Descargar la presentación
La descarga está en progreso. Por favor, espere

1
APLICACIONES DE PROCESOS INDUSTRIALES
INFORMATICA APLICADA Olga Romero Barba

2
LENGUAJES DE PROGRAMACION

3
VISUAL BASIC (VB) Visual Basic Express es una manera rápida y sencilla de crear programas para Microsoft Windows. Aunque no se tenga experiencia de programación en Windows. Proporciona a los programadores la capacidad de crear, manipular y eliminar los registros de base de datos y objetos. Varios objetos de base de datos están incluidos en el compilador suministrado por Microsoft. Usando unas pocas líneas de código, un desarrollador puede crear una base de datos sobre la marcha y utilizarlo para cargar los registros.

4
Pasos para conectar una Base de Datos con VB:
Para iniciar la conexión de la base de datos a visual basic se debe de tener un controlador, el cual se encuentra en la pestaña proyectos-componentes. Aparece una ventana la cual se ingresa el control que permite ingresar la base de datos a VB. Este control se llama Microsoft ADO data control 6.0 (OLEDB), se selecciona y aceptar. Una vez aparece el controlador en el formulario, se selecciona y se empieza a configurar la propiedad Conecctionstring. Clic en dicha propiedad y aparece una ventana, la cual indica que se empezara a usar una cadena de conexión y se da clic en el botón generar.
, se selecciona y aceptar. Una vez aparece el controlador en el formulario, se selecciona y se empieza a configurar la propiedad Conecctionstring. Clic en dicha propiedad y aparece una ventana, la cual indica que se empezara a usar una cadena de conexión y se da clic en el botón generar.")
5
Aparece una ventana con el nombre de vinculo de datos y en la pestaña proveedor se selecciona la opción Microsoft OLE DB Provider for ODBC Drivers y luego clic en Siguiente. En la pestaña conexión se selecciona usar cadena de conexión y clic en generar. Aparece otra ventana con el nombre de seleccionar origen de datos y en la pestaña origen de datos de archivo, se da clic en el botón Nuevo. En la ventana con el nombre de crear nuevo origen de datos, se selecciona un ordenador para el que se desee establecer un origen de datos, con el nombre de Microsoft Access Driver (*.mdb, *accdb) y luego clic en Siguiente. En la siguiente tabla se da clic en el botón Examinar y se busca la base de datos, se la selecciona y clic en Guardar.
 y luego clic en Siguiente. En la siguiente tabla se da clic en el botón Examinar y se busca la base de datos, se la selecciona y clic en Guardar.")
6
En la última ventana se da clic en Finalizar y se creara el origen de datos que se acaba de configurar. Luego aparece otra ventana con el nombre de configurar ODBC Microsoft Access y se da clic en el botón Seleccionar. Se selecciona la base de datos y clic dos veces en el botón Aceptar. Se selecciona el nombre del DSN y clic en Aceptar. Seleccionar el control adodc y en la propiedad recordsource en tipos de comando seleccionar 2-adCmdTable, también se selecciona la tabla y clic en Aceptar.

7
Seleccionar todos los textbox y en la propiedad Data Source se selecciona adodc1.
Luego en cada textbox en la propiedad Datafield se selecciona el campo que aparecerá en esa caja. Se agrega s command button que permiten ingresar y eliminar información de la base de datos. Finalmente doble clic en los botones Adicionar y Eliminar e introducir los códigos que aparecen n el pantallazo, el primero es para adicionar y el segundo para eliminar. Y ya se tiene la base de datos conectada al programa de Visual Basic funcionando.

