Descargar la presentación
La descarga está en progreso. Por favor, espere

1
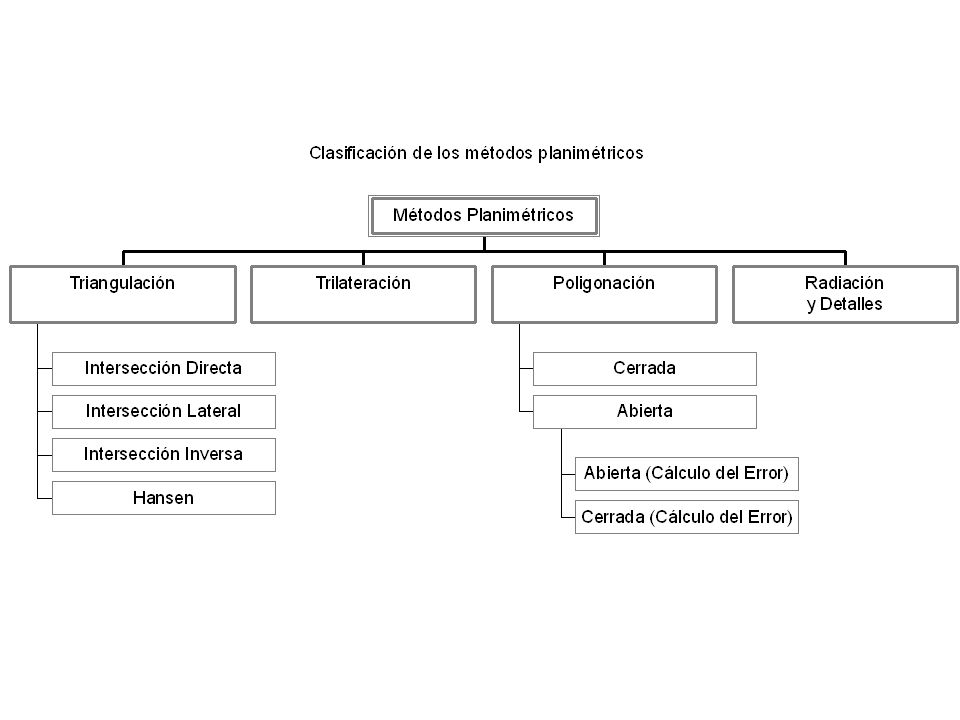
Métodos Planimétricos
Son los métodos que nos permiten conocer la ubicación (coordenadas) de ciertos puntos a partir de otros puntos con coordenadas conocidas y de mediciones que se realicen entre ellos.
 de ciertos puntos a partir de otros puntos con coordenadas conocidas y de mediciones que se realicen entre ellos.")
4
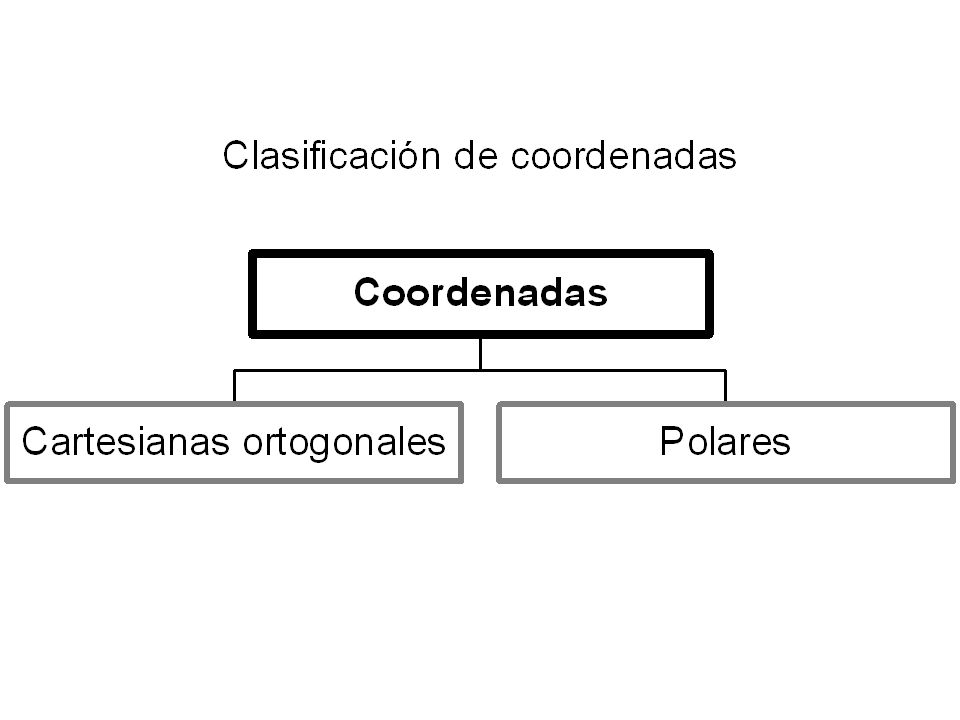
Coordenadas polares X = N P ( ; D) P D Y = E
 P D Y = E")
5
Coordenadas Cartesianas Ortogonales
X Y = N = E P (XP ; YP) P XP YP
 P. XP. YP.")
6
René Descartes (La Haye en Touraine, 1596 – Estocolmo, 1650)
")
7
Radiación Datos: XE ; YE A B C D F G Medición: EA ; EB ; EC ; ED ; EF ; EG ; Az E→A ; Az E→B ; Az E→C ; Az E→D ; Az E→F ; Az E→G E Incógnitas: XA; YA XB ; YB XC ; YC XD ; YD XF ; YF XG ; YG

8
Levantamiento de Detalles por coordenadas rectangulares
B A (Progresiva 0) Distancia al eje Progresiva N Pie de perpendicular
 Distancia al eje. Progresiva. N. Pie de perpendicular.")
9
Cinta de agrimensor

