Descargar la presentación
La descarga está en progreso. Por favor, espere

1
3. Introducción a la Lógica Difusa
Jorge Cabrera Gámez Departamento de Informática y Sistemas Universidad de Las Palmas de Gran Canaria © Todos los derechos reservados 1

2
Contenidos 3. Introducción a la Lógica Difusa
3.1 Teoría de conjuntos difusos 3.2 Inferencia en lógica difusa 3.3 Un caso de estudio 3.4 Bibliografía básica: [Cox-94], [Bend-96]. 2

3
Modelos difusos de representación y tratamiento de la incertidumbre
Introducción a la Lógica Borrosa Teoría de conjuntos difusos / borrosos (Fuzzy set theory) L. Zadeh, 1965 Modelos difusos de representación y tratamiento de la incertidumbre Definición. Conjunto: La reunión de todos los elementos que verifican una condición “El conjunto de todos los elementos de Y que verifican A(x)” 3
 L. Zadeh, Modelos difusos de representación y tratamiento de la incertidumbre. Definición. Conjunto: La reunión de todos los elementos que verifican una condición. El conjunto de todos los elementos de Y que verifican A(x) 3.")
4
Introducción a la Lógica Borrosa
Definición. Conjunto: La reunión de todos los elementos que verifican una condición “El conjunto de todos los elementos de Y que verifican A(x)” Teoría de conjuntos difusos (Fuzzy set theory) Teoría clásica de conjuntos (Crisp set theory) “No pertenece” pertenencia de x al conjunto A “Sí pertenece” Existe un rango de grados de pertenencia entre las posibilidades extremas 4
