Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Sistemas complejos adaptativos Autómatas celulares
Carlos Reynoso UNIVERSIDAD DE BUENOS AIRES

2
Objetivos Clarificar la especie de los modelos descentralizados, microscópicos o down-to-top Profundizar en cuestiones de tratabilidad, emergencia y modelado Presentar instrumentos y describir estado de la cuestión Sugerir prácticas en torno del modelado urbano

3
Agenda Modelos microscópicos vs macroscópicos Autómatas celulares
Herramientas disponibles Aplicaciones a la problemática urbana Estudios de casos Conclusiones y propuestas Ejercicios de práctica Modelos de segregación, tráfico, drenaje, ambulación peatonal y evacuación

4
Modelos descentralizados
Imperativos en casos en que se desconocen las ecuaciones básicas, o se conocen pero son intratables Limitaciones de ODE y PDE Análogos a la forma distribuida de IA No hay control centralizado Alguna (leve) analogía con modelos rizomáticos de Deleuze-Guattari y con las tácticas de Michel de Certeau Formas específicas de orden: Auto-organización como emergente de la diferencia casi azarosa en el bajo nivel – Patrones de orden surgen del azar (BZ) Caos como emergente de principios deterministas (ecuación logística)
 analogía con modelos rizomáticos de Deleuze-Guattari y con las tácticas de Michel de Certeau. Formas específicas de orden: Auto-organización como emergente de la diferencia casi azarosa en el bajo nivel – Patrones de orden surgen del azar (BZ) Caos como emergente de principios deterministas (ecuación logística)")
5
Sistemas complejos adaptativos
Autómatas celulares Redes booleanas aleatorias Modelos basados en agentes autónomos Vida artificial Sociedades artificiales Cultura artificial Meta-heurísticas evolutivas

6
Engine oculto de SimCity, SimEarth, etc

7
Autómatas celulares ¿Es posible hacer una máquina que produzca otras máquinas tan complejas como ella misma? John von Neumann – Stanislav Ulam Basados en lógica viviente antes del descubrimiento del código genético Bateson puro: procesamiento de información, aprendizaje, evolución Modelo de tablero de damas (Checkerboard model) – Sakoda – Schelling Autómatas de teselación, estructuras celulares, arrays iterativos Inherentemente dinámicos y espaciales
 – Sakoda – Schelling. Autómatas de teselación, estructuras celulares, arrays iterativos. Inherentemente dinámicos y espaciales ")
8
Vecindades Moore Von Neumann Margolus (Hexagonal, gases)
")
9
John Conway Juego de la vida Reglas: Regla semi-totalística
Inactiva, 3 activas: Nace Activa, 2 o 3 activas: Estasis Otros casos: Muere Survival/birth 23/3 Regla semi-totalística Depende del estado de las 8 vecinas y del estado propio Estables, periódicos, móviles, reproductores Deslizadores o planeadores (Gliders) Arma o pistola deslizadora (Glider gun) Life32: Switchen – Patrón más pequeño que se propaga indefinidamente Gun30 – Bill Gosper’s
 Arma o pistola deslizadora (Glider gun) Life32: Switchen – Patrón más pequeño que se propaga indefinidamente. Gun30 – Bill Gosper’s.")
10
Objetos fijos, periódicos y móviles Pistola de Gosper

11
Autómatas celulares – Stephen Wolfram
Tipo I – Atractor de punto fijo Tipo II – Atractor periódico (108) Tipo III – Atractor caótico (18) Tipo IV – Atractor complejo Coincidencia con la jerarquía de Chomsky y con conductas de la ecuación logística
 Tipo III – Atractor caótico (18) Tipo IV – Atractor complejo. Coincidencia con la jerarquía de Chomsky y con conductas de la ecuación logística.")
12
Wolfram - Tipos

13
Codificación binaria [Cuadro de diálogo de Visions Of Chaos]
![Codificación binaria [Cuadro de diálogo de Visions Of Chaos]](http://slideplayer.es/slide/7303547/24/images/13/Codificaci%C3%B3n+binaria+%5BCuadro+de+di%C3%A1logo+de+Visions+Of+Chaos%5D.jpg "Codificación binaria [Cuadro de diálogo de Visions Of Chaos]")
14
Ejemplos Reglas 30 y 150 Necesidad de comprender exactamente el sentido de la numeración binaria y los bits [p. ej. Edgar Morin]