8
COMUNICACIONES Y REDES

9
PUERTOS Los puertos de comunicación son una serie de puertos que sirven para comunicar nuestro ordenador con los periféricos u otros ordenadores. Se trata en definitiva de dispositivos I/O (Imput/Output, o Entrada/Salida). Clasificación de puertos de red: Físicos Lógicos.
. Clasificación de puertos de red: Físicos. Lógicos.")
10
Puertos físicos o Interfaces físicas: Son todos conectores integrados en tarjetas de expansión ó en la Motherboard de la computadora; utilizados para interconectar una gran gama de dispositivos externos (eSATA, USB, FireWire, PS/2, HDMI, VGA, RJ45, Jack 3.5, etc.) e internos (PATA/IDE, SATA, PCI, PCIe, RAM, AGP, Socket o Slot para CPU, etc.) con la computadora. Permiten la interconexión de computadoras por medio de cables. Puerto RJ45: para red local (LAN) vía cable par trenzado con velocidad de <= 1Gbps Puerto RJ11: para red telefónica via cable telefónico con velocidad <= 2Mbps Puerto de red BNC: LAN via cable coaxial con velocidad de <= 10Mbps. Puerto de red DB15: (en desuso) via cable de 15 pines, con velocidad <=10 Mbps.
 vía cable par trenzado con velocidad de <= 1Gbps. Puerto RJ11: para red telefónica via cable telefónico con velocidad <= 2Mbps. Puerto de red BNC: LAN via cable coaxial con velocidad de <= 10Mbps. Puerto de red DB15: (en desuso) via cable de 15 pines, con velocidad <=10 Mbps.")
11
Puertos Lógicos de Red: Suelen estar numerados para de esta forma poder identificar la aplicación que lo usa. La implementación del protocolo en el destino utilizará ese número para decidir a qué programa entregará los datos recibidos. Esta asignación de puertos permite a una máquina establecer simultáneamente diversas conexiones con máquinas distintas, ya que todos los paquetes que se reciben tienen la misma dirección, pero van dirigidos a puertos diferentes. Para la asignación de protocolo a los puertos lógicos, existen tres categorías: Puertos bien conocidos: Puertos del 0 al 1023 son puertos reservados para el sistema operativo y usados por "Protocolos Bien Conocidos" como por ejemplo HTTP (servidor Web), POP3/SMTP (servidor de ), Telnet y FTP.
, POP3/SMTP (servidor de ), Telnet y FTP.")
12
Puertos registrados: Comprendidos entre 1024 y son denominados "registrados" y pueden ser usados por cualquier aplicación. Puertos dinámicos o privados: Comprendidos entre los números y son denominados “dinámicos o privados”, normalmente se asignan en forma dinámica a las aplicaciones de clientes al iniciarse la conexión. Su uso es poco común, son usados en conexiones peer to peer (P2P).
.")
13
Principales puertos de comunicación:
PUERTO SERIE (RS-232): también conocidos como puertos serie y como puertos COM son uno de los primeros puertos de comunicaciones incorporados a los PC, pero también uno de los más ineficaces. El interface de este tipo de puerto suele ser de dos tipos, de 9 pines (normalmente señalado como COM1) y de 25 pines (normalmente señalado como COM2), siendo estos conectores de tipo MACHO en la parte del PC. A pesar de estar cayendo en desuso, este puerto sigue siendo muy utilizado en las comunicaciones de las cajas registradoras, visores, impresoras de tickets y unidades lectoras/grabadoras de EPROM y en general para las conexiones de configuración de numerosos dispositivos.
: también conocidos como puertos serie y como puertos COM son uno de los primeros puertos de comunicaciones incorporados a los PC, pero también uno de los más ineficaces. El interface de este tipo de puerto suele ser de dos tipos, de 9 pines (normalmente señalado como COM1) y de 25 pines (normalmente señalado como COM2), siendo estos conectores de tipo MACHO en la parte del PC. A pesar de estar cayendo en desuso, este puerto sigue siendo muy utilizado en las comunicaciones de las cajas registradoras, visores, impresoras de tickets y unidades lectoras/grabadoras de EPROM y en general para las conexiones de configuración de numerosos dispositivos.")
14
PUERTO PARALELO: más conocido como puerto de impresora, Puerto LPT o Centronic, que es el nombre que recibe el conector del extremo correspondiente a la impresora, siendo el conector de la parte del ordenador un conector de 25 pines del tipo HEMBRA. El puerto paralelo envía un byte o más de datos a la vez por diferentes hilos, más una serie de bits de control, creando un bus de datos. En este aspecto de comporta de forma diferente al puerto serie, que hace el envío bit a bit, y por el mismo hilo. PUERTOS USB: tiene entre sus ventajas, además de una mayor velocidad de transmisión, el que a través del mismo puerto se pueden alimentar periféricos de bajo consumo (incluso un escáner, un disco duro externo, etc.).
.")
15
En cuanto a las capacidades y tipos, existen varios tipos diferentes de puertos USB:
USB 1.1: Prácticamente en desuso, que presentaba dos velocidades de transmisión diferentes, 1.5Mb/s para teclados, ratones y otros dispositivos que no necesitan mayores velocidades, y una velocidad máxima de 12Mb/s. USB 2.0: Apareció ante la necesidad de una mayor velocidad de transmisión, llegando esta hasta los 480Mb/s teóricos (en la práctica es muy difícil alcanzar esa velocidad). PUERTOS IEEE 1394 O FIREWIRE: Este tipo de puerto fue inventado por Apple a mediados de los años 90 para solucionar el problema de conectividad y velocidad que existía incluso con el USB 1.1.
. PUERTOS IEEE 1394 O FIREWIRE: Este tipo de puerto fue inventado por Apple a mediados de los años 90 para solucionar el problema de conectividad y velocidad que existía incluso con el USB 1.1.")
16
Tiene la posibilidad de conectar en el mismo bus hasta 63 dispositivos y es totalmente compatible tanto con Mac como con PC, permitiendo incluso la interconexión de ambos. PUERTO IrDA (INFRARROJOS): Se utilizan para comunicación inalámbrica entre los dispositivos y el ordenador. Su creación de debe entre otros a HP, IBM y Sharp. Soporta velocidades de entre 9600bps y 4Mbps en modo bidireccional, por lo que su uso es bastante amplio, si bien el más extendido quizás sea la conexión entre teléfonos móviles, tanto entre sí como con ordenadores. Su uso fue reemplazado por los dispositivos BlueThooth, ya que los dispositivos IrDA presentan una serie de inconvenientes que se han superado con la tecnología BlueThooth.
: Se utilizan para comunicación inalámbrica entre los dispositivos y el ordenador. Su creación de debe entre otros a HP, IBM y Sharp. Soporta velocidades de entre 9600bps y 4Mbps en modo bidireccional, por lo que su uso es bastante amplio, si bien el más extendido quizás sea la conexión entre teléfonos móviles, tanto entre sí como con ordenadores. Su uso fue reemplazado por los dispositivos BlueThooth, ya que los dispositivos IrDA presentan una serie de inconvenientes que se han superado con la tecnología BlueThooth.")
17
CONEXIONES ETHERNET (RJ-45): Este tipo de conexión está presente hoy en día en la práctica de las placas base a la venta, y por consiguiente en los ordenadores que se venden, siendo muy utilizado para las conexiones red, incluidas las conexiones a Internet por router. Este tipo de conexiones recibe el nombre de la tecnología empleada en este tipo de conexiones, cuyo uso principal son las conexiones de red. De entre estos dispositivos, quizás el que puede resultar más familiar son las impresoras con conexión de red. CONECTORES PS/2: Los ordenadores suelen tener dos conectores PS/2 dedicados, uno para el teclado (comúnmente de color violeta claro) y otro para el ratón (que suele ser verde claro). Estos conectores fueron introducidas en 1987 por IBM y se han convertido en los conectores estándar para este tipo de dispositivos, en sustitución de los conectores DIN para teclado y de los puerto serie para ratón.
 y otro para el ratón (que suele ser verde claro). Estos conectores fueron introducidas en 1987 por IBM y se han convertido en los conectores estándar para este tipo de dispositivos, en sustitución de los conectores DIN para teclado y de los puerto serie para ratón.")
18
CLIENTE - SERVIDOR Según la definición de IBM, la red Cliente/Servidor es la tecnología que proporciona al usuario final el acceso transparente a las aplicaciones, datos, servicios de cómputo o cualquier otro recurso del grupo de trabajo y/o, a través de la organización, en múltiples plataformas. El modelo soporta un medio ambiente distribuido en el cual los requerimientos de servicio hechos por estaciones de trabajo inteligentes o clientes, resultan en un trabajo realizado por otros computadores llamados servidores. En este modelo todos los clientes están conectados a un servidor, que puede ser cualquier computadora en el que se centralizan los diversos recursos y aplicaciones con que se cuenta; y que los pone a disposición de los clientes cada vez que estos son solicitados. Todas las gestiones que se realizan se concentran en el servidor, de manera que en él se disponen los archivos que son de uso público, de uso restringido, de sólo lectura y los que pueden ser modificados, etc.

19
Funciones de Cliente/Servidor:
Manejo de la interfaz de usuario. Captura y validación de los datos de entrada. Generación de consultas e informes sobre las bases de datos. Por su parte los servidores realizan, entre otras, las siguientes funciones: Gestión de periféricos compartidos. Control de accesos concurrentes a bases de datos compartidas. Enlaces de comunicaciones con otras redes de área local o extensa.

20
Tipos de sistemas de los Cliente-Servidor:
Dependiendo de las aplicaciones que el servidor pone a disposición de los clientes: Servidores de Impresión: mediante el cual los usuarios comparten impresoras. Servidores de Archivos: con el cual los clientes comparten discos duros. Servidores de Bases de Datos: donde existe una única base de datos. Servidores de Lotus Notes: permiten el trabajo simultáneo de distintos clientes con los mismos datos, documentos o modelos. Servidores Web: también utilizan la tecnología Cliente- Servidor, aunque añaden aspectos nuevos y propios a la misma.

