Descargar la presentación
La descarga está en progreso. Por favor, espere

1
7. Sistemas autónomos planos
(© Chema Madoz, VEGAP, Madrid 2009) 1
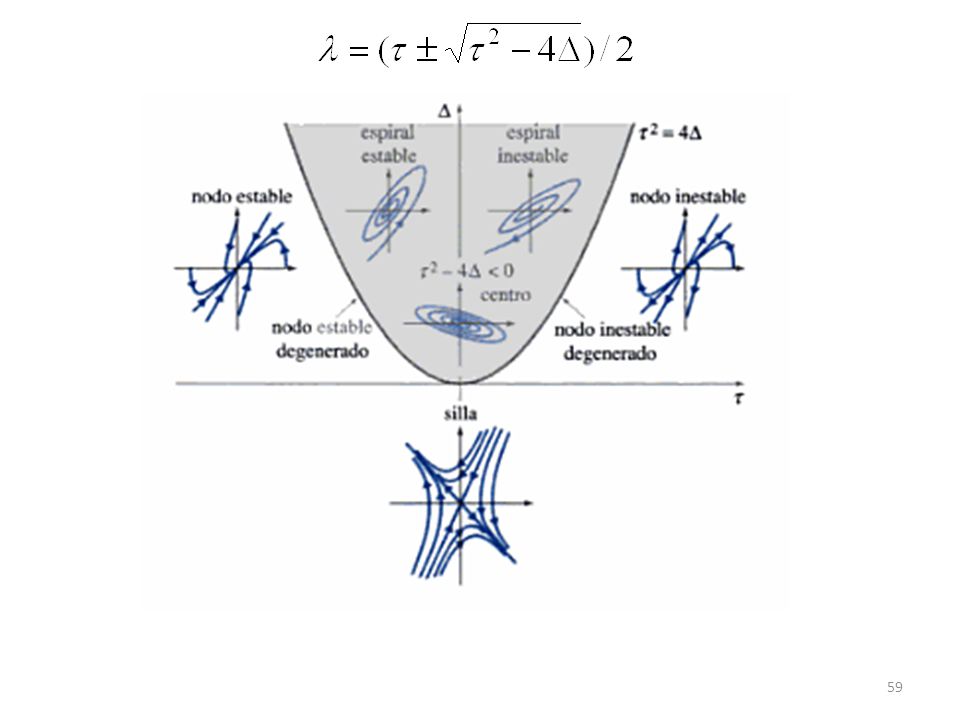
 1.")
2
Podemos estudiar EDOs de primer orden
Curvas solución "sin una solución" Podemos estudiar EDOs de primer orden analizándolas cualitativamente. dy/dx = 0.2 xy = f(x, y) (a) Pendientes: Debido a que la solución y(x) de dy/dx = f(x,y) es necesariamente una función diferenciable en I, también es continua. Así, la derivada dy/dx= f(x,y) proporciona las pendientes de las rectas tangentes a las curvas solución en los puntos (x,y). (b) Elementos lineales: Suponemos que dy/dx = f(x, y(x)). El valor f(x, y) representa la pendiente de una recta, o un segmento de recta que llamaremos elemento lineal. 2
 (a) Pendientes: Debido a que la solución y(x) de. dy/dx = f(x,y) es necesariamente una función diferenciable en I, también es continua. Así, la derivada dy/dx= f(x,y) proporciona las pendientes de las rectas tangentes a las curvas solución en los puntos (x,y). (b) Elementos lineales: Suponemos que. dy/dx = f(x, y(x)). El valor f(x, y) representa la pendiente de una recta, o un segmento de recta que llamaremos elemento lineal. 2.")
3
Campo de direcciones Si para la EDO dy/dx = f(x, y) se evalúa f en una red o malla de puntos rectangular en el plano xy, y se dibuja un elemento lineal en cada nodo (x, y) de la malla con pendiente f(x, y), obtenemos el campo de direcciones o campo de pendientes.
 se evalúa f en una red o malla de puntos rectangular en el plano xy, y se dibuja un elemento lineal en cada nodo (x, y) de la malla con pendiente f(x, y), obtenemos el campo de direcciones o campo de pendientes.")
4
Ejemplo: El campo de direcciones de dy/dx = 0
Ejemplo: El campo de direcciones de dy/dx = 0.2 xy está representado en la figura (a). Compárese con la figura (b) donde se han representado unas curvas de la familia de soluciones.
. Compárese con la figura (b) donde se han representado unas curvas de la familia de soluciones.")
5
Ejemplo: Use un campo de direcciones para dibujar una curva solución aproximada para dy/dx = sen y, con y(0) = −3/2. Solución: Apelando a la continuidad de f(x, y) = sen y y f/y = cos y, el teorema de existencia y unicidad garantiza la existencia de una única curva solución que pasa por algún punto especificado en el plano. Ahora dividimos la región que contiene a (-3/2, 0) en una malla rectangular. Calculamos el elemento lineal de cada nodo para obtener la siguiente figura:
 = sen y y f/y = cos y, el teorema de existencia y unicidad garantiza la existencia de una única curva solución que pasa por algún punto especificado en el plano. Ahora dividimos la región que contiene a (-3/2, 0) en una malla rectangular. Calculamos el elemento lineal de cada nodo para obtener la siguiente figura:")
6
EDs de primer orden autónomas
dy/dx = f(y) Una EDO en la que la variable independiente no aparece de manera explícita es autónoma. Nota: Recordemos que si dy/dx > 0 para todo x de I, entonces y(x) es creciente en I. Y si dy/dx < 0 para todo x de I, entonces y(x) es decreciente en I.
 Una EDO en la que la variable independiente no aparece de manera explícita es autónoma. Nota: Recordemos que si dy/dx > 0 para todo x de I, entonces y(x) es creciente en I. Y si dy/dx < 0 para todo x de I, entonces y(x) es decreciente en I.")
7
Puntos críticos Los ceros de f en la EDO autónoma dy/dx = f(y) son puntos especialmente importantes. Si f(c) = 0, c es un punto crítico, punto de equilibrio o punto estacionario. Si sustituimos y(x) = c en dy/dx = f(y), obtenemos 0 = 0, de modo que si c es un punto crítico, entonces y(x) = c es una solución de dy/dx = f(y). Una solución y(x) = c constante, se llama solución de equilibrio. Los equilibrios son las únicas soluciones constantes de dy/dx = f(y).