15
Visions of Chaos – AC de tráfico*
* Los vehículos corren de izquierda a derecha. La simulación se puede escuchar con la música correspondiente . Ver regla 30, 60 etc

16
Desafíos epistemológicos (1/2)
Auto-organización y complejidad emergente de reglas muy simples Vínculo entre micro y macro Vínculo entre agencia y estructura Complejidad sin aleatoriedad ni numerosidad No hay mayor complejidad si se agrega azar No hay formas más ricas de complejidad si se aumenta el número de elementos

17
Desafíos epistemológicos (2/2)
Si un modelo tan simple es inmanejable conceptualmente, habrá que guardarse de pensar la sociedad en términos lineales de sentido común Explosión combinatoria en modelos pequeños: ¿es tratable nuestro modelo de escala mayor? Conceptualización de agencia individual y totalidad

18
Herramientas

19
Herramientas AC de propósito general y modelos espaciales
Autómatas celulares *Mirek’s Cellebration *DUEM *Golly *Modelo de Von Thunen Life 32 Capow Cafun Java CASim

20
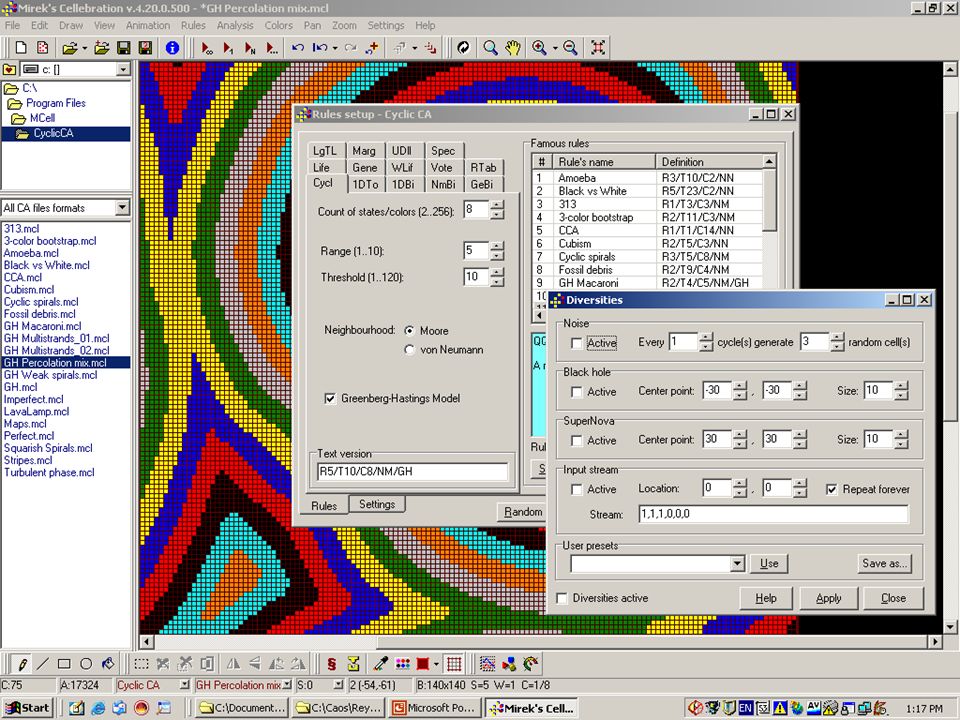
Mirek’s Cellebration Uno de los programas de mejor performance y mayor control, pero no programable en alto nivel Se pueden incorporar DLLs en C, C++ o equivalente Limitaciones inherentes al modelo básico Reglas deterministas Comportamiento monotónico Cambio de estado solamente No tiene concepto de patch Impropio para expresar condicionalidades complejas Calidad gráfica modesta (comparar con Visions of Chaos) No evoluciona desde hace algunos años Ventajas No hay que programar Muchísimas implementaciones por ser el programa de referencia
 No evoluciona desde hace algunos años. Ventajas. No hay que programar. Muchísimas implementaciones por ser el programa de referencia.")
21
Reglas Mcell (1/2) Wolfram Class IV Auto-replicador
1d Totalistic: Roots Auto-replicador Edward Fredkin: regla más simple (Vote / Fredkin) Orden a partir del caos Reacción de Beluzov-Zhabotinsky: Generations – BelZhav, RainZha Mescolanza (Hodgepodge) (Gerhard-Schuster): UserDLL-Hodge Simulated Annealing: Vote-Vote4-5 Majority Rules: LGTG, Majority (Sakoda) Conway’s Life: Life
 Orden a partir del caos. Reacción de Beluzov-Zhabotinsky: Generations – BelZhav, RainZha. Mescolanza (Hodgepodge) (Gerhard-Schuster): UserDLL-Hodge. Simulated Annealing: Vote-Vote4-5. Majority Rules: LGTG, Majority (Sakoda) Conway’s Life: Life.")
22
Reglas Mcell (2/2) Difusión limitada por agregación (Random walk):
UserDLL-DLA Langton, reproducción de DNA UserDLL-DNA Reglas Greenberg-Hastings CA excitables – Cyclic CA 313 – CCA - Cyclic spirals – GH Macaroni GH (nucleación de espirales simétricos)
")
24
Golly Herramienta más profesional, viva y reciente Código abierto:
Totalmente programable (scripting en Perl y Python) Varias capas de acción simultáneas Documentación exhaustiva
 Varias capas de acción simultáneas. Documentación exhaustiva.")
25
Golly

