Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tema 5 Contraste práctico del Método Clásico y los Métodos de Estimación Robusta propuestos

2
Orientación Relativa Numérica : Orientación Relativa Numérica : Programa Base (Ecs. de Colinearidad ) Programa Base (Ecs. de Colinearidad ) Subrutina 1 de Estimación Robusta : Subrutina 1 de Estimación Robusta : Mínima SumaMínima Suma Subrutina 2 de Estimación Robusta : Subrutina 2 de Estimación Robusta : M. Danés Modificado 1M. Danés Modificado 1 Subrutina 3 de Estimación Robusta : Subrutina 3 de Estimación Robusta : M. De HuberM. De Huber
 Programa Base (Ecs. de Colinearidad ) Subrutina 1 de Estimación Robusta : Subrutina 1 de Estimación Robusta : Mínima SumaMínima Suma Subrutina 2 de Estimación Robusta : Subrutina 2 de Estimación Robusta : M. Danés Modificado 1M. Danés Modificado 1 Subrutina 3 de Estimación Robusta : Subrutina 3 de Estimación Robusta : M. De HuberM. De Huber.")
3
Transformación Tridimensional de Semejanza : Transformación Tridimensional de Semejanza : Programa Base (Orientación Absoluta Analítica ) Programa Base (Orientación Absoluta Analítica ) Subrutina 1 de Estimación Robusta : Subrutina 1 de Estimación Robusta : Mínima Suma Modif. + M. de HuberMínima Suma Modif. + M. de Huber Subrutina 2 de Estimación Robusta : Subrutina 2 de Estimación Robusta : M. Danés Modificado 2M. Danés Modificado 2 Subrutina 3 de Estimación Robusta : Subrutina 3 de Estimación Robusta : Estimador de Geman& Mc-ClureEstimador de Geman& Mc-Clure

4
Formación y Cálculo de la Banda : Formación y Cálculo de la Banda : Programa Base (Modelos Independientes ) Programa Base (Modelos Independientes ) Subrutina 1 de Estimación Robusta : Subrutina 1 de Estimación Robusta : Método Danés Modificado 3Método Danés Modificado 3
 Programa Base (Modelos Independientes ) Subrutina 1 de Estimación Robusta : Subrutina 1 de Estimación Robusta : Método Danés Modificado 3Método Danés Modificado 3")
5
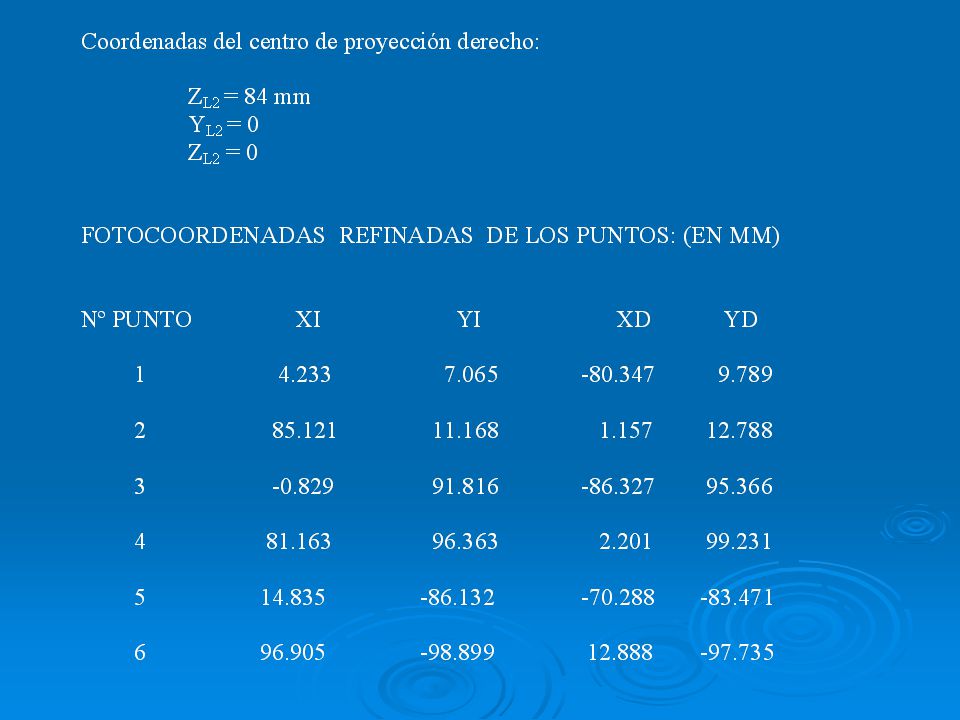
CONJUNTOS DE DATOS FOTOGRAMÉTRICOS UTILIZADOS EN EL PROBLEMA DE LA ORIENTACIÓN RELATIVA