 = 0, c es un punto crítico, punto de equilibrio o punto estacionario. Si sustituimos y(x) = c en dy/dx = f(y), obtenemos 0 = 0, de modo que si c es un punto crítico, entonces y(x) = c es una solución de dy/dx = f(y). Una solución y(x) = c constante, se llama solución de equilibrio. Los equilibrios son las únicas soluciones constantes de dy/dx = f(y).")
8
Ejemplo: La siguiente ED, dP/dt = P (a – bP)
donde a y b son constantes positivas, es autónoma. De f(P) = P (a – bP) = 0, obtenemos las soluciones de equilibrio: P(t) = 0 y P(t) = a/b. Colocamos los puntos críticos en una recta vertical (recta fase), que la divide en tres intervalos. Las flechas en la figura indican el signo algebraico de f(P) = P (a – bP) en ese intervalo. Si el signo es positivo o negativo, entonces P es creciente o decreciente en este intervalo.
 = P (a – bP) = 0, obtenemos las soluciones de equilibrio: P(t) = 0 y P(t) = a/b. Colocamos los puntos críticos en una recta vertical (recta fase), que la divide en tres intervalos. Las flechas en la figura indican el signo algebraico de f(P) = P (a – bP) en ese intervalo. Si el signo es positivo o negativo, entonces P es creciente o decreciente en este intervalo.")
9
Curvas solución Si garantizamos la existencia y unicidad de la EDO autónoma dy/dx = f(y), (f y f’ son continuas en un intervalo I), por cada punto (x0, y0) en R, pasa una sola curva solución.
, (f y f’ son continuas en un intervalo I), por cada punto (x0, y0) en R, pasa una sola curva solución.")
10
Supongamos que la EDO autónoma presenta dos puntos críticos, c1, y c2, tales que c1 < c2. Las gráficas de las soluciones de equilibrio y(x) = c1, y(x) = c2 son rectas horizontales y dividen R en tres regiones, a los que podemos llamar R1, R2 y R3 como en la figura.
 = c1, y(x) = c2 son rectas horizontales y dividen R en tres regiones, a los que podemos llamar R1, R2 y R3 como en la figura..")
11
(1) Si (x0, y0) está en Ri, i = 1, 2, 3, una solución y(x) que pasa por (x0, y0), permanecerá en la misma subregión. (2) Por continuidad de f , f(y) es mayor o menor que cero y no puede cambiar de signo en una subregión. (3) Como dy/dx = f(y(x)) es o positiva o negativa en Ri, cualquier solución y(x) es monótona en Ri. (4) Si y(x) está acotada superiormente por c1, (y(x) < c1), la gráfica de y(x) se aproximará a la solución de equilibrio y(x) = c1 cuando x o x -. Si está acotada c1 < y(x) < c2, se aproximará a y(x) = c1 e y(x) = c2. cuando x o x -. Y por último, si está acotada inferiormente, c2 < y(x) , se aproximará a y(x) = c2 cuando x o x -. .
 Por continuidad de f , f(y) es mayor o menor que cero y no puede cambiar de signo en una subregión. (3) Como dy/dx = f(y(x)) es o positiva o negativa en Ri, cualquier solución y(x) es monótona en Ri. (4) Si y(x) está acotada superiormente por c1, (y(x) < c1), la gráfica de y(x) se aproximará a la solución de equilibrio y(x) = c1 cuando x o x -. Si está acotada c1 < y(x) < c2, se aproximará a y(x) = c1 e y(x) = c2. cuando x o x -. Y por último, si está acotada inferiormente, c2 < y(x) , se aproximará a y(x) = c2 cuando x o x -. .")
12
En el ejemplo dP/dt = P (a – bP):
P = 0 y P = a/b son dos puntos críticos, por tanto tenemos tres intervalos para P: R1 : (-, 0) R2 : (0, a/b) R3 : (a/b, ) Sea P(0) = P0. Cuando una solución pasa por P0, tenemos tres tipos de curvas solución dependiendo del intervalo al que pertenece P0.
 R2 : (0, a/b) R3 : (a/b, ) Sea P(0) = P0. Cuando una solución pasa por P0, tenemos tres tipos de curvas solución dependiendo del intervalo al que pertenece P0.")
13
La ED dy/dx = (y – 1)2 tiene un único punto crítico y = 1
La ED dy/dx = (y – 1)2 tiene un único punto crítico y = 1. Desde la gráfica, llegamos a la conclusión de que una solución y(x) es creciente en - < y < 1 y 1 < y < , donde - < x < .
2 tiene un único punto crítico y = 1. Desde la gráfica, llegamos a la conclusión de que una solución y(x) es creciente en. - < y < 1 y 1 < y < , donde - < x < .")
14
Atractores y repulsores: hay tres tipos de comportamiento que y(x) puede exhibir en las cercanías de un punto crítico c. (a) Cuando ambas flechas apuntan a c, y(x) se aproximará a c. Este tipo de punto crítico se denomina asintóticamente estable. El punto c se denomina atractor. (b) Cuando ambas flechas no apuntan a c, y(x) se alejará de c. Este tipo de punto crítico se denomina inestable. El punto c se denomina repulsor o repulsivo. (c) y (d) Cuando y0 a un lado de c es atraído por c y repelido por el otro lado. Este tipo de puntos críticos se denomina semiestables.
 Cuando ambas flechas apuntan a c, y(x) se aproximará a c. Este tipo de punto crítico se denomina asintóticamente estable. El punto c se denomina atractor. (b) Cuando ambas flechas no apuntan a c, y(x) se alejará de c. Este tipo de punto crítico se denomina inestable. El punto c se denomina repulsor o repulsivo. (c) y (d) Cuando y0 a un lado de c es atraído por c y repelido por el otro lado. Este tipo de puntos críticos se denomina semiestables.")