21
Ventajas: Desventajas:
Centralización del control de los recursos, datos y accesos. Facilidad de mantenimiento y actualización del lado del servidor: Esto es porque el lado del servidor se puede mantener o actualizar fácilmente. Hay muchas herramientas cliente-servidor probadas, seguras y amigables para usar. Desventajas: Si el número de clientes simultáneos es elevado, el servidor puede saturarse. Esto sucede con menor frecuencia en las redes P2P. Frente a fallas del lado del servidor, el servicio queda paralizado para los clientes. Algo que no sucede en una red P2P.

22
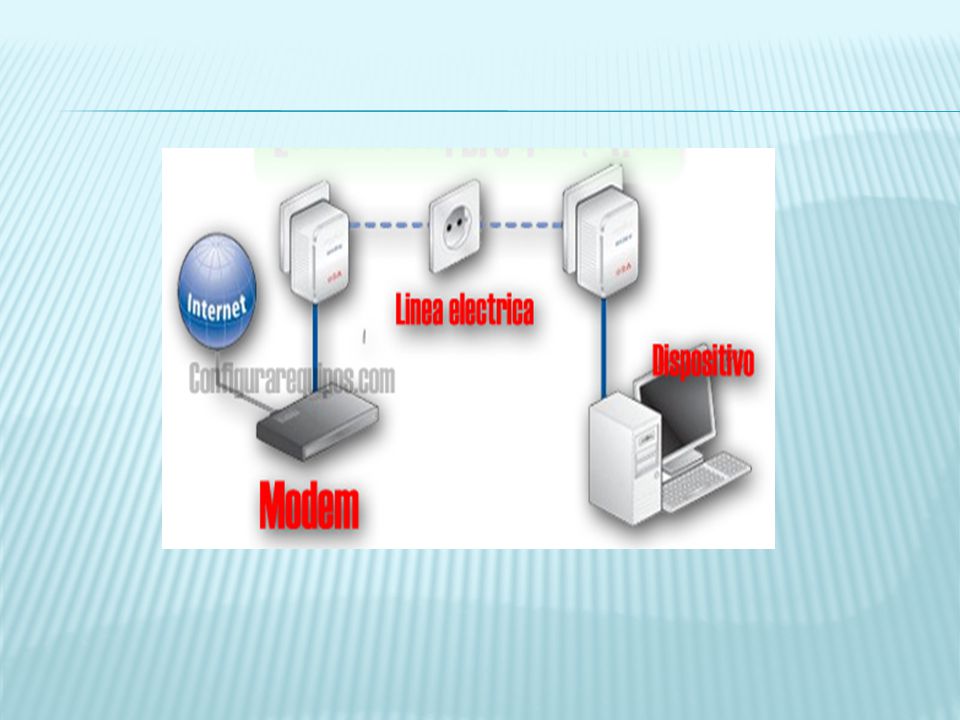
LADO PLC La tecnología PLC (Power Line Communications) es un soporte para la transmisión de datos por cable, pero que ofrece ciertas ventajas sobre las redes de cable de datos (cable cruzado) y también sobre las redes Wifi. Su objetivo es proporcionar conectividad con redes locales a través de la instalación eléctrica ya existente en hogares y empresas. Es decir, PLC utiliza el cableado de nuestras casas para transmitir datos además de la corriente eléctrica. Esta tecnología lo que hace, es utilizar el cableado eléctrico de nuestra casa para transferir datos de un dispositivo a otro, o para acceder directamente a Internet.
 es un soporte para la transmisión de datos por cable, pero que ofrece ciertas ventajas sobre las redes de cable de datos (cable cruzado) y también sobre las redes Wifi. Su objetivo es proporcionar conectividad con redes locales a través de la instalación eléctrica ya existente en hogares y empresas. Es decir, PLC utiliza el cableado de nuestras casas para transmitir datos además de la corriente eléctrica. Esta tecnología lo que hace, es utilizar el cableado eléctrico de nuestra casa para transferir datos de un dispositivo a otro, o para acceder directamente a Internet.")
23
Elementos de una red PLC:
Redes Eléctricas: Se debe conocer que las redes eléctricas convierten los voltajes de media tensión a líneas de baja tensión 220V, lo más cerca posible de los usuarios. De las tres partes en que se compone la red eléctrica (tramos de baja tensión, de media y de alta tensión), se utiliza únicamente el tramo de baja tensión. Transformadores: Cada transformador distribuye, típicamente entre 3 y 6 líneas de baja tensión, con una longitud media de unos 250 metros. Cada una de ellas proporciona suministro eléctrico a unos 50 clientes.
, se utiliza únicamente el tramo de baja tensión. Transformadores: Cada transformador distribuye, típicamente entre 3 y 6 líneas de baja tensión, con una longitud media de unos 250 metros. Cada una de ellas proporciona suministro eléctrico a unos 50 clientes.")
24
Al transformador llega un acceso de banda ancha como la fibra óptica suministrado por un ISP (Internet Service Provider), en las subestaciones eléctricas se instalan servidores que se conectan a Internet, donde un Router PLC se encarga de distribuir el recurso a los diferentes usuarios que comparten la misma línea de transmisión de baja tensión a través de un Módem PLC. Módem de Cabecera: La compañía eléctrica deberá colocar el módem de recepción de datos. La cabecera PLC convierte los datos de la red PLC de baja tensión al estándar de Internet (Ethernet/USB) que se encarga de interconectar las diferentes redes de servicio (Internet, Televisión, Telefonía) con la línea de baja tensión, garantizando una conexión a alta velocidad y potente para dar servicio a todos los usuarios. Cableado Eléctrico: Básicamente se utiliza el cableado de baja tensión como una red de telecomunicaciones, donde los enchufes de cada hogar u oficina se convierten en puntos de conexión.
 que se encarga de interconectar las diferentes redes de servicio (Internet, Televisión, Telefonía) con la línea de baja tensión, garantizando una conexión a alta velocidad y potente para dar servicio a todos los usuarios. Cableado Eléctrico: Básicamente se utiliza el cableado de baja tensión como una red de telecomunicaciones, donde los enchufes de cada hogar u oficina se convierten en puntos de conexión.")
25
Repetidor PLC: No siempre se utilizan, se sitúan en los cuartos de contadores de un edificio concentrando la voz y los datos de los usuarios residentes en el edificio. Si la distancia entre la cabecera PLC y el usuario es mayor de 300 metros, se hace necesario el uso de este. Pueden controlar hasta 256 modems de cliente (CPE). Equipo de Acceso de Usuario (CPE): Es el equipamiento de telecomunicaciones instalado en el domicilio del cliente final para la prestación de los servicios (Módem PLC, Routers PLC, etc). Este dispone de un puerto de datos (Ethernet / USB) en donde se conecta el equipo de datos del usuario (por ejemplo, un PC) y un puerto para la conexión de un teléfono analógico convencional. Módem de Usuario: Cada usuario deberá instalar un módem PLC para posibilitar el envío y recepción de datos por la línea eléctrica donde se conectan los equipos de transmisión de voz y datos como computadores, teléfonos, impresoras y otros dispositivos preparados (alarmas, aire acondicionado, refrigeradores, hornos microondas, etc).
. Equipo de Acceso de Usuario (CPE): Es el equipamiento de telecomunicaciones instalado en el domicilio del cliente final para la prestación de los servicios (Módem PLC, Routers PLC, etc). Este dispone de un puerto de datos (Ethernet / USB) en donde se conecta el equipo de datos del usuario (por ejemplo, un PC) y un puerto para la conexión de un teléfono analógico convencional. Módem de Usuario: Cada usuario deberá instalar un módem PLC para posibilitar el envío y recepción de datos por la línea eléctrica donde se conectan los equipos de transmisión de voz y datos como computadores, teléfonos, impresoras y otros dispositivos preparados (alarmas, aire acondicionado, refrigeradores, hornos microondas, etc).")
26
Ventajas: Sencilla instalación sin tener que cablear el hogar y sin obra. Mayor cobertura que el Wireless. Inconvenientes: Actualmente es una tecnología de coste superior al de otros soportes para redes. Si el Kit de adaptadores no es bueno, puede crear interferencias con la red eléctrica. El estado de la red eléctrica de una casa, influye en el rendimiento de la velocidad de transferencia y estabilidad de la red.

