistores. NTC (Negative Temperature Coefficient) PTC (Positive Temperature Coefficient) Termopares. Se basan en el efecto Seebeck. Semiconductores. Económicos.")
94
PRT (Platinum Resistence Thermometer)
Termómetros resistivos PRT (Platinum Resistence Thermometer) Se basan en la variación de resistencia con la temperatura Margen de medida -200°C hasta 850°C Características Tienen problemas de sensibilidad Son muy precisas Son costosos Tienen buena linealidad, fáciles de calibrar Alto margen de medida Bajas derivas
 Se basan en la variación de resistencia con la temperatura. Margen de medida. -200°C hasta 850°C. Características. Tienen problemas de sensibilidad. Son muy precisas. Son costosos. Tienen buena linealidad, fáciles de calibrar. Alto margen de medida. Bajas derivas.")
95
RTDs Un Detector Resistivo de Temperatura, fabricado de platino, es el sensor de mayor precisión Una corriente constante es aplicada al RTD para obtener un voltaje de salida, sobre un rango de -200˚C a 850˚C la linealidad puede estar dentro del 3.6% Ni, Ni-Fe, Cu, Al Delgadas películas pueden ser aplicadas a sustratos de cerámica o Silicio

96
Termistores Es una clase especial de resistencia sensible a la temperatura, basado en un tipo de material semiconductor que exhibe un amplio rango de coeficiente de temperatura La resistividad depende del material del que esta construido el termistor Se puede tener NTC y PTC

97
Termistores Tienen coeficientes más altos, aunque con peor linealidad
NTC (Negative temperature coefficient) PTC (Positive temperature coefficient)
 PTC (Positive temperature coefficient)")
98
Termistores Como se puede observar, su respuesta es no lineal, pero esto puede ser soportado en muchas aplicaciones automotrices o corregidas por un circuito. Por ejemplo la resistencia del termistor se hace coincidir con el punto de operación normal del medidor El rango va desde -250˚C hasta 650˚C

99
Termopares Se usan con frecuencia en la fase de desarrollo del vehículo por su bajo costo Tienen un amplio rango de medición de temperaturas que son posibles desde una simple termocupla de Hierro-Constantan, fácilmente extiende el rango con otros materiales. Formas pequeñas

100
Termopares o Termocuplas
Se basan en el efecto “Seebeck”: “Si dos metales distintos se unen por los puntos a diferentes temperaturas, se produce una circulación de corriente eléctrica” Si se abre el circuito por uno de los metales, se tendrá una tensión proporcional a la diferencia de temperaturas (potencial termoeléctrico)
")
101
Bimetálico El interruptor bimetálico utiliza dos tiras de metal con diferentes coeficientes de expansión lineal, que se encuentran soldados juntos El punto de interrupción puede ser establecido por una calibración inicial que indica que una temperatura crítica ha sido alcanzada y da una entrada a una unidad de control o una lampara

102
Bimetálico El uso de interruptores no requiere conversión A/D en sistemas de control con microcontroladores Provee información limitada del sistema Los primeros sistemas usaron bimetálico en la carcaza del filtro de aire para indicar temperaturas inferiores a 13˚C

103
Potenciómetro Un actuador bimetálico puede ser combinado con un potenciómetro de alta resolución El movimiento lineal de una pila bimetálica es transmitida por tubo de acero y medida como una distancia, dando una indicación lineal de temperaturas hasta de 650˚C

104
Semiconductores Muchos parámetros de los semiconductores varían linealmente sobre el rango de temperatura de operación El más común factor de referencia es la relación Temperatura vs. VBE Un sensor que utiliza este efecto tiene una salida nominal de 730mv a -40˚C y de 300mv a 150˚C

105
Semiconductores Son baratos y fáciles de usar Características
En un diodo, con una corriente fija, la tensión entre los terminales varía 2mV/°C aproximadamente. Características Son baratos y fáciles de usar Tienen un margen de medida bajo (-50° 150°C