15
EDO autónomas y campos de direcciones
La figura muestra el campo de direcciones de dy/dx = 2y – 2. Podemos observar que los elementos lineales que pasan por los puntos de cualquier recta horizontal mantienen la pendiente. Recordemos que una EDO autónoma es de la forma dy/dx = f(y), y las pendientes sólo dependen de y.
, y las pendientes sólo dependen de y.")
16
Sistemas autónomos Un sistema de ecuaciones diferenciales de primer orden se llama autónomo, cuando puede escribirse como: La variable independiente t no aparece explícitamente en el lado derecho. Ejemplo: Este sistema no es autónomo, debido a la presencia de t en el lado derecho.

17
Ecuación diferencial no lineal de segundo
orden que describe el ángulo de desplazamiento de un péndulo. Si hacemos x = e y = , entonces la ecuación diferencial de segundo orden se puede escribir como un sistema autónomo de dos ecuaciones de primer orden: Nota: Cualquier EDO de segundo orden x'' = g(x,x') se puede escribir como un sistema autónomo. Haciendo y = x', tenemos que x'' = g(x,x') se transforma en y' = g(x,x'). Y la ec. de segundo orden se transforma en el sistema autónomo: x' = y; y' = g(x,y)
 se puede escribir como un. sistema autónomo. Haciendo y = x , tenemos que x = g(x,x ) se transforma en. y = g(x,x ). Y la ec. de segundo orden se transforma en el sistema autónomo: x = y; y = g(x,y)")
18
Interpretación como campo vectorial
Cuando la variable t se interpreta como el tiempo, decimos que un sistema de ecuaciones diferenciales es un sistema dinámico y su solución X(t) = (x1(t),..., xn(t)) se denomina estado o respuesta del sistema en el tiempo t. De modo que un sistema dinámico es autónomo cuando la velocidad X'(t) solo depende del estado actual del sistema X(t). En el caso de n = 2 o 3, suele llamarse a la solución trayectoria u órbita.
 = (x1(t),..., xn(t)) se denomina estado o respuesta del sistema en el tiempo t. De modo que un sistema dinámico es autónomo cuando la velocidad X (t) solo depende del estado actual del sistema X(t). En el caso de n = 2 o 3, suele llamarse a la solución trayectoria u órbita.")
19
Interpretación como campo vectorial
Cuando el sistema autónomo es de dos ecuaciones se denomina plano y puede escribirse como: El vector V(x, y) = (P(x, y), Q(x, y)) define un campo vectorial en una región del plano. V(x, y) puede interpretarse como la velocidad de una corriente en la posición (x, y). Y una solución puede interpretarse como la trayectoria de una partícula arrastrada por esa corriente. 19
 = (P(x, y), Q(x, y)) define un campo vectorial en una región del plano. V(x, y) puede interpretarse como la velocidad de una corriente en la posición (x, y). Y una solución puede interpretarse como la trayectoria de una partícula arrastrada por esa corriente. 19.")
20
Ejemplo: Un campo vectorial para el flujo de estado estable de un líquido alrededor de un cilindro de radio 1 está dado por donde V0 es la velocidad del líquido lejos del cilindro. Si se libera un pequeño corcho en (−3, 1), la trayectoria X(t) = (x(t), y(t)) del corcho satisface el sistema autónomo plano: sujeto a la condición Inicial X(0) = (−3, 1).
, la trayectoria. X(t) = (x(t), y(t)) del corcho satisface el sistema autónomo plano: sujeto a la condición. Inicial X(0) = (−3, 1).")
21
Tipos de soluciones Si P(x), Q(x) y sus derivadas parciales de primer orden son continuas en una región R del plano, entonces una solución del sistema que satisface X(0) = X0 es única y de uno de los siguientes tres tipos básicos: (i) Solución constante. (ii) Una solución que define un arco. (iii) Una solución periódica.
, Q(x) y sus derivadas parciales de primer orden son continuas en una región R del plano, entonces una solución del sistema que satisface X(0) = X0 es única y de uno de los siguientes tres tipos básicos: (i) Solución constante. (ii) Una solución que define un arco. (iii) Una solución periódica.")
22
(i) Una solución constante
x(t) = x0, y(t) = y0 (X(t) = X0 para toda t). Una solución constante se llama punto crítico o estacionario. Cuando "una partícula" se coloca en un punto crítico X0 permanece allí indefinidamente, por eso una solución constante también se denomina solución de equilibrio. Observemos que X(t) = 0 es una solución del sistema de ecuaciones algebraicas: Nota: a un punto crítico también se le denomina punto de equilibrio, fijo, de reposo, singular, etc
 = x0, y(t) = y0 (X(t) = X0 para toda t). Una solución constante se llama punto crítico o estacionario. Cuando una partícula se coloca en un punto crítico X0 permanece allí indefinidamente, por eso una solución constante también se denomina solución de equilibrio. Observemos que X(t) = 0 es una solución del sistema de ecuaciones algebraicas: Nota: a un punto crítico también se le denomina. punto de equilibrio, fijo, de reposo, singular, etc.")
23
Solución (a) entonces y = x. Hay infinitos puntos críticos.
Ejemplo: Determina los puntos críticos de los siguientes sistemas autónomos planos: (a) (b) (c) Para encontrar los puntos críticos debes igualar a cero el lado derecho de las ecuaciones diferenciales. y x - = + 2 6 Solución (a) entonces y = x. Hay infinitos puntos críticos.
 (b) (c) Para encontrar los puntos críticos debes igualar a cero el lado derecho de las ecuaciones diferenciales. y. x. - = Solución (a) entonces y = x. Hay infinitos puntos críticos.")
24
Como x2 = y, entonces x2 + y2 – 6 = y + y2 - 6 =
(b) Como x2 = y, entonces x2 + y2 – 6 = y + y2 - 6 = (y + 3)(y – 2) = 0. Si y = – 3, entonces x2 = – 3 y no existen soluciones reales. Si y = 2, entonces Los puntos críticos son y . y x - = + 2 6
 Como x2 = y, entonces x2 + y2 – 6 = y + y2 - 6 = (y + 3)(y – 2) = 0. Si y = – 3, entonces x2 = – 3 y no existen soluciones reales. Si y = 2, entonces . Los puntos críticos son y . y. x. - =")
25
(c) De 0.01x(100 – x – y) = 0, tenemos x = 0 o
x + y = 100. Si x = 0, entonces 0.05y(60 – y – 0.2x) = 0 se transforma en y(60 – y) = 0. Así y = 0 o y = 60, y tenemos como puntos críticos a (0, 0) y (0, 60). Si x + y = 100, entonces 0 = y(60 – y – 0.2(100 – y)) = y(40 – 0.8y). Tenemos que y = 0 o y = 50. Y los puntos críticos son (100, 0) y (50, 50).