 Teoría de conjuntos difusos (Fuzzy set theory) Teoría clásica de conjuntos (Crisp set theory) No pertenece pertenencia de x al conjunto A. Sí pertenece Existe un rango de grados de pertenencia entre las posibilidades extremas. 4.")
5
Introducción a la Lógica Borrosa
Idea Un conjunto difuso es un conjunto cuya fronteras no están bien definidas (subjetividad, vaguedad, imprecisión, ...) y, por tanto, la pertenencia o no de un elemento al mismo contiene una cierta incertidumbre Bayes Conjuntos Difusos Aleatoriedad de eventos definidos de manera precisa Subjetividad en la calificación de eventos no aleatorios 5
 y, por tanto, la pertenencia o no de un elemento al mismo contiene una cierta incertidumbre. Bayes. Conjuntos Difusos. Aleatoriedad de eventos definidos de manera precisa. Subjetividad en la calificación de eventos no aleatorios. 5.")
6
Ejemplo: Sea el conjunto de las personas consideradas “altas” definido sobre el conjunto de la población española, y consideremos un elemento del mismo denominado “pepe”. La cuestión de si pepe pertenece o no al conjunto de las personas “altas” puede resolverse atendiendo a la medida altura(pepe) y una función que mide la posibilidad de ser considerado alto en base a la altura. 1.0 0.5 0.0 alto(altura) 1.5 2.0 altura (m) 6
 y una función que mide la posibilidad de ser considerado alto en base a la altura alto(altura) altura (m) 6.")
