Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Palancas (maquinas simples)
")
2
Las máquinas simples se usan, normalmente, para compensar una fuerza resistente o levantar un peso en condiciones más favorables. Es decir, realizar un mismo trabajo con una fuerza aplicada menor. Esta ventaja mecánica comporta tener que aplicar la fuerza a lo largo de un recorrido (lineal o angular) mayor. Además, hay que aumentar la velocidad para mantener la misma potencia.
 mayor. Además, hay que aumentar la velocidad para mantener la misma potencia..")
3
En las máquinas simples se distingue siempre:
La potencia que es la fuerza aplicada y se simboliza por P La Resistencia es la fuerza que se debe vencer, y se representa por R

4
Una palanca es un ejemplo de máquina simple
Una palanca es un ejemplo de máquina simple. Una palanca es una barra que se mueve sobre un punto fijo. Todas las palancas tienen tres partes: la carga, el punto de apoyo y la fuerza. La fuerza es el empuje o la atracción que mueve la palanca. El punto de apoyo es el punto sobre el que gira la palanca. La carga es el objeto que se mueve.

5
La fuerza pequeña se denomina "potencia" (p) y la gran fuerza, "resistencia" (R), al eje de rotación sobre el cual gira la palanca se llama "punto de apoyo" o "fulcro" (A).
 y la gran fuerza, resistencia (R), al eje de rotación sobre el cual gira la palanca se llama punto de apoyo o fulcro (A).")
6
TIPOS DE PALANCAS: De acuerdo con la posición de la "potencia" y de la "resistencia" con respecto al "punto de apoyo", se consideran tres clases de palancas, que son: De primer tipo. Segundo tipo. Tercer tipo.

7
Primer tipo En el primer tipo el punto de apoyo se ubica entre la carga y la fuerza aplicada. Mientras mas cerca esta de la carga entonces la fuerza aplicada puede ser menor. Es nuestra idea intuitiva de palanca, algo que nos ayuda a mover una carga pesada.

8
Ejemplos

9
Segundo Tipo En el segundo tipo el punto de apoyo esta en un extremo del brazo, la carga se ubica en la parte mas cercana al punto de apoyo y la fuerza aplicada en la lejana. De esta forma funciona una carretilla. Su utilidad es evidente, mientras mas cerca este la carga en la carretilla del punto de apoyo, (la rueda), mas sencillo es desplazarla.
, mas sencillo es desplazarla.")
10
Ejemplo

11
Tercer tipo En el tercer tipo, el punto de apoyo sigue en uno de los extremos, pero invertimos las posiciones relativas de la carga y la fuerza aplicada. Como la carga esta mas alejada del punto de apoyo la fuerza aplicada debe ser mayor. En contraste la carga tiene un gran movimiento. De este tipo son las palancas que funcionan en las articulaciones de los brazos por ejemplo. Con independencia del tipo de palanca.

12
Ejemplo

13
¿Qué tipo de palanca será?

