Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Ricardo Rafael Zarate Aima
Pre-Tesis Método para Obtener Planes de Tiempo Semafóricas Óptimos En Intersecciones Congestionadas Ricardo Rafael Zarate Aima

2
Pre-Tesis Esta tesis se presenta para obtener el titulo de Grado en la UNI. El contexto de la tesis son los sistemas de transito vehicular. Se hará uso de técnicas de investigación operativa, algoritmos genéticos.

3
Estructura Introducción Planteamiento del Problema
Revisión de Bibliografía Modelo de Solución Método Propuesto Experimentación Plan de Trabajo Glosario

4
Introducción Los sistemas de transito sufren de insuficiente capacidad vial La congestión Más consumo de combustible Más tiempo de viaje Más contaminación El modelo y método propuesto

5
Introducción Propuestas actuales: Inversión en Infraestructura Vial
Restructuración de Vías Sistemas Inteligentes Optimización de Ciclos Semafóricos.

6
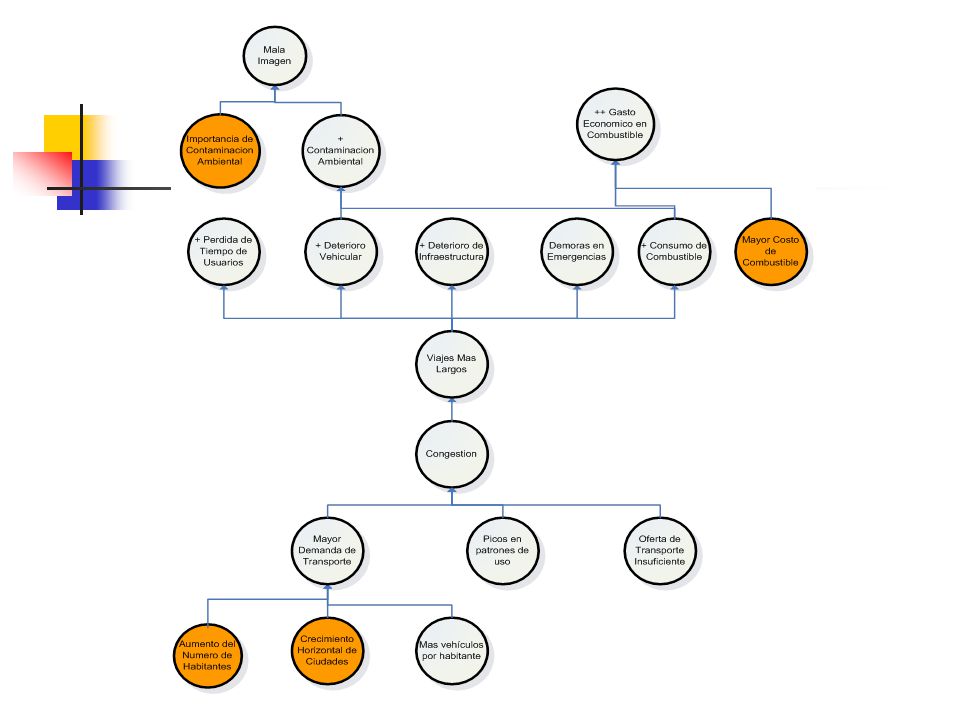
La situación problemática
Factores Externos Aumento del numero de habitantes Crecimiento horizontal de las ciudades Mayor costo del combustible Mayor importancia de la Contaminación Ambiental El aumento del numero de vehículos por habitante Cambios en los patrones de uso de automóviles

8
El Problema “Como desarrollar un método que implementado sobre un subconjunto congestionado del sistema de transito de una ciudad sirva para aumentar el flujo vehicular y disminuir la desviación estándar de tiempos de espera por vehículos“

9
Objetivos Aumentar la oferta de transito vehicular
Desarrollar el método y modelo a aplicar. Desarrollar un software que automatice los pasos requeridos por el método. Revisar los métodos existentes en la actualidad. Simular escenarios y comparar los resultados de los métodos actuales vs. El método propuesto. Aplicar el método en un escenario real

10
Justificación El sistema de transito tiene una gran importancia económica y social. Ejemplo: Una persona pierde entre 3 y 4 horas al día viajando en Transporte Público (por los altos niveles de congestión), lo que representa 44 días al año que en otras palabras implica que un Ciudadano de Lima pierde 7 años de su vida en Transporte Público
, lo que representa 44 días al año que en otras palabras implica que un Ciudadano de Lima pierde 7 años de su vida en Transporte Público.")
11
Alcances, Limitaciones
En la primera fase solo se probara el método en un ambiente simulado. El sistema de transito opera bajo parámetros y condiciones usuales. El sistema analizado presenta efectos de la congestión.