7
Definición de la Función de posibilidad (Función de pertenencia)
1. Como una función de cualquier conjunto de parámetros pk(x) del elemento x. 2. Por enumeración de pares definidos sobre elementos discretos del conjunto donde no representa una suma, sino una agregación de pares. a(x)/x no representa ningún cociente, sino un par (posibilidad/elemento) Ejemplo: Sea el ejemplo anterior donde se definía el conjunto de personas “altas”. Si el conjunto de posibles alturas se representa por un conjunto de alturas discretas, U, tal que, U= { 1.30, 1.50, 1.70, 1.90, 2.10 } podemos definir la distribución de posibilidad de “ser alto” sobre el conjunto U como: ALTO = 0.0/ / / / /2.10 7
 del elemento x. 2. Por enumeración de pares definidos sobre elementos discretos del conjunto. donde. no representa una suma, sino una agregación de pares. a(x)/x no representa ningún cociente, sino un par (posibilidad/elemento) Ejemplo: Sea el ejemplo anterior donde se definía el conjunto de personas altas . Si el conjunto de posibles alturas se representa por un conjunto de alturas discretas, U, tal que, U= { 1.30, 1.50, 1.70, 1.90, 2.10 } podemos definir la distribución de posibilidad de ser alto sobre el conjunto U como: ALTO = 0.0/ / / / /")
8
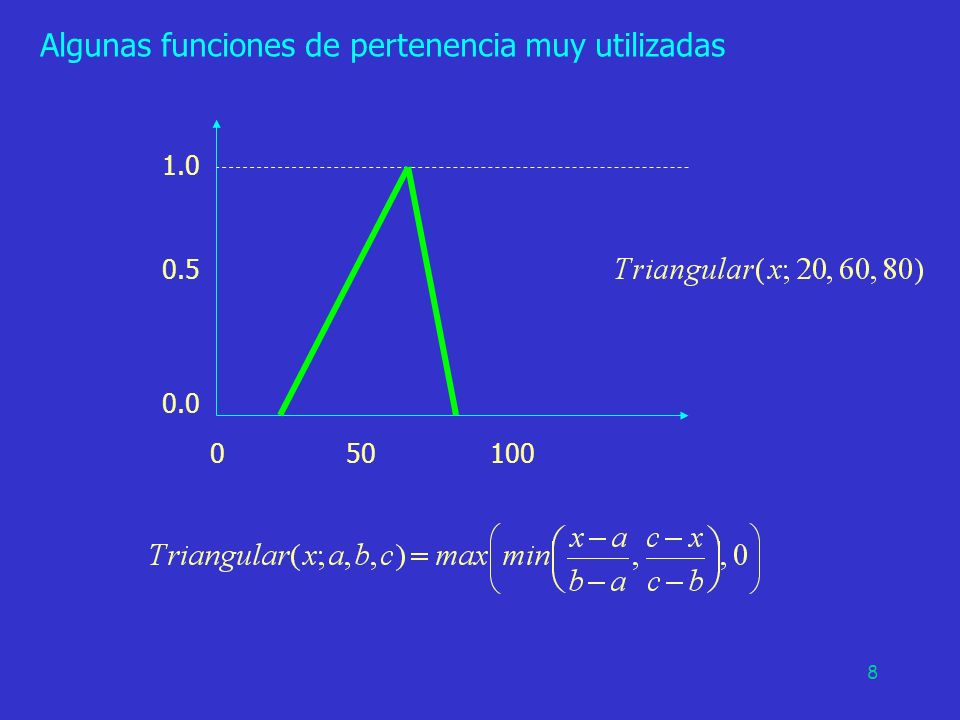
Algunas funciones de pertenencia muy utilizadas
1.0 0.5 0.0 50 100 8
9
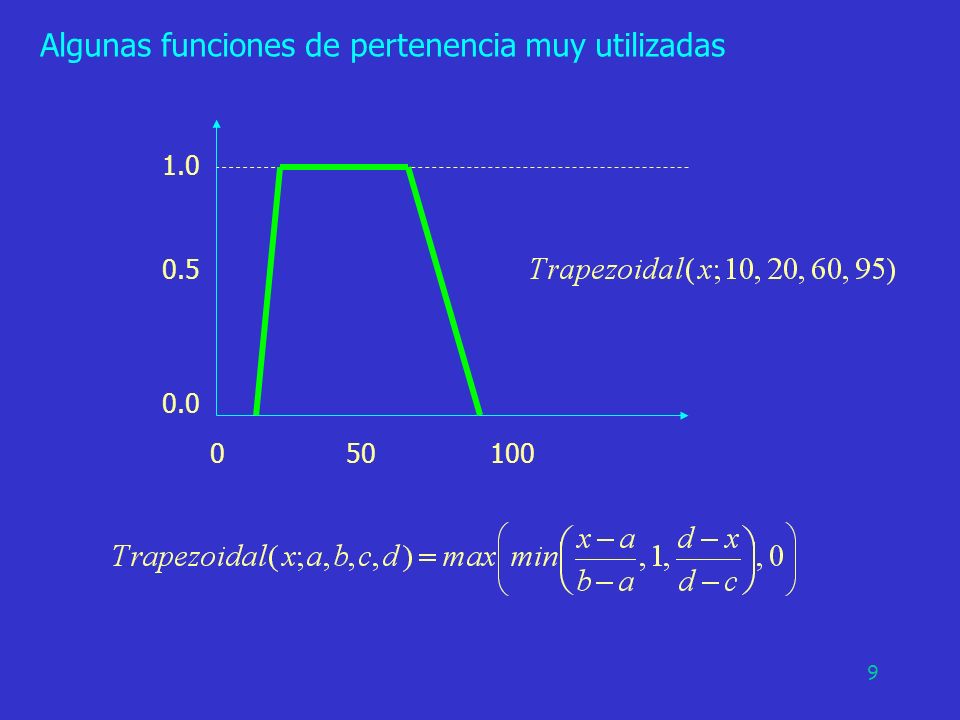