11
Cinta Ruleta

12
Odómetros

13
Jalones

15
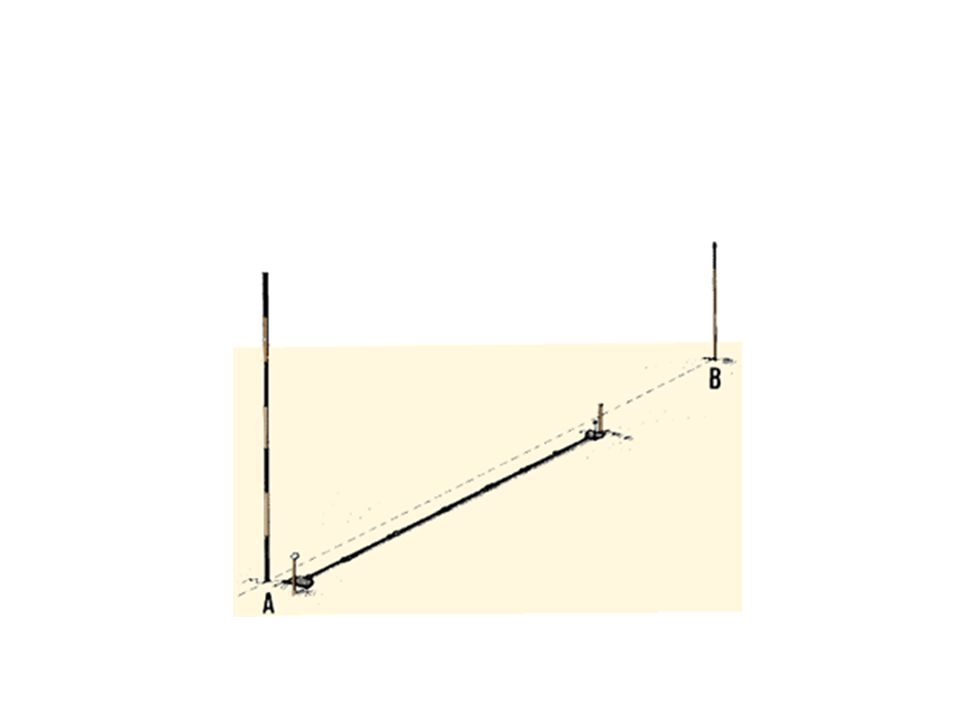
Alineaciones Consiste en materializar una línea recta en el terreno Se utilizan jalones

16
Alineación desde el extremo (Prolongación)
(Un operario) A B C
 A. B. C.")
17
Alineación desde el extremo (Relleno)
(Dos operarios) A B
 A. B.")
18
Pentaprisma doble

19
J J P

20
J P J

21
J P J

22
Distancia al eje Progresiva J P J

24
Reducción de la distancia original (50m) por presencia de obstáculo
 por presencia de obstáculo")
25
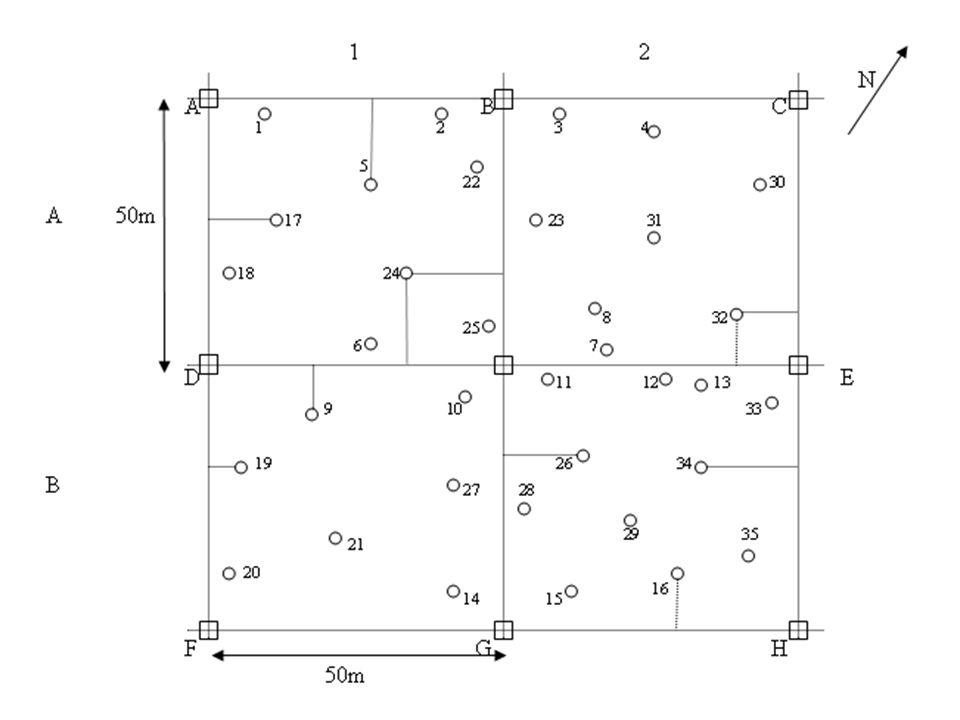
Utilización de hoja cuadriculada para facilitar el cálculo
de la posición de los ejemplares

26
Ubicación de estacas perdidas a partir de otras estacas

27
Utilización de diagonales como ejes de levantamiento

28
Ubicación de ejemplares faltantes a partir de elementos ya levantados

30
TEODOLITO ELECTRONICO
Estación Total Se denomina estación total a un instrumento topográfico electro-óptico cuyo funcionamiento se apoya en la tecnología electrónica. Este instrumento consiste en la incorporación de un distanciómetro y un microprocesador a un teodolito electrónico. MICROPROCESADOR ESTACION TOTAL TEODOLITO ELECTRONICO DISTANCIOMETRO

31
TEODOLITO ELECTRÓNICO
DISTANCIOMETRO Dispositivo electrónico para medición de distancias, funciona emitiendo un haz luminoso ya sea infrarrojo o láser, este rebota en un prisma o directamente sobre la superficie, y dependiendo de el tiempo que tarda el haz en recorrer la distancia es como determina esta. MICROPROCESADOR circuito integrado que contiene todos los elementos necesarios para conformar una "unidad central de procesamiento" UCP, también es conocido como CPU (por sus siglas en inglés: Central Process Unit). En la actualidad este componente electrónico está compuesto por millones de transistores, integrados en una misma placa de silicio. TEODOLITO ELECTRÓNICO es la versión del teodolito óptico, con la incorporación de electrónica para hacer las lecturas del circulo vertical y horizontal, desplegando los ángulos en una pantalla eliminando errores de apreciación, es mas simple en su uso, y por requerir menos piezas es mas simple su fabricación y en algunos casos su calibración
. En la actualidad este componente electrónico está compuesto por millones de transistores, integrados en una misma placa de silicio. TEODOLITO ELECTRÓNICO. es la versión del teodolito óptico, con la incorporación de electrónica para hacer las lecturas del circulo vertical y horizontal, desplegando los ángulos en una pantalla eliminando errores de apreciación, es mas simple en su uso, y por requerir menos piezas es mas simple su fabricación y en algunos casos su calibración.")
32
Concepto de Estación Total
Algunas de las características que incorpora, y con las cuales no cuentan los teodolitos, son una pantalla alfanumérica de cristal líquido (LCD), leds de avisos, iluminación independiente de la luz solar, calculadora, distanciómetro, trackeador (seguidor de trayectoria) y la posibilidad de guardar información en formato electrónico, lo cual permite utilizarla posteriormente en ordenadores personales. Vienen provistas de diversos programas sencillos que permiten, entre otras capacidades, el cálculo de coordenadas en campo, replanteo de puntos de manera sencilla y éficaz y cálculo de acimutes y distancias
, leds de avisos, iluminación independiente de la luz solar, calculadora, distanciómetro, trackeador (seguidor de trayectoria) y la posibilidad de guardar información en formato electrónico, lo cual permite utilizarla posteriormente en ordenadores personales. Vienen provistas de diversos programas sencillos que permiten, entre otras capacidades, el cálculo de coordenadas en campo, replanteo de puntos de manera sencilla y éficaz y cálculo de acimutes y distancias.")
33
Funcionamiento Vista como un teodolito se compone de las mismas partes y funciones que él. El estacionamiento y verticalización son idénticos aunque, para este último se cuenta con niveles electrónicos que facilitan la tarea. Los tres ejes y sus errores asociados también están presentes: el de verticalidad, que con la doble compensación ve reducida su influencia sobre las lecturas horizontales, y los de colimación e inclinación, con el mismo comportamiento que en un teodolito clásico, salvo que el primero puede ser corregido por software, mientras que en el segundo la corrección debe realizarse por métodos mecánicos. El instrumento realiza la medición de ángulos a partir de marcas realizadas en discos transparentes. Las lecturas de distancia se realizan mediante una onda electromagnética portadora con distintas frecuencias que rebota en un prisma ubicado en el punto y regresa tomando, el instrumento, el defasaje entre las ondas. Algunas estaciones totáles presenta la capacidad de medir a sólido, lo que significa que no es necesario un prisma reflectante.