28
LADO PC Una red de computadora es un conjunto de dispositivos físicos "hardware" y de programas "software", mediante el cual podemos comunicar computadoras para compartir recursos (discos, impresoras, programas, etc.) así como trabajo (tiempo de cálculo, procesamiento de datos, etc.). A cada una de las computadoras conectadas a la red se le denomina un nodo. Los dispositivos físicos necesarios para construir una red son la tarjeta de comunicación instalada en cada una de las computadoras conectadas, el cableado que los une y los programas. Los programas de la red serán aquellos que establecen la comunicación entre las estaciones y los periféricos. Las redes difieren entre sí por los servicios que pueden prestar a los usuarios, o por el tipo comunidad de usuarios atraídos por el servicio.
 así como trabajo (tiempo de cálculo, procesamiento de datos, etc.). A cada una de las computadoras conectadas a la red se le denomina un nodo. Los dispositivos físicos necesarios para construir una red son la tarjeta de comunicación instalada en cada una de las computadoras conectadas, el cableado que los une y los programas. Los programas de la red serán aquellos que establecen la comunicación entre las estaciones y los periféricos. Las redes difieren entre sí por los servicios que pueden prestar a los usuarios, o por el tipo comunidad de usuarios atraídos por el servicio.")
29
Clasificación de una red de computadora:
Según el tamaño de la red: LAN: red de área local se conectan varios equipos con un alcance limitado por los cables o por la potencia de las antenas inalámbricas. Por ejemplo la red del instituto MAN: red área metropolitana. Red formada por un conjunto de redes LAN en las que se conectan equipos, por ejemplo los de la junta de Extremadura. WAN: red de área amplia interconectan equipos en un entorno muy amplio, como un país usando la red telefónica

30
Según el medio físico que utilicen para su conexión:
Redes alámbricas: Utilizan los cables que serán de pares trenzados y normalmente con conectores RJ45, así se utilizaran cables paralelos para conectar el ordenador al switch y cables cruzados para conectar ordenadores entre sí. Redes inalámbricas: Se realiza mediante las ondas electromagnéticas que se propagan entre una antena emisora y una receptora. Para conectar un ordenador a una red wifi es necesario por tanto una antena receptora y el software adecuado. Normalmente las redes suelen ser hibridas, es decir, redes lan que tienen conexión por cable pero en las que alguno de sus nodos es un punto de acceso wireless que permite la conexión inalámbrica de otros dispositivos wifi.

31
Existen diferentes tipos de antena wifi:
Wireless PCI: se conecta a la placa base y sale una antena por detrás del ordenador. Wirelss USB: se conecta por USB es similar a un pendrive. PCMCIA: se conecta por una ranura de expansión de los portátiles. WirelessminiPCI: Integrada en placas de portátiles. Según topología de la red: Bus o lineal: tiene un cable central con derivaciones. Estrella: todos los ordenadores están conectados a un concentrador o Hub central y no están conectados entre sí. Anillo: todos se conectan describiendo un anillo, la información llega a un ordenador si no la necesita la pasa al siguiente. Malla: cada ordenador está conectado al resto de los equipos con más de un cable.

32
Protocolos: Un protocolo de red es como un lenguaje para la comunicación de información.
Son las reglas y procedimientos que se utilizan en una red para comunicarse entre los nodos que tienen acceso al sistema de cable. Los protocolos gobiernan dos niveles de comunicaciones: Protocolos de alto nivel: Estos definen la forma en que se comunican las aplicaciones. Protocolos de bajo nivel: Estos definen la forma en que se transmiten las señales por cable. Actualmente, los protocolos más comúnmente utilizados en las redes son Ethernet, Token Ring y ARCNET. Cada uno de estos está diseñado para cierta clase de topología de red y tienen ciertas características estándar.

