Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Elección de un sensor Magnitud a medir: Características de salidas:
Factores a considerar: Magnitud a medir: •Margen de medida •Resolución •Exactitud deseada •Estabilidad •Tiempo de respuesta •Ancho de banda •Magnitudes interferentes Características de salidas: Sensibilidad Tipo: tensión, corriente, frecuencia Forma de señal: unipolar, flotante, diferencial Impedancia Destino: presentación analógica Conversión digital Telemedida ¿tipo?

2
Características de alimentación:
Tensión Corriente Potencia disponible Frecuencia (si alterna) Estabilidad Características ambientales: Margen de temperatura Humedad Vibraciones Protección Agentes químicos Entorno electromagnético Otros factores: Peso Dimensiones Vida media Coste de adquisición Disponibilidad Tiempo de instalación Tipo de conector Situación en caso de fallo Longitud de cable necesaria Coste de verificación Coste de mantenimiento Coste de sustitución
 Estabilidad. Características ambientales: Margen de temperatura. Humedad. Vibraciones. Protección Agentes químicos. Entorno electromagnético. Otros factores: Peso. Dimensiones. Vida media. Coste de adquisición. Disponibilidad. Tiempo de instalación. Tipo de conector. Situación en caso de fallo. Longitud de cable necesaria. Coste de verificación. Coste de mantenimiento. Coste de sustitución.")
3
Características estáticas
En la mayor parte de los sistemas de medida, la variable de interés varía tan lentamente que basta conocer las características estáticas de los sensores. También se aplican a todo instrumento de medida. Exactitud, Fidelidad, Sensibilidad

4
Exactitud Exactitud: (Accuracy): Grado en que la indicación de un instrumento se aproxima al valor verdadero de la magnitud medida. También se le llama precisión. Valor exacto o verdadero: El que se obtiene por un método en el que los expertos coinciden como que es suficientemente exacto para el fin perseguido. La exactitud de un sensor se determina mediante calibración estática, esto es, variando lentamente la entrada y tomando valores: curva de calibración. Para conocer la magnitud de entrada hace falta un patrón de referencia. Su valor debe conocerse con una exactitud al menos diez veces mayor que la del sensor que se calibra.

5
Errores y especificación
Error: discrepancia entre la indicación del instrumento y el verdadero valor de la magnitud medida. Error absoluto: resultado de medir – valor verdadero. Error relativo: cociente entre el error absoluto y el valor verdadero. Se expresa como: • % de la lectura, •% del fondo de escala o un Nº de “cuentas” en el caso de instrumentos digitales.

6
Índice de clase: Todos los sensores de una misma clase tienen un error en la medida dentro de su alcance nominal y en condiciones establecidas, que no supera un valor concreto, denominado índice de clase. Este es el error de medida porcentual, referido a un valor convencional que es la amplitud del margen de medida o el valor superior de dicho alcance. Así, un sensor de posición de clase 0,2 y un alcance de 10 mm, en las condiciones ambientales de referencia, tiene un error inferior a: 0.2% de 10 mm, esto es 0.02 mm o 20 m al medir cualquier posición dentro del alcance. Compatibilidad entre resultado y error: El resultado numérico no debe tener mas cifras de las que se pueden considerar válidas en función de la incertidumbre sobre el resultado. Así, al medir T ambiente, un resultado de la forma 20ºC±1ºC es correcto. Sin embargo no lo son, 20ºC±0.1ºC ;20.5ºC±1ºC; 20.5ºC±10%.

7
Fidelidad Fidelidad, (fidelity): Cualidad de dar el mismo valor al medir varias veces en las mismas condiciones. x Valor exacto, V.E. Valor medio de los resultados •Hay gran exactitud y baja fidelidad. V.E. •Hay gran fidelidad y baja exactitud.

