Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Integración de plataformas en un sistema robot móvil Autores: Masserini, Mauro – Zanotti, Ignacio Director: Ing./Lic. Escarza, Sebastián

2
Origen del proyecto y metodologías empleadas

3
Principios del proyecto: ◦ Aplicar los conocimientos adquiridos durante la carrera. ◦ Diseñar, desarrollar y testear componentes de hardware y software estrechamente relacionados. ◦ Enfrentar el desarrollo con protocolos y plataformas desconocidas ◦ Metas personales

4
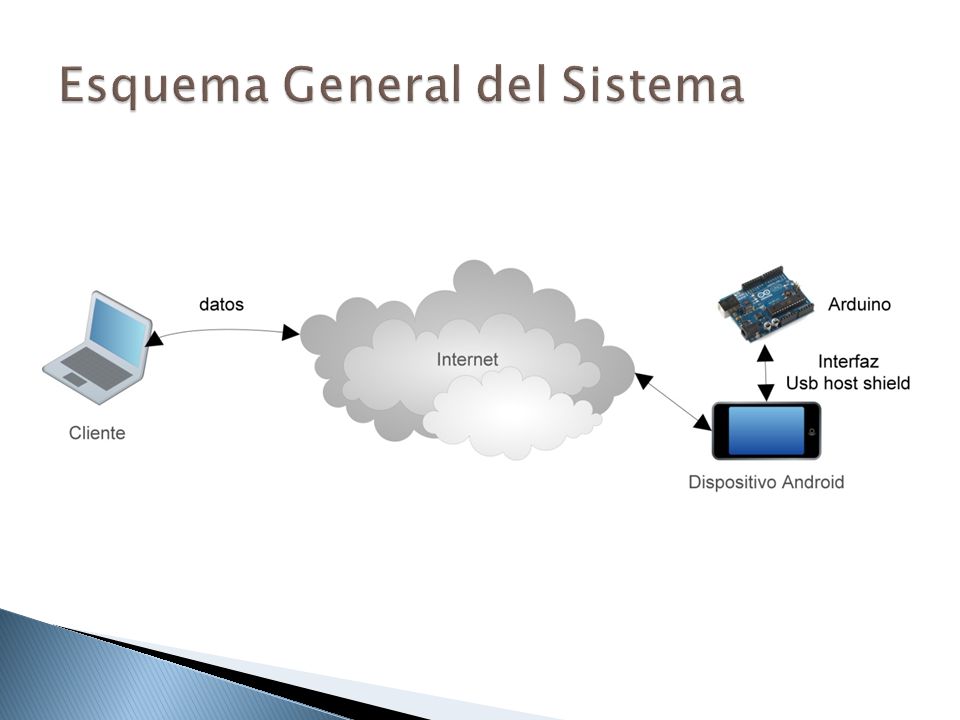
Objetivo del Proyecto: controlar, de manera inalámbrica y desde locaciones remotas, una placa microcontroladora arduino; haciendo uso de un dispositivo móvil corriendo un sistema operativo android para la interface de comunicación inalámbrica. Apuntando a -economizar el uso de la batería - experiencia de control fluida

5
Metodologías Empleadas. ◦ Relevamiento de requerimientos : Sistemas Asociados Características Deseables Experiencia Propia

