Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tema 6.- Simetría Interna: Grupos Espaciales
* Redes espaciales adoptan la simetría de la clase holosimétrica * Dentro de cada sistema es posible encontrar cristales que pertenecen a clases de menor simetría simetría que posee el motivo que se repite periodicamente (según las traslaciones) sobre cada punto de la red. *Si la simetría puntual del motivo es igual o mayor que la de la red, el arreglo o la estructura resultante mantendrá la simetría de la red, siempre que la orientación de los elementos de simetría en el motivo y en la red coinciden * Si la simetría del motivo que se repite corresponde a un subgrupo de la del retículo, la simetría de la estructura resultante se reducirá de forma que sea igual a la de dicho motivo
 sobre cada punto de la red. *Si la simetría puntual del motivo es igual o mayor que la de la red, el arreglo o la estructura resultante mantendrá la simetría de la red, siempre que la orientación de los elementos de simetría en el motivo y en la red coinciden. * Si la simetría del motivo que se repite corresponde a un subgrupo de la del retículo, la simetría de la estructura resultante se reducirá de forma que sea igual a la de dicho motivo.")
2
Si consideramos una red rectangular plana y la combinamos con un motivo que corresponda al grupo puntual plano 2mm (igual simetría), obtenemos un arreglo bidimensional en el que la simetría puede representarse como p2mm
, obtenemos un arreglo bidimensional en el que la simetría puede representarse como p2mm")
3
Si combinamos este mismo motivo con una red oblicua, al ser menor la simetría de la red que la del motivo, la simetría del arreglo resultante será p2

4
Situamos un motivo que corresponde al grupo puntual 2 y lo combinamos con la red rectangular plana. El resultado será un arreglo cuya simetría se reduce por tener el motivo menor simetría que la red p2

5
Si tomamos un motivo con simetría 2mm y lo combinamos con una red cuadrada que tiene mayor simetría, la simetría de la red cuadrada se reduce y tenemos un grupo P2mm

6
Combinación de grupos puntuales planos y redes planas: los 17 grupos espaciales planos
* Existe una serie de compatibilidades entre los 10 grupos puntuales planos y los tipos de redes planas: - Los ejes de orden 3 y de orden 6 solo son compatibles con la red hexagonal - Los ejes cuaternarios con la red cuadrada - Los ejes binarios son compatibles con todas las redes - Los planos de simetría no son compatibles con la red oblícua *Así, podemos obtener una serie de combinaciones que nos permiten definir tanto la simetría de los modelos bidimensionales como su forma de disponerse en el medio periódico

7
* Si combinamos grupos puntuales planos y redes planas obtenemos 13 grupos espaciales planos:p1, p2, pm, cm, p2mm, c2mm, p4, p4mm, p3, p3m1, p31m, p6, p6mm

8
PLANOS DE DESLIZAMIENTO
* Resultan de combinar reflexión + traslación * Están presentes en modelos 3D y 2D * El plano de deslizamiento (g) realiza simultaneamente dos operaciones: refleja el motivo y lo traslada a intervales de ½ de t
 realiza simultaneamente dos operaciones: refleja el motivo y lo traslada a intervales de ½ de t.")
9
En algunos casos, los planos de deslizamiento están incluidos en la simetría de la red como en la rectangular centrada c2mm

10
La red cuadrada p4mm también los lleva implicitos

11
Podemos obtener hasta cuatro nuevos grupos espaciales planos si sustituimos planos de simetría por planos de deslizamiento de tipo (g). Se generan así los grupos: pg, p2mg, p2gg y p4mg

12
* Algunas combinaciones de elementos eran equivalentes a otras (-6=3/m, por ejemplo), también hay algunos grupos equivalentes. Así, no hemos representado el grupo cg, porque el resultado final es equivalente al que se genera con cm * p3m1 y p31m poseen el mismo contenido total de simtría y forma pero la diferencia estriba en la disposición de los tres planos de simetría asociados a la rotación del eje ternario

13
Grupos espaciales tridimensionales
* Surgen de combinar los 32 grupos puntuales de simetría con los 14 tipos de redes espaciales GRUPOS ESPACIALES SIMPLES * La simetría inherente contenida en un arreglo tridimensional constituye lo que llamamos Grupo Espacial * La simetría del grupo espacial se define: - Con el tipo de red espacial, que describe el esquema de repetición de la estructura - La simetría del motivo que se ordena (grupo puntual)
")
14
Si cada red dentro de cada sistema repite un motivo cuya simetría pertenece a alguno de los grupos puntuales de dicho sistema, obtenemos los 73 grupos puntuales simples

