Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Modulo 4 – Seguridad y calidad de ICN
Modulo 4 – Seguridad y calidad de ICN. Aplicaciones Task 4_2 - Areas de aplicación de ICN Introducción La principal aplicación de redes industriales se centra en que el control industrial juega un papel importante en el automatizado fábricas de fabricación, en el que tiene que tomar una gran cantidad de datos del flujo a través de diferentes sensores de los procesos de fabricación, para poder llevar a cabo acciones rápidas, en función de los datos recogidos de los componentes de la fábrica (máquinas, robots, alarmas, motores, válvulas, etc.) Además hay otras áreas de aplicación para las redes industriales. La mayoría de estas aplicaciones tienen algunos requisitos que son satisfechos por cualquier red industrial, pero hay aplicaciones con características específicas en las que no todos los protocolos son exactos. Este módulo tiene como objetivo proporcionar una visión general de las áreas de aplicación de las redes industriales en la actualidad. Sistemas de control industrial La principal aplicación de redes industriales se centra en el control industrial. Hay dos conceptos diferentes para la industria de sistemas de control: centralizado y distribuido. En un sistema de control centralizado sólo hay un controlador, en donde todas las señales de entrada fluyen, a continuación, se procesan dándose cuenta y generando todos los algoritmos de control de todas las señales de salidas necesarias. El sistema de control centralizado sincroniza los tres objetivos mencionados a través del reloj de sistema local (fig. 1).
 Además hay otras áreas de aplicación para las redes industriales. La mayoría de estas aplicaciones tienen algunos requisitos que son satisfechos por cualquier red industrial, pero hay aplicaciones con características específicas en las que no todos los protocolos son exactos. Este módulo tiene como objetivo proporcionar una visión general de las áreas de aplicación de las redes industriales en la actualidad. Sistemas de control industrial La principal aplicación de redes industriales se centra en el control industrial. Hay dos conceptos diferentes para la industria de sistemas de control: centralizado y distribuido. En un sistema de control centralizado sólo hay un controlador, en donde todas las señales de entrada fluyen, a continuación, se procesan dándose cuenta y generando todos los algoritmos de control de todas las señales de salidas necesarias. El sistema de control centralizado sincroniza los tres objetivos mencionados a través del reloj de sistema local (fig. 1).")
2
Un Sistema de Control Distribuido (Figura 2) es la conexión de diferentes nodos físicos distribuidos que están equipados con sensores de potencia de procesamiento y / o mecanismos y conectados a través de una red de comunicación. Estos sistemas se caracterizan por el hecho de que el proceso controlado se lleva a cabo en estos nodos de una manera coordinada. Ambos sistemas tienen sensores y actuadores. Los sensores son dispositivos capaces de convertir el valor de una magnitud física en una señal eléctrica, que con razón determinada, se convierte en señales de entrada de la muestra. El actuador convierte la señal de salida eléctrica de una acción de un sistema de control, como la apertura de una válvula de cierre de un contactor. Los sistemas centralizados conducen cables costosos y pesados de posición en posición (no debe haber cables dobles trenzados de cada sensor o mecanismo para el sistema central) y también conduce a la utilización de redes similares para la conexión del sensor y para mecanismos de activación e indicadores. En estos sistemas, la exactitud de cualquier sensor sin precauciones especiales está limitada por el nivel del ruido existente en los entornos industriales y es difícil de superar una precisión de 0,1% . Los nodos del sistema de intercambio de información del sistema de control distribuido entre sí a través de mensajes que circulan en la red de comunicación. Los datos enviados desde cada nodo están disponibles para cualquier nodo que sea miembro de la red. Los nodos con sensores que producen mensajes que contienen los valores de las variables medidas. Los nodos con mecanismos toman el valor atribuible al objeto controlado a partir de los mensajes en la red, tales como el grado de apertura de una válvula. En estos sistemas distribuidos de un nodo es un procesador autónomo con su propio hardware: procesador (CPU), memoria, oscilador de reloj, interfaz de comunicaciones y de entrada / interfaz para el subsistema físico que controla la salida. Una unidad de interfaz de comunicación (CIU) consta de un controlador de comunicación que gestiona la comunicación parcial o completa y un receptor que se adapta señales de niveles TTL requeridos por los medios físicos de transmisión. Si el nodo no tiene sensores de la interfaz de entrada / salida incluye un amplificador y filtro de la señal original generada por el sensor y un convertidor analógico / digital (ADC) para convertir la señal analógica a un formato digital. El resultado del valor numérico posteriormente se puede procesar digitalmente. En cuanto a la resolución del ADC (el número de bits en la palabra de salida) que se utiliza en aplicaciones industriales por lo general es 10 bit (1024 pasos). A mayor resolución requiere de un ambiente con reducción de ruido que no existe en un entorno industrial. Por lo tanto, 16 bits de longitud de una palabra es más que suficiente para codificar el valor medido. Muy a menudo, la CPU del nodo tiene un ancho de 16 bits de la palabra, así como el ancho de palabra común es 8 bits. El software del nodo incluye: un programa de aplicación, procesamiento digital de señales, comunicaciones (si no están plenamente controlados por el controlador de comunicación) y, posiblemente, un sistema operativo. Dentro del sistema de distribución, un nodo realiza una serie de funciones específicas.