Algunas funciones de pertenencia muy utilizadas
1.0 0.5 0.0 50 100 9
10
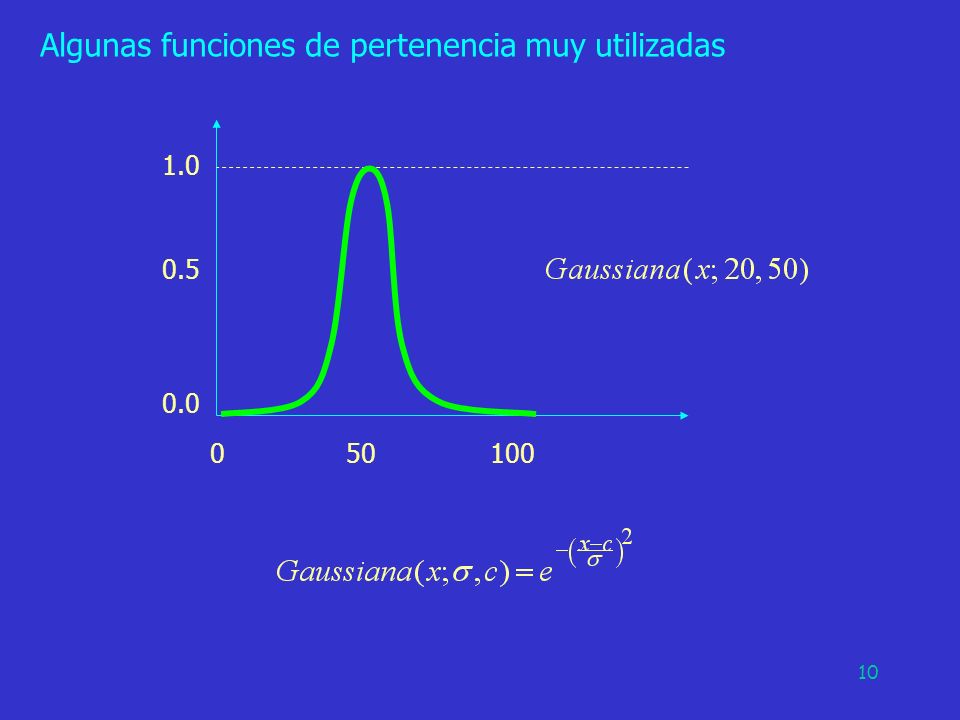
Algunas funciones de pertenencia muy utilizadas
1.0 0.5 0.0 50 100 10
11
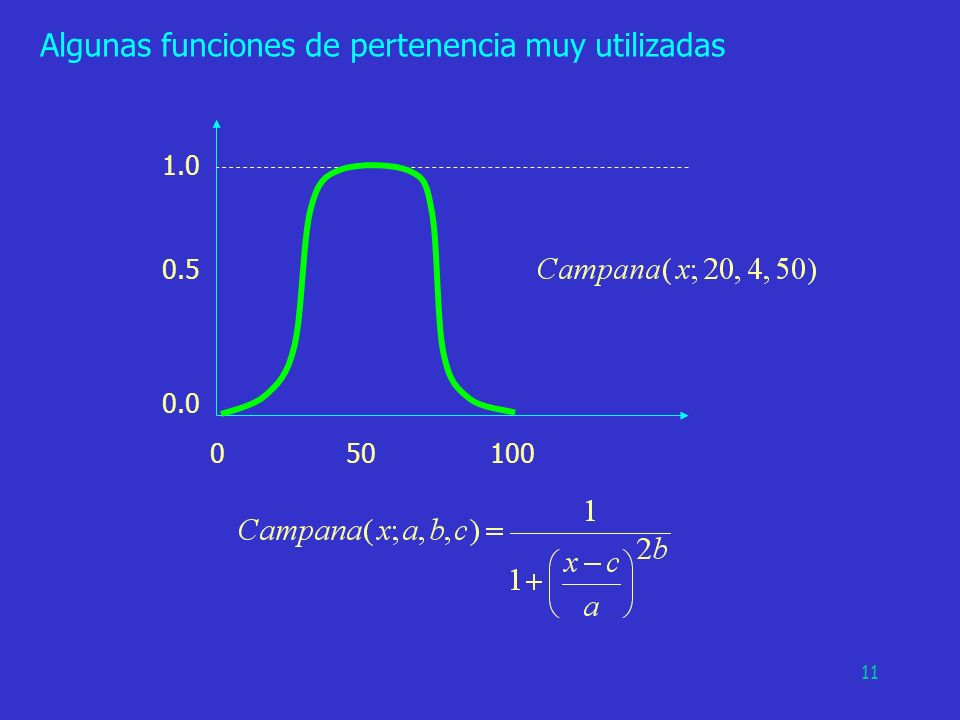
Algunas funciones de pertenencia muy utilizadas
1.0 0.5 0.0 50 100 11
12
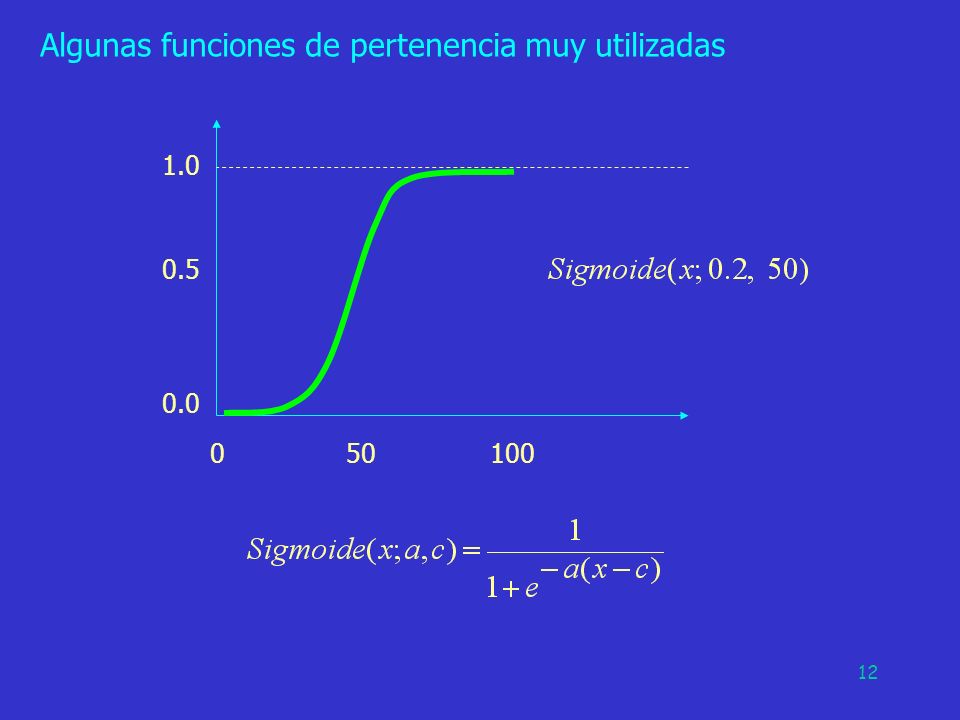
Algunas funciones de pertenencia muy utilizadas
1.0 0.5 0.0 50 100 12
13
Modificadores (Hedges)
Es posible introducir conjuntos difusos por transformación lingüística de uno dado. Algunos de los más frecuentes son: muy A más_o_menos A no A En general, pueden introducirse nuevas clases de cualificadores o modificadores en la forma: 13

14
Extensión cilíndrica En el caso de que se quiera realizar la composición de dos conjuntos cuyas bases de parámetros sean diferentes, será necesario definir una base de parámetros comunes. A este proceso se le denomina Extensión Cilíndrica. Sea una distribución posibilista del conjunto A sobre el parámetro definido por U1, dada por: U1 = { 1, 2, 5 } Y sea otra distribución posibilista del conjunto B sobre el parámetro definido por U2, tal que: U2 = { 8, 10, 15 } 14

15
Extensión cilíndrica Se define la extensión cilíndrica de A sobre el producto cartesiano de los parámetros U1 y U2, dado por U3 = U1xU2 como: U2 1 (1,8) (1,10) (1,15) U1 2 (2,8) (2,10) (2,15) 5 (5,8) (5,10) (5,15) 15
 (1,10) (1,15) U1 2 (2,8) (2,10) (2,15) 5 (5,8) (5,10) (5,15) 15.")
