Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Grupo de Ecología Matemática, Instituto de Matemáticas,
‘ Implicaciones del efecto Allee en un modelo de depredación con respuesta funcional sigmoidea’ Alejandro Maximiliano Rojas Palma Eduardo González-Olivares Grupo de Ecología Matemática, Instituto de Matemáticas, Pontificia Universidad Católica de Valparaíso, Casilla 4059, Valparaíso, Chile

2
Introducción Se analizará un modelo de depredación determinista tiempo continuo agregando dos aspectos importantes en un modelo de depredación del tipo Gause: i).- La tasa de consumo o respuesta funcional es del tipo Holling III o sigmoidea. ii).- Se considera el fenómeno llamado efecto Allee en la función de crecimiento de las presas. En una dinámica poblacional, cualquier mecanismo ecológico que establece una relación positiva entre un componente medible de la adaptación individual y la densidad de los conespecíficos puede ser llamado efecto Allee, descompensación o efecto de competición negativa.
.- La tasa de consumo o respuesta funcional es del tipo Holling III o sigmoidea. ii).- Se considera el fenómeno llamado efecto Allee en la función de crecimiento de las presas. En una dinámica poblacional, cualquier mecanismo ecológico que establece una relación positiva entre un componente medible de la adaptación individual y la densidad de los conespecíficos puede ser llamado efecto Allee, descompensación o efecto de competición negativa.")
3
Las poblaciones pueden presentar dinámicas del efecto
Allee debido a fenómenos biológicos tales como : el éxito o fracaso de apareamiento, termorregulación social, reducida defensa antidepredador, alimentación menos eficiente a bajas densidades, reducida eficacia de la vigilancia antidepredador, etc... Matemáticamente, los modelos mas simples para este efecto pueden revelar la aparición de nuevos puntos de equilibrio que cambien la estabilidad estructural del sistema y pueden ocurrir cambios en la estabilidad de otros puntos de equilibrio.

4
dependientes para una sola especie que consideran efecto
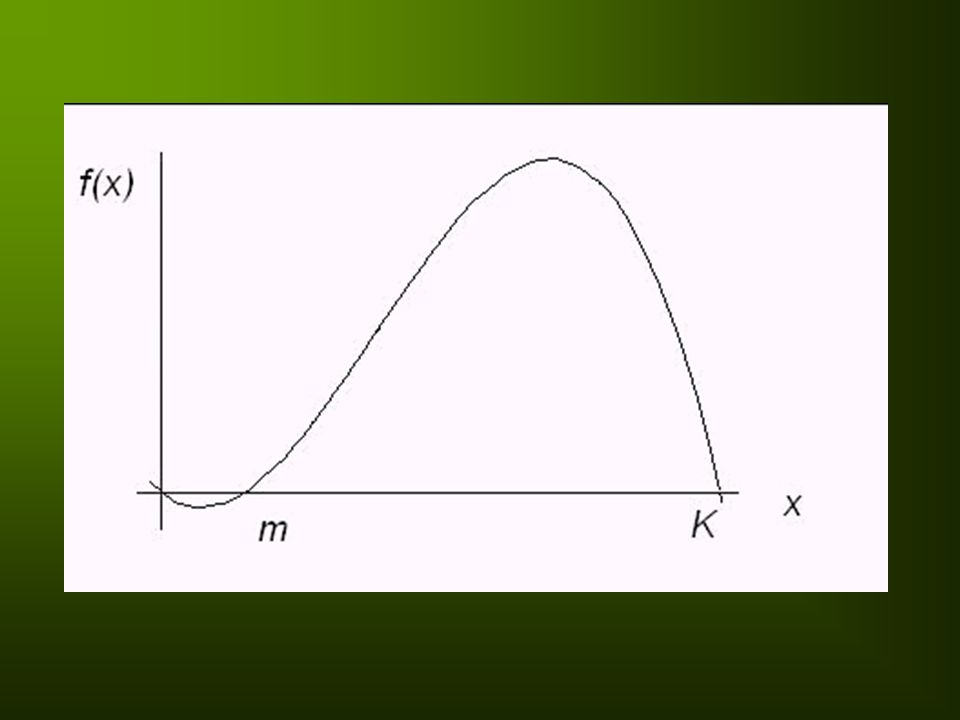
Para algunos autores , los modelos poblacionales denso dependientes para una sola especie que consideran efecto Allee, deben considerar la rapidez de crecimiento de estas poblaciones decrece si el tamaño poblacional está bajo cierto umbral Si es una ecuación que describe este hecho, donde expresa el tamaño de la población , medidos en número de individuos, densidad o biomasa, entonces tiene la forma dada por la siguiente figura:

6
da cuenta del efecto Allee . La función crece a medida que el
En la figura se puede observar que: Si entonces Por lo que es un punto de equilibrio inestable. La función expresa la tasa de crecimiento per capita y da cuenta del efecto Allee . La función crece a medida que el tamaño poblacional crece, desde alcanza un máximo y luego decrece cuando el tamaño poblacional es grande.

7
denominan depensatorias (depensatory) si y
Las funciones con las características dadas se denominan depensatorias (depensatory) si y depensatorias críticas en el caso de El caso indica el colapso de las singularidades y será analizado separadamente. La respuesta funcional de los depredadores, llamada también función de consumo se refiere al cambio en la densidad de las presas atacadas por unidad de tiempo por depredador cuando la densidad de presas cambia.
 si y. depensatorias críticas en el caso de . El caso. indica el colapso de las singularidades y. será analizado separadamente. La respuesta funcional de los depredadores, llamada. también función de consumo se refiere al cambio en la. densidad de las presas atacadas por unidad de tiempo por. depredador cuando la densidad de presas cambia.")
8
Existen otras formas para modelar el efecto Allee
Efecto Allee aditivo tiene la forma siguiente En el modelo se analizará el efecto Allee multiplicativo dado por

9
crece monotónicamente, lo que se puede interpretar como
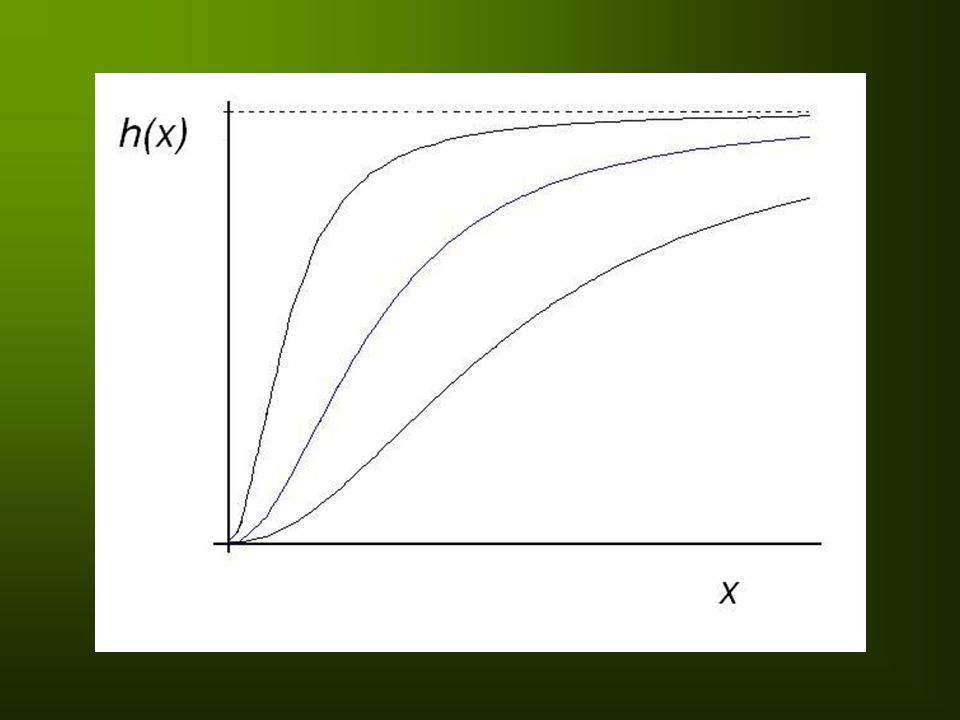
En muchos modelos se asume que la respuesta funcional crece monotónicamente, lo que se puede interpretar como mientras mas presas hay en el medio ambiente es mejor para el depredador En este trabajo la respuesta funcional del depredador es expresada por la función Correspondiente al tipo Holling tipo III que es sigmoidea, representada en la siguiente figura:

11
densidades de población de presas el efecto de la
La función es monótonamente creciente como lo son también las respuestas funcionales Holling tipo II, pero posee además un punto de inflexión. Biológicamente da cuenta del hecho que a bajas densidades de población de presas el efecto de la depredación es bajo, pero a medida que aumenta la densidad de presas, la depredación es mas intensa .