 y también conduce a la utilización de redes similares para la conexión del sensor y para mecanismos de activación e indicadores. En estos sistemas, la exactitud de cualquier sensor sin precauciones especiales está limitada por el nivel del ruido existente en los entornos industriales y es difícil de superar una precisión de 0,1% . Los nodos del sistema de intercambio de información del sistema de control distribuido entre sí a través de mensajes que circulan en la red de comunicación. Los datos enviados desde cada nodo están disponibles para cualquier nodo que sea miembro de la red. Los nodos con sensores que producen mensajes que contienen los valores de las variables medidas. Los nodos con mecanismos toman el valor atribuible al objeto controlado a partir de los mensajes en la red, tales como el grado de apertura de una válvula. En estos sistemas distribuidos de un nodo es un procesador autónomo con su propio hardware: procesador (CPU), memoria, oscilador de reloj, interfaz de comunicaciones y de entrada / interfaz para el subsistema físico que controla la salida. Una unidad de interfaz de comunicación (CIU) consta de un controlador de comunicación que gestiona la comunicación parcial o completa y un receptor que se adapta señales de niveles TTL requeridos por los medios físicos de transmisión. Si el nodo no tiene sensores de la interfaz de entrada / salida incluye un amplificador y filtro de la señal original generada por el sensor y un convertidor analógico / digital (ADC) para convertir la señal analógica a un formato digital. El resultado del valor numérico posteriormente se puede procesar digitalmente. En cuanto a la resolución del ADC (el número de bits en la palabra de salida) que se utiliza en aplicaciones industriales por lo general es 10 bit (1024 pasos). A mayor resolución requiere de un ambiente con reducción de ruido que no existe en un entorno industrial. Por lo tanto, 16 bits de longitud de una palabra es más que suficiente para codificar el valor medido. Muy a menudo, la CPU del nodo tiene un ancho de 16 bits de la palabra, así como el ancho de palabra común es 8 bits. El software del nodo incluye: un programa de aplicación, procesamiento digital de señales, comunicaciones (si no están plenamente controlados por el controlador de comunicación) y, posiblemente, un sistema operativo. Dentro del sistema de distribución, un nodo realiza una serie de funciones específicas..")
3
Actualmente, los sistemas de control más utilizados son distribuidos
Actualmente, los sistemas de control más utilizados son distribuidos. Inicialmente, la razón principal para pasar de un sistema centralizado a un sistema distribuido es la necesidad de simplificación y normalización de cableado basado en la filosofía de sustitución de cobre (cableado costoso desde el punto para ver) con el silicio (nodos inteligentes conectados por un par de cables trenzados con una sección transversal pequeña) y logrando así la reducción de costes. Sin embargo, hay otras razones por las que en un sistema de distribución se recomienda más de un sistema centralizado: • Mayor inmunidad al ruido: como en el caso de un sistema distribuido el sensor y el nodo están muy cerca o en el mismo paquete (sensores inteligentes) por lo tanto, ellos no son causa de distorsiones en el sensor y en un sistema centralizado de la señal analógica recorre toda la distancia desde el sensor hasta el sistema central con la correspondiente pérdida de calidad.
 con el silicio (nodos inteligentes conectados por un par de cables trenzados con una sección transversal pequeña) y logrando así la reducción de costes. Sin embargo, hay otras razones por las que en un sistema de distribución se recomienda más de un sistema centralizado: • Mayor inmunidad al ruido: como en el caso de un sistema distribuido el sensor y el nodo están muy cerca o en el mismo paquete (sensores inteligentes) por lo tanto, ellos no son causa de distorsiones en el sensor y en un sistema centralizado de la señal analógica recorre toda la distancia desde el sensor hasta el sistema central con la correspondiente pérdida de calidad.")
4
• Los nodos de un sistema distribuido pueden estar más separados el uno del otro que los sensores y mecanismos de un sistema centralizado, como las redes de comunicación digitales permiten distancias máximas mayores que las redes analógicas de 4-20 mA. • Inteligencia distribuida: una parte de los algoritmos de control se incluyen en los nodos inteligentes, lo que simplifica el sistema de control en su conjunto. • Seguridad: un error de sistema centralizado en el ordenador central puede suspender el trabajo de toda la instalación. En una arquitectura distribuida que es posible establecer una "isla" de automatizado que resuelve parte del proceso solamente. En caso de un error de esa "isla" no se puede molestar a los otros subsistemas. Los Sistemas distribuidos también facilitan la creación de muchas arquitecturas. • Flexibilidad: un sistema distribuido tiene el potencial de expandirse sin conducir a la complicación de análisis funcional de la misma al aumentar el número de nodos. • En un sistema distribuido, que es fácil de extraer toda la funcionalidad de la obra de cada parte, de manera que el control del correcto funcionamiento de cada una de las partes puede establecer el correcto funcionamiento de todo el sistema. Sensores inteligentes La tendencia de los sistemas industriales actuales se está acercando a ser más inteligente en el punto de medición y la sustitución de la transmisión de señales analógicas con una transmisión a través de una red de datos digitales. Un sensor puede ser considerado inteligente si además de un sensor en el mismo circuito integrado hay uno incluido en otro esquema u otros esquemas que implementan una de las siguientes funciones: • Ajuste analógico: expansión y filtrado. • Conversión de analógico a digital. • Procesamiento primario de la información (linealización auto-calibración, comprobación de los otros medibles.) • Compensación por cambios en las condiciones del entorno. • Conversión de unidades de medida. • El autodiagnóstico. • La salida de datos digitales en las unidades de medida. • Comunicaciones con una red digital. Además, cada vez es más común que un sensor y el microcontrolador conectado se encuentren en el mismo paquete físico. El microcontrolador proporciona las señales de control necesarias desde el sensor / actuador, y realiza procesamientos digitales de la señal (por ejemplo, filtrado), la depuración local y entrega del valor de las variables medidas en unidades de ingeniería, por una notificación enviada en la red industrial. En general, un sensor inteligente se caracteriza por su potencia de cálculo y procesamiento descentralizado que permite el procesamiento de información digital y la comunicación con la red de información (fig. 3).