 = 0 se transforma en y(60 – y) = 0. Así y = 0 o y = 60, y tenemos como puntos críticos a (0, 0) y (0, 60). Si x + y = 100, entonces 0 = y(60 – y – 0.2(100 – y)) = y(40 – 0.8y). Tenemos que y = 0 o y = 50. Y los puntos críticos son (100, 0) y (50, 50).")
26
(ii) Una solución x = x(t), y = y(t) que define un arco, una curva plana que no se cruza a sí misma, como en la Fig (a). La Fig (b) no puede ser una solución para un sistema autónomo plano , puesto que habría dos trayectorias que comenzarían en el mismo punto P.
 no puede ser una solución para un sistema autónomo plano , puesto que habría dos trayectorias que comenzarían en el mismo punto P..")
27
(iii) Una solución periódica x = x(t), y = y(t) que se denomina ciclo
(iii) Una solución periódica x = x(t), y = y(t) que se denomina ciclo. Si p es el período de la solución, entonces X(t + p) = X(t). Una partícula colocada en la órbita en el punto X(0), por ejemplo, viajará por la curva hasta regresar al punto de partida en p unidades de tiempo.
 Una solución periódica x = x(t), y = y(t) que se denomina ciclo. Si p es el período de la solución, entonces X(t + p) = X(t). Una partícula colocada en la órbita en el punto X(0), por ejemplo, viajará por la curva hasta regresar al punto de partida en p unidades de tiempo.")
28
Solución (a) Habíamos demostrado que la solución era:
Determina si los siguientes sistemas poseen una solución periódica. En cada caso, dibuja la gráfica de la solución que satisface X(0) = (2, 0). (a) (b) Solución (a) Habíamos demostrado que la solución era: Así toda solución es periódica con período . La solución que satisface X(0) = (2, 0) es : x = 2 cos 2t + 2 sen 2t y = – sen 2t Recordatorio
 = (2, 0). (a) (b) Solución (a) Habíamos demostrado que la solución era: Así toda solución es periódica con. período . La solución que satisface. X(0) = (2, 0) es : x = 2 cos 2t + 2 sen 2t. y = – sen 2t. Recordatorio.")
29
Recordemos cómo se resolvía Para 1 = 2i, (2 – 2i)k1 + 8k2 = 0 – k1 + (–2 – 2i)k2 = 0 obtenemos k1 = –(2 + 2i)k2. Elegimos k2 = –1

30
(b) Con el método de vectores y valores propios,
obtenemos: Debido a la presencia de et, no hay soluciones periódicas. La solución que satisface X(0) = (2, 0) es:
 = (2, 0) es:")
31
Cambio a coordenadas polares
Normalmente no es posible encontrar soluciones explícitas para un sistema autónomo no lineal. Pero a veces es posible conseguirlo al cambiar a coordenadas polares. Recuerda que las transformaciones de coordenadas cartesianas (x,y) a polares (r, ө) son: r2 = x2 + y2 y = tan–1(y/x)
 a polares (r, ө) son: r2 = x2 + y2 y = tan–1(y/x)")
32
Hallar la solución del siguiente sistema plano no lineal:
Hallar la solución del siguiente sistema plano no lineal: que satisfaga X(0) = (3, 3). Solución
 = (3, 3). Solución.")
33
Puesto que (3, 3) es en coordenadas polares, X(0) = (3, 3) se transforma en y (0) = π/4. Integrando por separación de variables, tenemos que la solución es: para r 0. Aplicando las condiciones iniciales, tenemos La espiral se bosqueja en la siguiente imagen

34
Considera el sistema en coordenadas polares:
Halla y dibuja las soluciones que satisfagan X(0) = (0, 1) y X(0) = (3, 0) en coordenadas rectangulares. Solución Separando variables, tenemos
 = (0, 1) y X(0) = (3, 0) en coordenadas rectangulares. Solución Separando variables, tenemos.")
35
Si X(0) = (0, 1), entonces r(0) = 1 y (0) = /2.
Así c1 = –2, c2 = /2. La curva solución es la espiral Observemos que cuando t →, aumenta sin límite y r tiende a 3. Si X(0) = (3, 0), entonces r(0) = 3 y (0) = 0. Así c1 = c2 = 0 y r = 3, = t. Tenemos que la solución es x = r cos = 3 cos t e y = r sen = 3 sen t. Es una solución periódica.
 = (3, 0), entonces. r(0) = 3 y (0) = 0. Así. c1 = c2 = 0 y r = 3, = t. Tenemos que la solución. es x = r cos = 3 cos t e. y = r sen = 3 sen t. Es una solución periódica.")
36
Estabilidad de sistemas lineales
Hemos visto como una solución puede interpretarse como la trayectoria de una partícula que al inicio se coloca en la posición X(0) = X0. Si X0 es un punto crítico entonces la partícula permanece estacionaria. Pero, ¿qué ocurre si situamos a la partícula cerca del punto crítico?
 = X0. Si X0 es un punto crítico entonces la partícula permanece estacionaria. Pero, ¿qué ocurre si situamos a la partícula cerca del punto crítico")
37
Estabilidad de sistemas lineales
Supongamos que X1 es un punto crítico de un sistema autónomo plano y que X = X(t) es una solución que satisface X(0) = X0. Nos interesa saber cómo se comporta la partícula cuando X0 está cerca de X1: (i) ¿La partícula va hacia el punto crítico? O dicho de otra forma: ¿limt X(t) = X1? (ii) Si la partícula no va hacia el punto crítico, ¿permanece cerca o se aleja de él? ¿La solución permanece cerca de X1 o se aleja de X1? 37
 es una solución que satisface X(0) = X0. Nos interesa saber cómo se comporta la partícula cuando X0 está cerca de X1: (i) ¿La partícula va hacia el punto crítico O dicho de otra forma: ¿limt X(t) = X1 (ii) Si la partícula no va hacia el punto crítico, ¿permanece cerca o se aleja de él ¿La solución permanece cerca de X1 o se aleja de X1 37.")