8
Repetibilidad Repetibilidad: (Repetibility) Se refiere a la fidelidad, pero cuando las medidas se realizan en un corto período de tiempo. Reproducibilidad, (Reproducibility), Indica el grado de coincidencia de varias medidas individuales cuando se determina el mismo parámetro con un método concreto pero con un conjunto de medidas a largo plazo o realizadas por personas distintas o con distintos aparatos o en diferentes laboratorios. Cuantitativamente es el valor por debajo del cual se encuentra el valor absoluto de la diferencia entre dos valores individuales con una probabilidad especificada. Se suele tomar el 95%.
, Indica el grado de coincidencia de varias medidas individuales cuando se determina el mismo parámetro con un método concreto pero con un conjunto de medidas a largo plazo o realizadas por personas distintas o con distintos aparatos o en diferentes laboratorios. Cuantitativamente es el valor por debajo del cual se encuentra el valor absoluto de la diferencia entre dos valores individuales con una probabilidad especificada. Se suele tomar el 95%.")
9
Sensibilidad Sensibilidad: (Sensitivity). Es la pendiente de la curva de calibración. Puede ser constante o no a lo largo de la escala. También se llama factor de escala. Para un sensor cuya salida esté relacionada con la entrada según la ley y=f(x), la sensibilidad en el punto Xa es: S(Xa)=dy/dx. Interesa alta sensibilidad y constante. Derivas: (Drift), cuando los sensores dan una variación de la salida con el tiempo. Se considera la deriva de cero, que da una variación de la salida con entrada nula y deriva del factor de escala, que expresa la variación de la sensibilidad
. Es la pendiente de la curva de calibración. Puede ser constante o no a lo largo de la escala. También se llama factor de escala. Para un sensor cuya salida esté relacionada con la entrada según la ley y=f(x), la sensibilidad en el punto Xa es: S(Xa)=dy/dx. Interesa alta sensibilidad y constante. Derivas: (Drift), cuando los sensores dan una variación de la salida con el tiempo. Se considera la deriva de cero, que da una variación de la salida con entrada nula y deriva del factor de escala, que expresa la variación de la sensibilidad.")
10
Resolución Resolución: (Resolution), Es el menor cambio en la magnitud de entrada que se puede detectar a la salida. Determinación del error en lectura en equipos de medidas: la mayoría de los equipos de medidas e instrumentos de laboratorio, están acompañados de manuales que vienen en inglés. A veces no resulta fácil entender los términos y aplicarlos a la determinación del error de una lectura concreta.