34
Funcionamiento Este instrumento permite la obtención de coordenadas de puntos respecto a un sistema local y/o arbitrario, como también a sistemas definidos y materializados. Para la obtención de estas coordenadas el instrumento realiza una serie de lecturas y cálculos sobre ellas y demás datos suministrados por el operador. Las lecturas que se obtienen con este instrumento son las de ángulos verticales, horizontales y distancias, utilizando en esta ultima Otra particularidad de este instrumento es la posibilidad de incorporarle datos como coordenadas de puntos, códigos, correcciones de presión y temperatura, etc. La precisión de las medidas es del orden de la diezmilésima de gonio en ángulo y de milímetros en distancias, pudiendo realizar medidas en puntos situados entre 2 y 5 kilómetros según el aparato.

35
Partes Nomenclatura y Funciones
Colimador Marca Central del Instrumento Lente del Objetivo Perno del Ajuste Horizontal Plomada Optica Tornillo del Mov. Tangencial Horizontal Pantalla LCD Perno del Movimiento Horizontal Inferior Tribach

36
Nomenclatura y Funciones
Partes Nomenclatura y Funciones Nomenclatura y Funciones Tornillos de Manija Enfoque Telescopico Batería Ocular del Telescopico Nivel Tubular Tornillo Tangencial Teclas de Función Nivel Circular Tornillo Nivelante

39
Navegadores Tipo GARMIN
PAGE -Pulsar para ir pasando las páginas principales -Escape (en algunas opciones) POWER -Mantener pulsada para conectar/desconectar la unidad -Pulsar y soltar para encender/apagar la luz de fondo 39
 POWER. -Mantener pulsada para conectar/desconectar la unidad. -Pulsar y soltar para encender/apagar la luz de fondo. 39.")
40
ZOOM IN/OUT -Mantener pulsada para realizar los zoom de aumento o disminución -Mantener pulsada en la página de satélites para configurar el contraste FIND Pulsar y soltar para acceder al menú buscar 40

41
CLICK STICK (Cursor-Click)
- Mover arriba-abajo derecha-izquierda para desplazarse por la lista - Pulsar y soltar para introducir las opciones seleccionadas y confirmar los mensajes. - Mantener pulsada para marcar la posición en curso como waypoint. (cinco posiciones) 41
 41.")
42
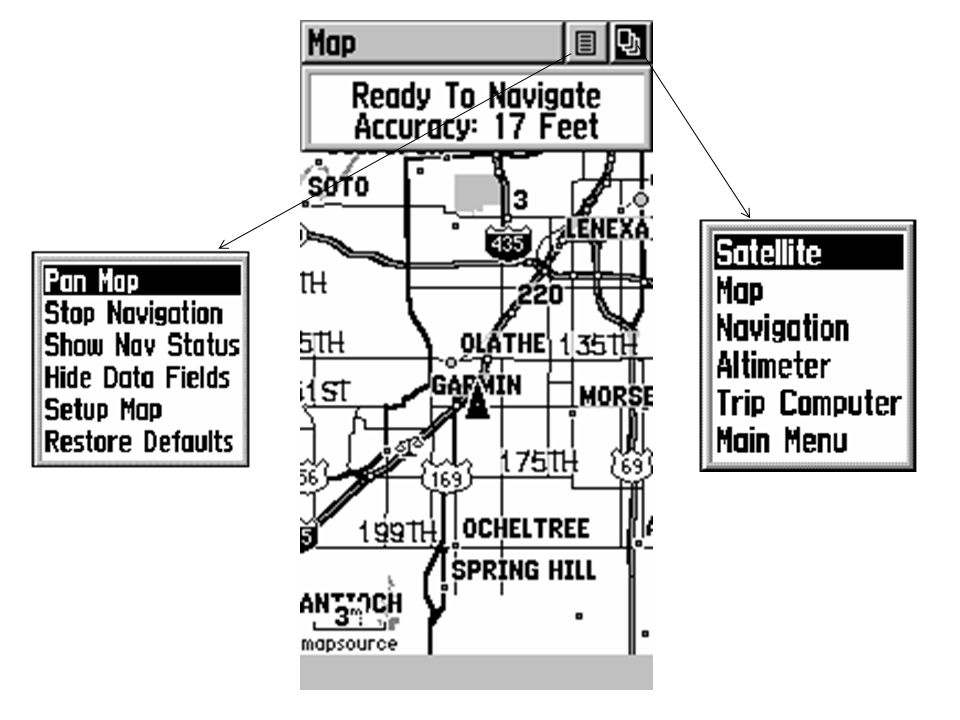
Secuencia de páginas (pantallas)
Página de Satélites Página de Mapa Página de Navegación Página de Altímetro Página de Trayecto Menú Principal

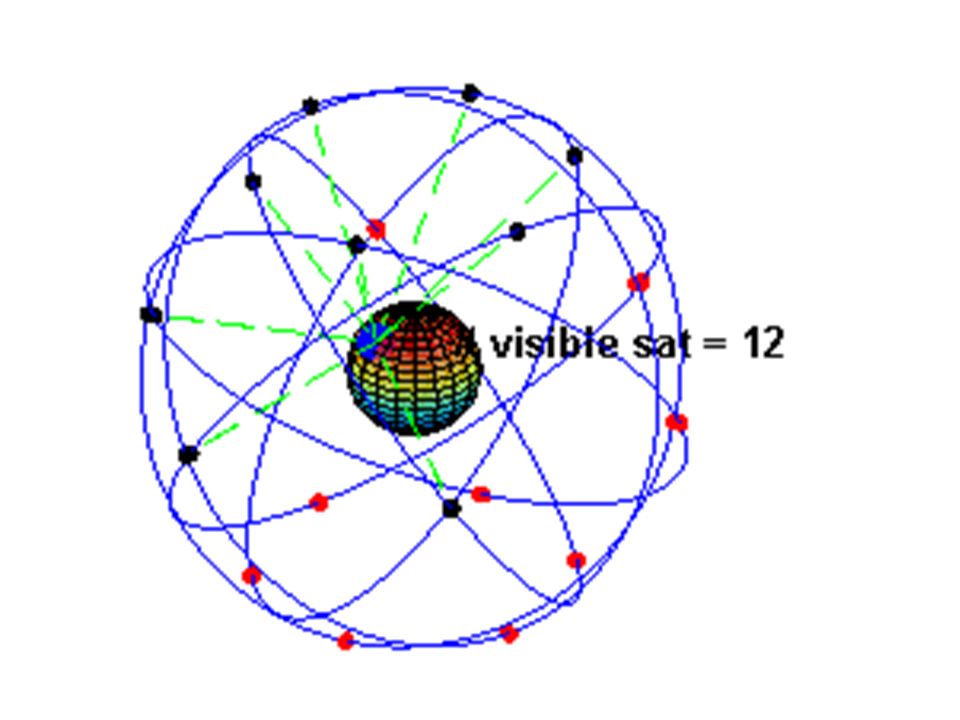
44
Página de Satélites Mensaje de estado del GPS Intensidad de señal
Posición