38
Punto crítico localmente estable (a) y (b).
Sin embargo, si se puede encontrar en alguna vecindad dada algún valor inicial X0 que da un comportamiento similar a (c), llamamos al punto crítico inestable.
, llamamos al punto crítico inestable.")
39
Análisis de estabilidad
Consideremos x = ax + by y = cx + dy La matriz del sistema es Para asegurar que X0 = (0, 0) es el único punto crítico, supondremos que su determinante vale: = ad – bc 0. Puedes comprobar que entonces la ecuación característica det (A – I) = 0 se puede escribir como: 2 − + = 0 donde = a + d. Así
 es el único punto crítico, supondremos que su determinante vale: = ad – bc 0. Puedes comprobar que entonces la ecuación. característica det (A – I) = 0 se puede escribir como: 2 − + = 0. donde = a + d. Así.")
40
Ejemplo: Determina los valores propios del sistema
en términos de c, y esboza la forma de las soluciones correspondientes a los casos c = ¼ , 4, 0 y −9. Solución Como la matriz de coeficientes es entonces tenemos = a + d = -1 + (-1) = −2, y = 1 – c. Por tanto:
 = −2, y. = 1 – c. Por tanto:")
41
Si c = ¼ , tenemos valores propios negativos y distintos:
= −1/2 y −3/2. En la figura (a) vemos las trayectorias correspondientes a distintas condiciones iniciales. Observa que, excepto para las trayectorias dibujadas en negro, todas las demás parecen aproximarse a (0, 0) desde una dirección fija. Una colección de trayectorias en el plano xy, o plano fase, se denomina mapa o retrato de fase del sistema.
 vemos las trayectorias correspondientes a distintas condiciones iniciales. Observa que, excepto para las trayectorias dibujadas en negro, todas las demás parecen aproximarse a (0, 0) desde una dirección fija. Una colección de trayectorias en el plano xy, o plano fase, se denomina mapa o retrato de fase del sistema.")
42
Cuando c = 4, los autovalores tienen signos opuestos,
= 1 y -3. Las trayectorias se alejan del origen en una dirección fija excepto para las soluciones que comienzan a lo largo de la recta en negro.

43
Cuando c = 0, tenemos un solo valor propio = −1
Cuando c = 0, tenemos un solo valor propio = −1. Todas las soluciones se acercan al origen (Fig (c)). Cuando c = −9, tenemos autovalores complejos conjugados = −1 3i. Las soluciones se acercan en forma espiral al origen (Fig (d)).
). Cuando c = −9, tenemos autovalores complejos conjugados = −1 3i. Las soluciones se acercan en forma espiral al origen (Fig (d)).")
44
Caso I: Valores propios reales y distintos
Vimos que la solución general era: (a) Ambos valores propios negativos: Nodo estable o atractor. Observa que X(t) 0 cuando t . Si suponemos que 2 < 1 entonces: para valores grandes de t. Cuando c1 0, X(t) se aproxima a 0 desde uno de los dos sentidos de la dirección determinada por el vector K1. Si c1 = 0 entonces y la solución tiende al origen a lo largo de la recta determinada por el vector K2.
 Ambos valores propios negativos: Nodo estable o atractor. Observa que X(t) 0 cuando t . Si. suponemos que 2 < 1 entonces: para valores grandes de t. Cuando c1 0, X(t) se aproxima a 0. desde uno de los dos sentidos de la. dirección determinada por el vector K1. Si c1 = 0 entonces. y la solución tiende al origen a lo largo. de la recta determinada por el vector K2.")
45
(b) Ambos valores propios positivos:
Nodo inestable o repulsor. El análisis es similar. Bajo esta condición, |X(t)| queda sin cota cuando t . Si de nuevo suponemos que 2 < 1 entonces: para valores grandes de t. Cuando c1 0, X(t) se aleja de 0 en la dirección marcada por el vector K1. Si c1 = 0 entonces la solución se aleja a lo largo de la recta determinada por el vector K2.
| queda sin cota. cuando t . Si de nuevo. suponemos que 2 < 1 entonces: para valores grandes de t. Cuando c1 0, X(t) se aleja de 0. en la dirección marcada por el vector K1. Si c1 = 0 entonces la. solución se aleja a lo largo de la. recta determinada por el vector K2.")
46
(c) Valores propios con signos opuestos
(2 < 0 < 1): Punto silla. El análisis es similar al caso anterior, excepto en un supuesto. Cuando c1 = 0, X(t) se aproximará 0 a lo largo de la recta determinada por el vector propio K2 cuando t . Si la solución no está sobre esa recta, la marcada por K1 hace de asíntota para la solución. A pesar de que algunas soluciones se acercan al origen, el punto crítico es inestable.
: Punto silla. El análisis es similar al caso anterior, excepto en un supuesto. Cuando c1 = 0, X(t) se aproximará 0 a lo largo de la recta determinada por el vector propio K2 cuando t . Si la solución no está sobre esa recta, la marcada por K1 hace de asíntota para la solución. A pesar de que algunas soluciones se acercan al origen, el punto crítico es inestable.")
47
Clasifica el punto crítico (0, 0) de cada sistema
X = AX como un nodo estable, nodo inestable o un punto silla. (a) (b) Solución (a) Puesto que los valores propios son 4, −1, (0, 0) es un punto silla. Los vectores propios correspondientes son respectivamente:
 (b) Solución. (a) Puesto que los valores propios son 4, −1, (0, 0) es un punto silla. Los vectores propios. correspondientes son respectivamente:")
48
Si X(0) está sobre la recta y = −x, entonces X(t) tiende a 0
Si X(0) está sobre la recta y = −x, entonces X(t) tiende a 0. Para cualquier otra condición inicial, X(t) queda sin cota en las direcciones determinadas por K1. Esto es, y = (2/3)x hace de asíntota para estas soluciones.
 está sobre la recta y = −x, entonces X(t) tiende a 0. Para cualquier otra condición inicial, X(t) queda sin cota en las direcciones determinadas por K1. Esto es, y = (2/3)x hace de asíntota para estas soluciones.")