11
Error en la instrumentación
Algunos errores de medidas los provoca el propio instrumento. Estos errores deberían ser facilitados por el fabricante bajo las condiciones indicadas en la especificación. Para especificar el error en la instrumentación se necesitan siempre dos componentes: Una porción del valor medido (error en ganancia, debido a la amplificación). Un valor de offset (error de cero) especificado como porción del rango completo; esta componente es crítica cuando se mide en la parte baja del rango. Precisión = ±(% lectura + % rango) ±(% error de ganancia + % error de offset)
. Un valor de offset (error de cero) especificado como porción del rango completo; esta componente es crítica cuando se mide en la parte baja del rango. Precisión = ±(% lectura + % rango) ±(% error de ganancia + % error de offset)")
12
Ejemplo 1 Un instrumento que mide tensión en el rango de 200 mV, posee las siguientes especificaciones: Especificaciones para el Keithley 617 (VOLTS) RANGE RESOLUTION ACCURACY (1 Yr) TEMPERATURE 18º-28º COEFFICIENTE ±(% rdg + counts) ºC & 28-50ºC ±(% rdg + counts)/ºC 200 mV V Error en lectura de mV a 25 ºC: ±0.07 mV:
 RANGE RESOLUTION ACCURACY (1 Yr) TEMPERATURE. 18º-28º COEFFICIENTE. ±(% rdg + counts) 0-18ºC & 28-50ºC. ±(% rdg + counts)/ºC. 200 mV 10 V Error en lectura de mV a 25 ºC: ±0.07 mV:")
13
63.62x(0.05/100) mV + 4 x 10 V = mV mV = 0.07 mV. 1 count = 1 cuenta = resolución en el rango de medida. Si la medida se hace a 35 ºC hay que tener en cuenta la variación por temperatura desde 28 a 35 ºC. Esto es: (63.62x(0.004/100) mV + 3 x 10 V)x7 /ºC = 0.23 mV: En total, 0.07 mV mV = 0.3 mV 63.62 ±0.07 mV ±0.3 mV
 mV + 3 x 10 V)x7 /ºC = 0.23 mV: En total, 0.07 mV mV = 0.3 mV ±0.07 mV 63.6±0.3 mV.")
14
Ejemplo 2 En una tarjeta de adquisición de datos de 12 bits, en el rango de 2V, la precisión viene dada por: Precisión = ±(% lectura + % rango) ± ruido ±(0.01 % lectura + 1 LSB) ± 1LSB Determinar la incertidumbre, I, midiendo 0.5V. LSB, bits menos significativo. Se determina dividiendo el rango entre En este caso Vale 2/4096 = mV (0.024 % del rango) (Resolution) Cálculo: I = ±(0.0001x0.5V + 2/4096) ± 2/4096 = ±( V V) ± V =±( V) ± V =± mV
 ± ruido. ±(0.01 % lectura + 1 LSB) ± 1LSB. Determinar la incertidumbre, I, midiendo 0.5V. LSB, bits menos significativo. Se determina dividiendo el rango entre 212. En este caso. Vale 2/4096 = mV (0.024 % del rango) (Resolution) Cálculo: I = ±(0.0001x0.5V + 2/4096) ± 2/4096. = ±( V V) ± V. =±( V) ± V. =± mV.")
15
Ejemplo 3 En un multimetro de 4 ½ dígitos en rango 2V, la precisión, P, viene dada por: P = ±(0.03% de la lectura % del rango). Determinar la incertidumbre, I, para una entrada de 0.5V. I = ±(0.03% x 0.5V % x 2.0V) = ± ( V V) = ± 350 V Lectura = a
 = ± ( V V) = ± 350 V. Lectura = a")
16
Medidores de Temperaturas y características
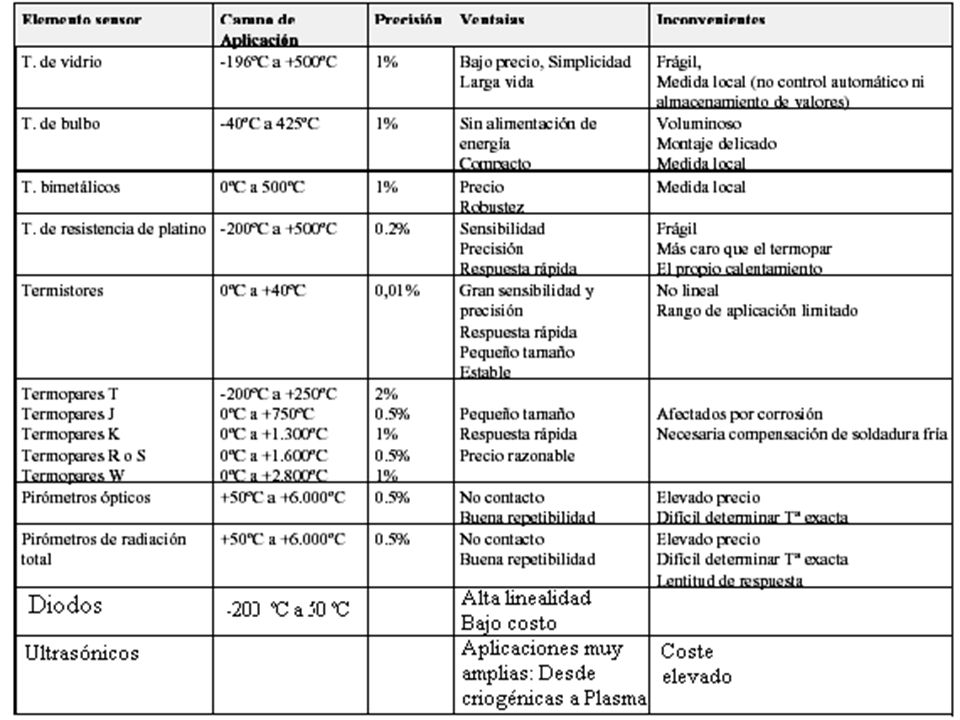
Se presentan algunos de los medidores principales de temperaturas. No están todos los que existen en el mercado aunque si los principales. Aquí analizaremos para nuestras aplicaciones en el laboratorio los siguientes: RTD TERMISTORES TERMOPARES DIODOS Veremos las bases físicas del funcionamiento de otros sensores de temperaturas.