16
Proyección Es el proceso inverso al de Extensión cilíndrica. De él se obtiene una distribución posibilista sobre un conjunto de parámetros inferior de acuerdo con: donde sup es el valor supremo sobre el parámetro xn. Ejemplo: Sea la distribución posibilista A(x,y) dada por: A = 1.0/(1, 3) + 0.9/(1, 6) + 0.8/(1, 9) 0.7/(5, 3) + 0.6/(5, 6) + 0.5/(5, 9) 0.4/(8, 3) + 0.3/(8, 6) + 0.2/(8, 9) tiene una proyección sobre Y, A´(x), dada por: A´= 1.0/ / /8 16
 dada por: A = 1.0/(1, 3) + 0.9/(1, 6) + 0.8/(1, 9) 0.7/(5, 3) + 0.6/(5, 6) + 0.5/(5, 9) 0.4/(8, 3) + 0.3/(8, 6) + 0.2/(8, 9) tiene una proyección sobre Y, A´(x), dada por: A´= 1.0/ / /")
17
Reglas de Composición Dados los conjuntos A y B, cuyas distribuciones de posibilidad son conocidas se define la distribución de posibilidad de una composición de ambas como: A*B(x) = F*(A(x), B(x)) Unión: AB(x) = F(A(x), B(x)) Intersección: AB(x) = F(A(x), B(x)) Complemento: ¬A(x) = F ¬(A(x)) F(A(x), B(x)) S-norma F(A(x), B(x)) T-norma Normalmente las funciones AB(x), AB(x) y ¬A(x) serán dependientes de la semántica del conjunto. Sin embargo, se pueden simplificar tales funciones suponiendo que dependen solamente de las distribuciones de los conjuntos A y B por separado. 17
 = F*(A(x), B(x)) Unión: AB(x) = F(A(x), B(x)) Intersección: AB(x) = F(A(x), B(x)) Complemento: ¬A(x) = F ¬(A(x)) F(A(x), B(x)) S-norma. F(A(x), B(x)) T-norma. Normalmente las funciones AB(x), AB(x) y ¬A(x) serán dependientes de la semántica del conjunto. Sin embargo, se pueden simplificar tales funciones suponiendo que dependen solamente de las distribuciones de los conjuntos A y B por separado. 17.")
18
Simplificación 1: Comportamiento monótono
Por ejemplo: coches_veloces coches Dado que se verifica: A A B B A B A B A A B B entonces por la simplificación anterior deben verificarse también: A(x) AB(x) B(x) AB(x) AB(x) A(x) AB(x) B(x) Esto implica que deben cumplirse las siguienes restricciones sobre las operaciones de unión e intersección AB(x) max(A(x), B(x)) A B(x) min(A(x), B(x)) 18
 AB(x) B(x) AB(x) AB(x) A(x) AB(x) B(x) Esto implica que deben cumplirse. las siguienes restricciones sobre las operaciones de unión e intersección. AB(x) max(A(x), B(x)) A B(x) min(A(x), B(x)) 18.")
19
Simplificación 2: Definición del complementario
Para definir la distribución del conjunto complementario se asume la siguiente simplificación: Lo que equivale a: 19

20
AB(x) max(A(x), B(x)) AB(x) = max(A(x), B(x))
Operadores de Zadeh: Zadeh estableció como definición de las leyes de pertenencia a los conjuntos intersección y unión las cotas máximas y mínimas respectivamente de dichos conjuntos: AB(x) max(A(x), B(x)) AB(x) = max(A(x), B(x)) AB(x) = min(A(x), B(x)) AB(x) min(A(x), B(x)) ¬A(x) = 1 - A(x) Estas definiciones no están exentas de paradojas, por ejemplo: A¬A(x) = max(A(x), 1 - A(x)) 1 A¬A(x) = min(A(x), 1 - A(x)) 0 Un elemento puede pertenecer a un conjunto y su complementario Un elemento puede no pertenecer “del todo” a un conjunto y su complementario 20
 max(A(x), B(x)) AB(x) = max(A(x), B(x)) AB(x) = min(A(x), B(x)) AB(x) min(A(x), B(x)) ¬A(x) = 1 - A(x) Estas definiciones no están exentas de paradojas, por ejemplo: A¬A(x) = max(A(x), 1 - A(x)) 1. A¬A(x) = min(A(x), 1 - A(x)) 0. Un elemento puede pertenecer a un conjunto y su complementario. Un elemento puede no pertenecer del todo a un conjunto y su complementario. 20.")
21
Intersecciones difusas Rango
Uniones difusas Intersecciones difusas Rango 21

22
Se construye a partir de la teoría de conjuntos difusos
Lógica Difusa Se construye a partir de la teoría de conjuntos difusos El grado de verdad o certeza de una proposición p es un valor en el contínuo [0,1] proposición p: X es A p(x) = A(x) Para completar el cálculo de proposiciones se definen los conectores AND, OR y NOT p q : (X es A) (Y es B) p q : (X es A) (Y es B) p: (X es A) 22
 = A(x) Para completar el cálculo de proposiciones se definen los conectores AND, OR y NOT. p q : (X es A) (Y es B) p q : (X es A) (Y es B) p: (X es A) 22.")
