Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Modelación Matemática en la Distritación Miguel Ángel Gutiérrez Andrade Universidad Autónoma Metropolitana

2
Contenido Definición del problema Técnicas heurísticas empleadas Instancias Comparaciones Conclusiones

3
El problema de diseño de zonas Agrupar un conjunto de unidades geográficas en zonas, tales que minimizan una función objetivo y satisfacen ciertas restricciones

4
El problema de diseño de zonas Agrupar un conjunto de unidades geográficas en zonas, tales que minimizan una función objetivo y satisfacen ciertas restricciones

5
El problema de diseño de zonas Agrupar un conjunto de unidades geográficas en zonas, tales que minimizan una función objetivo y satisfacen ciertas restricciones

6
El problema de diseño de zonas Agrupar un conjunto de unidades geográficas en zonas, tales que minimizan una función objetivo y satisfacen ciertas restricciones

7
Características del problema Problema de optimización combinatoria NP-Duro Crear un plan de zonificación conexo y con equilibrio poblacional es un problema NP-duro Crear un plan de zonificación que maximice la compacidad es un problema NP- duro

8
Complejidad computacional Unidades geográficas105080150250 Número de planes5115.6 x 10 14 6.04 x 10 23 7.13 x 10 44 9 x 10 74 Años requeridos6.4 x 10 -21 7.1 x 10 -9 7.69.0 x 10 21 1.1 x 10 52 Se considera una computadora capaz de realizar 2.5 x 10 15 planes por segundo. Se muestra el número posible de planes de zonificación para dividir un estado hipotético en dos zonas. El número total de soluciones para dividir n UG en k zonas está dado por el número de Stirling del segundo tipo:

9
Zonas electorales Diseño de zonas electorales

10
Zonas electorales Diseño de zonas electorales Equilibrio poblacional Conexidad Compacidad geométrica

11
Características del problema Conexidad Equilibrio poblacional Compacidad geométrica

12
Características del problema Conexidad Equilibrio poblacional Compacidad geométrica Capacidad de conectar unidades geográficas de una zona mediante unidades que también formen parte de dicha zona. Es una restricción del problema.

13
Características del problema Conexidad Equilibrio poblacional Compacidad geométrica Busca que todas las zonas contengan la misma cantidad de habitantes y penaliza las diferencias. Se incluye en la función objetivo

14
Características del problema Conexidad Equilibrio poblacional Compacidad geométrica Busca que las zonas sean homogéneas y sin irregularidades o figuras confusas. Se incluye en la función objetivo

15
Conforme al Acuerdo del Consejo General CG-104-2004 Equilibrio poblacional

17
Compacidad geométrica Donde P s es el perímetro de la zona s A s es el área de la zona s

18
Función objetivo Minimizar C(P) = α 1 C 1 (P) + α 2 C 2 (P) Donde Z s = { i : x is = 1}, es el conjunto de UG en la zona s S P = {Z 1, Z 2, Z 3,…, Z n }, es un plan de zonificación C 1 (P), es el costo de equilibrio poblacional del plan P C 2 (P), es el costo de compacidad del plan P α 1, α 2, factores de ponderación
 = α 1 C 1 (P) + α 2 C 2 (P) Donde Z s = { i : x is = 1}, es el conjunto de UG en la zona s S P = {Z 1, Z 2, Z 3,…, Z n }, es un plan de zonificación C 1 (P), es el costo de equilibrio poblacional del plan P C 2 (P), es el costo de compacidad del plan P α 1, α 2, factores de ponderación")
19
Técnicas heurísticas Para el proceso electoral del 2006 el IFE utilizó un algoritmo basado en recocido simulado. Se diseñaron: Recocido simulado Optimización por Enjambre de Partículas (PSO). Colonia de abejas artificiales (ABC). Se aplicaron a los estados de Baja California, Chiapas, Distrito Federal, Guanajuato y México.
. Colonia de abejas artificiales (ABC). Se aplicaron a los estados de Baja California, Chiapas, Distrito Federal, Guanajuato y México..")
20
Recocido simualdo Heurística propuesta por Kirkpatrick en 1983. Se basa en una analogía entre el proceso de optimización y el recocido de sólidos. Inicia con una solución y en cada iteración genera soluciones vecinas. La solución actual es reemplazada por la nueva si esta última mejora el costo de la función objetivo. En caso contrario, utilizar el criterio de Metrópolis para aceptar o rechazar. Este proceso se repite hasta que la temperatura de enfriamiento es alcanzada.

21
Optimización por enjambre de partículas Heurística de inteligencia colectiva (Kennedy, Eberhart, 1995) Una población de partículas se mueve en el espacio de soluciones Cada partícula toma en cuenta dos factores: El conocimiento y habilidades propias adquiridas durante su vida. La influencia del líder.

22
Optimización por enjambre de partículas Movimiento actual Mejor personal Mejor global Nueva dirección

23
Colonia de abejas artificiales Heurística inspirada en el proceso de recolección de las abejas (Karaboga, 2005). Cada fuente de alimento representa una solución. Existe tres tipos de abejas: Recolectora: Tiene asignada una fuente de alimento, explora regiones vecinas, reporta la calidad de la fuente actual. Observadoras: Elige una fuente de alimento con base en su calidad, explora regiones vecinas, evalúa la calidad de las fuentes. Exploradoras: Buscan nuevas fuentes de alimento cuando se deben abandonar las fuentes agotadas.