18
RTD RTD, Resistance Temperature Detector. PT100 y Ni
Variación de la resistencia de un conductor con la temperatura. Se monta con 4 hilos. Se necesitan dos canales. R = R0 (1 +1T + 2 T2 + ·······+ n Tn). Hasta 650 ºC el término lineal es más de 10 veces mayor que el 2 T2. En su margen lineal se puede escribir: R = R0 (1 +1T). Las PT100 son fiables y exactas. Los coeficientes 1 y 2 valen aproximadamente 3.90x10-3 /K y -5.83x10-7 /K2
. Hasta 650 ºC el término lineal es más de 10 veces mayor que el 2 T2. En su margen lineal se puede escribir: R = R0 (1 +1T). Las PT100 son fiables y exactas. Los coeficientes 1 y 2 valen aproximadamente 3.90x10-3 /K y -5.83x10-7 /K2.")
19
Esquema RTD Rango de aplicación del platino: -200 ºC a 500 ºC
Precisión: 0.2 % Sensibilidad: ohmios/ºC

20
Termistores TERMISTORES Thermally Sensitive Resistor (Thermistor)
PTC, Positive Temperature Coefficient NTC, Negative Temperature Coefficient •NTC, al aumentar T, lo hace el Nº de portadores por rotura de enlaces. Aumenta la conductividad y disminuye la resistividad. El resultado final es una disminución de la resistencia. •Los Termistores están hecho de ciertos semiconductores. Como se sabe la resistencia de los semiconductores depende de T. •PTC, Si el dopado es muy intenso el semiconductor adquiere propiedades metálicas, en ese caso tenemos un aumento de la R con T.

21
Propiedades Alta sensibilidad, 100 ohmios/grado
No lineal R(T) = R(To) exp{-B(1/T – 1/To}. Linealizar en torno al punto de trabajo. Rango de temperatura pequeño. Útil para temperaturas ambientes. Muy baratos y pequeños. Menos precisión (Tampoco interesa a veces) Problemas de estabilidad. Se montan en tarjetas A/D como resistencia de dos hilos. Ocupan un canal.
 = R(To) exp{-B(1/T – 1/To}. Linealizar en torno al punto de trabajo. Rango de temperatura pequeño. Útil para temperaturas ambientes. Muy baratos y pequeños. Menos precisión (Tampoco interesa a veces) Problemas de estabilidad. Se montan en tarjetas A/D como resistencia de dos hilos. Ocupan un canal.")
22
Termopares · Sensores activos. Usan el efecto Seebeck: circula una corriente cuando dos hilos de metales distintos se unen y se calienta uno de los extremos. · Se puede medir el voltaje, que es proporcional a la diferencia de temperaturas · Señal de salida muy baja. Necesita acondicionamiento de la señal. · Sensibilidad baja: microvoltios por grado · Aguantan altas temperaturas (p.e. calderas) · Bastante lineales
 · Bastante lineales.")
23
d.d.p. Ve M2 M1 Si T aumenta se favorece la difusión de portadores de 1 a 2, aumentando Ve.

24
Tipos de termopares Rango: -100ºC a +1000ºC , Precisión: ±0.5 ºC
Termopar E: Cromel y Constatan Rango: -100ºC a +1000ºC , Precisión: ±0.5 ºC Termopar J: Hierro y Constatan Afectado por corrosión, Rango: 0ºC a +750ºC , Precisión: ±0.1ºC Termopar K: Cromo y Alumel Buena resistencia a la oxidación Rango: 0ºC a ºC y 600ºC a 1.000ºC en atmósferas oxidantes Precisión: ± 1ºC Termopar R: Platino y Platino-13% Rodio. Rango: 0ºC a ºC , Precisión: ± 0.5ºC Termopar S: Platino y Platino-10% Rodio. Rango de medida más amplio (0ºC a ºC), pero más caros. Termopar W: Volframio-5% Renio y Volframio-26% Renio. Rango: 0ºC a ºC en atm. inertes o vacío. Termopar T: Cobre y Constatan Rango: -160ºC a +400ºC Precisión: ± 0.5ºC Termopar N: Nicrosi (Ni-Cr-Si)_Nisi (Ni-Si-Mg) Rango (-270ºC a 1300ºC)
, pero más caros. Termopar W: Volframio-5% Renio y Volframio-26% Renio. Rango: 0ºC a ºC en atm. inertes o vacío. Termopar T: Cobre y Constatan. Rango: -160ºC a +400ºC. Precisión: ± 0.5ºC. Termopar N: Nicrosi (Ni-Cr-Si)_Nisi (Ni-Si-Mg) Rango (-270ºC a 1300ºC)")
25
Compensación de la unión
La compensación de la unión de referencia se puede hacer, por ejemplo introduciéndola en una mezcla de hielo fundente. Esto resulta caro de mantener aunque bastante exacto. Resulta mas económico la compensación electrónica. M1 M2 Temperatura caliente Temperatura de referencia Hielo fundente Existen integrados que miden T ambiente y ofrecen compensación para los distintos termopares. En la compensación electrónica de la unión de referencia se miden las variaciones de temperatura ambiente con otro sensor y se suma una tensión igual a la generada en la unión fria, (CJC)
")
26
Diodos De forma aproximada la corriente en un diodo viene dada por la expresión: Se observa que si se mantiene constante I, entonces V es proporcional a T: V = Vo – C·T Una manera de conseguirlo es usar una fuente de corriente. También se puede conectar una resistencia en serie varios ordenes de magnitud mayor que la resistencia del diodo. En la figura siguiente se muestra un esquema del circuito a montar.