15
Algunos grupos tienen una notación similar pero tienen diferencias
* Cmm2 y Amm2 se diferencian en la orientación del binario presente en el motivo que se repite * Los grupos p42m y p4m2 se diferencian en que en p42m los ejes binarios del motivo coinciden con las traslaciones “a”, mientras que en p4m2 se encuentran a 45º de dichas traslaciones * En los grupos p3m1 y p31m, el p31m los planos de simetría coinciden con las traslaciones a, mientras que en p3m1 son perpendiculares a dichas traslaciones

16
Un grupo de átomos o iones que presentan una simetría puntual determinada (motivo) dentro de un sistema cristalino pueden disponerse según un esquema de repetición (red espacial) cuya simetría sea característica de otro sistema.
 dentro de un sistema cristalino pueden disponerse según un esquema de repetición (red espacial) cuya simetría sea característica de otro sistema.")
17
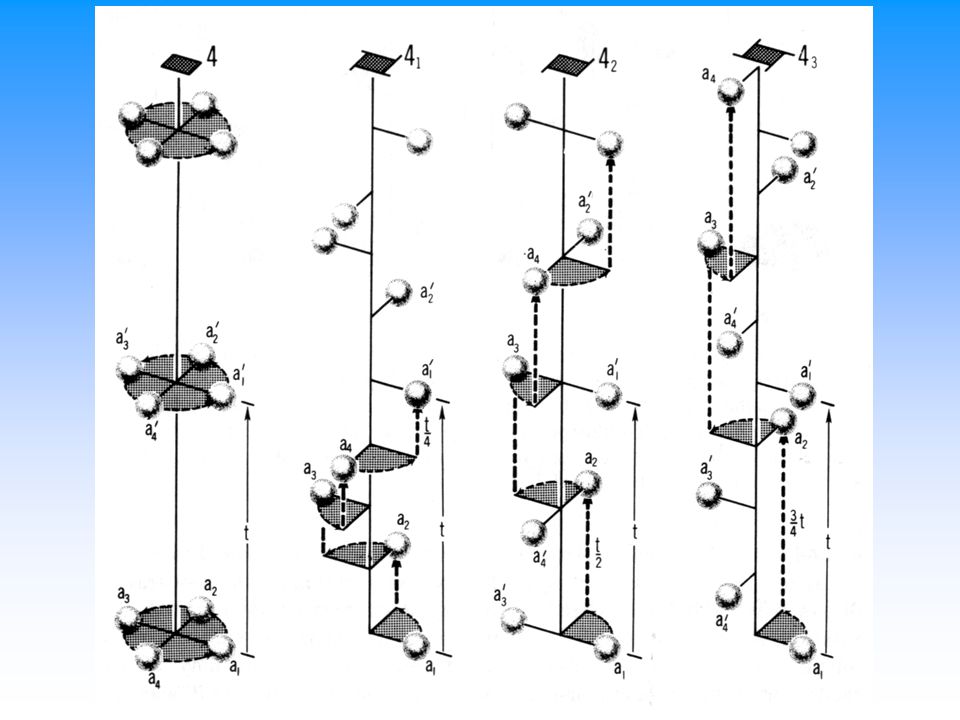
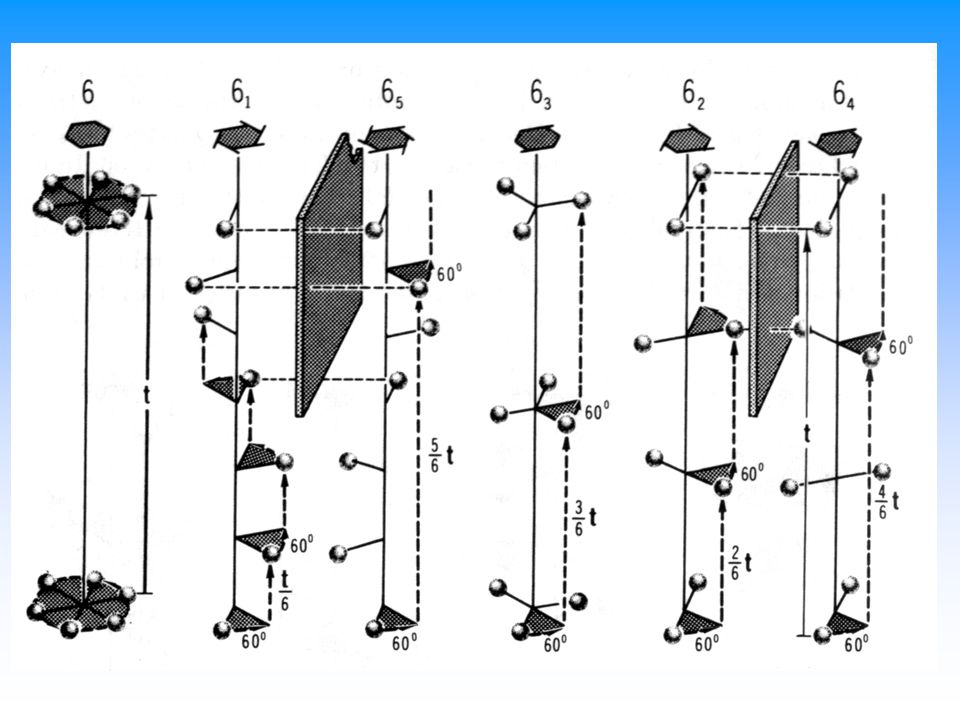
EJES HELICOIDALES * Operación que combina una rotación de 180, 120, 90 o 60º, con una traslación paralela a dicho eje * En todos los ejes helicoidales, el subindice indica la fracción de la traslación t que corresponde a cada operación de dicho eje. Por ello, en el binario es 21, pues desplaza ½t.