10
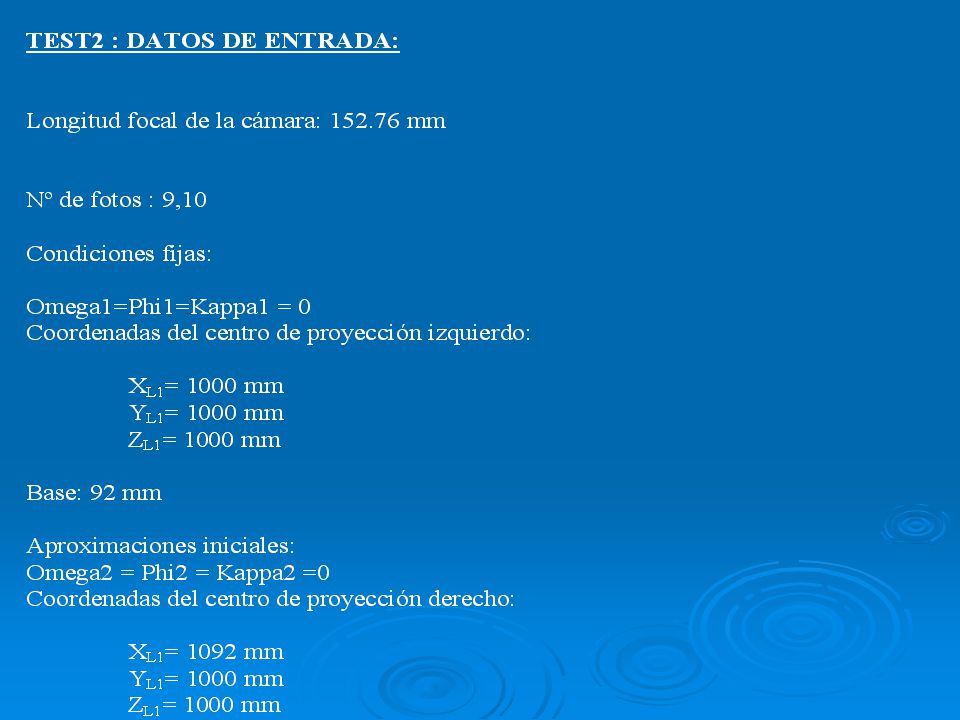
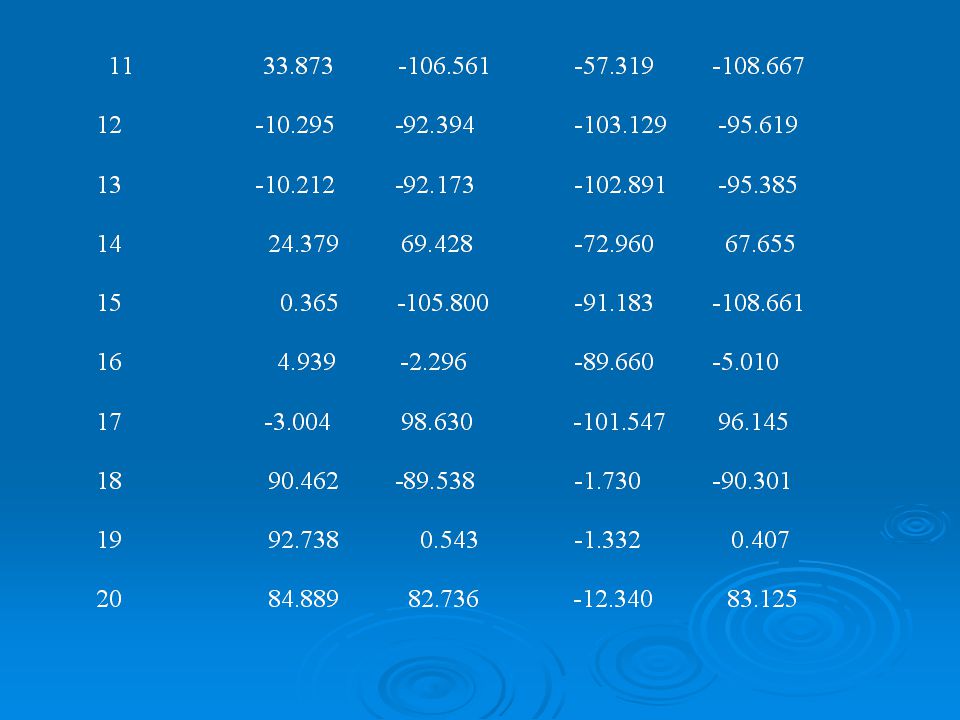
CONJUNTOS DE DATOS FOTOGRAMÉTRICOS UTILIZADOS EN EL PROBLEMA DE LA ORIENTACIÓN ABSOLUTA ANALÍTICA