 • Compensación por cambios en las condiciones del entorno. • Conversión de unidades de medida. • El autodiagnóstico. • La salida de datos digitales en las unidades de medida. • Comunicaciones con una red digital. Además, cada vez es más común que un sensor y el microcontrolador conectado se encuentren en el mismo paquete físico. El microcontrolador proporciona las señales de control necesarias desde el sensor / actuador, y realiza procesamientos digitales de la señal (por ejemplo, filtrado), la depuración local y entrega del valor de las variables medidas en unidades de ingeniería, por una notificación enviada en la red industrial. En general, un sensor inteligente se caracteriza por su potencia de cálculo y procesamiento descentralizado que permite el procesamiento de información digital y la comunicación con la red de información (fig. 3)..")
5
Las funciones características más comunes que hacen que las herramientas de medición de los sensores inteligentes de nueva generación son: - El cálculo directo del valor de medición recibido ajustado por los factores de confusión, sin tener que recurrir a la calibración de la computadora central. - Las señales suministradas son digitales en vez de analógicos. - Capacidad para identificar el sensor. - La comunicación con el ordenador central de la red en lugar de sólo el envío. - Incluir las mejoras adicionales en el transmisor, liberando a la computadora central de las tareas secundarias. - Capacidad para realizar el autodiagnóstico y la elaboración de directrices para el desarrollo futuro. - Capacidad para compensar en sistemas de tiempo real para la medición y la recepción de datos y los sistemas de control en un ciclo cerrado. - Posibilidad de multi-sensores.

6
Desde que 1993 IEEE inicializa el desarrollo de la norma 1451 en respuesta a las necesidades de los fabricantes de sensores y actuadores para configurar los sistemas de distribución con una capacidad de inteligencia local y auto-diagnóstico, control, el procesamiento y la total independencia de una conexión de red. El equipo en sistemas de control de distribución. Software SCADA El PC es generalmente parte del sistema de control de distribución. Sin embargo, su papel no es el control directo de la fábrica como en el caso de los controladores y otros mecanismos y los nodos, ni es la medición directa de las variables en la fábrica, como en los nodos de sensores. Su función más común dentro del sistema de distribución es la implementación de un programa llamado SCADA, que es sinónimo de Control de Supervisión y Adquisición de Datos (Colección de Control de Datos y Observatorio). Con el programa SCADA que puede convertir un ordenador personal (PC) en la posición de montaje observada y controlada - Sistema SCADA. Por un lado, esta SW permite la comunicación del PC con los nodos de la red de distribución y por lo tanto el PC recoge los datos desde la red de comunicaciones de la fábrica. Por otro lado, bajo el control SW se presenta gráficamente la fábrica en un la pantalla de alta resolución con los valores de las diferentes variables del proceso. Además, el operador puede interactuar con esta representación gráfica de la fábrica con el uso del ratón y el teclado de la computadora y se puede cambiar el estado de las salidas digitales (por ejemplo, a fin de abrir o cerrar una válvula), y puede cambiar de dirección de los reguladores usando redes de comunicación de estas acciones a los nodos apropiados. Además de las funciones anteriores, un sistema SCADA tiene las siguientes características: - La monitorización remota de instalaciones: con esta función, el usuario puede estar informado sobre el estado de la fábrica y puede coordinar de manera eficaz la producción y el mantenimiento de las instalaciones. - Control remoto de las instalaciones: además del control remoto a petición del operador, comentado anteriormente, los Programas SCADA permiten la ejecución automática de las acciones pre-programadas (por ejemplo, la apertura / cierre de una válvula) en función de los valores reales de las variables de la fábrica o combinación de ellos. Esto también puede ser automática en función de las condiciones preestablecidas que pueden cambiar los parámetros del sistema (por ejemplo, cambio de los límites de activación de la alarma). - Presentación de gráficos dinámicos: presentaciones gráficas de la fábrica tienen animación. - Además de la actualización periódica de los valores de todas las variables de la demostración de la planta puede mostrar figuras animadas y dibujos, cambio de color, etc (por ejemplo, se pueden producir destellos de luz a las alarmas de señal). - Presentación de las alarmas para alertar al operador a través de señales periódicas, las señales acústicas de cambio de color, etc. por situaciones anormales, por lo que pueden tomar las medidas correctivas apropiadas. - Almacenamiento de una historia de datos: Registrarse periódicamente y almacenar datos en la fábrica intervalos y / o datos de alarma y más. No sólo los fabricantes de automatización comercializan programas SCADA, también hay empresas que se especializan en el paquete SW.