12
Marco Teórico Conceptual
La base teórica conceptual de esta tesis incluye los siguientes temas: Teoría del Trafico Sistemas de Control de Semáforos Tecnologías Actuales aplicadas al Trafico

13
Teoría del Tráfico Variables Densidad Flujo Velocidad Ocupancia

14
Teoría del Tráfico

15
Teoría del Tráfico Diagrama Fundamental del Flujo:
A mayor densidad vehicular se tiene menor velocidad media. Para prevenir la congestión el número de vehículos que ingresa a la vía debe ser igual al número de vehículos que sale de esta. A cierta densidad critica y cierta velocidad critica el flujo pasa de estable a inestable. Si un vehículo frena abruptamente en un flujo inestable se pasara a la congestión.

16
Teoría del Tráfico Estados de un Flujo Flujo Libre Flujo Inestable
Congestión

17
Sistemas de Control de Semáforos
Objetivos Maximizar el flujo vehicular total Disminuir la probabilidad de accidentes Ser equitativo en los tiempos de espera de los carros y peatones (No esperas excesivas) Considerar ambulancias y otros vehículos prioritarios
 Considerar ambulancias y otros vehículos prioritarios.")
18
Sistemas de Control de Semáforos
Controles de Tiempo Fijo Controles Dinámicos Controles Coordinados Controles Actuados Controles Inteligentes

19
Controles de Tiempo Fijo
Usan tiempos fijos en los semáforos para señalizar el tiempo y el sentido. Características Simples Probados Flexibles

20
Controles Dinámicos Es una mejora del control de tiempo fijo.
Usan sensores para no dar luz verde a carriles vacíos. Tipos de Sensores: Electromagnéticos Inducción Magnética Video Acusticos

21
Controles Coordinados
Se coordinan un grupo de semáforos mediante cierto esquema y algoritmo de control. Mas conocido: OLA VERDE Características: Altas velocidades Probado con alto éxito No sirve en congestión

22
Ola Verde Efecto producido en una avenida donde los semáforos están en un sincronismo tal que los vehículos que circulan por ella siempre encuentran luz verde. Reduce Tiempos de Circulación Optimiza Uso de Avenidas

23
Esquemas de Coordinación
Esquema Maestro - Control Local Esquema En Cadena Esquema Central de Tráfico, Controles Maestros y locales Esquema Central de Trafico y controles encadenados

24
Esquemas de Coordinación

25
Controles Actuados Aquellos en los que los peatones deben de presionar un botón para obtener una luz de pase. Son simples pero ya obsoletos

26
Controles Inteligentes
Estos controles utilizan técnicas de inteligencia artificial para controlar el flujo en una o varias intersecciones. Entre otras cosas usan: Heurísticas Optimización Agentes

27
Simulación de Sistemas de Transito
Tipos Microscópico Mesoscópico Macroscópico

28
Simulación de Sistemas de Transito
Cuando se debe usar: No se puede analizar matemáticamente. Modelo matemático poco realista. Situaciones de congestión prolongadas. Para entender gráficamente

29
Marco Teórico Instrumental
Esquemas de Control Actuales Control de Intersección Aislado Coordinación en Base al Tiempo Control Interconectado Control de Trafico Ajustado Control de Trafico Reactivo Control de Trafico Adaptativo

30
Antecedentes Intelligent Traffic Control Caso: Las Ramblas
Self-Organizing Traffic Lights SCOOT SCATS

31
Revisión de Antecedentes
Modelo de Solución Revisión de Antecedentes Diseño de Prototipo Experimentación Análisis de Resultados Técnicas Resultados Experimentales Prototipo Variables Dependientes H

32
Método Propuesto Es un sistema de control coordinado
Se aplica sobre una zona cuyos flujos son predecibles. Para situaciones de congestión e intersecciones semaforizadas.