23
Por otro lado debe recordarse que :
Lógica Difusa Para completar el cálculo de proposiciones se definen los conectores AND, OR y NOT p q : (X es A) (Y es B) p q : (X es A) (Y es B) p: (X es A) Puede ocurrir que las distribuciones posibilistas p y q no estén definidas sobre la misma base de parámetros. En ese caso es necesario extender cilíndricamente dichas distribuciones. Por otro lado debe recordarse que : pq(x) max(p(x), q(x)) pq(x) min(p(x), q(x)) 23
 (Y es B) p q : (X es A) (Y es B) p: (X es A) Puede ocurrir que las distribuciones posibilistas p y q no estén definidas sobre la misma base de parámetros. En ese caso es necesario extender cilíndricamente dichas distribuciones. Por otro lado debe recordarse que : pq(x) max(p(x), q(x)) pq(x) min(p(x), q(x)) 23.")
24
En general, definiremos las funciones and(), or() y not() como:
Lógica Difusa En general, definiremos las funciones and(), or() y not() como: pq(x) = or(p(x), q(x)) pq(x) = and(p(x), q(x)) ¬p(x) = not(p(x)) En el caso más general: pq(x,y) = or(p(x), q(y)) pq(x,y) = and(p(x), q(y)) Las funciones and(), or() y not() son dependientes de la semántica de las proposiciones o Universo del Discurso. Deben verificar en cualquier caso las siguientes relaciones para ser compatibles con los valores booleanos en el límite de no borrosidad: 24
, or() y not() como: pq(x) = or(p(x), q(x)) pq(x) = and(p(x), q(x)) ¬p(x) = not(p(x)) En el caso más general: pq(x,y) = or(p(x), q(y)) pq(x,y) = and(p(x), q(y)) Las funciones and(), or() y not() son dependientes de la semántica de las proposiciones o Universo del Discurso. Deben verificar en cualquier caso las siguientes relaciones para ser compatibles con los valores booleanos en el límite de no borrosidad: 24.")
25
Un conjunto muy amplio de funciones cumplen estas restricciones.
Lógica Difusa Las funciones and(), or() y not() son dependientes de la semántica de las proposiciones o Universo del Discurso. Deben verificar en cualquier caso las siguientes relaciones para ser compatibles con los valores booleanos en el límite de no borrosidad: or(1, u) = 1 or(0, u) = u and(1, u) = u and(0, u) = 0 not(1) = 0 not(0) = 1 Un conjunto muy amplio de funciones cumplen estas restricciones. Dos modelos muy empleados son los siguientes Modelo de Zadeh: or1(u, v) = max(u, v) and1(u, v) = min(u, v) not(u) = 1 - u Modelo Pseudoprobabilístico: or2(u, v) = u + v - u·v and2(u, v) = u·v not(u) = 1 - u 25
, or() y not() son dependientes de la semántica de las proposiciones o Universo del Discurso. Deben verificar en cualquier caso las siguientes relaciones para ser compatibles con los valores booleanos en el límite de no borrosidad: or(1, u) = 1. or(0, u) = u. and(1, u) = u. and(0, u) = 0. not(1) = 0. not(0) = 1. Un conjunto muy amplio de funciones cumplen estas restricciones. Dos modelos muy empleados son los siguientes. Modelo de Zadeh: or1(u, v) = max(u, v) and1(u, v) = min(u, v) not(u) = 1 - u. Modelo Pseudoprobabilístico: or2(u, v) = u + v - u·v. and2(u, v) = u·v. not(u) = 1 - u. 25.")
26
E) p (q r) (p q) (p r) F) p (q r) (p q) (p r)
or1(u, v) = max(u, v) and1(u, v) = min(u, v) not(u) = 1 - u Lógica Booleana Modelo de Zadeh A) p p 1 B) p p 0 C) p (q r) (p q) r D) p (q r) (p q) r E) p (q r) (p q) (p r) F) p (q r) (p q) (p r) G) (p q) p q H) (p q) p q A) max(u, 1- u) 1 B) min(u, 1 - u) 0 C) D) E) F) G) H) 26
 = max(u, v) and1(u, v) = min(u, v) not(u) = 1 - u. Lógica Booleana. Modelo de Zadeh. A) p p 1. B) p p 0. C) p (q r) (p q) r. D) p (q r) (p q) r. E) p (q r) (p q) (p r) F) p (q r) (p q) (p r) G) (p q) p q. H) (p q) p q. A) max(u, 1- u) 1. B) min(u, 1 - u) 0. C) D) E) F) G) H) 26.")