20
PLANOS DE DESLIZAMIENTO
Planos axiales: la componente de deslizamiento en estos planos es paralela a la dirección de alguno de los ejes cristalográficos. La magnitud del deslizamiento equivale a ½ de la traslación unidad a lo largo de dicho eje. A estos planos les llamamos planos a, b ó c, según la dirección del eje que consideremos.

21
* Planos diagonales: se representan generalmente como “n”, y son planos cuya componente de deslizamiento es un vector suma de dos de alguno de estos tres: a/2, b/2 ó c/2

22
Planos tipo diamante o planos “d”: la componente de deslizamiento está representada por un vector suma de dos de entre los siguientes: a/4, b/4 ó c/4 Mediante la sustitución de planos m por planos de deslizamiento y ejes normales por ejes helicoidales añadimos 157 nuevas combinaciones que junto con las 73 anteriores hacen 230

23
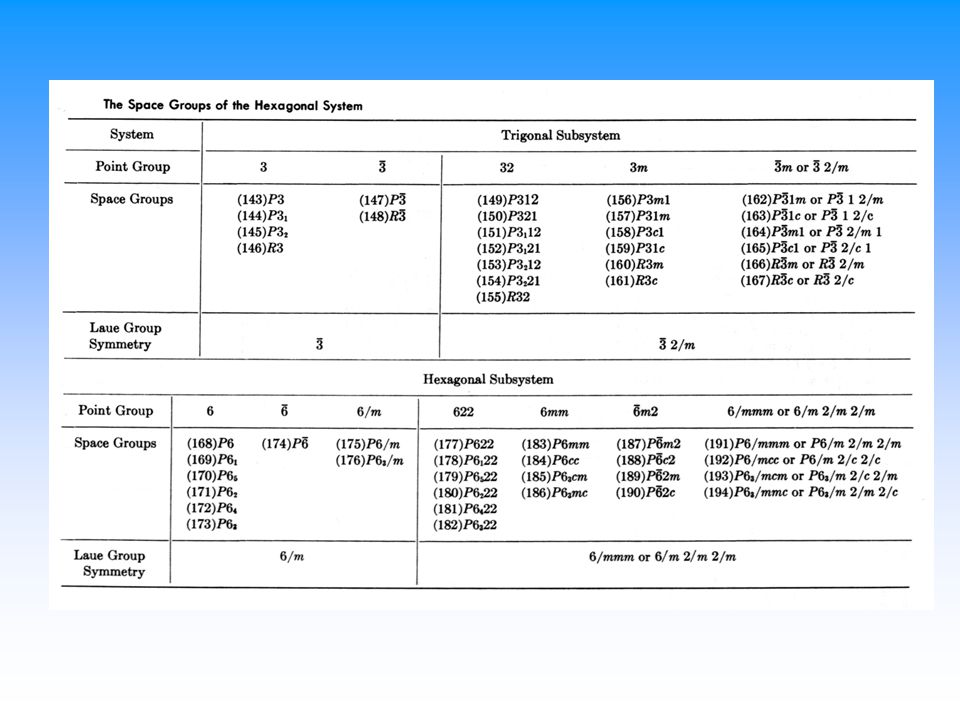
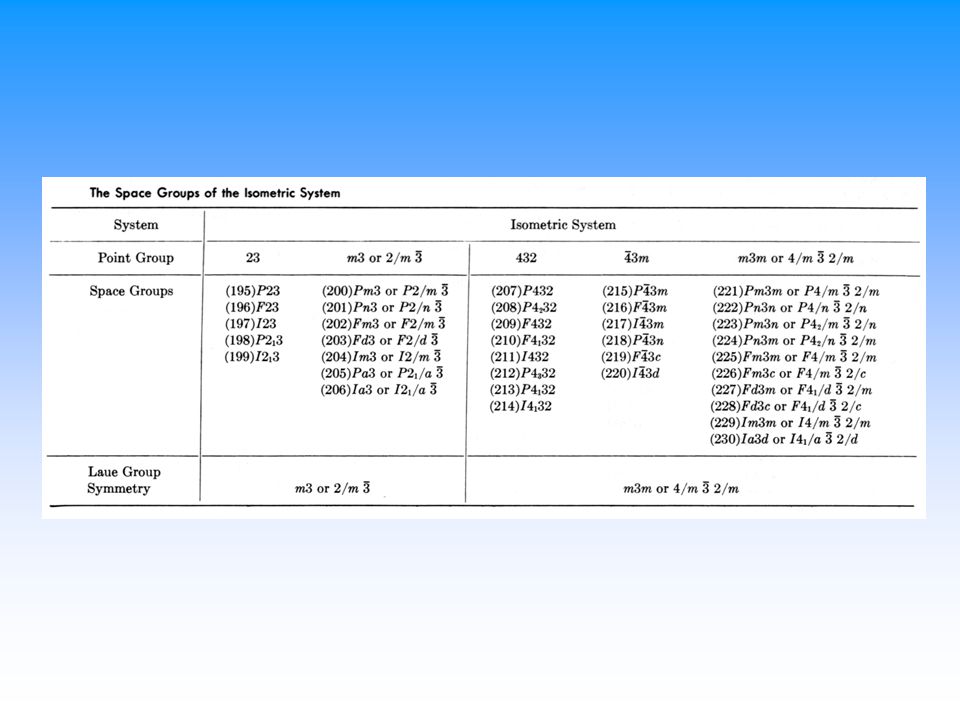
LOS 230 GRUPOS ESPACIALES * Si consideramos, además de los elementos de simetría externa, todos los nuevos elementos que surgen al aplicar la traslación, y los combinamos con los 14 tipos de redes tridimensionales obtenemos los 230 Grupos Espaciales * El grupo espacial indica, en primer lugar, el tipo de red espacial, y a continuación la relación entre los ejes cristalográficos y los distintos elementos de simetría

28