106
Semiconductores La precisión esta entre ±3mv
Una corriente constante (colector) de 0,1 mA, pasa a través del dispositivo para minimizar el efecto de auto calentamiento de la unión El coeficiente de un diodo es de 1,9mV/˚C, diodos en serie aumentan la salida El tiempo de respuesta de un diodo es menor de 100μs
 de 0,1 mA, pasa a través del dispositivo para minimizar el efecto de auto calentamiento de la unión. El coeficiente de un diodo es de 1,9mV/˚C, diodos en serie aumentan la salida. El tiempo de respuesta de un diodo es menor de 100μs.")
107
Termostato Sensor mecánico de temperatura
El método mas antiguo de regulación de temperatura usado en los vehículos y usado aun es el termostato

108
Fibra Óptica Sensores de alta temperatura, capaces de medir hasta 1800˚C Tiempo de respuesta del orden de 500ms La precisión esta dentro del ±0,5% Sensor de no contacto Diámetro de salida de 0,5 a 1mm Soporta hasta 4000˚C Se ha utilizado para detectar detonación y estudiar el frente de llama

109
Indicadores de Temp. Materiales diseñados con puntos de fusión que pueden ser calibrados a ±1˚C Cuando la temperatura del dispositivo se excede, ocurre un cambio de fase y el material cambia de color El material esta disponible en pintura, parches, barras de aplicación En rangos desde 38˚C hasta 1371˚C

110
Infrarrojo La emisión de los cuerpos negros es la base de la termometría IR Objetos a temp. superiores a -273˚C emiten energia radiante la cual es proporcional a la cuarta potencia de su temperatura Un sensor IR consiste de una colección de lentes o fibra óptica, filtro espectral y un detector

111
Infrarrojo La característica primaria, es el campo de visión, el cual permite un objetivo especifico a una distancia prescrita Sensores IR usan las variaciones de temperatura para producir una imagen monocromática en sistemas de visión nocturna Identifican potenciales puntos de falla

112
Humedad Sensores de humedad son ampliamente usados durante la fase desarrollo El desempeño del motor puede ser afectado por la humedad El sistema HVAC puede ser muy beneficiado con esta medición No son utilizados en los vehículos producidos en la actualidad

113
Humedad La técnica mas conocida es la lectura de termómetro de bulbo seco y húmedo interpretada por el cuadro sicrométrico Tres técnicas tienen potencial aplicación en el futuro Capacitiva Resistiva Oxido de Silicio poroso

114
Capacitivo La constante dieléctrica de delgadas películas de polímero cambian linealmente con los cambios en la humedad relativa en la atmósfera

115
Resistivo En una película gruesa de polímero, hay movimiento de iones con la variación de la HR, resultando en un cambio de la resistividad Un diodo compensador de temperatura es usado para mejorar la precisión Con una excitación de AC a 1 kHz, un cambio de 10 a 100% de HR produce una variación de 2*107 a 2*103 Ώ

116
Oxido de silicio Un sensor de tipo capacitivo ha sido desarrollado utilizando OPS, como un dieléctrico absorbente de humedad, entre los electrodos de un capacitor Un proceso de electrolisis ha sido usado para crear una delgada capa porosa sobre la parte superior de una galleta de silicio

117
Oxido de silicio El silicio es oxidado por medio de un proceso a alta temperatura en presencia de oxigeno o de vapor Electrodos metálicos son depositados en ambas caras del OPS para completar la estructura capacitiva Cuando el vapor de agua contacta al sensor, este permea a través de la estructura porosa entre los electrodos.