12
El modelo modelo del tipo Gause y es descrito por el sistema
El modelo de depredación analizado, corresponde a un modelo del tipo Gause y es descrito por el sistema bidimensional de ecuaciones diferenciales no lineales, autónomo del tipo Kolmogorov. [1]

13
En el modelo y indican los tamaños
poblacionales (numero de individuos densidad o biomasa) De las presas y depredadores, respectivamente, todos los parámetros son positivos Y por razones biológicas Los parámetros tienen los siguientes significados: es la tasa intrínseca de crecimiento de las presas. es la capacidad de soporte del medio ambiente. es la cantidad mínima de población viable, es el umbral bajo el cual la población de presas tiene una tasa de crecimiento negativo .
 De las presas y depredadores, respectivamente, todos los. parámetros son positivos. Y por razones biológicas. Los parámetros tienen los siguientes significados: es la tasa intrínseca de crecimiento de las presas. es la capacidad de soporte del medio ambiente. es la cantidad mínima de población viable, es el umbral. bajo el cual la población de presas tiene una tasa de. crecimiento negativo .")
14
es la tasa máxima de consumo per capita de los
depredadores (tasa de saciación). es la cantidad de presas para alcanzar la mitad de (tasa de saturación media). es la tasa de muerte intrínseca (natural) del depredador es la eficiencia con que los depredadores convierten las presas consumidas en nuevos nacimientos de depredadores
. es la cantidad de presas para alcanzar la mitad de. (tasa de saturación media). es la tasa de muerte intrínseca (natural) del depredador. es la eficiencia con que los depredadores convierten. las presas consumidas en nuevos nacimientos de. depredadores.")
15
El sistema es del tipo Kolmogorov, porque sus ejes
son conjuntos invariantes del modelo y este corresponde al tipo Gause pues se considera como un modelo físico de transferencia de masas. El sistema está definido en el primer cuadrante, esto es Los puntos de equilibrio del sistema o singularidades de campo son donde está al interior del primer cuadrante , y

16
[1] es topológicamente equivalente a
Para simplificar los cálculos realizamos un cambio de variable y reescalamiento del tiempo, dado por la función Donde Calculando Se tiene que es un difeomorfismo , por lo que el sistema [1] es topológicamente equivalente a
![[1] es topológicamente equivalente a](http://slideplayer.es/slide/3983156/13/images/16/%5B1%5D+es+topol%C3%B3gicamente+equivalente+a.jpg "Para simplificar los cálculos realizamos un cambio de variable y reescalamiento del tiempo, dado por la función. Donde. Calculando. Se tiene que es un difeomorfismo , por lo que el sistema. [1] es topológicamente equivalente a.")
17
sistema polinomial de ecuaciones diferenciales de quinto grado, donde:
[2] sistema polinomial de ecuaciones diferenciales de quinto grado, donde: puesto que, por razones biológicas Además:

18
por lo tanto un único punto de equilibrio al interior del primer
,pues para que exista una única raíz real positiva, y por lo tanto un único punto de equilibrio al interior del primer cuadrante, debe ser mayor que y no pueden ser Iguales ( no está definido si ) Con esto Y el sistema está definido en
 Con esto. Y el sistema está definido en.")
19
son Donde La matriz Jacobiana es Con
Los puntos de equilibrio del sistema reparametrizado son Donde La matriz Jacobiana es Con