49
(b) Puesto que los valores propios son −4, −25, (0, 0) es un nodo estable. Los vectores propios correspondientes son respectivamente:

50
Caso II: Valor propio real repetido
(a) Dos vectores propios linealmente independientes La solución general es Si 1 < 0, entonces X(t) tiende a 0 a lo largo de la recta determinada por c1K1 + c2K2 y el punto crítico se llama nodo estable degenerado. La figura (a) muestra la gráfica para 1 < 0. Las flechas se invierten cuando 1 > 0 y entonces el punto crítico se llama nodo inestable degenerado.
 Dos vectores propios linealmente independientes. La solución general es. Si 1 < 0, entonces X(t) tiende a 0 a lo largo de la recta determinada por c1K1 + c2K2 y el punto crítico se llama nodo estable degenerado. La figura (a) muestra la gráfica para 1 < 0. Las flechas se invierten cuando 1 > 0 y entonces el punto crítico se llama nodo inestable degenerado.")
51
(b) Un solo vector propio linealmente independiente Cuando existe un solo valor propio, la solución general es Si 1 < 0, entonces X(t) tiende a 0 en una dirección determinada por el vector K1. Este punto crítico se llama de nuevo nodo estable degenerado. Si 1 > 0, se invierten las flechas y de nuevo el punto crítico se llama nodo inestable degenerado.
 tiende a 0 en una dirección determinada por el vector K1. Este punto crítico se llama de nuevo nodo estable degenerado. Si 1 > 0, se invierten las flechas y de nuevo el punto crítico se llama nodo inestable degenerado.")
52
Caso III: Valores propios complejos
(a) Raíces imaginarias puras (2 – 4 < 0, = 0). El punto crítico se llama centro. Podemos escribir la solución como: Las soluciones son periódicas, con periodo p = 2π/. Se puede demostrar que las soluciones describen elipses centradas en el origen.
 Raíces imaginarias puras (2 – 4 < 0, = 0). El punto crítico se llama centro. Podemos escribir la solución como: Las soluciones son periódicas, con periodo. p = 2π/. Se puede demostrar que las soluciones describen elipses centradas en el origen.")
53
(b) Parte real no nula (2 – 4 < 0, 0).
Parte real < 0: punto espiral estable o atractor (Fig(a)). Parte real > 0: punto espiral inestable o repulsor (Fig(b)). ¿Por qué son espirales?
). Parte real > 0: punto espiral inestable o repulsor (Fig(b)). ¿Por qué. son espirales")
54
Clasifica el punto crítico (0, 0) de cada sistema lineal
Explica la naturaleza de la solución que satisface la condición inicial X(0) =(1, 0) y determina las ecuaciones paramétricas para cada solución. Solución (a) La ecuación característica es 2 + 6 + 9 = ( + 3)2 = por tanto (0, 0) es un nodo estable degenerado. El vector propio asociado al autovalor doble -3 es: de modo que la solución que satisface X(0) = (1, 0) tiende al origen desde la dirección especificada por la recta y = x/3.
 =(1, 0) y determina las ecuaciones paramétricas para cada solución. Solución (a) La ecuación característica es 2 + 6 + 9 = ( + 3)2 = 0 por tanto (0, 0) es un nodo estable degenerado. El vector propio asociado al autovalor doble -3 es: de modo que la solución que satisface X(0) = (1, 0) tiende al. origen desde la dirección especificada por la recta y = x/3.")
55
Vimos que la solución del sistema es:
Aplicando la condición inicial, tenemos que c1 = 0 y c2 = 2; y la solución paramétrica queda:

56
Solución (b) La ecuación característica es 2 + 1 = 0 por tanto (0, 0)
es un centro. La solución que satisface la condición inicial es una elipse que gira alrededor del origen cada 2 unidades de tiempo. La solución general es: Aplicando la condición inicial, tenemos que c1 = 0 y c2 = 1; y la solución paramétrica queda: una elipse recorrida en sentido horario.

57
Clasifica el punto crítico (0, 0) de cada sistema lineal para constantes positivas.
Solución (a) = −0.01, = , 2 − 4 < 0: (0, 0) es un punto espiral estable. (b)
 = −0.01, = , 2 − 4 < 0: (0, 0) es un punto espiral estable. (b)")
58
Para un sistema autónomo lineal plano X’ = AX con det A 0,
TEOREMA Para un sistema autónomo lineal plano X’ = AX con det A 0, sea X = X(t) la solución que satisface la condición inicial X(0) = X0, donde X0 0. (a) limt→X(t) = 0 si y sólo si los valores propios de A tienen partes reales negativas. Esto ocurre cuando ∆ > 0 y < 0. (b) X(t) es periódica si y sólo si los valores propios de A son imaginarios puros. Esto ocurre cuando ∆ > 0 y = 0. (c) En todos los demás casos, dada cualquier vecindad del origen, hay al menos una X0 en la vecindad para la cual X(t) queda sin cota cuando aumenta t. Criterios de estabilidad para sistemas lineales
 la solución que satisface la condición inicial. X(0) = X0, donde X0 0. (a) limt→X(t) = 0 si y sólo si los valores propios de A tienen. partes reales negativas. Esto ocurre cuando ∆ > 0 y < 0. (b) X(t) es periódica si y sólo si los valores propios de A son. imaginarios puros. Esto ocurre cuando ∆ > 0 y = 0. (c) En todos los demás casos, dada cualquier vecindad del. origen, hay al menos una X0 en la vecindad para la cual. X(t) queda sin cota cuando aumenta t. Criterios de estabilidad para. sistemas lineales.")