26
DUEM (1/2) Dynamic Urban Evolutionary Model
Elaborado por equipo de Batty en UCL Se puede bajar de la página o instalar del DVD de software Documentos referidos a su uso: Batty - Cities as complex systems Batty-Xie-Sun – Modelling urban dynamics through GIS-based evolutionary models

27
DUEM (2/2)
")
28
Modelo de Von Thunen No guarda relación con ACs pero los complementa
Esquemático pero adaptable Para comprender la problemática, más que para modelado real

29
SpaCelle

30
The Conway of Life 3D

31
a) Sugerencia de práctica
Consultar bibliografía relevante Batty – Torrens – O’Sullivan – Bäck – Di Gregorio Estudiar el ambiente de programación Elaborar un modelo de dinámica urbana simple en Golly, SpaCelle o Mirek’s – P. ej. DLA

32
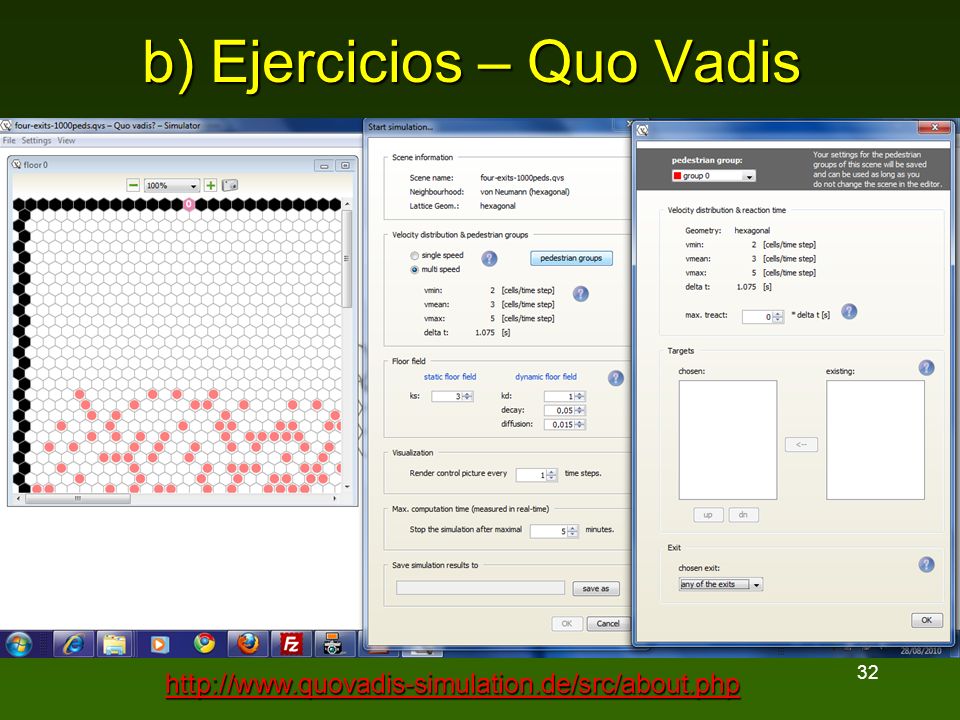
b) Ejercicios – Quo Vadis
33
Quo Vadis – Diseño de escenario