. Con el programa SCADA que puede convertir un ordenador personal (PC) en la posición de montaje observada y controlada - Sistema SCADA. Por un lado, esta SW permite la comunicación del PC con los nodos de la red de distribución y por lo tanto el PC recoge los datos desde la red de comunicaciones de la fábrica. Por otro lado, bajo el control SW se presenta gráficamente la fábrica en un la pantalla de alta resolución con los valores de las diferentes variables del proceso. Además, el operador puede interactuar con esta representación gráfica de la fábrica con el uso del ratón y el teclado de la computadora y se puede cambiar el estado de las salidas digitales (por ejemplo, a fin de abrir o cerrar una válvula), y puede cambiar de dirección de los reguladores usando redes de comunicación de estas acciones a los nodos apropiados. Además de las funciones anteriores, un sistema SCADA tiene las siguientes características: - La monitorización remota de instalaciones: con esta función, el usuario puede estar informado sobre el estado de la fábrica y puede coordinar de manera eficaz la producción y el mantenimiento de las instalaciones. - Control remoto de las instalaciones: además del control remoto a petición del operador, comentado anteriormente, los Programas SCADA permiten la ejecución automática de las acciones pre-programadas (por ejemplo, la apertura / cierre de una válvula) en función de los valores reales de las variables de la fábrica o combinación de ellos. Esto también puede ser automática en función de las condiciones preestablecidas que pueden cambiar los parámetros del sistema (por ejemplo, cambio de los límites de activación de la alarma). - Presentación de gráficos dinámicos: presentaciones gráficas de la fábrica tienen animación. - Además de la actualización periódica de los valores de todas las variables de la demostración de la planta puede mostrar figuras animadas y dibujos, cambio de color, etc (por ejemplo, se pueden producir destellos de luz a las alarmas de señal). - Presentación de las alarmas para alertar al operador a través de señales periódicas, las señales acústicas de cambio de color, etc. por situaciones anormales, por lo que pueden tomar las medidas correctivas apropiadas. - Almacenamiento de una historia de datos: Registrarse periódicamente y almacenar datos en la fábrica intervalos y / o datos de alarma y más. No sólo los fabricantes de automatización comercializan programas SCADA, también hay empresas que se especializan en el paquete SW..")
8
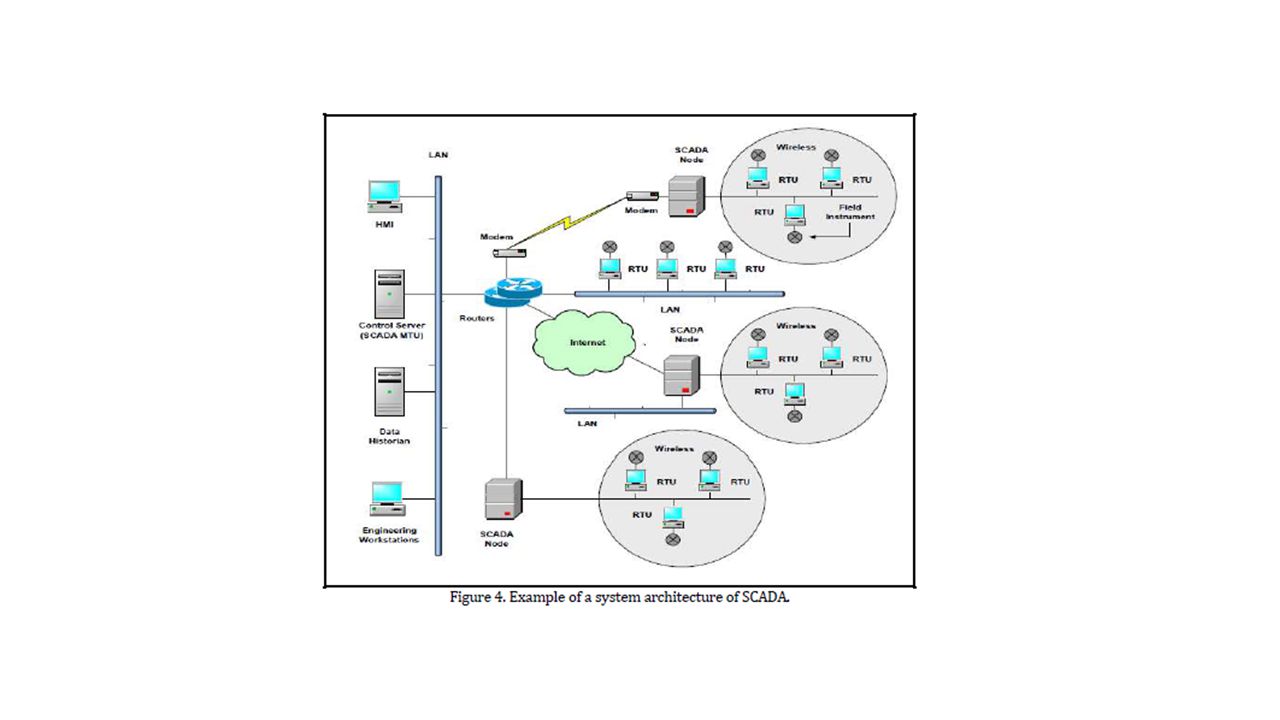
Más sobre SCADA: SCADA - son sistemas altamente distribuidos y utilizados para el control de los objetos dispersos geográficamente (hasta miles de kilómetros cuadrados) recogida centralizada y el procesamiento de datos, generan efectos de control. Los Campos de aplicación típicos son: el transporte ferroviario, la red de electricidad, gasoductos y sistemas de distribución de tuberías de petróleo de los recursos de agua y más, seguimiento y control de las instalaciones y el procesamiento de las alarmas centralizadas. La información es transmitida a través de redes informáticas a grandes distancias. En la base de la información recibida y procesada se producen comandos de control que se envían a los dispositivos remotos (campo). En la figura 4 anterior se muestra un ejemplo de una arquitectura de sistema de SCADA. Otras aplicaciones de redes industriales Además de que el control industrial de las redes industriales tiene una amplia variedad de importantes áreas de aplicación. Aunque cualquier red industrial puede cumplir con los requisitos de la mayoría de estas aplicaciones hay otros con características más específicas, si no todos los protocolos adecuados. Por ejemplo, en la producción industrial y la energía que es necesario utilizar protocolos que son resistentes a las influencias electromagnéticas, polvo, productos químicos peligrosos, la temperatura y la humedad. Para la producción de gas es importante tener en cuenta el comportamiento de la carretera de entrada y salida en términos de la explosividad y los ambientes inflamables. Además, dependiendo de la aplicación de la carretera de entrada y salida debe tener estabilidad, incluyendo en los términos de una fuerte de ciclos de transmisión de corriente o pequeña (ciclos de menos de 10 ms). En las plantas químicas el protocolo de red industrial seleccionado debe ser compatible con la segmentación, como el número de dispositivos conectado a una red puede ser muy alta. Además, las aplicaciones en entornos peligrosos que requieren dispositivos con conexiones eléctricas de seguridad intrínseca y fuente de alimentación a través de un bus. Redes industriales utilizadas en la producción deben ser capaces de realizar operaciones en tiempo real y de alto ancho de banda. Las aplicaciones electromecánicas requieren velocidades muy altas de transmisión (períodos de menos de 10 ms), alta resistencia electromagnética, un gran número de dispositivos conectados y los mensajes con longitud más larga para las funciones de servicio. En oleoductos y refinerías en tierra y mar, salvo las restricciones necesarias para ambientes explosivos e inflamables también se requiere que las plantas sean resistentes a la humedad y a la corrosión. En estas aplicaciones, también es importante lograr una reducción en el peso de la instalación, especialmente de la instalación eléctrica. Especialmente se debe prestar atención a la automatización de interiores y automatización residencial, un sector en rápido desarrollo.