27
Modelo Pseudoprobabilístico
or2(u, v) = u + v -u·v and2(u, v) = u·v not(u) = 1 - u Lógica Booleana Modelo Pseudoprobabilístico A) p p 1 B) p p 0 C) p (q r) (p q) r D) p (q r) (p q) r E) p (q r) (p q) (p r) F) p (q r) (p q) (p r) G) (p q) p q H) (p q) p q A) u + (1- u) - u·(1-u) 1 B) u·(1 - u) 0 C) D) E) F) G) H) 27
 = u + v -u·v. and2(u, v) = u·v. not(u) = 1 - u. Lógica Booleana. Modelo Pseudoprobabilístico. A) p p 1. B) p p 0. C) p (q r) (p q) r. D) p (q r) (p q) r. E) p (q r) (p q) (p r) F) p (q r) (p q) (p r) G) (p q) p q. H) (p q) p q. A) u + (1- u) - u·(1-u) 1. B) u·(1 - u) 0. C) D) E) F) G) H) 27.")
28
Demostración de la primera ley de Morgan
p q=max(p,q) (p q)=1-max(p,q) p q = min(1-p,1-q) p q p p p p < q q q q p q (p q) p q p+ q - p·q p - q + p·q (1 - p)(1 - q) = 1 - p - q + p·q (p q) p q 28
 (p q)=1-max(p,q) p q = min(1-p,1-q) p q p 1 - p 1 - p. p < q q 1 - q 1 - q. p q. (p q) p q. p+ q - p·q 1 - p - q + p·q (1 - p)(1 - q) = 1 - p - q + p·q. (p q) p q. 28.")
29
La operación de implicación se puede expresar en la forma:
Inferencia Difusa La operación de implicación se puede expresar en la forma: p q : si (X es A) entonces (Y es B) donde A y B son variables lingüísticas definidas como conjuntos difusos sobre los universos de discurso de X e Y respectivamente. Ejemplos: Si la presión es baja entonces el volumen es grande Si el tomate es rojo entonces está maduro Si la velocidad es alta entonces frenar ligeramente 29
 entonces (Y es B) donde A y B son variables lingüísticas definidas como conjuntos difusos sobre los universos de discurso de X e Y respectivamente. Ejemplos: Si la presión es baja entonces el volumen es grande. Si el tomate es rojo entonces está maduro. Si la velocidad es alta entonces frenar ligeramente. 29.")
30
Inferencia Difusa El principal problema para establecer un valor de certeza a este operador estriba en definir una interpretación del mismo. Sea imp() una función que proporciona la certeza en una fórmula con implicación. Veamos posibles interpretaciones: 30
 una función que proporciona la certeza en una fórmula con implicación. Veamos posibles interpretaciones: 30.")
31
A) Basada en la equivalencia siguiente, válida en el límite booleano
p q ¬ p q p q p q ¬ p ¬p q ¬ q p ¬q ¬(p ¬q) T T T F T F F T T F F F F T T F F T T T T F F T F F T T T T F T De acuerdo con esta interpretación y según los operadores ya definidos: imp1(u, v) = max(1 - u, v) imp2(u, v) = (1 - u) + v - (1 - u)·v 31
 T T T F T F F T. T F F F F T T F. F T T T T F F T. F F T T T T F T. De acuerdo con esta interpretación y según los operadores ya definidos: imp1(u, v) = max(1 - u, v) imp2(u, v) = (1 - u) + v - (1 - u)·v. 31.")
32
p (p q) q (modus ponens)
B) Basada en la idea: “La certeza del consecuente es superior o igual a la conjunción del antecedente e implicación” p (p q) q (modus ponens) B1) min(u, imp(u, v)) v B2) u * imp(u, v)) v C) Implicación de Lukasiewicz imp5(u, v) = min(1 - u + v, 1) 32
 Basada en la idea: La certeza del consecuente es superior o igual a la conjunción del antecedente e implicación p (p q) q (modus ponens) B1) min(u, imp(u, v)) v. B2) u * imp(u, v)) v. C) Implicación de Lukasiewicz. imp5(u, v) = min(1 - u + v, 1) 32.")
33
d) u v mod(u, w) mod(v, w) d) La función mod() debe ser
Modus Ponens Empleando alguna de las definiciones anteriores de implicación es posible definir el proceso de inferencia difusa empleando “modus ponens”. p (p q) q Dadas las certezas de un antecedente y la de la implicación, la determinación de la certeza del consecuente se realiza en base a una función generadora del modus ponens que denominaremos mod() La función mod() debe verificar una serie de propiedades, algunas de las cuales son las siguientes: a) mod(u, imp(u, v)) v b) mod(1, 1) = 1 c) mod(0, u) = v d) u v mod(u, w) mod(v, w) d) La función mod() debe ser monótona creciente con la certeza del antecedente c) De un antecedente completamente falso puede concluirse cualquier cosa a) La función mod() tiene como cota superior la certeza del consecuente b) Este es el límite booleano del modus ponens 33
 q. Dadas las certezas de un antecedente y la de la implicación, la determinación de la certeza del consecuente se realiza en base a una función generadora del modus ponens que denominaremos mod() La función mod() debe verificar una serie de propiedades, algunas de las cuales son las siguientes: a) mod(u, imp(u, v)) v. b) mod(1, 1) = 1. c) mod(0, u) = v. d) u v mod(u, w) mod(v, w) d) La función mod() debe ser. monótona creciente con la certeza. del antecedente. c) De un antecedente completamente. falso puede concluirse cualquier. cosa. a) La función mod() tiene como. cota superior la certeza del. consecuente. b) Este es el límite booleano del. modus ponens. 33.")