34
Campo estático del piso*
*Describe la distancia de una celda a una salida

35
Campo estático y vecindades

36
Campo dinámico del piso

37
Categorías adicionales (1/2)
Velocidad única o múltiples velocidades (de 1 a 5) Delta: diferencia entre el tiempo del modelo y el tiempo real Tiempo máximo de reacción: mide el tiempo que necesita un peatón para darse cuenta que existe un proceso de evacuación Objetivos [targets]: lugares por los que se querrá pasar antes de ir a una salida Se puede configurar si los miembros de un grupo escogerán una salida determinada o se dirigirán a la que esté más cerca Copper field – Hacia qué cuadrante elegirán moverse los miembros de un grupo [0, 1, 2, 3]
 Delta: diferencia entre el tiempo del modelo y el tiempo real. Tiempo máximo de reacción: mide el tiempo que necesita un peatón para darse cuenta que existe un proceso de evacuación. Objetivos [targets]: lugares por los que se querrá pasar antes de ir a una salida. Se puede configurar si los miembros de un grupo escogerán una salida determinada o se dirigirán a la que esté más cerca. Copper field – Hacia qué cuadrante elegirán moverse los miembros de un grupo [0, 1, 2, 3]")
38
Categorías adicionales (2/2)
La influencia del campo estático y dinámico se configura con ks y kd. También se puede definir la difusión y decadencia del piso dinámico. Se puede configurar cada cuantos cuadros se refresca el cuadro de control. En caso de corredores se puede evaluar la formación de carriles [lanes]. El proceso de evacuación se puede guardar como un video, pasar más lento, volver para atrás, etc. Como parte del video, se puede añadir un diálogo de datos estadísticos.

39
Análisis…

40
Modelos de escape

41
Ejercicio con Quo Vadis
Diseñar modelo de evacuación de la sala de conferencias de este curso, incluyendo los pisos inmediatos Computar y analizar la dinámica correspondiente

42
Ejercicios – Traffic Cellular Automata (Sven Maerivoet)
- Requiere JRE 1.3.1

43
Modelos de tráfico implementados SMTCA

44
Modelo de tráfico – Regla 184
AC unidimensional Interpretación: 125 pasos con densidades iniciales de 25%, 50% y 75% La densidad de vehículos corresponde al color