45
Página de Mapa Menú de Opciones y de Página en pantalla
Ventana de estado Icono de posición Escala de mapa

46
Escalas y descripciones
Zoom en Página de Mapa Zoom Out Zoom In Escalas y descripciones

47
Distancia en línea recta
Página de Navegación Nombre del waypoint de destino Distancia en línea recta hasta el destino Tiempo hasta el destino Puntero de rumbo Anilla de compás Campos de datos seleccionables

48
Página de Altímetro (Vista) Ventana de estado de la altura
Gráfica de la altura Las escalas de zoom permiten seleccionar la escala de medida en el tiempo y distancia

49
Página de Trayecto Menú de opciones de la página de altímetro Reset
Números Grandes (5 campos) Restaurar valores Menú de opciones de Reset En todos los Campos se pueden Seleccionar los datos
 Restaurar valores. Menú de opciones de Reset. En todos los Campos se pueden Seleccionar los datos.")
50
Menú Principal

51
Configuraciones Menú principal Menú de Ajustes

52
Configuraciones Menú de Ajustes Ajuste de hora Ajuste de unidades

53
Configuraciones Ajuste de unidades Formatos de posición
Selección del Datum

54
Campo de datos programable con opciones de lista
Página de Mapa Opciones de lista Rumbo (Bearing): Dirección desde la localización hacia el destino Curso (Course): Dirección desde el inicio hasta el destino Dirección (Heading): Dirección de desplazamiento Desvío del curso: Desvío hacia la derecha o izquierda del curso original Hacia el curso: Dirección del compás a seguir para volver al curso Giro: Ángulo entre el rumbo hacia el destino y la línea de trayecto en curso. L es giro a la izquierda y R giro hacia la derecha Puntero: Indica la dirección al siguiente destino Altura: metros por encima del nivel del mar Campo de datos programable con opciones de lista Dos campos de datos programables
: Dirección desde la localización hacia el destino. Curso (Course): Dirección desde el inicio hasta el destino. Dirección (Heading): Dirección de desplazamiento. Desvío del curso: Desvío hacia la derecha o izquierda del curso original. Hacia el curso: Dirección del compás a seguir para volver al curso. Giro: Ángulo entre el rumbo hacia el destino y la línea de trayecto en curso. L es giro a la izquierda y R giro hacia la derecha. Puntero: Indica la dirección al siguiente destino. Altura: metros por encima del nivel del mar. Campo de datos programable con opciones de lista. Dos campos de datos. programables.")
55
Campo de datos programable con opciones de lista
Página de Mapa Opciones de lista Destino en curso: Siguiente waypoint de la ruta Distancia en curso: Distancia hasta el siguiente waypoint ETA en curso: (Estimated Time of Arrival) Hora estimada de llegada al siguiente waypoint ETE en curso: (Estimated Time Enroute, Estimated Time Elapsed) Tiempo aproximado necesitado para llegar al siguiente waypoint Destino Final: Último waypoint de la ruta. Distancia Final: Distancia que queda al destino final ETA final: Hora estimada a la que se llegará al destino final ETE final: Tiempo estimado para llegar al destino final Velocidad/Velocidad corregida: en millas/hora, km/hora, millas náuticas/hora Salida del sol/Puesta del sol : Hora del día a la que sale/se pone el sol Hora: hora para la zona horaria seleccionada Cuentakilómetros de trayecto: Distancia recorrida acumulada Campo de datos programable con opciones de lista
 Hora estimada de llegada al siguiente waypoint. ETE en curso: (Estimated Time Enroute, Estimated Time Elapsed) Tiempo aproximado necesitado para llegar al siguiente waypoint. Destino Final: Último waypoint de la ruta. Distancia Final: Distancia que queda al destino final. ETA final: Hora estimada a la que se llegará al destino final. ETE final: Tiempo estimado para llegar al destino final. Velocidad/Velocidad corregida: en millas/hora, km/hora, millas náuticas/hora. Salida del sol/Puesta del sol : Hora del día a la que sale/se pone el sol. Hora: hora para la zona horaria seleccionada. Cuentakilómetros de trayecto: Distancia recorrida acumulada. Campo de datos programable con opciones de lista.")
56
Página de Navegación (inactivo)
")
57
Puntero de curso y escala de indicador de desviación de curso
Página de Navegación Puntero de curso y escala de indicador de desviación de curso

58
Página de Navegación Compás electrónico con Sight’N Go activo
Opción de “números grandes” de la Página de navegación

59
Menú Principal

60
Menú Principal

61
Marcar y editar un Waypoint
Edición del Waypoint

62
Crear un Waypoint Crear un waypoint con la flecha de pan
Crear un waypoint en el mapa sin seleccionar un punto Crear un waypoint introduciendo las coordenadas

63
Buscar Opciones de búsqueda usando la localización en curso
Opción de “más cercano” o “por nombre” Selección del waypoint de la lista Información del waypoint

64
Métodos de navegación Posición actual Destino Goto: Un trazado directo a una localización del mapa (waypoint,ciudad, dirección,...) Track: Un trazado de trayecto previo que se ha guardado en el eTrex Vista. Un track le permite repetir un trazado o volver a su posición de partida con la función TracBack. Comienzo Punto intermedio Lago Final