33
Otra forma de atacar la seguridad de la red es a través de virus.
Ventajas: Permiten compartir el hardware: periféricos (impresoras, escáners, modems, etc.), dispositivos de almacenamiento. Permiten compartir programas de aplicación y datos: la información está centralizada, siendo el sistema mucho más rápido y eficiente y se mantiene actualizada para todos los usuarios que acceden a ella. Permiten que se pueda trabajar en grupo o colaborativamente: Es decir que los usuarios de la red trabajen sobre un mismo documento o en una pizarra en forma simultánea. Desventajas: La privacidad de la información: es todo lo relativo al uso que se le da, o se hace, de la información que se tiene de los usuarios o clientes. La seguridad de la información: tiene que ver con el acceso no autorizado. Puede ser física (ingresar a las instalaciones del centro de cómputos) o lógica (software, al querer ingresar en el sistema violando nombre de usuario y contraseña). Otra forma de atacar la seguridad de la red es a través de virus.
, dispositivos de almacenamiento. Permiten compartir programas de aplicación y datos: la información está centralizada, siendo el sistema mucho más rápido y eficiente y se mantiene actualizada para todos los usuarios que acceden a ella. Permiten que se pueda trabajar en grupo o colaborativamente: Es decir que los usuarios de la red trabajen sobre un mismo documento o en una pizarra en forma simultánea. Desventajas: La privacidad de la información: es todo lo relativo al uso que se le da, o se hace, de la información que se tiene de los usuarios o clientes. La seguridad de la información: tiene que ver con el acceso no autorizado. Puede ser física (ingresar a las instalaciones del centro de cómputos) o lógica (software, al querer ingresar en el sistema violando nombre de usuario y contraseña). Otra forma de atacar la seguridad de la red es a través de virus.")
34
INTEGRACION CON BASE DE DATOS (BD)
")
35
ACCESS Una base de datos es una herramienta para recopilar y organizar información, en ellas se puede almacenar todo tipo de información. Muchas bases de datos empiezan siendo una lista en un programa de procesamiento de texto o en una hoja de cálculo. A medida que crece la lista, empiezan a aparecer repeticiones e inconsistencias en los datos. Cuando empiezan a observarse estos problemas, es aconsejable transferir la información a una base de datos creada mediante un sistema de administración de bases de datos (DBMS), como Office Access. Con Access, se puede agregar más datos a una base de datos, modificar datos existentes en la base de datos, eliminar información, organizar y ver los datos de distintas formas y compartir los datos con otros usuarios mediante informes, mensajes de correo electrónico, una intranet o Internet.
, como Office Access. Con Access, se puede agregar más datos a una base de datos, modificar datos existentes en la base de datos, eliminar información, organizar y ver los datos de distintas formas y compartir los datos con otros usuarios mediante informes, mensajes de correo electrónico, una intranet o Internet.")
36
Partes de una base de datos de Access:
Tablas: Una tabla de una base de datos es similar en apariencia a una hoja de cálculo, en cuanto a que los datos se almacenan en filas y columnas. Para lograr la máxima flexibilidad para una base de datos, la información tiene que estar organizada en tablas, para que no haya redundancias. Cada fila de una tabla se denomina registro. En los registros es donde se almacena cada información individual. Cada registro consta de campos (al menos uno). Los campos corresponden a las columnas de la tabla. Los campos se deben configurar con un determinado tipo de datos, ya sea texto, fecha, hora, numérico, o cualquier otro tipo.
. Los campos corresponden a las columnas de la tabla. Los campos se deben configurar con un determinado tipo de datos, ya sea texto, fecha, hora, numérico, o cualquier otro tipo.")
37
Formularios: conocidos tambien como "pantallas de entrada de datos"
Formularios: conocidos tambien como "pantallas de entrada de datos". Son las interfaces que se utilizan para trabajar con los datos y, a menudo, contienen botones de comando que ejecutan diversos comandos. Se puede crear una base de datos sin usar formularios, editando los datos de las hojas de las tablas. No obstante, casi todos los usuarios de bases de datos prefieren usar formularios para ver, escribir y editar datos en las tablas. Los formularios proporcionan un formato fácil de utilizar para trabajar con los datos. Además, se les puede agregar elementos funcionales, como botones de comando.

38
Informes: Los informes sirven para resumir y presentar los datos de las tablas. Normalmente, un informe responde a una pregunta específica, cada informe se puede diseñar para presentar la información de la mejor manera posible. Un informe se puede ejecutar en cualquier momento y siempre reflejará los datos actualizados de la base de datos.. Consultas: Las consultas son las que verdaderamente hacen el trabajo en una base de datos. Pueden realizar numerosas funciones diferentes. Su función más común es recuperar datos específicos de las tablas. Los datos que se desea ver suelen estar distribuidos por varias tablas y, gracias a las consultas, se los puede ver en una sola hoja de datos.

39
Hay dos tipos básicos de consultas: las de selección y las de acción:
Una consulta de selección: recupera los datos y hace que estén disponibles para su uso. Los resultados de la consulta pueden verse en la pantalla, imprimirse o copiarse al portapapeles. Una consulta de acción: realiza una tarea con los datos. Pueden servir para crear tablas nuevas, agregar datos a tablas existentes, actualizar datos o eliminar datos. Macros: Se pueden considerar como un lenguaje de programación simplificado, que se puede utilizar para aumentar la funcionalidad de la base de datos. Contienen acciones que realizan tareas, como abrir un informe, ejecutar una consulta o cerrar la base de datos.

40
Módulos: Los módulos, como las macros, son objetos que sirven para aumentar la funcionalidad de la base de datos. Mientras que las macros se crean seleccionando acciones de una lista, los módulos se escriben en el lenguaje de programación de Visual Basic para Aplicaciones (VBA). Un módulo es una colección de declaraciones, instrucciones y procedimientos que se almacenan conjuntamente como una unidad. Los módulos de clase se adjuntan a formularios o informes, y normalmente contienen procedimientos específicos del formulario o el informe al que se adjuntan. Los módulos estándar contienen procedimientos generales que no están asociados a ningún otro objeto.
. Un módulo es una colección de declaraciones, instrucciones y procedimientos que se almacenan conjuntamente como una unidad. Los módulos de clase se adjuntan a formularios o informes, y normalmente contienen procedimientos específicos del formulario o el informe al que se adjuntan. Los módulos estándar contienen procedimientos generales que no están asociados a ningún otro objeto.")
41
¿Cómo diseñar una base de datos?:
Antes de utilizar Microsoft Access para crear las tablas, los formularios y los demás objetos que formarán la base de datos, es importante invertir algún tiempo en diseñar la base de datos. Pasos para diseñar una base de datos: Determinar la finalidad de la base de datos. Determinar las tablas que se necesitan en la base de datos. Determinar los campos que se necesitan en las tablas. Identificar los campos con valores exclusivos. Determinar las relaciones entre las tablas. Precisar el diseño. Agregar datos y crear otros objetos de la base de datos. Utilizar las herramientas de análisis de Microsoft Access.

42
EXCEL Excel puede ser una forma conveniente para almacenar información como una base de datos, siempre y cuando la información no seas demasiado engorrosa para ser contenida en un formato de hoja de cálculo. Excel no es un DBMS aunque exista una gran cantidad de personas que utilicen Excel para almacenar información, Excel no tiene un servicio que controle la inserción o eliminación de los datos sino que el mismo usuario puede hacerlo directamente en la aplicación. Desventajas: Solo un usuario puede acceder a la información al mismo tiempo. Excel comenzará a ponerse lento cuando la base de datos crezca en gran manera. No es posible establecer un nivel de seguridad avanzado como para proteger ciertos datos de ciertos usuarios.

43
Crear la base de datos en Excel
Una vez que se tiene el diseño de la base de datos ya se puede crear la misma fácilmente en Excel siguiendo dos recomendaciones: Cada tabla del diseño será una tabla de Excel. Colocar cada tabla en su propia hoja de Excel. El motivo para utilizar tablas de Excel es que existen múltiples beneficios de utilizar tablas entre los cuales están los filtros y el reconocimiento automático de nuevas filas y columnas. Por otro lado, la razón por la cual colocar cada tabla en su propia hoja de Excel es para facilitar el crecimiento de los datos ya que si colocas varias tablas en una misma hoja probablemente se tenga que moverlas o redefinirlas cada vez que alguna de ellas aumente de tamaño y se sobrepongan entre sí.