27
Figura

28
Integrados Se encuentran en el mercado circuitos integrados de estado sólido que son muy adecuados para medir temperaturas. En particular estos circuitos son muy útiles para medir temperaturas cuando se usa un sistema de toma de datos conectado en una computadora. Estos circuitos, por lo general tienen tres patas: tierra, alimentación (Vc entre 5 a 15V) y una salida, similar a como se muestra en el esquema. Estos circuitos producen una señal muy lineal y calibrada. Por lo general producen ente 1 y 10 mV/K. Existen integrados con calibraciones para diversos sistemas de unidades. El rango usual de estos termómetro esta típicamente entre los -10ºC y 120ºC.
 y una salida, similar a como se muestra en el esquema. Estos circuitos producen una señal muy lineal y calibrada. Por lo general producen ente 1 y 10 mV/K. Existen integrados con calibraciones para diversos sistemas de unidades. El rango usual de estos termómetro esta típicamente entre los -10ºC y 120ºC.")
29
Ultrasonidos •Los ultrasonidos son radiaciones mecánicas de frecuencia superiores a 20 kHz. Toda radiación al incidir sobre un objeto, en parte se refleja, se transmite y en parte se absorbe. Si además hay un movimiento relativo entre la fuente emisora de radiación y el reflector se produce un cambio de frecuencia de la radiación (Efecto Doppler). • Todas esta propiedades de la interacción radiación-objeto han sido aplicadas a la medida de diversas magnitudes físicas, entre otras las temperaturas. • Las medidas de magnitudes físicas con ultrasonidos están relacionadas con la velocidad de la radiación, tiempo de propagación, atenuación o interrupción del haz propagado.
. • Todas esta propiedades de la interacción radiación-objeto han sido aplicadas a la medida de diversas magnitudes físicas, entre otras las temperaturas. • Las medidas de magnitudes físicas con ultrasonidos están relacionadas con la velocidad de la radiación, tiempo de propagación, atenuación o interrupción del haz propagado.")
30
• Algunos de los parámetros, como la velocidad del sonido, dependen de la temperatura del medio donde se propaga la radiación, de manera que midiendo el tiempo de ida y retorno del ultrasonido se puede obtener información de la temperatura de un objeto de manera precisa. Así se mide la temperatura del agua de los oceanos, o de gases emitidos en chimeneas, etc. • Las aplicaciones de los ultrasonidos es amplísima. Permiten medir desde temperaturas criogénicas a niveles de plasma. • Además de temperaturas, se pueden medir caudales, niveles de líquidos, detectores de proximidad, enfoque automáticos de cámaras, densidad de gases y líquidos, etc.

31
Pirómetros · Se basan en la ley de Stefan-Boltzmann: todas las sustancias a cualquier T por encima del cero absoluto, radian energía como resultado de la agitación atómica asociada con su Tª. La intensidad de la energía radiante emitida por la superficie de un cuerpo aumenta proporcionalmente a la cuarta potencia de la Tª absoluta del cuerpo: W= K T4. · Consisten en un sistema óptico que recoge la energía radiada y la concentra en un detector, el cual genera una señal proporcional a la T. · La energía radiada por un cuerpo es menor que la correspondiente a su T, debido a que refleja energía como consecuencia del estado de su superficie. · Por ello es necesario definir un cuerpo radiador ideal que no refleje nada (emite el máximo de energía por unidad de superficie): "cuerpo negro". · Para corregir la medida se define el factor de emisividad: relación entre la energía emitida por un cuerpo y la emitida por el cuerpo negro. · Los pirómetros son usados: - cuando no se pueden utilizar termopares (rango, ambiente agresivo). - cuando el área a medir se mueve o tiene difícil acceso.
: cuerpo negro . · Para corregir la medida se define el factor de emisividad: relación entre la energía emitida por un cuerpo y la emitida por el cuerpo negro. · Los pirómetros son usados: - cuando no se pueden utilizar termopares (rango, ambiente agresivo). - cuando el área a medir se mueve o tiene difícil acceso.")
32
Pirómetros ópticos Se basan en el hecho de comparar visualmente la luminosidad del objeto radiante con el filamento de una lámpara incandescente. Para ello se superponen ambas ondas luminosas y se varía la corriente eléctrica de la lámpara hasta que deja de ser apreciable a la vista. La variación de la corriente nos da un valor de la Tª, pero hay que calibrar la luminosidad de la lámpara previamente. Trabajan en la banda de ondas visibles: 0,45 micras (violeta) – 0,75 micras (rojo)
 – 0,75 micras (rojo)")
33
Sensores resistivos de posición, desplazamiento y esfuerzos
Potenciómetros galgas extensiométricos magnetorresistencias Potenciómetros: Sirven para medir posiciones, desplazamientos. La tensión de salida Vo depende de la posición del contacto.