65
Métodos de navegación Ruta: Un trazado hacia un destino que consiste en una serie de marcas a lo largo del camino (waypoints, ciudades, salidas de autopista, puntos de interés, cruces, etc.). Desplazarse sin Goto, Track o Ruta: Desplazarse sin introducir un destino. La Página de Mapa (Map Page) muestra el desplazamiento en tiempo real con la unidad conectada y recibiendo señales de los satélites.
. Desplazarse sin Goto, Track o Ruta: Desplazarse sin introducir un destino. La Página de Mapa (Map Page) muestra el desplazamiento en tiempo real con la unidad conectada y recibiendo señales de los satélites.")
66
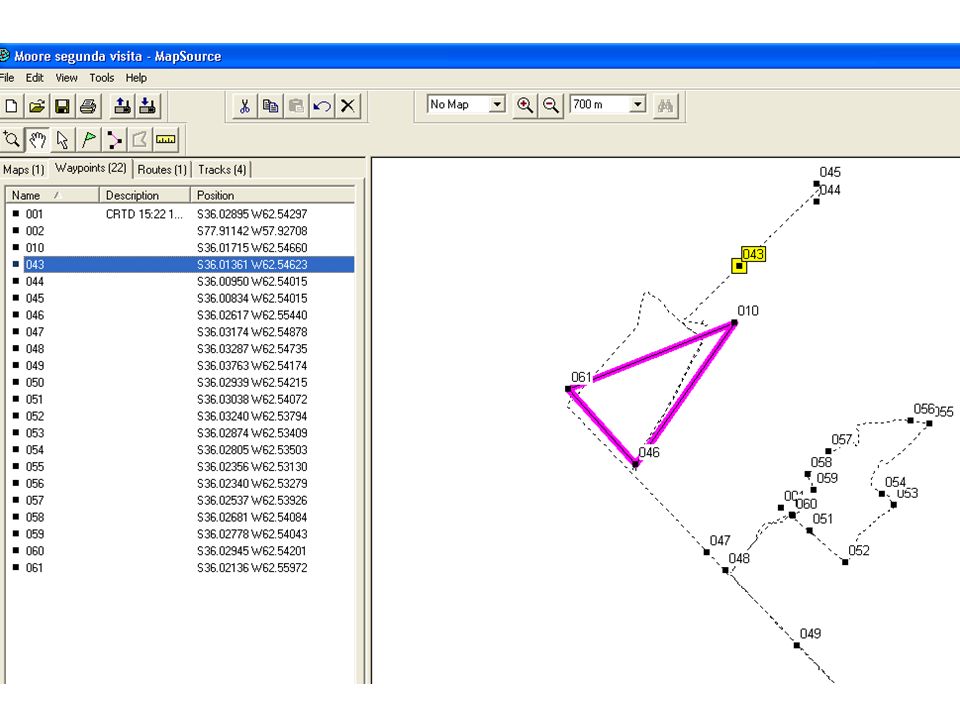
Track en la página de mapa
Navegando un Track Track: un camino definido por un conjunto de puntos Menú Principal Página de Tracks Track en la página de mapa Opciones de Trackback 66

67
Configuración del Track
Tiempo y distancia Se puede ajustar el intervalo o la distancia de frecuencia de toma de puntos Auto: Intervalos. Más a menudo, Normal, Menos a menudo, Lo menos posible Ajustes del Track Opciones de grabación 67

68
Crear una Ruta Ruta: trayectoria definida por un conjunto de waypoint
Menú Principal Página de rutas Ruta con sus waypoints 68

69
(a partir de un recorrido = Track)
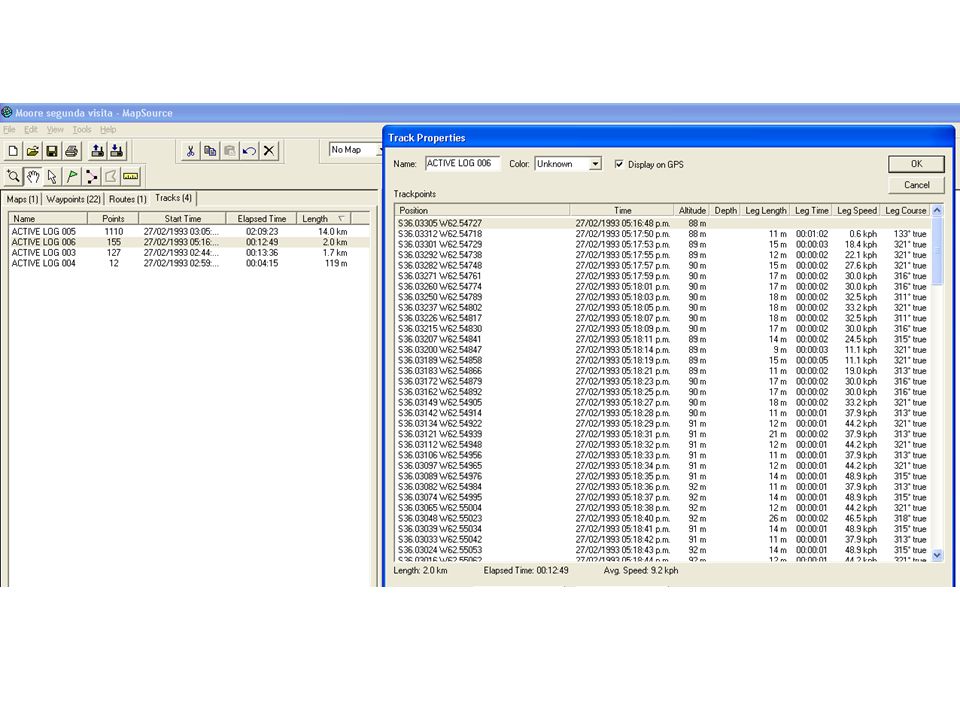
Calculo de Áreas (a partir de un recorrido = Track) -Se utiliza para determinar áreas de lotes irregulares, con lados curvos (lagos, bosques, desperdicios) Cálculo de Áreas Empezar Detener Guardar (como Track, máximo 10) Al abrir el track brinda el perímetro, área (m2, Ha, acres) y muestra el mapa Calc. Area Menú Principal Accesorios Recomendaciones: GPS con buena recepción, no desviarse de la trayectoria 69
 -Se utiliza para determinar áreas de lotes irregulares, con lados curvos (lagos, bosques, desperdicios) Cálculo de Áreas. Empezar. Detener. Guardar (como Track, máximo 10) Al abrir el track brinda el perímetro, área (m2, Ha, acres) y muestra el mapa. Calc. Area. Menú Principal. Accesorios. Recomendaciones: GPS con buena recepción, no desviarse de la trayectoria. 69.")
70
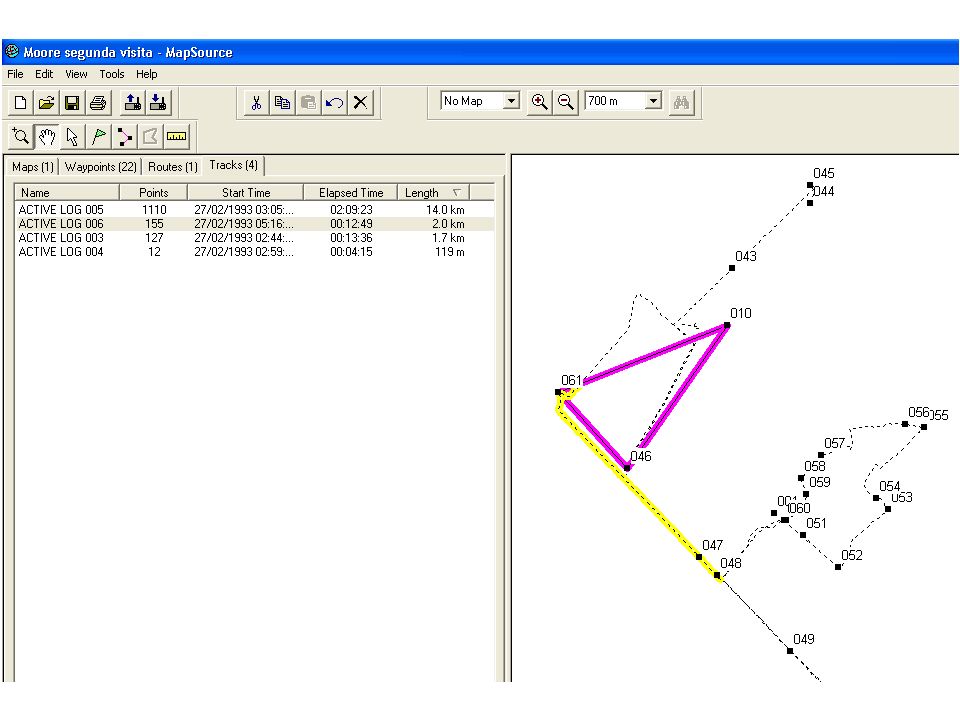
Track obtenido al recorrer el perímetro de una laguna con puntos tomados
cada 10m de distancia