. En la figura 4 anterior se muestra un ejemplo de una arquitectura de sistema de SCADA. Otras aplicaciones de redes industriales Además de que el control industrial de las redes industriales tiene una amplia variedad de importantes áreas de aplicación. Aunque cualquier red industrial puede cumplir con los requisitos de la mayoría de estas aplicaciones hay otros con características más específicas, si no todos los protocolos adecuados. Por ejemplo, en la producción industrial y la energía que es necesario utilizar protocolos que son resistentes a las influencias electromagnéticas, polvo, productos químicos peligrosos, la temperatura y la humedad. Para la producción de gas es importante tener en cuenta el comportamiento de la carretera de entrada y salida en términos de la explosividad y los ambientes inflamables. Además, dependiendo de la aplicación de la carretera de entrada y salida debe tener estabilidad, incluyendo en los términos de una fuerte de ciclos de transmisión de corriente o pequeña (ciclos de menos de 10 ms). En las plantas químicas el protocolo de red industrial seleccionado debe ser compatible con la segmentación, como el número de dispositivos conectado a una red puede ser muy alta. Además, las aplicaciones en entornos peligrosos que requieren dispositivos con conexiones eléctricas de seguridad intrínseca y fuente de alimentación a través de un bus. Redes industriales utilizadas en la producción deben ser capaces de realizar operaciones en tiempo real y de alto ancho de banda. Las aplicaciones electromecánicas requieren velocidades muy altas de transmisión (períodos de menos de 10 ms), alta resistencia electromagnética, un gran número de dispositivos conectados y los mensajes con longitud más larga para las funciones de servicio. En oleoductos y refinerías en tierra y mar, salvo las restricciones necesarias para ambientes explosivos e inflamables también se requiere que las plantas sean resistentes a la humedad y a la corrosión. En estas aplicaciones, también es importante lograr una reducción en el peso de la instalación, especialmente de la instalación eléctrica. Especialmente se debe prestar atención a la automatización de interiores y automatización residencial, un sector en rápido desarrollo..")
9
Automatización interna y automatización de edificios Se trata de sistemas automatizados para edificios residenciales y no residenciales. El objetivo es encontrar métodos simples para una interconexión compatible con todas las tecnologías, fácil de configurar y administrar, lo que permite una mayor calidad de empleo, el aumento de la riqueza, la comodidad y la seguridad de los consumidores, mientras que el uso racional de energía. Desde los años 80 hasta nuestros días sobre la base de las decisiones, estos sistemas han pasado por distintas fases. Al principio hubo una gran falta de conocimiento de automatización interna como disciplina y sus aplicaciones. Había un pequeño número de empresas especializadas en este sector y por lo tanto su ofertas era limitada: sistemas menos integrados difícil de instalar y demasiado caro. De hecho, disponible en los sistemas de mercado se basan en los productos diseñados y fabricados para otros mercados con otras características y necesidades. En los años 90 esta tendencia continuó en la misma forma por la aplicación de las tecnologías utilizadas por otros sectores, con ligeros ajustes que requieren un alto nivel de profesionalidad del instalador y el usuario. Hoy es un nuevo impulso el que se le da a este sector debido a la subida de conceptos como el ahorro energético, confort y seguridad. Hay nuevas empresas en el sector y el mercado ha regulado de forma automática. Las principales áreas de aplicación son los nuevos usos residenciales con menos equipo, mejor utilización y un menor número de dificultades para el sector de la construcción, con los sistemas de automatización, control y regulación de las instalaciones. Hay una distribución mejorada de estas tecnologías en los campos de un determinado nivel (conferencias, seminarios, foros, concursos, prensa, etc.) el prototipo de estos sistemas asociados con la ficción de épocas anteriores, que fue minando su implementación. Una clasificación muy característica de los sistemas de gestión técnica de edificios (SGTE) se basa en que el dispositivo de envío (capa física) que se utiliza entre los elementos que forman el sistema, independientemente de la lengua o protocolo utilizado. La Tabla 8.1 muestra los diversos medios utilizados con algunas de sus características, sus necesidades y sus usos. La principal diferencia entre la domótica y la automatización industrial es que este último es un punto de referencia en el entorno de la industria, los productos son más estables, fiables y caros y que es apoyado por las principales empresas del sector de la automatización y control (Siemens, Honeywell, Jonhson Controls, Sauter, Trend, etc) .. En una instalación de automatización industrial hay tres niveles distintos de topología: el nivel de la zona, de la automatización y de la gestión de una arquitectura distribuida. En este entorno, hay más oportunidades para las redes de apertura, la tecnología y las normas que ya han sido mostradas en este curso. Industria del automóvil Las Redes industriales no sólo tienen una aplicación en el proceso, sino que también se incluyen en los de los productos, ya sea para consumo (automóviles) o instalaciones (maquinaria textil, envasado de alimentos, etc). En la industria de la electrónica del automóvil, empezando por las radios, se extiende hasta el encendido del motor y llega a los valores de funcionamiento del motor sin carburador (EMU, Engine Unidad de Gestión), que controlan: consumo de combustible, las emisiones, el arranque en clima frío, el buen funcionamiento, la regularidad en punto muerto (Ralentí más estable), alcanzando rápidamente la velocidad máxima (pickup más rápido) y otros (Figura 5).