33
El Sistema

34
Método Propuesto Pasos Seleccionar una zona
Definir nodos origen, destino y semáforos. Definir los flujos del sistema Determinar las fases Determinar la secuencia de fases Determinar los planes de tiempo específicos

35
La Herramienta Es un software que sirve para poner en práctica el método propuesto. Desarrollado en Java Se hace uso de algoritmos genéticos para la optimización y grafos para hallar el plan de tiempo. Procesa archivos en formato texto.

36
La Herramienta Funcionalidades:
Registro de Flujos, Nodos, Semáforos, Fases, Secuencias, Relaciones. Optimización de Planes de Tiempo Generación de Fases Posibles en base a relaciones existentes.

37
Diagrama de Clases

38
Diagrama de Clases

39
El Synchro Es un software de micro simulación de sistemas de transito vehicular. Posee una implementación de los métodos para determinar planes de tiempo según la HCM y el método Synchro6.

40
Diseño de Experimento Objeto de Investigación: Población
El sistema de control de transito, el cual es un subsistema del sistema de transito. Población La población esta formada un grupo de 24 sistemas de control de transito producto de aplicar 2 métodos distintos a 12 escenarios distintos.

41
Hipótesis En una simulación se comparará el método propuesto (M0) versus el Synchro-6 (M1) . H0: Fsalida(M0) > Fsalida (M1) H1: Delay(M0) < Delay (M1)
 < Delay (M1)")
42
Variables Dependientes: Independientes Flujo de Salida Delay Total
Escenario Método de Control

43
Escenarios Se tomaran en cuenta 3 escenarios base. Para la definición de cada escenario se considera: Descripción del Escenario Base Geometría del Escenario (Nodos, Nro. De carriles, forma del escenario) Señales de Control Composición y Características del Tráfico (Velocidad Media, # de Buses, etc.) Consideraciones adicionales
 Señales de Control. Composición y Características del Tráfico (Velocidad Media, # de Buses, etc.) Consideraciones adicionales.")
44
Escenario Básico Geometría del Escenario
La forma del escenario y los 8 nodos numerados.

45
Escenario Básico

46
Escenario Básico Señales de Control:
S2.3 (El semáforo en la intersección 3 que controla el flujo originado en 2) S4.3/S3.1/S8.1 Composición y Características del Tráfico Solo se considera el flujo de vehículos y no el peatonal. La proporción de carros pesados es de 10% del total. La velocidad de los vehículos es de 50km/hr.
 S4.3/S3.1/S8.1. Composición y Características del Tráfico. Solo se considera el flujo de vehículos y no el peatonal. La proporción de carros pesados es de 10% del total. La velocidad de los vehículos es de 50km/hr.")
47
Escenario 2 Esta basado en el cruce de las avenidas 28 de Julio, Petit Thouars, Arequipa y Wilson.

48
Escenario 2

49
Resultados – Escenario Basico

50
Resultado – Escenario 28 de Julio

51
Conclusiones El método de optimización del plan de tiempo Synchro6 obtuvo un mayor flujo promedio en el primer escenario que el método propuesto y menores delay. La diferencia en las 3 primeras ejecuciones fue minima, pero en la cuarta fue considerable. En el segundo caso, sin embargo, el método propuesto obtuvo un flujo 40% mayor que el Synchro6. Se observo que esta diferencia se debía a que el método propuesto dio mucha más importancia a los flujos proveniente de la Av. Petit Thouars y 28 de Julio en desmedro del flujo que venia de la Av. Arequipa. Se observa dependencia entre el delay y el flujo en los casos ejecutados. A mayor flujo corresponde un menor delay. En el 83% de ejecuciones realizadas se observo que el método propuesto tenia menor varianza en el flujo entre las ejecuciones. En el segundo caso considerado se observo un mucho mayor delay, esto debido a la situación de alta congestión que se propuso. En promedio el método Synchro6 permitió un flujo 6% mayor que el método propuesto en el primer escenario.

Presentaciones similares









>")
>")