118
Oxido de silicio La respuesta de un sensor típico, incrementa 800% cuando es expuesto a un cambio de HR entre 1 y 40%

119
Sensor G Los sensores de aceleración varían ampliamente en su fabricación y operación Los hay mecanicos Piezoelectricos Piezoresistivos Capacitivos

120
Mecánicos El interruptor mecánico es un dispositivo que contiene
un resorte una esfera metálica y un contacto eléctrico en un tubo tienen altas tolerancias de maquinado y dan amplia variación en el punto de disparo

121
Mecánicos aceleración

122
Piezoeléctrico Masa sísmica Elemento piezoeléctrico salida soporte

123
Piezoeléctrico Son efectivos en algunas aplicaciones, pero no son capaces de sensar 0 o bajas frecuencias de aceleración, menores de 5Hz y tienen efecto piro eléctrico. Tienen una alta ganancia, bajo amortiguamiento y muy alta impedancia de salida, la gran ventaja es su amplio rango de temperatura (300˚C) y alta frecuencia de operacion (100Hz)
 y alta frecuencia de operacion (100Hz)")
124
Capacitivo Tiene grandes ventajas con respecto a otros métodos
Fácil implementación de auto prueba Insensible a la temperatura Tamaño reducido (500μ x 500μ ) Opera a bajas frecuencias
 Opera a bajas frecuencias.")
125
Capacitivo Se puede aplicar voltaje a sus placas para producir cargas electrostáticas y balancear el sistema en aceleración Espacio entre las placas de 2μ Respuesta lineal Buen amortiguamiento micromaquinados

126
Aplicación Como sensor de impacto en Air Bag Suspensión inteligente
ABS Control de tracción

127
Air Bag Los interruptores mecánicos se deben localizar a ±40 cm del punto de impacto Por lo cual se deben usar múltiples sensores (de 3 a 5) Los sensores únicos localizados centralmente pueden ser PzE, PzR o Capacitivos

128
Air Bag A 48 KPH, el sensor tiene 20ms para detectar un impacto y disparar la bolsa de aire Esto resulta en una activación de la bolsa 50ms después del impacto En este tiempo el ocupante se ha desplazado Aprx. 18 cm Durante los 20ms iniciales se puede llegar a 20g pero el promedio es 5g

129
Air Bag Los sensores centrales tienen ventajas sobre su contraparte mecánica Menos sensores, por lo cual menor costo Mejoramiento en sensado y precisión en el procesamiento de la señal Mejor punto de disparo en diferentes tipos de chasis Puede ser usado como bloqueo de cinturon

130
Suspensión inteligente
Se puede tener suspensión activa, semiactiva y adaptativa Los resortes son remplazados por estaciones de rueda, las cuales están formadas por cilindros llenos de aceite, con un pistón que mantiene la distancia del chasis sobre los ejes Detecta los incrementos de carga

131
Suspensión inteligente
La adaptativa es una alternativa de la anterior La información de las ruedas delanteras es utilizada para predecir las condiciones del terreno y controlar la suspensión trasera Usa menos sensores que la activa

132
Suspensión inteligente
Utiliza los siguientes sensores Acelerómetros (2g) Sensor de velocidad de rueda Distancia de chasis a tierra Recorrido de pistón
 Sensor de velocidad de rueda. Distancia de chasis a tierra. Recorrido de pistón.")
133
Detonación 2khz a 17khz La ubicación depende de cada diseño de motor
Los primeros usados fueron jerk Tienen muchos componentes para ser economicos pasoaltos

134
Detonación Piezoeléctricos El cristal seleccionado es el cuarzo
La señal se puede contaminar fácilmente Piezocerámico Plomo – Zirconio – Titanio Cuando se encuentran en temperatura de fusión, se hacer pasar una corriente a través de los electrodos, y se polarizan

135
Detonación Silicio No es un piezoeléctrico, pero con micro maquinado se puede fabricar un acelerómetro Reemplaza a los piezoceramicos, todo es cuestión de costos

136
ION sensor

137
ION sensor

138
ION sensor

139
ION sensor

140
ION sensor

141
ION sensor

142
ION sensor

143
Hidrofono Como las ondas de la detonación se trasmiten a todas las partes de motor, entonces se instalaron micrófonos en el refrigerante, usando esto como sensor de detonación.