 el prototipo de estos sistemas asociados con la ficción de épocas anteriores, que fue minando su implementación. Una clasificación muy característica de los sistemas de gestión técnica de edificios (SGTE) se basa en que el dispositivo de envío (capa física) que se utiliza entre los elementos que forman el sistema, independientemente de la lengua o protocolo utilizado. La Tabla 8.1 muestra los diversos medios utilizados con algunas de sus características, sus necesidades y sus usos. La principal diferencia entre la domótica y la automatización industrial es que este último es un punto de referencia en el entorno de la industria, los productos son más estables, fiables y caros y que es apoyado por las principales empresas del sector de la automatización y control (Siemens, Honeywell, Jonhson Controls, Sauter, Trend, etc) .. En una instalación de automatización industrial hay tres niveles distintos de topología: el nivel de la zona, de la automatización y de la gestión de una arquitectura distribuida. En este entorno, hay más oportunidades para las redes de apertura, la tecnología y las normas que ya han sido mostradas en este curso. Industria del automóvil Las Redes industriales no sólo tienen una aplicación en el proceso, sino que también se incluyen en los de los productos, ya sea para consumo (automóviles) o instalaciones (maquinaria textil, envasado de alimentos, etc). En la industria de la electrónica del automóvil, empezando por las radios, se extiende hasta el encendido del motor y llega a los valores de funcionamiento del motor sin carburador (EMU, Engine Unidad de Gestión), que controlan: consumo de combustible, las emisiones, el arranque en clima frío, el buen funcionamiento, la regularidad en punto muerto (Ralentí más estable), alcanzando rápidamente la velocidad máxima (pickup más rápido) y otros (Figura 5)..")
10
Además de controlar el motor hay otros sistemas electrónicos en los vehículos, ya sea para las funciones convencionales, Frenos antibloqueo (ABS, sistema antibloqueo de frenos), seguridad (airbags), aire acondicionado y más. Para la navegación con características sofisticadas (IVHS, sistema de la carretera de vehículos inteligentes) basados en: sistemas de posicionamiento por satélite geográfico (GPS), geográficos Sistemas de Información (SIG), antii-choque y visión nocturna por infrarrojos. La interconexión de todos los sistemas a bordo del vehículo se basa en las redes industriales concretas, y aunque a partir de estos sistemas de bus CAN destaca que hay otros. En 1996 Philips inventó el transistor para CAN de alta disponibilidad aumentando la seguridad en los automóviles. Las Redes industriales para el diagnóstico de los coches se pueden ver en la UART-9141 en Europa y en el de la organización J1850 SAE (Society of Automotive Engineers) en los Estados Unidos.
 basados en: sistemas de posicionamiento por satélite geográfico (GPS), geográficos Sistemas de Información (SIG), antii-choque y visión nocturna por infrarrojos. La interconexión de todos los sistemas a bordo del vehículo se basa en las redes industriales concretas, y aunque a partir de estos sistemas de bus CAN destaca que hay otros. En 1996 Philips inventó el transistor para CAN de alta disponibilidad aumentando la seguridad en los automóviles. Las Redes industriales para el diagnóstico de los coches se pueden ver en la UART-9141 en Europa y en el de la organización J1850 SAE (Society of Automotive Engineers) en los Estados Unidos..")
11
Navegación marítima Hay redes industriales diseñadas para su uso específico en sistemas de navegación marítima. Uno de estos protocolos es MITS * (Información Marítima Tecnología estándar). Este es un estándar de comunicación abierto destinado principalmente para su uso en sistemas de control integrado para barcos, aunque también tiene aplicaciones en los sistemas basados en tierra. MITS fue desarrollado dentro del programa de investigación de Investigación en Ciencias del Mar y Tecnologías de la Información auspiciada por la "Consejo de Investigación" de Noruega y los productores noruegos de los equipos de vigilancia de buques. MITS está diseñado para conectar el subsistema que puede estar ubicado en diferentes ubicaciones físicas. Cada subsistema puede utilizar otros protocolos, pero también puede utilizar MiTs dentro de estos subsistemas. Este protocolo también se puede usar para adquirir datos en niveles más altos y estaciones de trabajo y ordenadores dedicados a tareas administrativas que no son críticos, ni en tiempo real. Un ejemplo de una configuración típica se muestra en la figura. 6.