20
OBSERVACION Si no se considera efecto Allee, se tiene el sistema Se sabe que La singularidades y son siempre puntos silla para todo valor de parámetros. Existe un único punto de equilibrio positivo que puede ser : 2.1 atractor (nodo o foco) 2.2 repulsor, rodeado de un único ciclo limite.
 2.2 repulsor, rodeado de un único ciclo limite.")
21
Resultados principales
Lema 1 El conjunto Es una región de invarianza del sistema reparametrizado Como el modelo es del tipo Kolmogorov, los ejes son conjuntos invariantes. Sea ,se tiene que Demostración

22
Como ,entonces .Por lo tanto
cualquiera que fuesen las trayectorias de las soluciones todas cruzan la línea Con esto se puede asegurar que toda solución del Sistema está contenida en y por esto es una región de invarianza Como además sabemos que un difeomorfismo preserva los campos de vectores ( hace a los conjuntos Topologicamente equivalentes de forma cualitativa) se puede decir que el sistema original tiene una región de invarianza
 se puede. decir que el sistema original tiene una región de invarianza.")
23
Las soluciones son acotadas
Lema 2 Las soluciones son acotadas Demostración Si en [2] llamamos luego y si por lo que para por lo que es imposible que Nos interesa ver si una solución con condiciones iniciales en el primer cuadrante es acotada en la región donde y Elegimos una constante y un valor inicial con y sobre el máximo de la

24
y . Se desea mostrar que las soluciones
curva Sean las soluciones con y Se desea mostrar que las soluciones cruzan y entran en la región donde y y estas son acotadas. Cualquier otra solución con y también permanecerá acotada , pues por teorema de existencia y unicidad, no puede cruzar la órbita de Tanto como la órbita permanece en la región donde y , la solución permanece sobre la curva de esto obtenemos que

25
Si ahora calculamos donde Luego por lo que con

26
Ahora, sea y definamos Por lo que es una función decreciente y con y de esta última desigualdad se obtiene que luego

27
como estamos en la región donde ,esto quiere decir
que luego y con ello en particular esta desigualdad se cumple en la región donde y Esto quiere decir que para cada valor inicial en la región ya determinada existe una cota, por lo cual no es posible que , luego las soluciones cruzan a la región donde y y permanecen acotadas.

28
Lema 3 Todo punto de equilibrio se sitúa sobre la curva parabólica ii) El punto es atractor para cualquier valor de parámetros demostración i) Como y luego reemplazando nos queda
 Como y. luego. reemplazando nos queda.")
29
Luego ii) Como entonces Por lo tanto es atractor
 Como entonces Por lo tanto es atractor")
30
a.- atractor (nodo hiperbólico) si b.- silla (hiperbólica) si
Lema 4 El punto es: a.- atractor (nodo hiperbólico) si b.- silla (hiperbólica) si c.- atractor (no hiperbólico) si Demostración Como Entonces Cuyo signo depende de
 si. b.- silla (hiperbólica) si. c.- atractor (no hiperbólico) si. Demostración. Como. Entonces. Cuyo signo depende de.")
31
hiperbólico, por el teorema de la variedad central.
a.- Si entonces Luego es atractor b.- Si entonces Luego es silla c.- Si entonces es un atractor no hiperbólico, por el teorema de la variedad central.

32
a.-repulsor (nodo hiperbólico) si b.-silla (hiperbólica) si
Lema 5 El punto es: a.-repulsor (nodo hiperbólico) si b.-silla (hiperbólica) si c.-repulsor (no hiperbólico) si Demostración Como Donde Luego el signo de determinará la naturaleza del punto
 si. b.-silla (hiperbólica) si. c.-repulsor (no hiperbólico) si. Demostración. Como. Donde. Luego el signo de determinará la naturaleza del punto.")
33
a.- Si significa que luego
y es repulsor b.- Si significa que luego y es silla y aplicando el teorema de la variedad central se puede ver que es repulsor no hiperbólico c.- Si significa que esto indica el colapso de los puntos de equilibrio y

34
puntos y respectivamente, entonces existe un
Lema 6 Si y son la variedad estable e inestable de los puntos y respectivamente, entonces existe un subconjunto de valores de parámetros para los cuales y se forma una curva heteroclínica que une los puntos y Demostración Sea y Como en la hipótesis. Ninguno de los de y de tienden a infinito en la dirección del eje ni de está sobre el eje , entonces existen puntos y , con y dependientes de los parametros

35
entonces . Como el campo de vectores
Se puede ver que si entonces y si entonces Como el campo de vectores es continuo con respecto a los valores de parámetros, entonces la variedad estable intersecta a la variedad inestable Existe tal que y la ecuación define una superficie sobre el espacio de parámetros para los cuales la curva heteroclínica existe. Si la naturaleza del punto de equilibrio depende solo de porque es siempre positivo, por lo cual puede ser atractor o repulsor rodeado de un ciclo límite, por el teorema de Poincaré- Bendixon, o será un foco debil en la región .