144
λ< 1 exceso de combustible
Gas de escape Los productos de una combustión completa son sustancias no toxicas, como dióxido de carbono y agua Los requerimientos teóricos de aire son de aproximadamente 10m3 por litro de combustible λ = AF/14.7 λ< 1 exceso de combustible

145
ZrO2 Un elemento cerámico consistente de ZrO2 y oxido de yitrium es empleado como un electrolito sólido impermeable a gas Esta mezcla de óxidos son más o menos perfectos conductores de iones de oxigeno sobre un amplio rango de temperaturas sensor

146
Semiconductor TiO2 y SrTiO3 adquieren un rápido equilibrio a temperaturas relativamente bajas Al cambiar las concentraciones de oxigeno, cambia la conductividad La resistencia eléctrica y el tiempo de respuesta son inversamente a la temperatura

147
Principio de operación
Un voltaje es aplicado a la resistencia RT TiO2, instalada en serie con otra de referencia La caída de tensión sobre la serie depende de RT, respectivamente λ En versiones de tres terminales el voltaje es tomado del calentador

148
Factores que afectan Debido a la capa porosa protectora alrededor del electrodo, que se puede saturar, la curva del sensor se puede desplazar hacia el rango de pobreza Este desplazamiento se pude deber a depósitos de aceite y SiO2, los cuales taponan parcialmente los poros de la capa protectora y reducen la temperatura del sensor

149
Factores que afectan Fracturas de la capa protectora disminuyen el tiempo de respuesta del sensor llevando su curva característica hacia riqueza La desactivación del electrodo debido a contaminación con plomo, puede producir una respuesta muy plana Un efecto similar se presenta cuando la referencia atmosférica se contamina con agua o gases

150
Factores que afectan Tensión mecánica producida por vibración por la pulsación de los gases, golpes de piedras y tensión del cable El cable del sensor debe estar sellado para prevenir penetración de agua en su interior, causando distorsión de la referencia, al mismo tiempo este sello debe ser flexible.

151
Sensores de luz Fotovoltaicos
Los Sensores que miden la intensidad de la luz se pueden clasificar en dos tipos: Los que generan electricidad al recibir iluminación. Los que cambian alguna de sus propiedades al ser iluminados. Fotovoltaicos Opto interruptores Opto interruptor reflexivo Opto interruptor ranurado Fotoconductores Fotodiodo LDR (Light dependent resistor)
")
152
Fotovoltaicos Al incidir luz sobre una unión PN se genera una tensión eléctrica que es función de la intensidad de la radiación (principio de celdas solares)
")
153
Opto interruptores Reflexivo Ranurado
Dispositivo para medir otras magnitudes (longitudes, ángulos, etc) o para detectar la presencia o ausencia de un objeto Consiste en un sensor de luz (fototransistor) y una fuente de luz (LED) Reflexivo Ranurado
 o para detectar la presencia o ausencia de un objeto. Consiste en un sensor de luz (fototransistor) y una fuente de luz (LED) Reflexivo. Ranurado.")
154
Fotoconductores Al incidir luz sobre ellos , cambian sus propiedades de conducción eléctrica Fotodiodo Al incidir la luz sobre él, se producirá una circulación de corriente que es proporcional a la intensidad de la luz. Su sensibilidad es baja. Se utilizan los fototransmisores para incrementarla. Velocidad de respuesta alta (1μs o menos) LDR Dispositivo resistivo que disminuye el valor de su resistencia al incrementar la luz. Se hacen con sulfuro de cadmio (SCd) Velocidad de respuesta baja (10 ms) Longitudes de onda entre 380 nm y 750 nm
 LDR. Dispositivo resistivo que disminuye el valor de su resistencia al incrementar la luz. Se hacen con sulfuro de cadmio (SCd) Velocidad de respuesta baja (10 ms) Longitudes de onda entre 380 nm y 750 nm.")
155
Galga extensiométrica: Miden deformaciones variando su resistencia
Sensores de fuerza Galga extensiométrica: Miden deformaciones variando su resistencia Dispositivos piezoeléctricos: Se usan para medir fuerzas. Se caracterizan por generar una salida eléctrica al someterlos a un esfuerzo mecánico

156
Sensores de desplazamiento
Potenciómetros : Producen una señal eléctrica proporcional a su posición

157
Sensores de velocidad Inductivos : La inductancia de una bobina se ve afectada por la presencia de un material ferromagnético.