11
ESQUEMA DE LAS SIMULACIONES REALIZADAS CON LOS DATOS : ERRORES EN LAS FOTOCOORDENADAS ORIENTACIÓN RELATIVA ANALÍTICA ESQUEMA DE LAS SIMULACIONES REALIZADAS CON LOS DATOS : ERRORES EN LAS FOTOCOORDENADAS ORIENTACIÓN RELATIVA ANALÍTICA PLACA IZQUIERDA PLACA IZQUIERDA PLACA DERECHA

12
ESQUEMA DE LAS SIMULACIONES REALIZADAS CON LOS DATOS : ERRORES EN LAS COORDENADAS ORIENTACIÓN ABSOLUTA NUMÉRICA COORDS. MODELO COORDS. MODELO COORDS. TERRENO

13
ESQUEMA DE LAS SIMULACIONES REALIZADAS CON LOS DATOS : ERRORES EN LAS COORDENADAS MODELO FORMACIÓN DE LA BANDA FOTOGRAMÉTRICA COORDS. MODELO COORDS. MODELO C. DE PROYECCIÓN

14
ERRORES EN TRES FOTOCOORDENADAS.PLACA DERECHA. PUNTOS : 2, 8, 14. ERROR: 80 MICRAS MMCC MÍNIMA SUMA

15
ERRORES EN SEIS FOTOCOORDENADAS. PLACA DERECHA PUNTOS : 2,6,8,14,18,19. ERROR : 80 MICRAS MMCC MÍNIMA SUMA

16
ERRORES EN DOS FOTOCOORDENADAS. PLACA DERECHA PUNTOS : 1, 4. ERROR : 70 MICRAS MMCC M. DANÉS MOD.

17
ERRORES EN DOS FOTOCOORDENADAS.PLACA IZQDA. ERROR : -60 MICRAS. PUNTOS: 1, 4 MMCC M. DANÉS MOD.

18
ORIENTACIÓN ABS. NUMÉRICA.ERROR PLANIMÉTRICO PUNTOS : 3,5,10,11 ERROR: -20, 10, 20, 10 METROS MMCCM. DANÉS

19
ORIENTACIÓN ABS. NUMÉRICA(ERROR ALTIMÉTRICO) PUNTOS: 1,3,5 ERROR : 40, -30, 40 METROS MMCC M. DANÉS
 PUNTOS: 1,3,5 ERROR : 40, -30, 40 METROS MMCC M. DANÉS")
20
ORIENTACIÓN ABSOLUTA NUMÉRICA( ERROR XYZ ) PUNTOS: 1, 3. ERRORES : 40 Y -30 METROS MMCC GEMAN&MCCLURE ORIENTACIÓN ABSOLUTA NUMÉRICA( ERROR XYZ ) PUNTOS: 1, 3. ERRORES : 40 Y -30 METROS MMCC GEMAN&MCCLURE
 PUNTOS: 1, 3. ERRORES : 40 Y -30 METROS MMCC GEMAN&MCCLURE.")
21
ORIENTACIÓN ABS. NUMÉRICA.ERROR PLANIMÉTRICO PUNTOS : 2 Y 4. ERRORES : 40 METROS MMCC GEMAN&MCCLURE