24
Implementación EstadosPoblaciónUG´sZonas Baja California2, 487, 3673198 Chiapas3, 920, 89222912 Distrito Federal8, 605, 23986027 Guanajuato4, 663, 03245414 Estado de México13, 096, 68683640

25
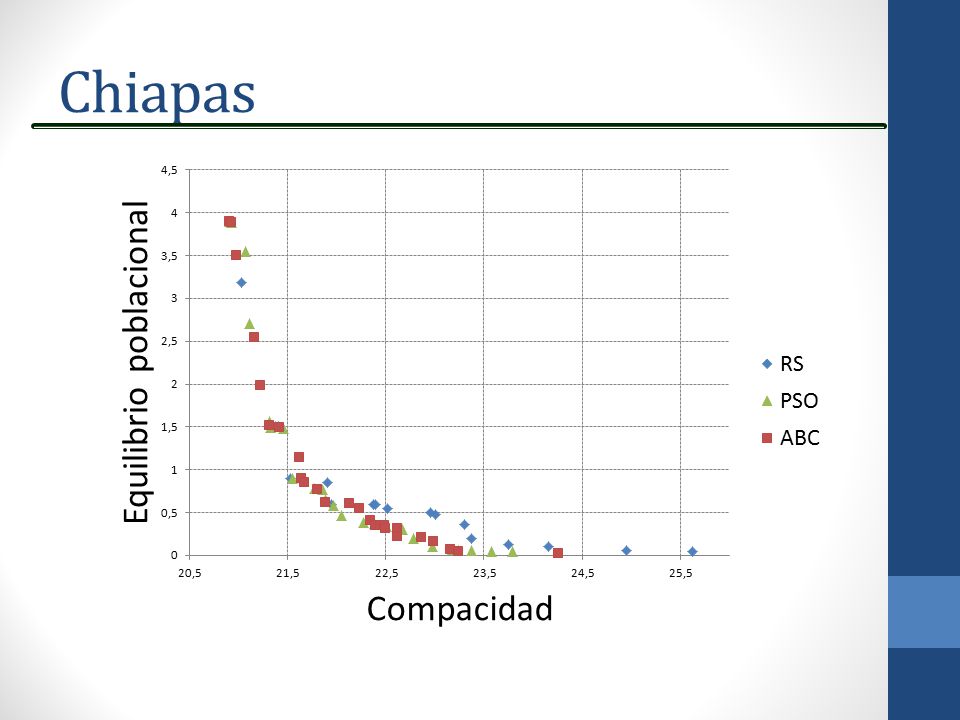
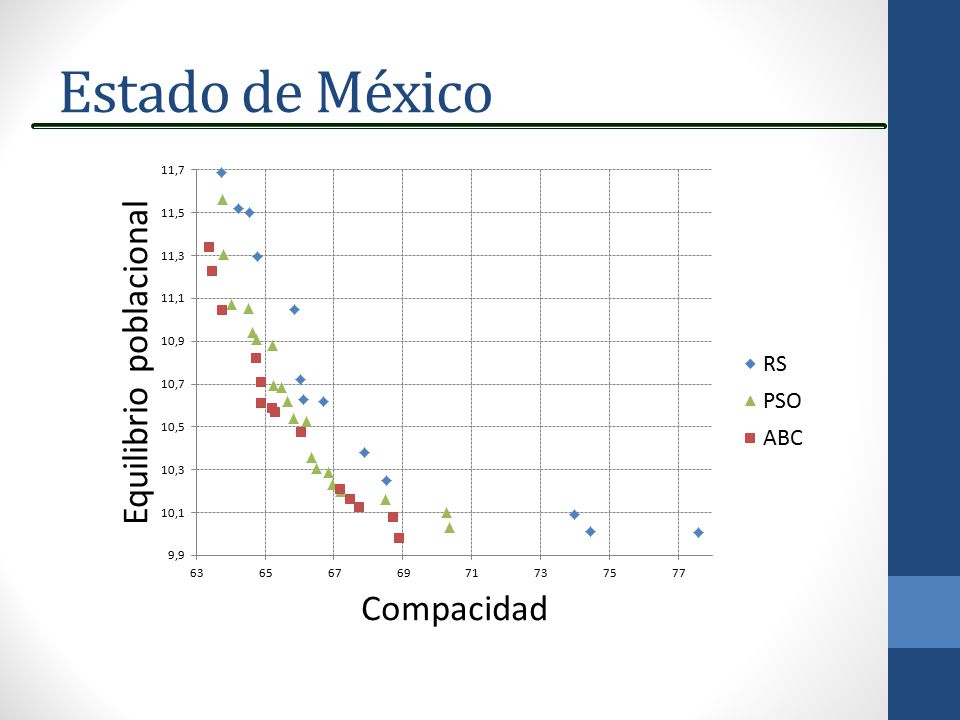
Implementación Se consideraron los factores de ponderación α 1 = {0.9, 0.8,…, 0.1, 0.01}, α 2 = 1 - α 1 Para disminuir el efecto estocástico se realizaron 10 corridas para cada factor. Cada ejecución produce una solución. Las 100 soluciones de cada algoritmo fueron filtradas para obtener las soluciones no dominadas. Para promover igualdad en la comparación cada algoritmo puede realizar 200,000 llamadas a la función objetivo.

26
Chiapas

28
Estado de México

30
Distrito Federal

31
Baja California

32
Guanajuato

33
Conclusiones Se presentaron 3 algoritmos basados en técnicas heurísticas. Se aplicaron en 5 estados de la República Mexicana. Los resultados de cada algoritmo fueron evaluados en términos de su convergencia y dispersión. Colonia de Abejas Artificiales presenta resultados de mejor calidad. Se propone implementar versiones multi-objetivo y determinar si la calidad de las soluciones puede ser mejorada.

34
Gracias por su atención

Presentaciones similares