45
Otros modelos de tráfico
Ver Universidad de Delaware

46
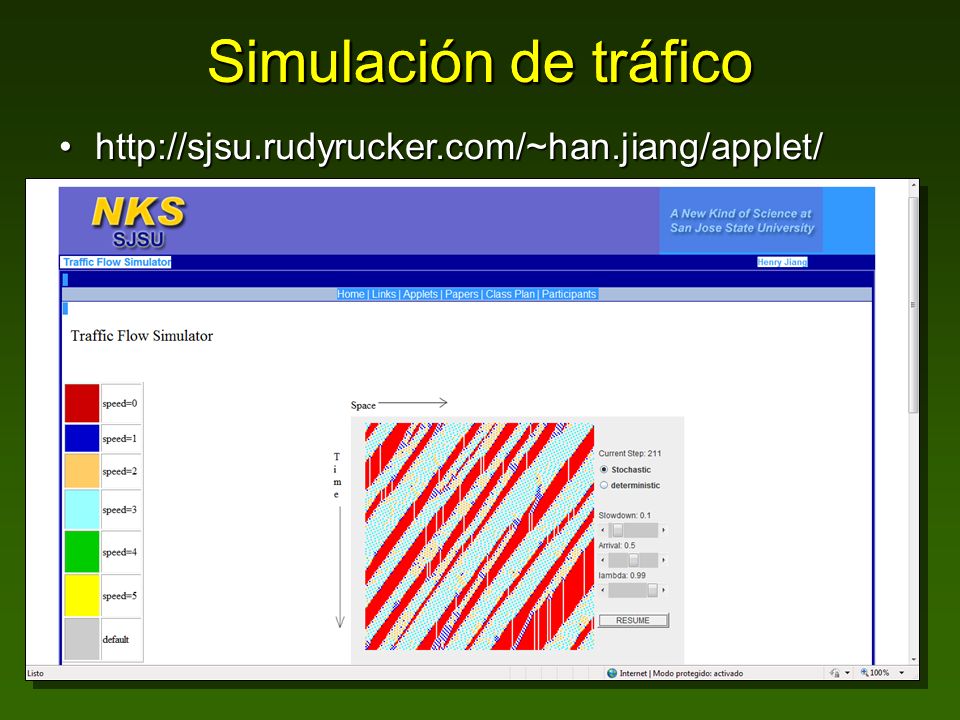
Simulación de tráfico

47
Simulación de tráfico

48
Simulación de tráfico Simulación de tráfico
49
Aplicaciones

50
Aplicaciones: Problemas urbanos de localización diferencial y relocalización
Sakoda – Valencias de segregación y sospecha

51
Aplicaciones de sociología urbana
Thomas Schelling - Segregación Ejemplo con Moduleco

52
Reelaboración del modelo de Schelling por Michael Batty (UCL)*
*Cities as complex systems

53
Aplicaciones en estudios sociales con dimensión espacial
Rainer Hegselmann Modelos complejos, grillas irregulares Examen de las implicancias epistemológicas para las ciencias sociales

54
Rainer Hegselmann - Correspondencias

55
Estudios de casos con SLEUTH
SLEUTH = Slope, Land use, Exclusion, Urban extent, Transportation, Hillshade Antes llamado Clark Cellular Automata Urban Growth Model Aplicación de referencia en proyección urbana Desarrollado por Keith Clarke en la UC en Santa Barbara Las iniciales del nombre describen los datos de entrada Las reglas se basan en 5 coeficientes

56
Slope – Término de GIS y análisis geo-espacial (véase DEM)
Se pueden generar de bases de datos topográficas

57
Excluded Montañas, aguas, etc

58
Transportation Incluye análisis de conectividad (sintaxis espacial)
")
59
Hillshade Usado como fondo para especificar la extensión espacial

60
Sitio de referencia

61
Proyecciones de uso de la tierra de la NASA http://earthobservatory

62
Proyección de crecimiento (SLEUTH)
Eficiencia aproximada superior al 80%

63
Predicciones Helsinki 2050*
’Controlled’ Growth accessibility roads as lines railroads + stations main roads + railroads ’Free’ Growth *Ver Urban Generator

64
Proyección de crecimiento e impacto ecológico http://www. insipub

65
Proyección de crecimiento (SLEUTH)
")
66
Metronamica (Alternativa a DUEM, pero > € 15.000)
")
67
Ejercicio con Metronamica
Archivo de escenario en Documentos>Geonamica>Metronamica…

68
Ejercicios y documentación incluidos en Demo

69
Evacuación – Situaciones de pánico
Surgimiento de atascos desproporcionados, senderos de contraflujo, cambios oscilatorios en los contraflujos en los cuellos de botella, brotes de conducta de rebaño, dependencia no monotónica del tiempo de evacuación respecto de parámetros inimaginables (el campo dinámico del piso, la paradoja de Braess), efectos de fricción, efectos de más-rápido-es-más-lento en situaciones de pánico, pánico fantasma, freezing-by-heating, formación de “dedos” viscosos, surgimiento de flujos más ordenados mediante la ampliación de las oscilaciones. MicroPedSim, SimWalk, SUMO
, efectos de fricción, efectos de más-rápido-es-más-lento en situaciones de pánico, pánico fantasma, freezing-by-heating, formación de dedos viscosos, surgimiento de flujos más ordenados mediante la ampliación de las oscilaciones. MicroPedSim, SimWalk, SUMO.")
70
Proyección de diseño 3D Diseñador arquitectónico 3D de Kicinger - NLA