PROYECCIONES * La representación gráfica de los distintos grupos, se tiende a representar los elementos de simetría en una celda unidad * Los modelos 3D resultan poco clarificadores

29
* Se suele representar la proyección de los distintos elementos de la estructura sobre el plano (001) (plano perpendicular al eje c ) * La representación de los distintos elementos sobre este plano se realiza de acuerdo con unos símbolos

30
POSICIONES EQUIVALENTES
* Cualquier posición en una celda unidad junto con todas las posiciones relacionadas por simetría con ésta mediante los distintos elementos de simetría constituye lo que se llama un conjunto de posiciones equivalentes

31
* El número de posiciones equivalentes en una celda unidad depende de :
- La naturaleza y el número de elementos presentes en el grupo espacial - La localización del punto de partida respecto a dichos elementos * Posiciones especiales cuando el punto de partida está sobre un eje de rotación o un plano de simetría * Posiciones generales cuando partimos de un punto de coordenadas x,y,z fracciones al azar de las traslaciones unidad *El número de posiciones equivalentes que obtenemos partiendo de una posición general será mayor que si partimos de una posición especial

32
Estos datos vienen representados en las Tablas Internacionales par Cristalografía de Rayos X

Presentaciones similares








 a una magnitud vectorial, obtenida como producto.>")