14
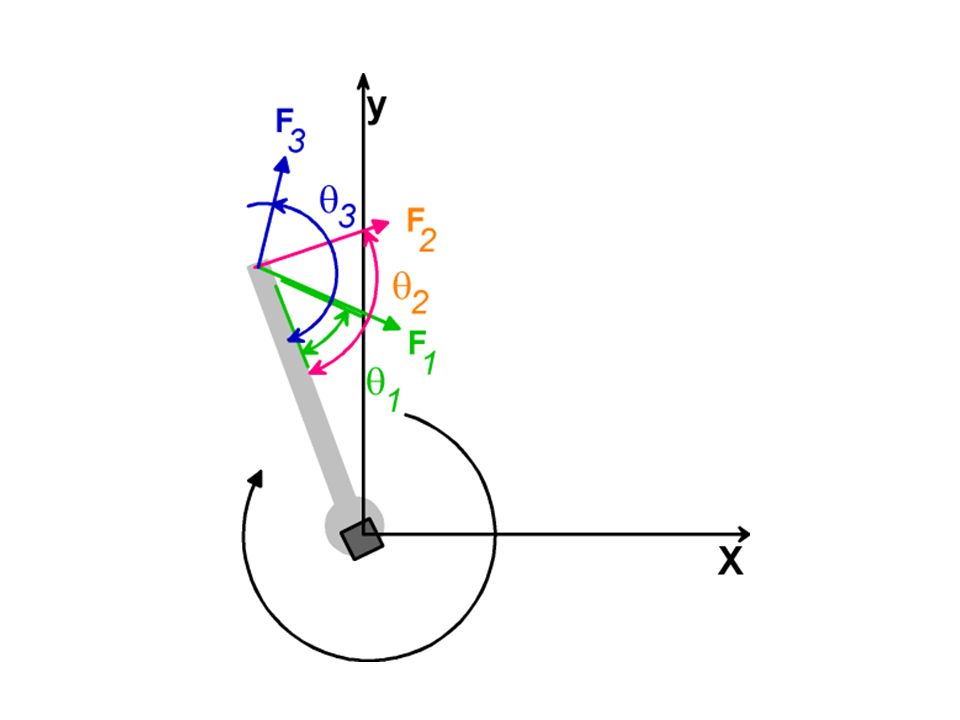
Momento de una fuerza Se denomina momento de una fuerza respecto de un punto, al producto vectorial del vector posición r de la fuerza por el vector fuerza F.( cuando hay un efecto de rotación)
")
15
En la primera figura, el tornillo avanza en una dirección perpendicular al plano de la página, y hacia el lector. En la segunda figura, el tornillo avanza en la misma dirección y sentido. Con una llave más larga estamos en una situación más favorable que con una llave más corta. En la tercera figura, el tornillo avanza en la misma dirección pero en sentido contrario.

16
El vector tiene Por módulo, = F · r · senθ = F · d . Siendo d el brazo de la fuerza (la distancia desde el punto O a la dirección de la fuerza) Dirección, perpendicular al plano determinado por la fuerza F y el punto O. Sentido, la aplicación de la regla del sacacorchos

20
Vectorialmente

21
Equilibrio de una barra
Supongamos una barra de masa despreciable, que está sujeta por su extremo O. Si colocamos un peso P a una distancia x del origen. El momento de esta fuerza respecto del origen O es + P·x1.

22
Atamos una cuerda a una distancia y del origen, y tiramos de ella haciendo un ángulo θ con la vertical, tal como se muestra en la figura. El momento de la fuerza F respecto del origen es -F·x2·cosθ.

23
Vectorial

24
Por lo tanto Para que la barra esté en equilibrio, el momento total deberá ser nulo. -F·X2·cosθ + P·x1=0 Más general Para que exista equilibrio, se debe cumplir que La suma de los momentos (torques) de ser cero Y la suma de las fuerzas de traslación debe ser cero
 de ser cero. Y la suma de las fuerzas de traslación debe ser cero.")
25
Matemáticamente

26
Ventaja mecánica Se define como ventaja mecánica a la razón entre la fuerza aplicada (potencia) y la Fuerza de carga o resistencia
 y la Fuerza de carga o resistencia.")
27
Un caso

28
Problema del 4-12 cap. 4 del Kane

29
¿qué se debe cumplir? Supongamos w2 = 0 w1=12[N]
![¿qué se debe cumplir Supongamos w2 = 0 w1=12[N]](http://slideplayer.es/slide/122316/1/images/29/%C2%BFqu%C3%A9+se+debe+cumplir+Supongamos+w2+%3D+0+w1%3D12%5BN%5D.jpg "¿qué se debe cumplir Supongamos w2 = 0 w1=12[N]")
30
Las fuerzas de traslación