36
DISCUSION: La existencia de una curva heteroclínica permite la coexistencia de las dos poblaciones puesto que el punto de equilibrio que está al interior de la subregión limitada por esta, es un atractor o bien repulsor, permitiendo la existencia de un cíclo límite. Cuando , el punto es un atractor global que sugiere la extinción de ambas poblaciones. 3) Cuando , el punto y el son atractores locales lo que sugiere la extinción de ambas poblaciones o bien la extinción de los depredadores.
 Cuando , el punto y el son atractores locales lo que sugiere la extinción de ambas poblaciones o bien la extinción de los depredadores.")
37
Perspectivas futuras Considerar una respuesta funcional mas general descrita por la función o bien, cual es el comportamiento del modelo si se considera la función ii) Como cambia la dinámica del sistema si se usa otra forma de representar el efecto Allee
 Como cambia la dinámica del sistema si se usa otra forma de representar el efecto Allee.")
38
Referencias [1] A. A. Andronov, E. A. Leontovich, I. Gordon, A. G. Maier, Qualitative theory of second-order dynamic systems, A Halsted Press Book, John Wiley & Sons, New York, 1973 [2] D. K. Arrowsmith, C. M. Place, Dynamical System. Differential equations, maps and chaotic behaviour, Chapman and Hall, 1992. [3] A. A. Berryman, A. P. Gutierrez, R. Arditi, Credible, parsimonious and useful Predator-Prey Models - A reply to Abrams, Gleeson, and Sarnelle, Ecology 76 (6), (1995) [4] T. R. Blows, N. G. Lloyd, The number of limit cycles of certain polynomial differentialF. Brauer, C. Castillo-Chávez, Mathematical models in Population Biology and Epidemiology, TAM 40, Springer-Verlag, 2001. [5] F.Brauer y C. Castillo Chávez, Mathematical modelling in population biology and epidemiology,TAM 40, Springer-Verlag 2001. [6] E. Sáez, E. González-Olivares, Dynamics on a Predator-prey Model, SIAM Journal of Applied Mathematic 59(5) (1999) [7] H. Meneses-Alcay, E. González-Olivares, Consequences of the Allee effect on Rosenzweig-McArthur predator-prey model, In R. Mondaini (ed.) Proceedings of the Third Brazilian Symposium on Mathematical and Computational Biology, E-papers Serviços Editoriais Ltda., Volumen 2 (2004)
, (1995) [4] T. R. Blows, N. G. Lloyd, The number of limit cycles of certain polynomial differentialF. Brauer, C. Castillo-Chávez, Mathematical models in Population Biology and Epidemiology, TAM 40, Springer-Verlag, [5] F.Brauer y C. Castillo Chávez, Mathematical modelling in population biology and epidemiology,TAM 40, Springer-Verlag [6] E. Sáez, E. González-Olivares, Dynamics on a Predator-prey Model, SIAM Journal of Applied Mathematic 59(5) (1999) [7] H. Meneses-Alcay, E. González-Olivares, Consequences of the Allee effect on Rosenzweig-McArthur predator-prey model, In R. Mondaini (ed.) Proceedings of the Third Brazilian Symposium on Mathematical and Computational Biology, E-papers Serviços Editoriais Ltda., Volumen 2 (2004)")
39
Muchas Gracias Agradecimientos:
Se agradece al grupo de ecología matemática del instituto de matemáticas de la PUCV por sus valiosos comentarios y Sugerencias. Se agradece también a los organizadores del BIOMAT VI, por el espacio y la buena disposición. Muchas Gracias

Presentaciones similares