71
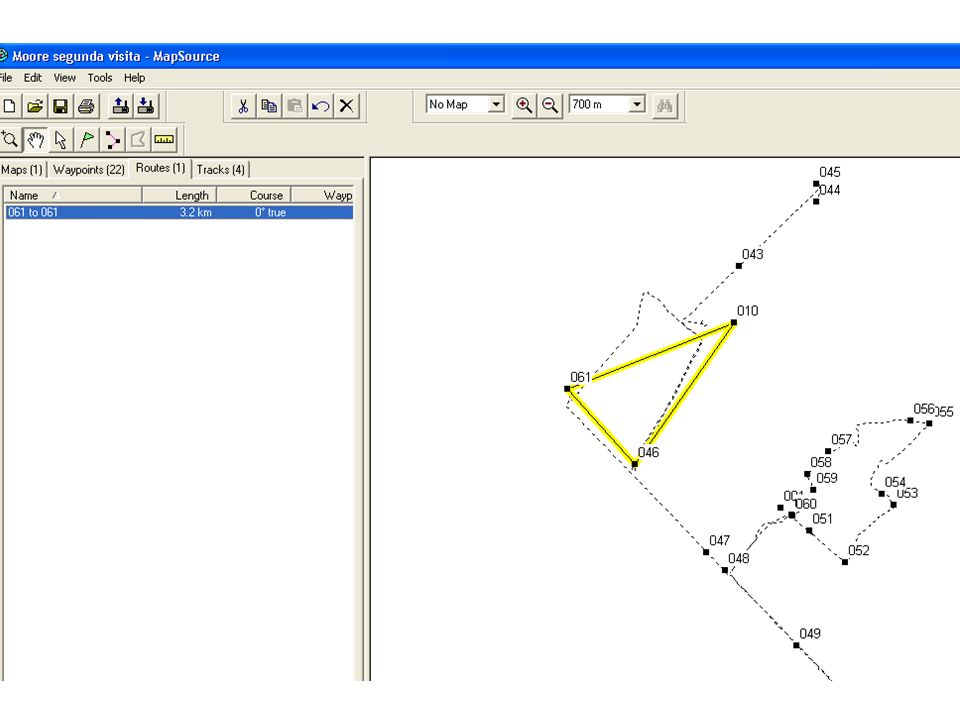
Calculo de Áreas (a partir de una Ruta)
-Se utiliza para determinar áreas de lotes regulares (con lados rectos) -Se toma un waypoint en cada poste esquinero -Se construye una ruta con dichos waypoints Área de ruta Menú Principal Página de rutas Opción Área de rutas Al seleccionar “Área de rutas” muestra el área pudiendo elegirse la unidad (Ha, m2, Ac) 71
 -Se toma un waypoint en cada poste esquinero. -Se construye una ruta con dichos waypoints. Área de ruta. Menú Principal. Página de rutas. Opción Área de rutas. Al seleccionar Área de rutas muestra el área pudiendo elegirse la unidad (Ha, m2, Ac) 71.")
72
waypoints tomados en cada uno de los esquineros
Wp 006 Wp 007 Wp 005 Wp 008 Cálculo del área de un polígono regular (lados rectos) formando una ruta con los 4 waypoints tomados en cada uno de los esquineros
 formando una ruta con los 4. waypoints tomados en cada uno de los esquineros.")
80
Nivelación geométrica
(visuales horizontales sobre miras verticales) De puntos (transporte de cota) Nivelación geométrica De líneas (perfiles) Cuadrícula De areas (niv. areal) Radiación (taquimetría)
 De puntos (transporte de cota) Nivelación. geométrica. De líneas (perfiles) Cuadrícula. De areas (niv. areal) Radiación. (taquimetría)")
81
Mira y Nivel de anteojo