34
Joysticks Es un modelo de doble potenciómetro que sirve para determinar la posición de un punto en un plano. El movimiento en OX lo controla Rx y en OY el potenciómetro Ry. Se puede demostrar fácilmente que Vx = VT (1 - 2) y Vy = VT (1-2) donde y son dos parámetros que representan respectivamente los cocientes entre las longitudes “x/l” para Rx e “y/l” para Ry. Por tanto estos parámetros varían entre 0 y 1. Se supone que ambas resistencias tienen una longitud l. Cuando estamos en el centro del plano las tensiones de salidas son (0,0) V.
 y Vy = VT (1-2) donde y son dos parámetros que representan respectivamente los cocientes entre las longitudes x/l para Rx e y/l para Ry. Por tanto estos parámetros varían entre 0 y 1. Se supone que ambas resistencias tienen una longitud l. Cuando estamos en el centro del plano las tensiones de salidas son (0,0) V.")
35
Galgas extensiométricas
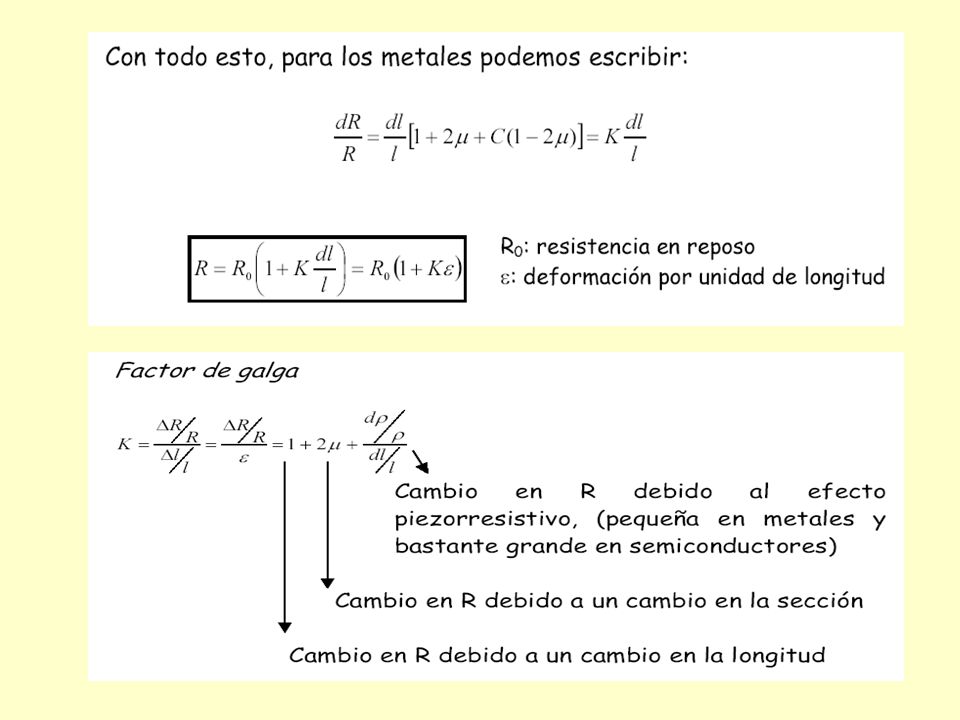
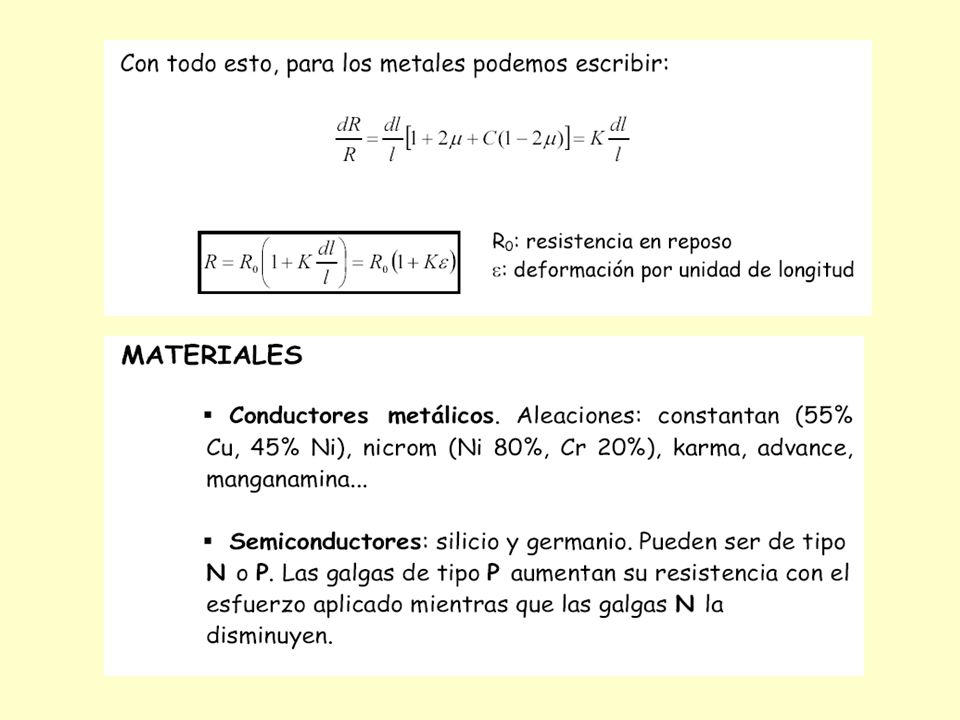
(Strain gauge or gage) PRINCIPIO FISICO: Efecto Piezorresistivo Se basan en la variación de resistencia de un conductor o un semiconductor cuando es sometido a un esfuerzo mecánico. Hilo metálico: Al aplicar tensiones mecánicas la resistencia variará de la forma:
 PRINCIPIO FISICO: Efecto Piezorresistivo. Se basan en la variación de resistencia de un conductor o un semiconductor cuando es sometido a un esfuerzo mecánico. Hilo metálico: Al aplicar tensiones mecánicas la resistencia variará de la forma:")
36
Se deforma una cierta cantidad, :
Cuando se estira un hilo o un material mediante una tensión mecánica, , dado por: Se deforma una cierta cantidad, : El aspecto de la curva que da la relación entre esfuerzo o tensión mecánica y deformación es: OA, zona elástica. B, punto de fluencia C, Resistencia máxima D, ruptura