12
Los nodos de la red MITS Cada nodo físico en una red MITS tiene una arquitectura de software común basado en 3 tipos de módulos diferentes (Fig. 7).: • MAU (unidad de aplicación MITS): Contiene el software de la aplicación y está subordinado a una comunicación LNA servidor. • LNA (Administración de Red Local): una estación principal, la cual está sujeta a Maus, y se puede comunicar con otros LNA en el mismo nivel (multi-master). LNA también funciona como un multiplexor / demultiplexor mensajes Maus entre diferentes nodos. Todos los LNA tienen una funcionalidad idéntica y sólo se diferencian en los detalles pertinentes relacionados con cada configuración. • CNA (nodo de comunicación para mensajes administrativos): Actúan como servidores de LNA. Cada LNA necesita un CNA en las configuraciones en las que hay más de un LNA utilizado. Esta arquitectura de software es transparente para el programador de la aplicación, que sólo ve un sistema de red que consta de un solo módulo de MAU. MITS es una combinación de los protocolos de las diferentes estaciones principales (varios maestros) y amo-esclavo. LNA con las ANC relevantes son las principales estaciones que pueden comunicarse entre sí. MAUs están subordinados a estaciones, que requieren una estación principal para ser capaz de comunicarse con otras estaciones subordinadas. Sin embargo, un MAU puede comenzar a transferir en cualquier momento sin el permiso de la estación central. Así MITS no se comporta en este caso como un protocolo típico de de un mensaje principal subordinatetype. Típicamente, la topología de una red MiTs es un autobús porque los nodos por lo general tienen una MAU para cada LNA. Sin embargo, si las redes MITS tienen sólo un LNA, se define como una topología en estrella, donde todos MAU (aunque son diferentes nodos) están conectados a LNA utilizando este punto a punto conexiones.
 y amo-esclavo. LNA con las ANC relevantes son las principales estaciones que pueden comunicarse entre sí. MAUs están subordinados a estaciones, que requieren una estación principal para ser capaz de comunicarse con otras estaciones subordinadas. Sin embargo, un MAU puede comenzar a transferir en cualquier momento sin el permiso de la estación central. Así MITS no se comporta en este caso como un protocolo típico de de un mensaje principal subordinatetype. Típicamente, la topología de una red MiTs es un autobús porque los nodos por lo general tienen una MAU para cada LNA. Sin embargo, si las redes MITS tienen sólo un LNA, se define como una topología en estrella, donde todos MAU (aunque son diferentes nodos) están conectados a LNA utilizando este punto a punto conexiones.")
13
Aviación y el Espacio Las Redes industriales también tienen aplicación en el área de la aviación y vehículos espaciales, aunque no tan fuerte como en otras áreas. Uno de los protocolos que se destaca más claramente en estas aplicaciones es MIL-STD 1553B (militares STDandard 1553B). Este protocolo es un bus serie de datos destinados a ser utilizados en sistemas militares, principalmente en aviones. Se utiliza un protocolo de comando / respuesta que proporciona una respuesta a un pedido en un plazo determinado. Tiene una alta resistencia al ruido y la posibilidad adicional de buses. Esta es una red industrial que garantiza una comunicación de alta fiabilidad, que es un requisito fundamental para aeronaves y embarcaciones especiales donde un error o demora de la transmisión de datos puede ser fatal. Los dispositivos de un bus MIL-STD 1553B pueden operar como Bus Controller (BC), Terminal remoto (RT), o Bus Monitor (BM). BC y RT puede recibir y enviar información al bus mientras que los dispositivos BM sólo reciben. Este protocolo permite la comunicación entre AC y RT, RT y RT y RT y BC. También incluye la comunicación en el modo de difusión. Todas las transferencias de bus se producen a petición de un BC activo, aunque esto BC es ni el origen ni el objetivo de los datos. La estructura de la red puede ser con un controlador de bus único o muchos controladores de bus, aunque puede haber sólo uno activo en un momento dado. La transferencia de control de un AC a otro se puede hacer por petición donde la AC activa pregunta a otro potencial BC antes de pasar a la funcionalidad de la principal estación activa o el establecimiento de una secuencia de round-robin. En la última opción, la funcionalidad de la estación principal activa se transmite entre los controladores de bus en un orden predeterminado, y después de un período fijo de tiempo. Los mensajes deben ser identificados antes de un período específico de tiempo. Por ejemplo, el controlador de bus activo envía una palabra comando que contiene la dirección de destino y ocho contadores de datos y la siguiente acción es enviar la palabra de datos. La terminal de la estación remota debe responder dentro del tiempo especificado, con un mensaje que indica el estado de los datos (palabra de estado). Los mensajes enviados consisten en 20 bits. Hay tres tipos de mensajes: comando, datos y estado. El tipo de mensaje se identifica por los tres primeros bits del mensaje, que también se utilizan como bits de sincronización. El último bit es un bit de parada para el control de errores en la transmisión del mensaje. La codificación utilizada en el nivel físico es el Manchester. Para los bits de sincronización usamos violaciones de código para lograr cartuchos únicos que no se pueden repetir en ningún otro lugar en el mensaje.