82
Calado del nivel esférico

83
Nivel de anteojo

84
Miras

85
Mira de visual inversa observada a ojo desnudo

86
Mira de visual inversa vista a través del anteojo

87
Hilos del retículo Hilo inferior Hilo superior Hilo medio Hilo vertical

88
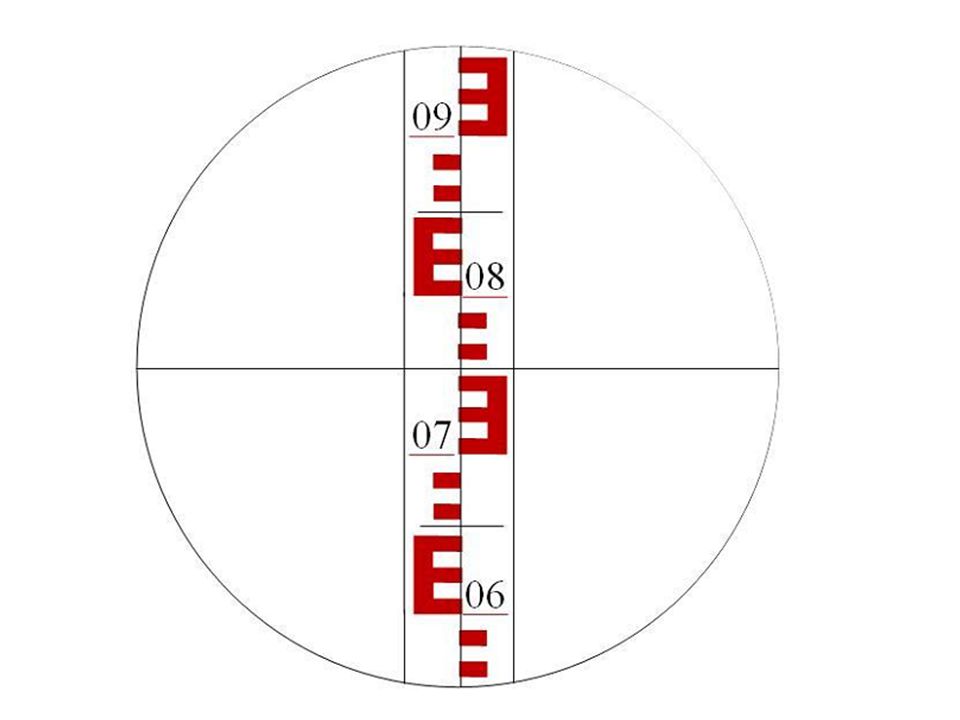
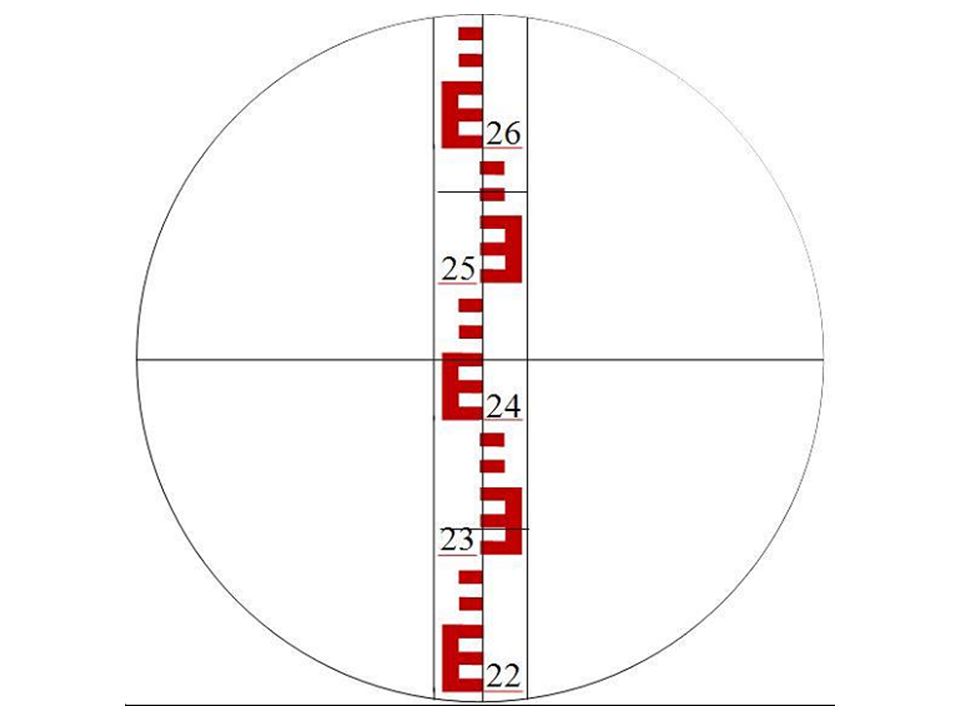
1,3 1,20 1,10 I Lectura de mira. A la derecha tenés representada una parte de una mira. Recordá que los metros enteros se expresan como números romanos mientras que los decímetros con números arábigos. Observá que en cada decímetro tenés una E roja y una E blanca. Cada patita de la E representa 1cm. O sea, una E entera son 5 cm. En el ejemplo, el sentido de lectura es ascendente porque en la simulación vamos a usar un nivel y mira de visual directa (no invierten la imagen). La mira se lee a través del anteojo de un nivel. Observá cómo se ve la mira a través del mismo.
. La mira se lee a través del anteojo de un nivel. Observá cómo se ve la mira a través del mismo.")
89
1,3 1,20 1,10 I

92
CPV = Cota del Plano Visual CPV = ZA + hmA
hmB hmC hmA = 1,45 CPV C B ZA A CPV = Cota del Plano Visual CPV = ZA + hmA ZB = CPV - hmB ZC = CPV - hmC

93
i = altura del instrumento
hmA = 1,45 hmB = 1,25m hmC =1,10m CPV C B ZA = 10m A CPV = ZA + i i = altura del instrumento CPV = 10m + 1,45m = 11,45m ZB = CPV – hmB ZB = 11,45m – 1,25m = 10,20m ZC = CPV – hmC ZB = 11,45m – 1,10m = 10,35m

94
Nivelación areal por cuadrícula
Columna A1 A2 A3 A4 A5 A6 A7 A8 B1 B2 B3 B4 B5 B6 B7 B8 C1 C2 C3 C4 C5 C6 C7 C8 D1 D2 D3 D4 D5 D6 D7 D8 Fila E1 E2 E3 E4 E5 E6 E7 E8 F1 F2 F3 F4 F5 F6 F7 F8 20m G1 G2 G3 G4 G5 G6 G7 G8 20m

95
Nivelación areal por cuadrícula: Instrumental
1. Marcación o estaqueo previo Estacas Cinta Fichas Jalones Escuadra óptica o Limbo del nivel 2. Nivelación Nivel Miras

96
Nivelación areal por cuadrícula: Nivelación
CPV1 = ZPF + hmPF CPV2 = ZA4 + hmA4 ZA1 = CPV1 – hmA1 ZA5 = CPV2 – hmA5 A1 A2 A3 A4 A5 A6 A7 A8 B1 B2 B3 B4 B5 B6 B7 B8 C1 C2 C3 C4 C5 C6 C7 C8 D1 D2 D3 D4 D5 D6 D7 D8 PF Est I Est II E1 E2 E3 E4 E5 E6 E7 E8 F1 F2 F3 F4 F5 F6 F7 F8 G1 G2 G3 G4 G5 G6 G7 G8

97
Nivelación areal por cuadrícula
Representatividad de las estacas A1 A2 A3 A4 A5 A6 A7 A8 25% B1 B2 B3 B4 B5 B6 B7 B8 C1 C2 C3 C4 C5 C6 C7 C8 50% D1 D2 D3 D4 D5 D6 D7 D8 E1 E2 E3 E4 E5 E6 E7 E8 F1 F2 F3 F4 F5 F6 F7 F8 100% G1 G2 G3 G4 G5 G6 G7 G8 25% = A1, A8, G1, G8 50% = A2 a A7, B1, B8, C1, C8, D1, D8, E1, E8, F1, F8, G2 a G7 100% = Resto de las estacas

98
Nivelación areal por cuadrícula: Planilla tipo
Estaca Lectura de hm CPV Cota Punto Punto Fijo 2,22 55,44 53,22 A1 2,18 53,26 A2 2,29 53,15 A3 2,4 53,04 A4 2,45 52,99 A5 2,62 52,82 A6 2,65 52,79 B1 2,09 53,35 B2 2,17 53,27 B3 2,27 53,17 B4 2,39 53,05 B5 2,47 52,97 B6 2,59 52,85 C1 2,02 53,42 C2 2,04 53,4 C3 2,15 53,29 C4 2,26 53,18 C5 2,38 53,06 C6 2,42 53,02