60
Linealización y estabilidad local
Definición: Punto crítico estable Sea X1 un punto crítico de un sistema autónomo y sea X = X(t) la solución que satisface la condición inicial X(0) = X0, donde X0 X1. Se dice que X1 es un punto crítico estable cuando, dado cualquier radio ρ > 0, hay un radio correspondiente r > 0 tal que si la posición inicial X0 satisface │X0 – X1│< r, entonces la solución correspondiente X(t) satisface │X(t) – X1│< ρ para todo t > 0. Si, además limt→X(t) = X1 siempre que │X0 – X1│< r, se llama a X1 un punto crítico asintóticamente estable. Para resaltar que X0 debe elegirse cerca de X1, también se emplea la terminología punto crítico localmente estable. Al negar la definición anterior obtenemos la definición de punto crítico inestable.
 la solución que satisface la condición inicial X(0) = X0, donde X0 X1. Se dice que X1 es. un punto crítico estable cuando, dado cualquier radio ρ > 0, hay un radio correspondiente r > 0 tal que si la posición inicial X0 satisface │X0 – X1│< r, entonces la solución correspondiente X(t) satisface │X(t) – X1│< ρ para todo. t > 0. Si, además limt→X(t) = X1 siempre que │X0 – X1│< r, se llama a X1 un punto crítico asintóticamente estable. Para resaltar que X0 debe elegirse cerca de X1, también se emplea la terminología punto crítico localmente estable. Al negar la definición anterior obtenemos la definición de punto crítico inestable.")
61
Definición: Punto crítico inestable
Sea X1 un punto crítico de un sistema autónomo y sea X = X(t) la solución que satisface la condición inicial X(0) = X0, donde X0 X1. Se dice que X1 es un punto crítico inestable si hay un disco de radio ρ > 0 con la propiedad de que, para cualquier r > 0, hay al menos una posición inicial X0 que satisface │X0 – X1│< r, pero la solución correspondiente X(t) satisface │X(t) – X1│ ρ para al menos una t > 0. Si un punto crítico X1 es inestable, no importa cuán pequeña sea la vecindad respecto a X1, siempre se puede encontrar una posición inicial X0 que da como resultado que la solución salga de algún disco de radio ρ en algún tiempo futuro t.
 la solución que satisface la condición inicial X(0) = X0, donde X0 X1. Se dice que X1 es un punto crítico inestable si hay un disco de radio ρ > 0 con la propiedad de que, para cualquier. r > 0, hay al menos una posición inicial X0 que satisface. │X0 – X1│< r, pero la solución correspondiente X(t) satisface │X(t) – X1│ ρ para al menos una t > 0. Si un punto crítico X1 es inestable, no importa cuán pequeña sea la vecindad respecto a X1, siempre se puede encontrar una posición inicial X0 que da como resultado que la solución salga de algún disco de radio ρ en algún tiempo futuro t.")
62
Demuestra que (0, 0) es un punto crítico estable del sistema
Solución Vimos que r = 1/(t + c1), = t + c2 es la solución general. Si X(0) = (r0, 0), entonces r = r0/(r0 t + 1), = t +0 Nota que r < r0 para t > 0, y r tiende a (0, 0) cuando t aumenta. De ahí que el punto crítico (0, 0) sea estable y, de hecho, asintóticamente estable.
, = t + c2 es la solución general. Si X(0) = (r0, 0), entonces r = r0/(r0 t + 1), = t +0 Nota que r < r0 para t > 0, y r tiende a (0, 0) cuando t aumenta. De ahí que el punto crítico (0, 0) sea estable y, de hecho, asintóticamente estable.")
63
Linealización Podemos escribir los ejemplos anteriores como
Raramente podemos determinar la estabilidad de un punto crítico de un sistema no lineal al hallar soluciones explícitas, como es el caso de los dos ejemplos con los que empezábamos el capítulo: Podemos escribir los ejemplos anteriores como X = g(X). Linealizar el sistema consistirá en hallar un término lineal A(X – X1) que se aproxima lo máximo posible a g(X). Empecemos primero con una ecuación diferencial de primer orden.
. Linealizar el sistema consistirá en hallar un término lineal A(X – X1) que se aproxima lo máximo posible a g(X). Empecemos primero con una ecuación diferencial de primer orden.")
64
Sea la curva y = g(x). La ecuación de la recta tangente
a dicha curva en el punto x = x1 es: Supongamos que la ecuación diferencial x' = g(x) tiene como punto crítico a x1, entonces: cuya solución general es: donde: De modo que, si g'(x1) < 0, entonces x(t) tiende a x1.
 tiene como punto crítico a x1, entonces: cuya solución general es: donde: De modo que, si g (x1) < 0, entonces x(t) tiende a x1.")
65
Sea x1 un punto crítico de la ecuación diferencial
TEOREMA Sea x1 un punto crítico de la ecuación diferencial autónoma x = g(x), donde g es diferenciable en x1. (a) Si g(x1) < 0, entonces x1 es un punto crítico asintóticamente estable. (b) Si g(x1) > 0, entonces x1 es un punto crítico inestable. Criterio de estabilidad para x' = g(x)
, donde g es diferenciable en x1. (a) Si g(x1) < 0, entonces x1 es un punto crítico. asintóticamente estable. (b) Si g(x1) > 0, entonces x1 es un punto crítico. inestable. Criterio de estabilidad para. x = g(x)")
66
soluciones cerca de estos dos puntos críticos.
Resolver explícitamente la ecuación diferencial es difícil, pero es sencillo determinar el comportamiento de soluciones cerca de estos dos puntos críticos. Como Entonces: x = /4 es un punto crítico asintóticamente estable y x = 5/4 es inestable.

67
Sin resolver de forma explícita, analiza los puntos críticos de la ecuación diferencial logística:
x = (r/K)x(K – x) donde r y K son constantes positivas. Solución Tenemos dos puntos críticos x = 0 y x = K. Como x = K es un punto crítico asintóticamente estable y x = 0 es inestable.
x(K – x) donde r y K son constantes positivas. Solución Tenemos dos puntos críticos x = 0 y x = K. Como. x = K es un punto crítico asintóticamente estable y. x = 0 es inestable.")
68
Matriz jacobiana Podemos hacer un análisis similar para un sistema autónomo plano. La ecuación del plano tangente a la superficie z = g(x, y) en X1 = (x1, y1) es: Podemos aproximar g(x, y) en la vecindad de X1 = (x1, y1) mediante su plano tangente.
 en X1 = (x1, y1) es: Podemos aproximar g(x, y) en la vecindad de. X1 = (x1, y1) mediante su plano tangente.")