. Este protocolo es un bus serie de datos destinados a ser utilizados en sistemas militares, principalmente en aviones. Se utiliza un protocolo de comando / respuesta que proporciona una respuesta a un pedido en un plazo determinado. Tiene una alta resistencia al ruido y la posibilidad adicional de buses. Esta es una red industrial que garantiza una comunicación de alta fiabilidad, que es un requisito fundamental para aeronaves y embarcaciones especiales donde un error o demora de la transmisión de datos puede ser fatal. Los dispositivos de un bus MIL-STD 1553B pueden operar como Bus Controller (BC), Terminal remoto (RT), o Bus Monitor (BM). BC y RT puede recibir y enviar información al bus mientras que los dispositivos BM sólo reciben. Este protocolo permite la comunicación entre AC y RT, RT y RT y RT y BC. También incluye la comunicación en el modo de difusión. Todas las transferencias de bus se producen a petición de un BC activo, aunque esto BC es ni el origen ni el objetivo de los datos. La estructura de la red puede ser con un controlador de bus único o muchos controladores de bus, aunque puede haber sólo uno activo en un momento dado. La transferencia de control de un AC a otro se puede hacer por petición donde la AC activa pregunta a otro potencial BC antes de pasar a la funcionalidad de la principal estación activa o el establecimiento de una secuencia de round-robin. En la última opción, la funcionalidad de la estación principal activa se transmite entre los controladores de bus en un orden predeterminado, y después de un período fijo de tiempo. Los mensajes deben ser identificados antes de un período específico de tiempo. Por ejemplo, el controlador de bus activo envía una palabra comando que contiene la dirección de destino y ocho contadores de datos y la siguiente acción es enviar la palabra de datos. La terminal de la estación remota debe responder dentro del tiempo especificado, con un mensaje que indica el estado de los datos (palabra de estado). Los mensajes enviados consisten en 20 bits. Hay tres tipos de mensajes: comando, datos y estado. El tipo de mensaje se identifica por los tres primeros bits del mensaje, que también se utilizan como bits de sincronización. El último bit es un bit de parada para el control de errores en la transmisión del mensaje. La codificación utilizada en el nivel físico es el Manchester. Para los bits de sincronización usamos violaciones de código para lograr cartuchos únicos que no se pueden repetir en ningún otro lugar en el mensaje..")
14
Los dispositivos de asistencia para personas con discapacidades M3S (Maestro Múltiple Esclavo Múltiple) es un sistema de comunicaciones diseñada por las empresas y las instituciones europeas para acceder a varios dispositivos técnicos para ayudar a las personas con discapacidad. Su principal campo de aplicación es la silla de ruedas para las personas con discapacidad, a las que se añaden dispositivos adicionales (brazo robótico, motores, botones de control, teclado, pantalla, etc.), que ayudan a las personas a mejorar su calidad de vida. En una arquitectura estándar basada en el protocolo CAN cada mensaje comienza con un identificador de 11 bits. El método para el acceso al bus es la declaración (CSMA / CD), implementado por el arbitraje para la cual se utilizan los bits que identifican. Para la depuración de una zona de redundancia cíclica de 15 bits se puede utilizar (CRC, Cyclic Redundancy Check). El bus cuenta con dos líneas de comunicación digitales (bus CAN), 2 líneas de alimentación de los dispositivos y dos líneas de control de seguridad. El sistema M3S incluye aspectos adicionales para aumentar la seguridad e integridad de las estaciones como llave y un DMS (Dead Man Switch). La llave puede ser activada por el usuario o su asistente y permite el arranque y la parada del sistema. Se permite el apagado completo en el caso de un uso de emergencia. El uso de DMS. es apropiado cuando el control de dispositivos puede afectar a la seguridad del usuario Este tipo de gestión requiere una acción continua de usuario para el control del dispositivo de modo que si hay un problema el sistema se detiene hasta que el usuario suelta el botón. El sistema de M3S consiste en un conjunto de dispositivos que se clasifican en tres tipos: - Dispositivos de control y configuración: Logran el buen funcionamiento del sistema - (transceptores). - Dispositivos de entrada: Son utilizados por el usuario para enviar sus deseos al sistema (control de mando, teclado, voz sistemas de reconocimiento, interruptores, etc) .. - Los dispositivos de salida: Se llevan a cabo las acciones solicitadas por el usuario (brazo robótico, TV, luces, control de seguridad, motor, etc) .. - dispositivos intermedios: una combinación de dispositivos de entrada y salida (escáner, navegador web, etc.)
, que ayudan a las personas a mejorar su calidad de vida. En una arquitectura estándar basada en el protocolo CAN cada mensaje comienza con un identificador de 11 bits. El método para el acceso al bus es la declaración (CSMA / CD), implementado por el arbitraje para la cual se utilizan los bits que identifican. Para la depuración de una zona de redundancia cíclica de 15 bits se puede utilizar (CRC, Cyclic Redundancy Check). El bus cuenta con dos líneas de comunicación digitales (bus CAN), 2 líneas de alimentación de los dispositivos y dos líneas de control de seguridad. El sistema M3S incluye aspectos adicionales para aumentar la seguridad e integridad de las estaciones como llave y un DMS (Dead Man Switch). La llave puede ser activada por el usuario o su asistente y permite el arranque y la parada del sistema. Se permite el apagado completo en el caso de un uso de emergencia. El uso de DMS. es apropiado cuando el control de dispositivos puede afectar a la seguridad del usuario Este tipo de gestión requiere una acción continua de usuario para el control del dispositivo de modo que si hay un problema el sistema se detiene hasta que el usuario suelta el botón. El sistema de M3S consiste en un conjunto de dispositivos que se clasifican en tres tipos: - Dispositivos de control y configuración: Logran el buen funcionamiento del sistema - (transceptores). - Dispositivos de entrada: Son utilizados por el usuario para enviar sus deseos al sistema (control de mando, teclado, voz sistemas de reconocimiento, interruptores, etc) .. - Los dispositivos de salida: Se llevan a cabo las acciones solicitadas por el usuario (brazo robótico, TV, luces, control de seguridad, motor, etc) .. - dispositivos intermedios: una combinación de dispositivos de entrada y salida (escáner, navegador web, etc.).")
Presentaciones similares
















>")