31
resolviendo

32
Para las fuerzas T – F – w1 =0 36 – F – 12 = 0 F =24[N]
![Para las fuerzas T – F – w1 =0 36 – F – 12 = 0 F =24[N]](http://slideplayer.es/slide/122316/1/images/32/Para+las+fuerzas+T+%E2%80%93+F+%E2%80%93+w1+%3D0+36+%E2%80%93+F+%E2%80%93+12+%3D+0+F+%3D24%5BN%5D.jpg "Para las fuerzas T – F – w1 =0 36 – F – 12 = 0 F =24[N]")
33
Ahora con w2=12[N]
![Ahora con w2=12[N]](http://slideplayer.es/slide/122316/1/images/33/Ahora+con+w2%3D12%5BN%5D.jpg "Ahora con w2=12[N]")
35
Con las fuerzas T – F – w1 – w2 =0 120 – F – = 0 F =96[N]
![Con las fuerzas T – F – w1 – w2 =0 120 – F – = 0 F =96[N]](http://slideplayer.es/slide/122316/1/images/35/Con+las+fuerzas+T+%E2%80%93+F+%E2%80%93+w1+%E2%80%93+w2+%3D0+120+%E2%80%93+F+%E2%80%93+%3D+0+F+%3D96%5BN%5D.jpg "Con las fuerzas T – F – w1 – w2 =0 120 – F – = 0 F =96[N]")
36
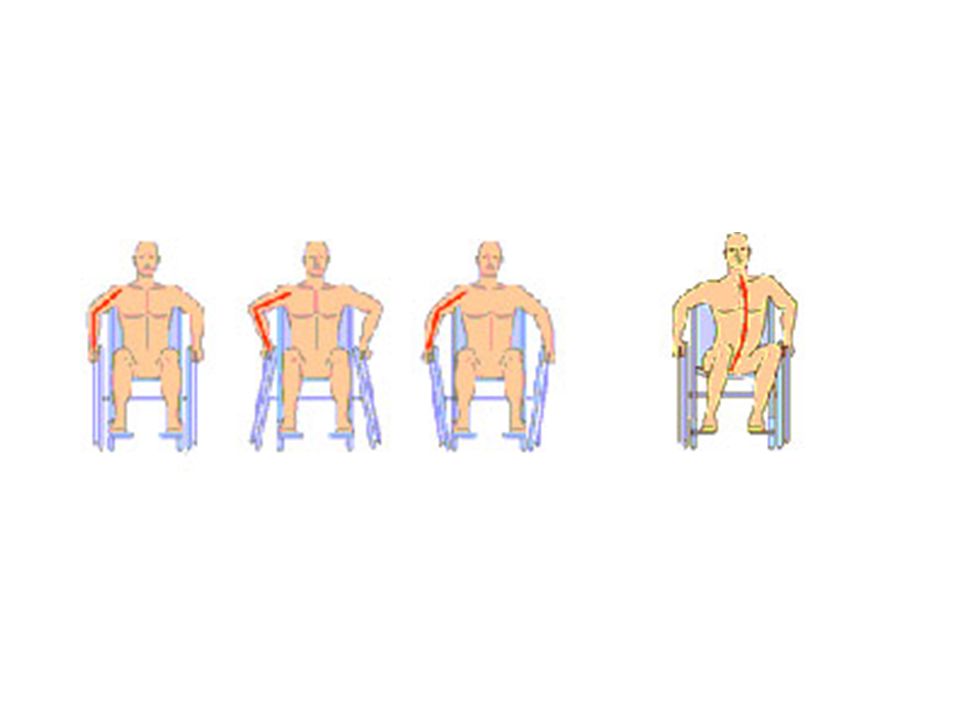
Torque un problema de la inestabilidad media lateral

37
Una solución empírica del paciente
si él puede balancear su cuerpo sobre la prótesis en cada paso, su pelvis se estabilizará debido a que esta acción mueve su centro de gravedad, punto “A”, directamente sobre el punto de pivote donde la tuberosidad isquiática descansa sobre el borde del socket en “B”

38
Una solución más técnica
debemos de encontrar alguna forma para hacer que el fémur amputado permanezca, tan cerca lo más posible, en la misma posición como si no estuviera amputado. En la prótesis de soporte isquiático (cuadrilateral), esto es obtenido en una gran extensión mediante la conformación y alineación del socket,
, esto es obtenido en una gran extensión mediante la conformación y alineación del socket,")
39
Otro caso a tener en cuenta

Presentaciones similares


















 a una magnitud vectorial, obtenida como producto.>")