69
Matriz jacobiana Si X1 = (x1, y1) es un punto crítico de un sistema autónomo plano, tenemos que P (x1, y1) = 0 y Q (x1, y1) = 0. Podemos aproximar el sistema linealizándolo alrededor del punto X1:
 = 0 y Q (x1, y1) = 0. Podemos aproximar el sistema linealizándolo alrededor del punto X1:")
70
Pasamos del sistema original al sistema linealizado: El sistema original X = g(X) puede aproximarse por X = A(X – X1), donde Esta matriz recibe el nombre de Matriz jacobiana en X1 y se denota por g(X1).
 puede aproximarse por X = A(X – X1), donde Esta matriz recibe el nombre de Matriz jacobiana en X1 y se denota por g(X1).")
71
Sea X1 un punto crítico de la ecuación diferencial
autónoma X’ = g(X), donde P(x, y) y Q(x, y) tienen primeras derivadas parciales continuas en una vecindad de X1. (a) Si los valores propios de A = g’(X1) tienen parte real negativa, entonces X1 es un punto crítico asintóticamente estable. (b) Si A = g’(X1) tiene un valor propio con parte real positiva, entonces X1 es un punto crítico inestable. TEOREMA Criterios de estabilidad para sistemas autónomos planos
, donde P(x, y) y Q(x, y) tienen. primeras derivadas parciales continuas en una. vecindad de X1. (a) Si los valores propios de A = g’(X1) tienen. parte real negativa, entonces X1 es un punto crítico. asintóticamente estable. (b) Si A = g’(X1) tiene un valor propio con parte real. positiva, entonces X1 es un punto crítico inestable. TEOREMA. Criterios de estabilidad para. sistemas autónomos planos.")
72
Clasifica los puntos críticos de cada sistema. (a) x’ = x2 + y2 – 6
Clasifica los puntos críticos de cada sistema. (a) x’ = x2 + y2 – 6 (b) x’ = 0.01x(100 – x – y) y’ = x2 – y y’ = 0.05y(60 – y – 0.2x) Solución (a) Recuerda: Como el determinante de A1 es negativo, A1 tiene un valor propio real positivo. Así que es un punto crítico inestable. A2 tiene un determinante positivo y una traza negativa, así que ambos valores propios tienen sus partes reales negativas. Por lo cual es un punto crítico estable.
 x’ = x2 + y2 – 6 (b) x’ = 0.01x(100 – x – y) y’ = x2 – y y’ = 0.05y(60 – y – 0.2x) Solución (a) Recuerda: Como el determinante de A1 es negativo, A1 tiene un valor propio real positivo. Así que es un punto crítico inestable. A2 tiene un determinante positivo y una traza negativa, así que ambos valores propios tienen sus partes reales negativas. Por lo cual es un punto crítico estable.")
73
Los puntos críticos son (0, 0), (0, 60), (100, 0), (50, 50)
Los puntos críticos son (0, 0), (0, 60), (100, 0), (50, 50). La matriz Jacobiana es: (b) x’ = 0.01x(100 – x – y) y’ = 0.05y(60 – y – 0.2x) Recuerda: (0, 0) es inestable; (0, 60) es inestable; (100, 0) es inestable; (50, 50) es estable.
, (0, 60), (100, 0), (50, 50). La matriz Jacobiana es: (b) x’ = 0.01x(100 – x – y) y’ = 0.05y(60 – y – 0.2x) Recuerda: (0, 0) es inestable; (0, 60) es inestable; (100, 0) es inestable; (50, 50) es estable.")
74
¿Se pueden clasificar los puntos críticos de sistemas
no lineales con más detalle? Recuerda:

75
Solución Para la matriz A1 correspondiente a (0, 0),
Clasifica con más detalle todos los puntos críticos del ejemplo anterior. Recuerda: Solución Para la matriz A1 correspondiente a (0, 0), = 3, = 4, 2 – 4 = 4. Así que (0, 0) es un nodo inestable. Los puntod críticos (0, 60) y (100, 0) son sillas puesto que < 0 en ambos casos. Para A4, > 0, < 0, (50, 50) es un nodo estable.
, = 3, = 4, 2 – 4 = 4. Así que (0, 0) es un nodo inestable. Los puntod críticos (0, 60) y (100, 0) son sillas puesto que < 0 en ambos casos. Para A4, > 0, < 0, (50, 50) es un nodo estable.")
76
Considera el sistema x + x – x3 = 0. Tenemos. x = y,. y = x3 – x
Considera el sistema x + x – x3 = 0. Tenemos x = y, y = x3 – x. Halle y clasifique los puntos críticos. Solución Recuerda: (Podría tratarse tanto de una espiral estable, como una inestable o un centro).
.")
77
Método del plano fase Vamos a clasificar el único punto crítico (0, 0) del sistema x = y2 y = x2 mediante el método del plano fase. La matriz Jacobiana del sistema es: y en el punto crítico (0, 0) todos sus elementos son 0, de modo que la naturaleza de (0, 0) permanece en duda.
 todos sus elementos son 0, de modo que la naturaleza de (0, 0) permanece en duda.")
78
Método del plano fase Si dibujamos una colección de curvas soluciones, queda claro que el punto crítico (0, 0) es inestable.
 es inestable.")
79
Usa el método de plano fase para determinar la naturaleza de las soluciones de x + x − x3 = 0 en cercanías de (0, 0). Solución

80
Nota que y = 0 cuando x = −x0 y que el lado derecho de la ecuación es positivo cuando −x0 < x < x0. Así que cada x tiene dos valores correspondientes de y. La solución X = X(t) que satisface X(0) = (x0, 0) es periódica, y (0, 0) es un centro.
 que satisface X(0) = (x0, 0) es periódica, y (0, 0) es un centro..")
Presentaciones similares















, fue un dramaturgo, poeta y actor inglés. Conocido en ocasiones como el Bardo de Avon (o.>")