44
Consultar la base de datos en Excel
Una vez que se ha creado la base de datos y comiencen a crecer los datos, saltara la necesidad de relacionar la información de diferentes tablas para obtener datos complementarios. Se puede hacer uso de las referencias estructuradas: =BUSCARV(NombreTabla1[NombreCampo], NombreTabla2, NumeroColumna, FALSO) NombreTabla1: Se coloca el nombre de la tabla donde se realiza la consulta. NombreCampo: Se coloca el nombre del campo donde se encuentra el valor buscado. NombreTabla2: Se coloca el nombre de la tabla que contiene el campo donde se quiere encontrar el valor que se busca. NumeroColumna: Se coloca el número de columna que corresponda al campo perteneciente a NombreTabla2 donde se encuentra el valor buscado y lo devuelva.
 NombreTabla1: Se coloca el nombre de la tabla donde se realiza la consulta. NombreCampo: Se coloca el nombre del campo donde se encuentra el valor buscado. NombreTabla2: Se coloca el nombre de la tabla que contiene el campo donde se quiere encontrar el valor que se busca. NumeroColumna: Se coloca el número de columna que corresponda al campo perteneciente a NombreTabla2 donde se encuentra el valor buscado y lo devuelva.")
45
ADO (Microsoft ActiveX Data Objects)
Conjunto de objetos COM para el acceso a recursos de datos. Provee una capa entre los lenguajes de programación y las bases de datos OLE, lo que permite a los programadores escribir programas que accedan a datos, sin saber cómo está implementada la base de datos (sólo se debe tener cuidado en la conexión a la misma). Es un mecanismo que utilizan los programas para comunicarse con las bases de datos. Forma parte de lenguajes como Visual Basic, Delphi, ASP, etc. La versión ADO.NET forma parte de la plataforma de programación .NET de Microsoft.
. Es un mecanismo que utilizan los programas para comunicarse con las bases de datos. Forma parte de lenguajes como Visual Basic, Delphi, ASP, etc. La versión ADO.NET forma parte de la plataforma de programación .NET de Microsoft.")
46
ADO. NET: Es un conjunto de clases para trabajar con datos
ADO.NET: Es un conjunto de clases para trabajar con datos. Una evolución más flexible de ADO, un sistema diseñado para entornos desconectados. Proporciona: Un sistema diseñado para entornos desconectados. Un modelo de programación con soporte avanzado de XML. Un conjunto de clases, interfaces, estructuras y enumeraciones que gestionan el acceso a datos desde el .NET Framework.

47
Objetos comunes de ADO.NET:
DESCRIPCION Connection Establece y gestiona una conexión a una fuente de datos específica. Command Ejecuta un comando en una fuente de datos. DataSet Diseñado para acceder a datos con independencia de la fuente de datos. En consecuencia, se puede utilizar con varias y diferentes fuentes de datos, con datos XML, o para gestionar datos locales a la aplicación. El objeto DataSet contiene una colección de uno o más objetos DataTable formados por filas y columnas de datos, además de clave principal, clave foránea, restricciones e información de la relación sobre los datos en los objetos DataTable. DataReader Proporciona un flujo de datos eficaz, sólo-reenvío y de sólo-lectura desde una fuente de datos. DataAdapter Utiliza los objetos Connection, Command y DataReader implícitamente para poblar un objeto DataSet y para actualizar la fuente de datos central con los cambios efectuados en el DataSet.

48
VB for Aplications (VBA)
VBA es un lenguaje de programación desarrollado por Microsoft para usarlo dentro de un número de productos Microsoft, incluyendo Microsoft Office. Los programadores pueden crear bases de datos en un programa, como Access e insertar los datos en la base de otra aplicación, como Excel. VBA permite a usuarios y programadores ampliar la funcionalidad de programas de la suite Microsoft Office. Visual Basic para Aplicaciones es un subconjunto casi completo de Visual Basic 5.0 y 6.0. Su utilidad principal es automatizar tareas cotidianas, así como crear aplicaciones y servicios de bases de datos para el escritorio.

49
PAGINA WEB Configuración y uso de una base de datos en una página web:
Mediante la combinación de un sitio web con una base de datos, puede pasar de un sitio estático (o con un contenido fijo), a un sitio dinámico que puede recuperar la información de la base de datos y construir una página sobre la marcha en respuesta a una petición de un usuario. Configurar y utilizar una base de datos en un sitio web requiere un sistema de base de datos del servicio de alojamiento web, páginas web que tengan el código para utilizar la base de datos, y software que proporcione el enlace entre las páginas web y la base de datos.
, a un sitio dinámico que puede recuperar la información de la base de datos y construir una página sobre la marcha en respuesta a una petición de un usuario. Configurar y utilizar una base de datos en un sitio web requiere un sistema de base de datos del servicio de alojamiento web, páginas web que tengan el código para utilizar la base de datos, y software que proporcione el enlace entre las páginas web y la base de datos.")
50
Instrucciones Instalar o activar el sistema de base de datos en el hosting del sitio web. La mayoría de los servicios de alojamiento de sitios web ofrecen un sistema de base de datos, generalmente MySQL. Crear una tabla de prueba en la base de datos. Usar una herramienta de gestión de bases de datos en línea y crear una tabla simple agregando un registro a la tabla. Escribir un programa de software para acceder a la base de datos. Con un editor de texto (como Bloc de notas) escribir un programa de software en un lenguaje compatible con el servicio de alojamiento web para acceder a la tabla de base de datos y recuperar un registro.
 escribir un programa de software en un lenguaje compatible con el servicio de alojamiento web para acceder a la tabla de base de datos y recuperar un registro.")
51
Crear una página web para invocar el programa de software
Crear una página web para invocar el programa de software. Con un editor de texto o un editor HTML que tenga código en ella para invocar el programa de software. Probar la instalación. Usando el navegador de Internet, abrir la página web y determinar si es correcto acceder y recuperar los datos de la base de datos. Hacer las correcciones necesarias. Los problemas más comunes pueden incluir que el programa de software no tenga el nombre, ubicación, contraseña de la base de datos, tabla o campos de registro correctos. Una vez que haya un trabajo de base establecido, puede personalizarse y ampliar el uso de la base de datos en el sitio web.

52
ROBOTICA

53
La Robótica es la rama de la tecnología que se dedica al diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots. La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería. Otras áreas importantes en robótica son el álgebra, los autómatas y las máquinas de estado. Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas.

54
Conceptos Básicos Mecanización: Dado que las fuerzas generadas por los seres humanos son reducidas, fue necesario inventar dispositivos que amplificaran estas fuerzas, las cuales adquirieron forma de máquinas. Las cinco máquinas más elementales son la palanca, la rueda y el eje, la polea, la cuña y el tornillo. Una máquina es el intermediario entre la potencia motriz y aquellas partes que realmente llevan a cabo los movimientos necesarios para realizar el trabajo requerido.