158
Generadores de voltaje
Piezo eléctricos Dióxido de zirconio Inductancia magnética

159
Resistivos Potenciómetros Termistores Piezoresistivos

160
Interruptores Fototransistores y LEDs Sensores de velocidad Sensores G

161
Actuadores MOTORES PASO A PASO MOTORES D.C. SOLENOIDES RELES
BIMETALICOS PIEZOACTUADORES ELECTROSTATICOS ELECTROELOHICAL (particulas, viscosidad)
")
162
Señal Análoga

163
Señal Digital

164
LEDs y Fototransistores
Un fototransistor es un transistor que se activa con luz. Cuando se combina con un LED y entre ellos se coloca una rueda ranurada en un sensor de velocidad, un fototransistor puede proveer datos al computador acerca de la velocidad del vehículo. En este tipo de sensor el LED es apuntado al fototransistor. Cuando la rueda ranurada es girada por el cable del velocímetro, rompe el haz de luz. El ECU suministra un voltaje de referencia al colector del fototransistor y el emisor es conectado a tierra. Cada vez que la luz actúa sobre el fototransistor se activa, como si fuese un interruptor de palanca. Cada vez que el fototransistor es encendido, la línea desde el ECU es puesta a tierra y el voltaje se cae a 0 voltios. El ECU puede contar estos pulsos y calcular la velocidad del vehículo.

165
FOTOTRANSISTOR Rueda ranurada Cable de velocimetro led fotoacoplador

166
FOTOTRANSISTORES Este tipo de sensor se usa también como un sensor G o de desaceleración en vehículos con ABS. Este sensor tiene dos LEDs apuntados a dos fototransistores que están separados por una placa ranurada sobre un eje de oscilación. Cuando el vehículo se desacelera, la placa pivota sobre el eje y las ranuras alinean, uno u otro o ambos LEDs y fototransistores dependiendo de la desaceleración. Estas señales son enviadas al computador para determinar el nivel de desaceleración para una correcta operación del ABS

167
Procesos de medida En un proceso puede haber errores: diferencias entre el resultado obtenido y el valor real. La linealidad refleja si hay o no una relación lineal entre el valor real y el medido. La no linealidad es difícil de corregir, y por tanto es un parámetro importante. El offset o desviación cero refleja el valor medido cuando el sensor debería volver a cero. Genera un error pero es más fácil de corregir

168
LVDT Uno de los primeros sensores utilizados para los sistemas de control

169
Sensor capacitivo de silicio

170
Piezoresistivo

171
Interruptores de láminas
Son habitualmente usados como sensores de posición o velocidad. Consisten de un conjunto de contactos que abren, adyacente a un imán. En la aplicación del sensor de velocidad, el magneto es unido a un cable de velocímetro y gira con el cable. Cada vez que uno de los polos pasa, el contacto del interruptor abre o cierra. Un voltaje es suministrado a un contacto del interruptor y el otro contacto es puesto a tierra. Cada vez que el interruptor se cierra, el voltaje es aterrizado a 0 voltios, como el sensor de velocidad de fototransistor.

172
REED SWITCH

173
Piezoelectrico

174
Piezoelectrico

176
Sensor MAF Filtro de aire Sensor De Flujo Camara de aire
Multiple de admision Filtro de aire Cuerpo de aceleración Camara de aire cilindros

177
El actuador Es un mecanismo electromecánico tal como un relé, solenoide o un motor. Un actuador puede ajustar la velocidad de ralentí del motor, cambiar la altura de la suspensión o regular la entrada de combustible al motor.

Presentaciones similares