99
Nivelación areal por cuadrícula: Planilla tipo
Estaca Lectura de hm CPV Cota Punto

100
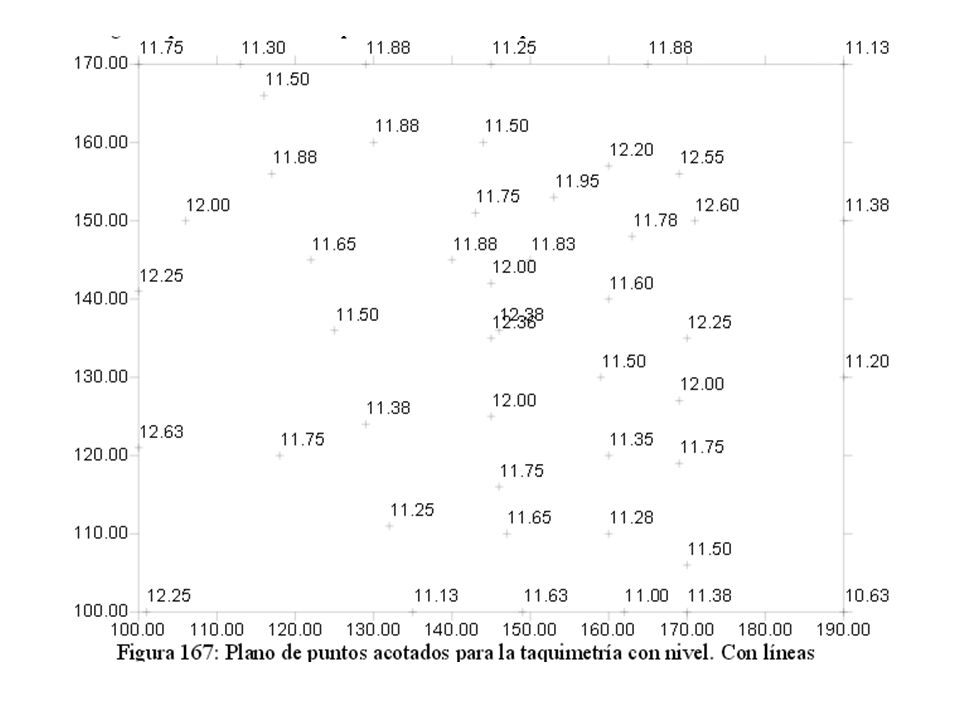
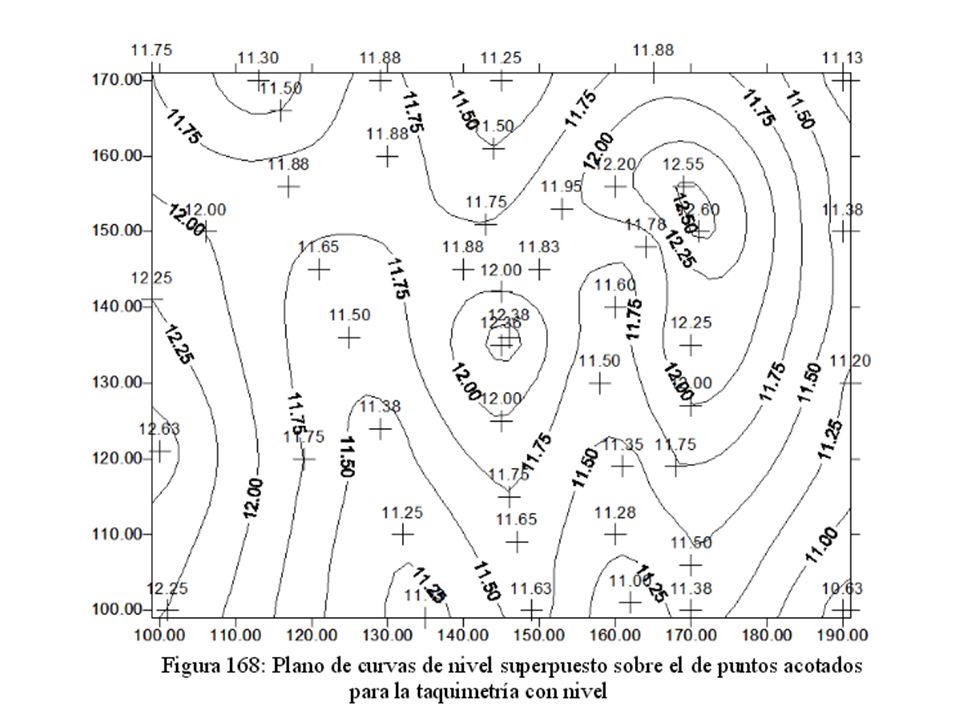
Nivelación areal por radiación: Taquimetría con nivel

101
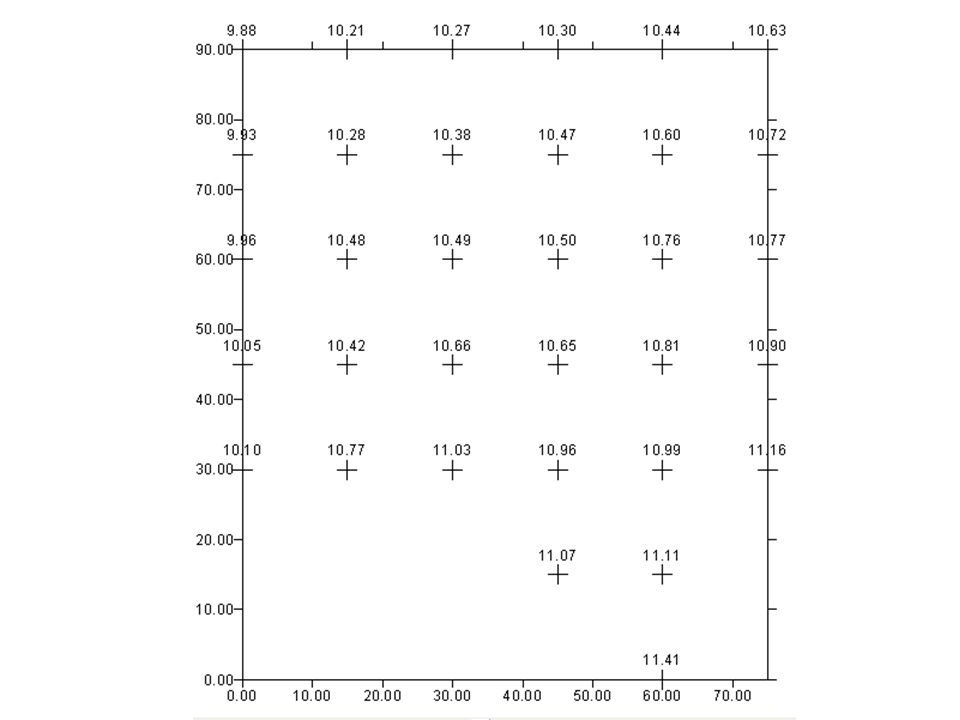
Nivelación areal por radiación: Planilla tipo

Presentaciones similares












 CON REGLA Y COMPÁS>")