22
ORIENTACIÓN ABS. NUMÉRICA.ERROR ALTIMÉTRICO PUNTOS : 1,2,8,9. ERRORES : 30, -30,-40,30 METROS MMCC GEMAN&MCCLURE ORIENTACIÓN ABS. NUMÉRICA.ERROR ALTIMÉTRICO PUNTOS : 1,2,8,9. ERRORES : 30, -30,-40,30 METROS MMCC GEMAN&MCCLURE

23
FORMACIÓN DE LA BANDA A PARTIR DE MODELOS INDEPENDIENTES (ERROR XY EN UN PUNTO DISTINTO AL C. DE PROYECCIÓN) ERROR: + 20 mm PUNTO : 2 ERROR: + 20 mm PUNTO : 2
 ERROR: + 20 mm PUNTO : 2 ERROR: + 20 mm PUNTO : 2.")
24
FORMACIÓN DE LA BANDA A PARTIR DE MODELOS INDEPENDIENTES (ERROR XY EN C. DE PROYECCIÓN) ERROR: -10 mm PUNTO : L1 ERROR: -10 mm PUNTO : L1
 ERROR: -10 mm PUNTO : L1 ERROR: -10 mm PUNTO : L1.")
25
FORMACIÓN DE LA BANDA A PARTIR DE MODELOS INDEPENDIENTES (ERROR Z EN C. DE PROYECCIÓN) ERROR: 10 mm PUNTO : L1 ERROR: 10 mm PUNTO : L1
 ERROR: 10 mm PUNTO : L1 ERROR: 10 mm PUNTO : L1.")
26
FORMACIÓN DE LA BANDA A PARTIR DE MODELOS INDEPENDIENTES ( ERROR XY EN DOS PUNTOS ) ERROR: -10 mm PUNTOS : 3 Y 5 ERROR: -10 mm PUNTOS : 3 Y 5
 ERROR: -10 mm PUNTOS : 3 Y 5 ERROR: -10 mm PUNTOS : 3 Y 5")
27
FORMACIÓN DE LA BANDA A PARTIR DE MODELOS INDEPENDIENTES ( ERROR Z EN TRES PUNTOS ) ERROR: - 10, 20 Y -10 mm PUNTOS : 2, 4 Y 6 ERROR: - 10, 20 Y -10 mm PUNTOS : 2, 4 Y 6
 ERROR: - 10, 20 Y -10 mm PUNTOS : 2, 4 Y 6 ERROR: - 10, 20 Y -10 mm PUNTOS : 2, 4 Y 6")
28
ALGUNAS CONCLUSIONES INTERESANTES ALGUNAS CONCLUSIONES INTERESANTES Orientación Relativa Analítica: Orientación Relativa Analítica: Orientación Absoluta Numérica Orientación Absoluta Numérica Formación de la Banda (Modelos Independientes) Formación de la Banda (Modelos Independientes)
 Formación de la Banda (Modelos Independientes)")
29
Orientación Relativa Analítica: Orientación Relativa Analítica: Mayor eficiencia observada: M. Danés Modificado Mayor eficiencia observada: M. Danés Modificado Nº de iteraciones menor Nº de iteraciones menor Magnitud del residuo Error simulado Magnitud del residuo Error simulado Incremento de las paralajes en todos los ptos. del modelo Incremento de las paralajes en todos los ptos. del modelo Detección de más de dos puntos erróneos Detección de más de dos puntos erróneos Intervalo de Detección : Errores > 15 micras Intervalo de Detección : Errores > 15 micras