55
Control Automático: Es un control que actúa sólo, sin intervención humana. La mayoría de los actuales sistemas de control industrial no podrían funcionar si dependieran de operadores humanos. Automatización: Es el desempeño de operaciones automáticas dirigidas por medio de comandos programados con una medición automática de la acción, retroalimentación y toma de decisiones. Esta definición indica que parte de la automatización consiste en un programa para determinar el orden de los eventos así como para instruir al sistema sobre cómo debe llevarse a cabo uno de los pasos de la operación.

56
CLASIFICACION Subdivisión de los Robots
Poliarticulados: Bajo este grupo están los Robots de muy diversa forma y configuración cuya característica es la der ser sedentarios y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo. Ejemplo: los cartesianos, industriales o manipuladores. Móviles: Son Robots con grandes capacidades de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante.

57
Androides: Son Robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente son todavía dispositivos muy poco evolucionados y sin utilidad práctica, destinados especialmente a la experimentación. Zoomórficos: Constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres humanos. Éstos se agrupan en dos categorías: caminadores y no caminadores. Híbridos: Corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con algunas de las anteriores ya expuestas, bien sea por conjunción o yuxtaposición. Por ejemplo, robots articulados y con ruedas (conjunción) o un cuerpo formado por un carro móvil y de un brazo semejante al de los robots industriales (yuxtaposición).
 o un cuerpo formado por un carro móvil y de un brazo semejante al de los robots industriales (yuxtaposición).")
58
Clasificación de Robots según su arquitectura:
Por generación: 1º G: El sistema de control está basado en la “paradas fijas” mecánicamente. (mecanismos de relojería que mueven las cajas musicales o los juguetes de cuerda). 2º G: El movimiento se controla a través de una secuencia numérica almacenada en disco o cinta magnética. Se utiliza en la industria automotriz y son de gran tamaño. 3º G: Utilizan las computadoras para su control y tienen cierta percepción de su entorno a través del uso de sensores. 4º G: Se trata de robots altamente inteligentes con más y mejores extensiones sensoriales, para entender sus acciones y captar el mundo que los rodea. Incorporan conceptos “modélicos” de conducta. 5º G: Actualmente en desarrollo. Esta nueva generación de robots basará su acción principalmente en modelos conductuales establecidos.
. 2º G: El movimiento se controla a través de una secuencia numérica almacenada en disco o cinta magnética. Se utiliza en la industria automotriz y son de gran tamaño. 3º G: Utilizan las computadoras para su control y tienen cierta percepción de su entorno a través del uso de sensores. 4º G: Se trata de robots altamente inteligentes con más y mejores extensiones sensoriales, para entender sus acciones y captar el mundo que los rodea. Incorporan conceptos modélicos de conducta. 5º G: Actualmente en desarrollo. Esta nueva generación de robots basará su acción principalmente en modelos conductuales establecidos.")
59
Según su Arquitectura Generacional:
Robots Play-back: regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco, comúnmente tienen un control de lazo abierto. Robots controlados por sensores: estos tienen un control en lazo cerrado de movimientos manipulados, y hacen decisiones basados en datos obtenidos por sensores. Robots controlados por visión: los robots pueden manipular un objeto al utilizar información desde un sistema de visión. Robots controlados adaptablemente: los robots pueden automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores. Robots con Inteligencia Artificial: las robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas

60
Robots médicos: fundamentalmente, prótesis para disminuidos físicos que se adaptan al cuerpo y están dotados de potentes sistemas de mando. Con ellos se logra igualar al cuerpo con precisión los movimientos y funciones de los órganos o extremidades que suplen. Androides: robots que se parecen y actúan como seres humanos. Los robots de hoy en día vienen en todas las formas y tamaños. Robots móviles: provistos de patas, ruedas u orugas que los capacitan para desplazarse de acuerdo su programación. Elaboran la información que reciben a través de sus propios sistemas de sensores y se emplean en determinado tipo de instalaciones industriales, sobre todo para el transporte de mercancías en cadenas de producción y almacenes. También se utilizan robots de este tipo para la investigación en lugares de difícil acceso o muy distantes, como es el caso de la exploración espacial y las investigaciones o rescates submarinos.

61
Por Nivel de Inteligencia:
Dispositivos de manejo manual: controlados por una persona. Robots de secuencia arreglada. Robots de secuencia variable: donde un operador puede modificar la secuencia fácilmente. Robots regeneradores: donde el operador humano conduce el robot a través de la tarea. Robots de control numérico: donde el operador alimenta la programación del movimiento, hasta que se enseñe manualmente la tarea. Robots inteligentes: los cuales pueden entender e interactuar con cambios en él.

62
Por Nivel de Control: Nivel de Inteligencia Artificial: donde el programa aceptará un comando como "levantar el producto" y descomponerlo dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas. Nivel de modo de control: donde los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados. Niveles de servosistemas: donde los actuadores controlan los parámetros de los mecanismos con el uso de una retroalimentación interna de los datos obtenidos por los sensores, y la ruta es modificada sobre la base de los datos que se obtienen de sensores externos. Todas las detecciones de fallas y mecanismos de corrección son implementados en este nivel.

63
Por Lenguaje de Programación:
En la clasificación final se considerara el nivel del lenguaje de programación. La clave para una aplicación efectiva de los robots para una amplia variedad de tareas, es el desarrollo de lenguajes de alto nivel. Los sistemas de programación de robots caen dentro de tres clases: Sistemas guiados, en el cual el usuario conduce el robot a través de los movimientos a ser realizados. Sistemas de programación de nivel-robot, en los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado. Sistemas de programación de nivel-tarea, en el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.

64
Clasificación del robot industrial
Manipuladores: Son sistemas mecánicos multifuncionales, con un sencillo sistema de control, que permite gobernar el movimiento de sus elementos, de los siguientes modos: Manual: Cuando el operario controla directamente la tarea del manipulador. De secuencia fija: cuando se repite, de forma invariable, el proceso de trabajo preparado previamente. De secuencia variable: Se pueden alterar algunas características de los ciclos de trabajo. Existen muchas operaciones básicas que pueden ser realizadas óptimamente mediante manipuladores, se deben emplear estos dispositivos, cuando las funciones de trabajo sean sencillas y repetitivas.

65
Robots de repetición o aprendizaje: Son manipuladores que se limitan a repetir una secuencia de movimientos, previamente ejecutada por un operador humano, haciendo uso de un controlador manual o un dispositivo auxiliar. Los robots de aprendizaje son los más conocidos, hoy día, en los ambientes industriales y el tipo de programación que incorporan, recibe el nombre de "gestual". Robots con control por computador: Son manipuladores o sistemas mecánicos multifuncionales, controlados por un computador o un microordenador. El programador no necesita mover el elemento de la máquina, cuando la prepara para realizar un trabajo. El control por computador dispone de un lenguaje específico, compuesto por varias instrucciones adaptadas al robot, con las que se puede confeccionar un programa de aplicación utilizando solo el terminal del computador, no el brazo. A esta programación se le denomina textual y se crea sin la intervención del manipulador.