71
Modelado arquitectónico 3D con Wolfram Mathematica® Player

72
Emulando uso de la tierra con Wolfram Mathematica® Player

73
Emulando regla de tráfico 184 con Wolfram Mathematica® Player

74
Componiendo música con CA en Wolfram Mathematica® Player

75
Elaboraciones mixtas y complejas
Geographic Automata Systems (GAS)+OBEUS (Object-Based Environment for Urban Simulation) Modelos espaciales más realistas y complejos (p. ej. Triángulos de Voronoi) Ejercicios con Wingeom Ver referencias en obras más recientes de Torrens y Benenson
+OBEUS (Object-Based Environment for Urban Simulation) Modelos espaciales más realistas y complejos (p. ej. Triángulos de Voronoi) Ejercicios con Wingeom. Ver referencias en obras más recientes de Torrens y Benenson.")
76
Ron Eglash (African fractals)
Owari, mancala Grupo en marcha - Vida Mancala

77
Wolfram – Patrones culturales
Columnas de Uruk, catedral de Anagni Regla 126 (Triángulo de Sierpiński)
")
78
Música – Automatous Monk
79
Problemas

80
Problemas de modelos complejos (1/2)
No es fácil imaginar las reglas Hoy en día se emplean metaheurísticas evolucionarias para inducir las reglas convenientes No hay certidumbre en relevancia de las variables consideradas Demasiadas variables, demasiados grados de libertad combinatoria de magnitud ultra-astronómica 5 x 5 x 2 grados de libertad = 33 millones de combinaciones Pequeñas diferencias en valores pueden conducir a comportamientos disímiles Ejemplo: clases de Wolfram

81
Problemas de modelos complejos (2/2)
Los escenarios de equilibrio no son sensibles a las condiciones iniciales Pero si el sistema es complejo, tiene extrema sensitividad a condiciones iniciales La trayectoria del comportamiento difiere aunque las condiciones iniciales sean casi idénticas No hay principios algorítmicos que permitan predecir el comportamiento de un sistema particular

82
Conclusiones

83
Conclusiones (1/3) Insuficiencia de modelos con “juego libre de variables” Necesidad de coordinar semántica del modelo con datos arqueológicos, sociales o urbanos específicos y de mezclar formalismos Necesidad de comprender mejor la dinámica de los sistemas complejos No deben usarse para “explicar” casos concretos, sino para describir clases genéricas de comportamiento (equilibrio, oscilación, caos, complejidad) El comportamiento es emergente de interacciones locales. No resulta de relaciones lineales entre “causas” y “efectos” (aunque el modelo es determinista)
 El comportamiento es emergente de interacciones locales. No resulta de relaciones lineales entre causas y efectos (aunque el modelo es determinista)")
84
Conclusiones (2/3) Importancia o inevitabilidad del modelado
Peligros latentes Modelos demasiado realistas y explosión combinatoria Principio KISS (Keep it simple, stupid) Interpretación tendiente al individualismo metodológico (incluso en textos como el de Resnik) No hay un modelo universal Requerimiento de programación para problemas puntuales Hay abundante material ahí afuera Sitio de Leigh Tesfatsion en Iowa
 Interpretación tendiente al individualismo metodológico (incluso en textos como el de Resnik) No hay un modelo universal. Requerimiento de programación para problemas puntuales. Hay abundante material ahí afuera. Sitio de Leigh Tesfatsion en Iowa.")
85
Conclusiones (3/3) Necesidad de tratar problemas a niveles más elementales que lo acostumbrado Aún así, no siempre los problemas son tratables Eficiencia en modelos predictivos de impacto ecológico y sustentabilidad Herramienta fundamental de toma de decisiones en cuestiones espaciales Sugerencia: Elegir un ambiente adecuado y profundizar en él SLEUTH, SpaCelle, Metronamica…

86
Recursos Wolfram – A new kind of science
Von Neumann – Artículos fundacionales de los autómatas celulares Hegselmann – Artículos sobre modelos celulares en ciencias sociales Cientos de documentos sobre ACs en archivos de Diseño Urbano Meister - Simulation of crowd dynamics… (Tesis)
 ")
87
Recursos Georg Meister, Simulation of crowd dynamics with special focus on building evacuations. Tesis de maestría. Hamburgo, Universidad de Ciencias Aplicadas. Aplicación de referencia: Quo Vadis

88
University College, London

89
Página de Schadschneider & Kirchner - Pedestrian
90
Recursos

91
Recursos

92
Recursos

93
Recursos

95
¿Preguntas?

Presentaciones similares