6
Metodologías Empleadas. ◦ Alternativas de implementación Pull (HTTP) vs. Push (MQTT, GCM) ◦ Trabajo por bloques Concepción del Hardware, luego Software Testeo modular
 ◦ Trabajo por bloques Concepción del Hardware, luego Software Testeo modular.")
7
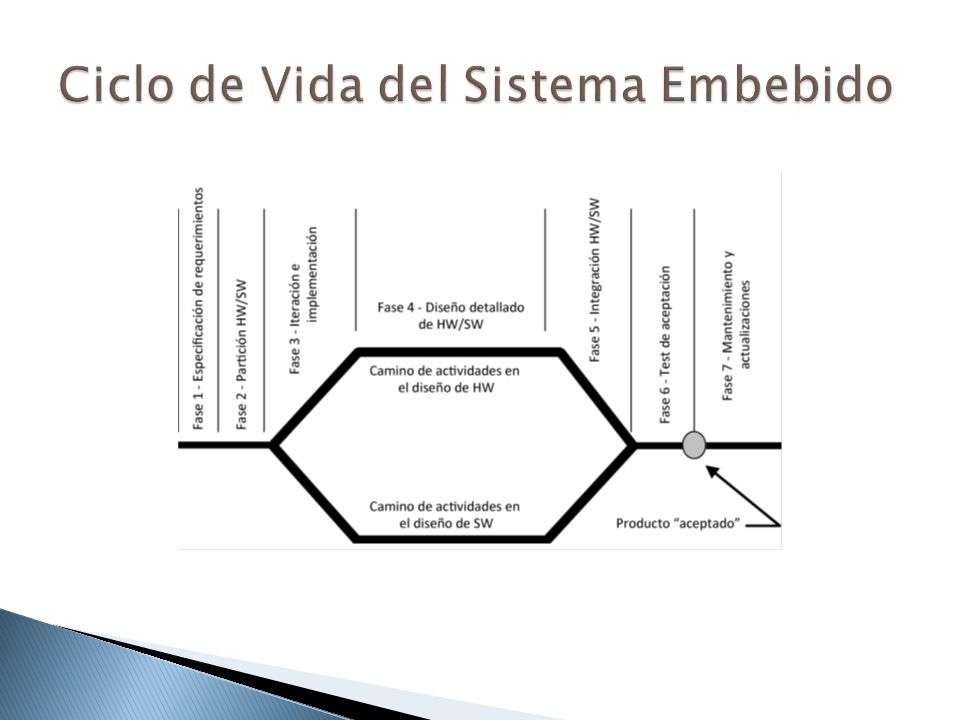
Descripción de las fases involucradas en el desarrollo del sistema

9
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Modelo a implementar: - Visualización a través de la interface remota del video del dispositivo móvil apuntando a un comportamiento de tiempo real. - Visualización (cámara y datos relevantes) y control del robot embebido en un sitio web público. - Control fluido y latencias mínimas. - Utilización de tecnologías de comunicación de baja latencia y bajo consumo.
 y control del robot embebido en un sitio web público. - Control fluido y latencias mínimas. - Utilización de tecnologías de comunicación de baja latencia y bajo consumo..")
10
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Modelo a implementar: Conexión transparente Primar el uso de tecnologías de código abierto (hardware y software) Generar software compatible con dispositivos móviles de gama media. Chasis del robot resistente y liviano, ruedas con cubiertas que ofrezcan tracción considerable teniendo en cuenta el torque ofrecido por los servomotores.
 Generar software compatible con dispositivos móviles de gama media. Chasis del robot resistente y liviano, ruedas con cubiertas que ofrezcan tracción considerable teniendo en cuenta el torque ofrecido por los servomotores..")
11
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Modelo a implementar: - Visualización a través de la interface remota del video del dispositivo móvil apuntando a un comportamiento de tiempo real. - Visualización (cámara y datos relevantes) y control del robot embebido en un sitio web público. - Control fluido y latencias mínimas. - Utilización de tecnologías de comunicación de baja latencia y bajo consumo.
 y control del robot embebido en un sitio web público. - Control fluido y latencias mínimas. - Utilización de tecnologías de comunicación de baja latencia y bajo consumo..")
12
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Modelo a implementar: Conexión transparente Generar software compatible con dispositivos móviles de gama media. Chasis del robot resistente y liviano, ruedas con cubiertas que ofrezcan tracción considerable teniendo en cuenta el torque ofrecido por los servomotores.

15
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Iteración e Implementación

16
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Desarrollo de Hardware

17
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Desarrollo de Software

18
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Diseño Detallado de Software Pull Push

19
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Integración HW y SW Bottom-up Top-down

20
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Testing

21
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Testing

22
1. Relevamiento de requerimientos. 2. Partición de HW y SW. 3. Iteración e implementación. 4. Diseño detallado de SW y HW. 5. Integración HW y SW. 6. Testing. Testing

23
Extensiones y Mejoras

24
Posibilidad de Volar Control ángulo cámara Compatibilidad con otras plataformas Estación de Carga Automática Streaming de Video Plug&PLay

26
Carácter Integrador por sobre la carrera Milestone de Desarrollo Proyectos de SW/HW abierto Google Android y Arduino

27
¡ Muchas Gracias !

Presentaciones similares