66
Robots inteligentes: Son similares a los del grupo anterior, además son capaces de relacionarse con el mundo que les rodea a través de sensores y tomar decisiones en tiempo real (auto programable). Son muy poco conocidos en el mercado y se encuentran en fase experimental. La visión artificial, el sonido de máquina y la inteligencia artificial, son las ciencias que más están estudiando para su aplicación en los robots inteligentes. Micro-robots: Con fines educacionales, de entretenimiento o investigación, existen numerosos robots de formación o micro-robots a un precio muy asequible y, cuya estructura y funcionamiento son similares a los de aplicación industrial.

67
MORFOLOGIA Elementos del Robot: Articulaciones Eslabones Cuerpo Brazo
Muñeca Gripper

68
Parámetros del Robot Industrial:
GDL (Grados de libertad): Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior. Espacio o volumen de trabajo: Es el alcance de la pinza del robot. El volumen de trabajo de un robot se refiere únicamente al espacio dentro del cual puede desplazarse el extremo de su muñeca. Capacidad de carga: El peso, en kilogramos, que puede transportar el manipulador. En modelos de robots industriales, la capacidad de carga de la garra, puede oscilar de entre 300 kg. y 0.9Kg. Es una de las características que más se tienen en cuenta en la selección de un robot, según la tarea a la que se destine. En soldadura y mecanizado es común precisar capacidades de carga superiores a los 50kg.
: Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior. Espacio o volumen de trabajo: Es el alcance de la pinza del robot. El volumen de trabajo de un robot se refiere únicamente al espacio dentro del cual puede desplazarse el extremo de su muñeca. Capacidad de carga: El peso, en kilogramos, que puede transportar el manipulador. En modelos de robots industriales, la capacidad de carga de la garra, puede oscilar de entre 300 kg. y 0.9Kg. Es una de las características que más se tienen en cuenta en la selección de un robot, según la tarea a la que se destine. En soldadura y mecanizado es común precisar capacidades de carga superiores a los 50kg.")
69
Velocidad: Se suele dar en articulares y en cartesianas.
A menudo aceleración/des. consume gran parte del tiempo de ciclo (no solo importante peak speed). Repetibilidad: Grado de exactitud en la repetición de un movimiento. Se mide en el error máximo cometido en el posicionamiento de un robot en un mismo punto. Precisión: Capacidad de un robot de situar el extremo de su muñeca en un punto determinado del espacio de trabajo. Se mide el error máximo cometido. Normalmente hay más precisión cerca de la base, tanto por razones geométricas como mecánicas. La carga afecta a la precisión.
. Repetibilidad: Grado de exactitud en la repetición de un movimiento. Se mide en el error máximo cometido en el posicionamiento de un robot en un mismo punto. Precisión: Capacidad de un robot de situar el extremo de su muñeca en un punto determinado del espacio de trabajo. Se mide el error máximo cometido. Normalmente hay más precisión cerca de la base, tanto por razones geométricas como mecánicas. La carga afecta a la precisión.")
70
Estructura Mecánica: En un sistema mecánico se distingue:
Órgano Terminal (End-Effector, pinza, garra…) Brazo articulado (eslabones + articulaciones) Vehículo (En R.Móvil, escasos en RI) Sensores: Sensores Internos: Se utilizan para el control de posición y velocidad de las distintas articulaciones del robot. Sensores Externos: se usan para el control de la célula de trabajo. Se utilizan para coordinar la operación de los robots con otros elementos de la célula y/o reaccionar inteligentemente a los cambios del entorno (obstáculos, presencia de una pieza, etc.).
 Brazo articulado (eslabones + articulaciones) Vehículo (En R.Móvil, escasos en RI) Sensores: Sensores Internos: Se utilizan para el control de posición y velocidad de las distintas articulaciones del robot. Sensores Externos: se usan para el control de la célula de trabajo. Se utilizan para coordinar la operación de los robots con otros elementos de la célula y/o reaccionar inteligentemente a los cambios del entorno (obstáculos, presencia de una pieza, etc.).")
71
Configuración: combinación de articulaciones

72
Estructura Mecánica de un Robot

73
PROYECTO

74
El trabajo correcto con bases de datos relacionales se divide en dos grandes pasos o etapas bien diferenciadas entre sí: En la primera etapa se diseña la tabla con sus campos, llaves y condiciones especiales, luego se usa un paquete o programa de software especializado en la construcción, mantenimiento y administración de la base de datos, este software se usa para convertir la tabla o tablas ya bien diseñadas en un archivo en disco. La segunda etapa consiste en construir la aplicación o aplicaciones que ya tendrán acceso o podrán manipular los datos contenidos en la tabla, estas aplicaciones se escriben usando ya sea lenguajes clásicos de programación como BASIC, PASCAL, COBOL, CBUILDER, DELPHI, JAVA, VBSCRIPT, PERL, JSCRIPT, CSHARP, etc. Para poder acceder a una base de datos hecha en Access a través de Visual Studio, dicha base de datos tiene que estar ya creada con todas sus tablas, campos, claves principales y relaciones bien definidos además de estar cargada con datos.

75
A través de Visual Studio se podrá acceder a la base de datos, adicionar, modificar y eliminar los datos de dicha base. Para poder acceder a la base de datos ésta debe estar abierta al igual que Visual Studio. Posteriormente en la pestaña Herramientas se hace clic y luego Agregar nuevo origen de datos como muestra la siguiente imagen:

76
Y se abrirá la siguiente ventana:
Se elige Base de Datos y se hace clic en Siguiente, después saldrá la siguiente ventana como muestra la siguiente imagen:

77
Hacer clic en Nueva Conexión y saldrá la siguiente ventana:
Se escoge Conjunto de datos y se hace clic en el botón Siguiente he inmediatamente saldrá la siguiente ventana: Hacer clic en Nueva Conexión y saldrá la siguiente ventana:

78
Hacer clic en el botón cambiar: y saldrá otra ventana en la cual se selecciona Archivo de base de datos de Microsoft Access, luego clic en el botón aceptar como muestra en la siguiente imagen: Después de hacer clic en Aceptar se vuelve a la ventana anterior en la cual se hace clic en el botón Examinar para escoger la base de datos:

79
Al hacer clic en Examinar saldrá la siguiente ventana:
Ahora se escoge la base de datos de interés y se hace clic en el botón Abrir, después saldrá la siguiente ventana la cual se escribe la contraseña y el usuario si es que la base de datos la tiene, caso contrario simplemente se clic en Aceptar:

80
Luego saldrá la siguiente ventana en la que se selecciona las tablas que se quiera:
Por ultimo clic en Finalizar y ya está en los orígenes de datos, ahora solo se tiene que arrastras desde orígenes de datos la tabla al formulario como muestra la siguiente imagen:

81
GRACIAS…

Presentaciones similares