30
Orientación Absoluta Numérica : Orientación Absoluta Numérica : Mayor eficiencia observada: M. Danés Modificado + Estimador de Geman & McClure Mayor eficiencia observada: M. Danés Modificado + Estimador de Geman & McClure Nº de iteraciones menor Nº de iteraciones menor Residuos planimétricos y altimétricos Errores simulados en magnitud y signo Residuos planimétricos y altimétricos Errores simulados en magnitud y signo Detección de más de dos puntos erróneos (XY y/o Z) Detección de más de dos puntos erróneos (XY y/o Z) Intervalo de Detección :Planimetría (Altimetría) Intervalo de Detección :Planimetría (Altimetría) 1(5) m < Errores < 600(100) m 1(5) m < Errores < 600(100) m
 Detección de más de dos puntos erróneos (XY y/o Z) Intervalo de Detección :Planimetría (Altimetría) Intervalo de Detección :Planimetría (Altimetría) 1(5) m < Errores < 600(100) m 1(5) m < Errores < 600(100) m.")
31
Formación de la Banda Fotogramétrica : Formación de la Banda Fotogramétrica : Mayor eficiencia observada: M. Danés Modificado Mayor eficiencia observada: M. Danés Modificado Conclusiones similares a las anteriores Conclusiones similares a las anteriores Detección de los errores simulados en magnitud y signo en el Centro de Proyección Detección de los errores simulados en magnitud y signo en el Centro de Proyección Detección de errores en casos de redundancia mínima ( 3 puntos erróneos de un total de 6) Detección de errores en casos de redundancia mínima ( 3 puntos erróneos de un total de 6) Límite inferior de detección : Errores de 3 a 5 mm en las coordenadas modelo Límite inferior de detección : Errores de 3 a 5 mm en las coordenadas modelo
 Detección de errores en casos de redundancia mínima ( 3 puntos erróneos de un total de 6) Límite inferior de detección : Errores de 3 a 5 mm en las coordenadas modelo Límite inferior de detección : Errores de 3 a 5 mm en las coordenadas modelo.")
32
ALGUNAS CONCLUSIONES DE CARÁCTER GENERAL SOBRE LOS RESULTADOS OBTENIDOS

34
METODOLOGÍA DE CARÁCTER GENERAL CON ESTIMACIÓN ROBUSTA

35
5)Elección de las observaciones a realizar, y dado el carácter experimental de la investigación, elección de un número de ellas tal que la redundancia sea suficientemente grande 6)Resolución del problema utilizando el método clásico de ajuste y observación de la magnitud de los residuos obtenidos. NOTA: Si el problema estudiado, requiere un proceso iterativo, elegir adecuadamente un método de detención de dicho proceso, (por ejemplo basado en tolerancias) 7) Proceso de simulación de errores de las magnitudes esperables en las observaciones, considerando todos los casos que se puedan presentar. 8)Análisis detallado de los residuos obtenidos así como de la varianza o la desviación estándar a posteriori del ajuste
 7) Proceso de simulación de errores de las magnitudes esperables en las observaciones, considerando todos los casos que se puedan presentar. 8)Análisis detallado de los residuos obtenidos así como de la varianza o la desviación estándar a posteriori del ajuste.")
36
9)Elección del método o métodos robustos como alternativas al método clásico. Estudio de las funciones objetivo, de influencia y de pesos correspondientes al método y posible aplicación al problema elegido. 10)Construcción de la función de pesos y aplicación al proceso de ajuste según los pasos expuestos. 11)Ejecución de todas las simulaciones precisas de errores en las observaciones para la definición final del método robusto. Si es necesario planteamiento de varios métodos robustos y confrontación de todos ellos en los casos más problemáticos. 12)Depuración final del programa de estimación robusta y comprobaciones con diversos conjuntos de datos
Construcción de la función de pesos y aplicación al proceso de ajuste según los pasos expuestos. 11)Ejecución de todas las simulaciones precisas de errores en las observaciones para la definición final del método robusto. Si es necesario planteamiento de varios métodos robustos y confrontación de todos ellos en los casos más problemáticos. 12)Depuración final del programa de estimación robusta y comprobaciones con diversos conjuntos de datos.")
Presentaciones similares











>")







 BOLETÍN 5020>")