37
En la zona elástica se definen los módulos de Young, E, y de Poisson, , dados por las expresiones:
t, es la dimensión transversal del hilo y l su longitud. Para un hilo conductor de sección D

38
La variación de su resistencia, R, resulta ser:

42
En la dirección www. amidata
En la dirección se pueden ver las características técnicas de las diferentes galgas.

43
Preparación de la galga

44
Puente de Wheatstone El Puente de Wheatstone es el circuito fundamental para medir esfuerzos. En la figura se presenta la configuración de ¼ de puente, que es cuando uno de los brazos es la galga activa. Adecuado en la mayoría de los casos que no requieran gran precisión.

45
VOUT = VIN ( R2/(R1+R2) - R3/(R3+Rg) )
Cuando (R1/R2) = (Rg/R3), VOUT se hace cero y el puente está balanceado. Para ello se ajusta R2 (potenciometro) hasta conseguir que VOUT sea cero cuando Rg no está sometida a esfuerzo. Las resistencias restantes pueden ser galgas no sometidas a esfuerzos. Incluso todas pueden ser galgas.
 = (Rg/R3), VOUT se hace cero y el puente está balanceado. Para ello se ajusta R2 (potenciometro) hasta conseguir que VOUT sea cero cuando Rg no está sometida a esfuerzo. Las resistencias restantes pueden ser galgas no sometidas a esfuerzos. Incluso todas pueden ser galgas.")
46
Si, cuando la galga no está estresada, ajustamos R2 hasta que el puente está balanceado y entonces aplicamos un esfuerzo a la galga, el cambio en Rg debido al esfuerzo desequilibra el puente y VOUT será distinto de cero. Si ajustamos el puente de nuevo, hasta balancearlo dará un valor nuevo de R2. El cambio en R2 será debido al cambio en la resistencia Rg de la galga. En esto se basan algunos indicadores de esfuerzos para conociendo el factor de galga dar directamente el cambio en Rg en valores de esfuerzo o en micro-esfuerzos. La galga aumenta de resistencia respecto al valor nominal (no estresada) en una cantidad: Rg = R+D R El cambio que necesitamos medir es la fracción de cambio en la resistencia de la galga desde el valor en la que la galga no está estresada a cuando lo está: - D R/R. Suponiendo R1=R2=R3=R, la relación entre VOUT y VIN vale:
 en una cantidad: Rg = R+D R. El cambio que necesitamos medir es la fracción de cambio en la resistencia de la galga desde el valor en la que la galga no está estresada a cuando lo está: - D R/R. Suponiendo R1=R2=R3=R, la relación entre VOUT y VIN vale:")
47
VOUT/ VIN = ( 1/2 - 1/(2+D R/R) ) » (D R/R)/4
De manera que el cambio fraccional es linealmente proporcional a la fracción del voltage de salida y de entrada. En un circuito de puente verdaderamente la relación entre la tensión de salida y la deformación no es lineal, pero para esfuerzos de hasta algunos cientos o miles de micro-deformaciones el error es normalmente tan pequeño que se puede despreciar. Para grandes deformaciones se deben hacer correcciones (habitualmente por software) que se deben aplicar para compensar la no linealidad.
 que se deben aplicar para compensar la no linealidad.")
48
Magnetorresistencias
Si se aplica un campo magnético, B, a un conductor por el que circula una corriente, dependiendo de la dirección del campo, además de la tensión de Hall hay una reducción de la corriente al ser desviados algunos portadores de su trayectoria. Ello significa una disminución de su conductividad y por tanto un aumento de su resistencia eléctrica. Se conoce como efecto magnetorresistivo. En materiales ferromagnéticos, Permalloy (Fe 20%, Ni 80%) y aleaciones NiFeCo y NiFeMo, este efecto es bien acusado. Las aplicaciones se pueden dividir en dos grupos: Medidas directas de campos magnéticos. Otras magnitudes a través de variaciones de B. Ejemplos: desplazamientos, detectores de proximidad, etc. En estos casos el elemento móvil debe provocar un campo B. Para ello debe ser metálico, en presencia de de un B constante.
 y aleaciones NiFeCo y NiFeMo, este efecto es bien acusado. Las aplicaciones se pueden dividir en dos grupos: Medidas directas de campos magnéticos. Otras magnitudes a través de variaciones de B. Ejemplos: desplazamientos, detectores de proximidad, etc. En estos casos el elemento móvil debe provocar un campo B. Para ello debe ser metálico, en presencia de de un B constante.")
49
Tecnología GMR Quizás una de las aplicaciones mas interesantes encontradas en los últimos del efecto magnetorresistivo haya sido el de la tecnología GMR (Giant Magneto Resistance) o efecto magnetorresistivo gigante. Este efecto, que es magnetorresistivo, es enormemente amplificado en láminas delgadas, del orden de los nanómetros, de ciertos materiales ferromagnéticos. Con GMR se fabrican discos duros con platos de 3,5 pulgadas de diámetro y 100 GB de información por plato. Como fabricar una unidad de disco duro con cuatro platos y ocho cabezales de lectura no presenta problemas se consiguen discos duros de 400 GB de capacidad.
 o efecto magnetorresistivo gigante. Este efecto, que es magnetorresistivo, es enormemente amplificado en láminas delgadas, del orden de los nanómetros, de ciertos materiales ferromagnéticos. Con GMR se fabrican discos duros con platos de 3,5 pulgadas de diámetro y 100 GB de información por plato. Como fabricar una unidad de disco duro con cuatro platos y ocho cabezales de lectura no presenta problemas se consiguen discos duros de 400 GB de capacidad.")
Presentaciones similares