Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Jorge Muñoz Alejandro Lumbier

2
Contenido

3
Motivación Indagar en que aportación se hace desde la robótica para mejorar la forma de desenvolverse de una persona que sufre ceguera Ver si es viable sustituir un perro lazarillo por un Robot

4
Objetivos Buscar y estudiar distintos Robots dirigidos a mejorar la calidad de vida de las personas ciegas Analizar las distintas líneas de trabajo que se han seguido en los últimos años Dar nuestra opinión personal sobre estos dispositivos

5
RG-I Ideado para asistir a ciegos en los supermercados Sensores de posición y de detección Programado para indicar en que pasillo esta, así como los productos cercanos

6
RG-I

7
Maggie Presentado como un robot para ciegos capaz de sentir cosquillas o distinguir medicinas Móvil Múltiples sensores Reconocimiento de voz

8
EI-E Georgia Institute of Technology Copia las acciones de los perros lazarillo Reconocimiento de la voz Guía mediante puntero laser Acciones: Abrir cerrar puertas Trasportar objetos Poner el microondas

9
EI-E

10
InvigBot (pfc en UMA) Función: Lazarillo Robot Móvil: Tres patas Sonar (ultrasonidos) Capacidades: Movimiento Autónomo independiente Según el obstáculo emite distintos pitidos Trayectoria??
 Función: Lazarillo Robot Móvil: Tres patas Sonar (ultrasonidos) Capacidades: Movimiento Autónomo independiente Según el obstáculo emite distintos pitidos Trayectoria")
11
Visguide Función: Lazarillo Cooperación Neurociencia y robótica Red neuronal artificial Conexionado basado en el cerebro humano Proyecto europeo: Decisions-In-Motion VisGuide Robot móvil para invidentes Casco para invidentes

12
Markovito (inaoe, Méjico) Función: Lazarillo, tercera edad, servicio. Robot móvil : 2 ruedas motoras 2 Sonar Láser Infrarrojo Micrófono Altavoces Cámara (2 en un futuro)
.")
13
Markovito Capacidades Creación de mapas Navegación Seguimiento Reconocimiento de caras y objetos Reconocimiento y síntesis de voz

14
ROVI ( Univ. Malasia Perlis) Función: Lazarillo Robot móvil: 2 ruedas 9 x Sonar (ultrasonidos) Capacidades: Trayectoria con Goal predefinido Evita obstáculos
 Función: Lazarillo Robot móvil: 2 ruedas 9 x Sonar (ultrasonidos) Capacidades: Trayectoria con Goal predefinido Evita obstáculos.")
15
ROVI ( Univ. Malasia Perlis) Posibles mejoras GPS Detección de hoyos Navegación en interiores
 Posibles mejoras GPS Detección de hoyos Navegación en interiores")
16
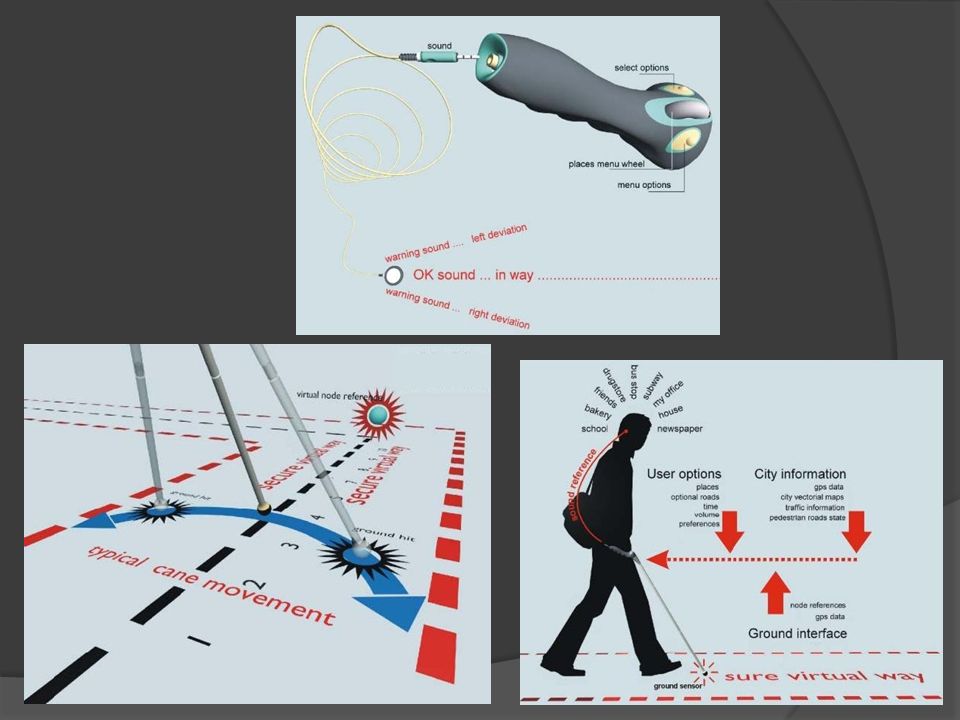
Bastones Función del bastón común al que se le han agregado sensores Se necesita un aprendizaje Baratos Algunos modelos: MyMap Mygo GuideCane Tom Puce y Teletacto

18
Bastones

19
SWAN (Georgia Institute of Technology) Función: Lazarillo Robot Vestible: Cámara Auriculares GPS Inerciales Podómetro Brújula Sensores de radiofrecuencia
 Función: Lazarillo Robot Vestible: Cámara Auriculares GPS Inerciales Podómetro Brújula Sensores de radiofrecuencia")
20
SWAN Capacidades Guiado a través de Trayectorias Predefinidas Posición y reconocimiento de objetos Posición y reconocimiento de objetos Cambios en la superficie del suelo Lugares especiales

21
ViDeT (Univ. de Bolonia) sin cambios desde el año 2000 Función: Reconocimiento de objetos Robot Vestible: 2 cámaras Dispositivo Háptico Capacidades: Reconocimiento de objetos
 sin cambios desde el año 2000 Función: Reconocimiento de objetos Robot Vestible: 2 cámaras Dispositivo Háptico Capacidades: Reconocimiento de objetos.")
22
Cuestiones Como o quién actualiza el goal en el robot??

23
Conclusiones Tienen un gran potencial Queda bastante por mejorarse

Presentaciones similares


>")



 Función: Lazarillo Robot Móvil: Tres patas Sonar (ultrasonidos) Capacidades: Movimiento Autónomo.>")