34
Funciones generadoras del modus ponens que resultan de las definiciones de la función implicación presentadas anteriormente: 34

35
regla: si (el coche es viejo) entonces (el coche es ruidoso)
premisa: (el coche es bastante viejo) (el coche es bastante ruidoso) Todas estas expresiones son válidas para la realización de inferencia en casos análogos al siguiente: regla: si (x es A) entonces (y es B) premisa: (x es A) (y es B) Y también en casos como el siguiente, donde A y A’ poseen la misma base de parámetros: regla: si (x es A) entonces (y es B) premisa: (x es A’ ) (y es B’) 35
 (el coche es bastante ruidoso) Todas estas expresiones son válidas para la realización de inferencia en casos análogos al siguiente: regla: si (x es A) entonces (y es B) premisa: (x es A) (y es B) Y también en casos como el siguiente, donde A y A’ poseen la misma base de parámetros: regla: si (x es A) entonces (y es B) premisa: (x es A’ ) (y es B’) 35.")
36
Razonamiento difuso basado en la composición Max-Min
Sean A y A’ conjuntos difusos en X y sea B otro conjunto difuso en Y. Supongamos que la implicación difusa (A B) definida sobre X x Y se expresa como: Consideremos la regla, si (x es A) entonces (y es B) y la premisa (x es A’ ) El conjunto difuso inducido B’, se define según hemos visto como Nótese que esta definición de la implicación no es sino una expresión equivalente a imp3(u, v). 36
 definida sobre X x Y se expresa como: Consideremos la regla, si (x es A) entonces (y es B) y la premisa. (x es A’ ) El conjunto difuso inducido B’, se define según hemos visto como. Nótese que esta definición de la implicación no es sino una expresión equivalente a imp3(u, v). 36.")
37
1. Una regla con un único antecedente
Para este caso la ecuación anterior se transforma en: donde w representa un índice de compatibilidad entre la premisa y el antecedente de la regla. A A’ B w B’ x x 37

38
2. Una regla con dos antecedentes
si (x es A) y (y es B) entonces (z es C) (x es A’ ) y (y es B’ ) (z es C’ ) Una regla de este tipo puede representarse por una implicación A x B C de manera que: 38
 y (y es B) entonces (z es C) (x es A’ ) y (y es B’ ) (z es C’ ) Una regla de este tipo puede representarse por una implicación A x B C de manera que: 38.")
39
donde w1 w2 se puede asociar con el grado de satisfacción
o intensidad de disparo de la regla 39

40
2. Una regla con dos antecedentes
min A A’ B B’ C w1 C’ w2 x x 40 x

41
3. Múltiples reglas con múltiples antecedentes
La interpretación de múltiples reglas se toma usualmente como la unión de las inferencias difusas obtenidas de cada una de las reglas. hecho: (x es A’ ) y (y es B’ ) regla 1: si (x es A1) y (y es B1) entonces (z es C1) regla 2: si (x es A2) y (y es B2) entonces (z es C2) consecuencia: (Z es C’ ) Resulta intuitivo observar que del caso anterior C’ = C1 C2 41
 y (y es B’ ) regla 1: si (x es A1) y (y es B1) entonces (z es C1) regla 2: si (x es A2) y (y es B2) entonces (z es C2) consecuencia: (Z es C’ ) Resulta intuitivo observar que del caso anterior C’ = C1 C")
42
min A1 A’ B1 B’ C1 w11 C’1 w12 x x x A2 A’ B2 B’ C2 w21
max C’ 42 x

43
Cuando una regla difusa asume la forma
“si (x es A) o (y es B) entonces (z es C)” la intensidad de disparo de la regla (w) viene dada por el máximo de los grados de correspondencia de los antecedentes. Esto es: donde: 43
 o (y es B) entonces (z es C) la intensidad de disparo de la regla (w) viene dada por el máximo de los grados de correspondencia de los antecedentes. Esto es: donde: 43.")
44
Métodos de concentración (Defuzzification)
x A La utilización de reglas de inferencia difusas produce, tras la evaluación, un conjunto difuso para cada variable del modelo: Ejemplo: si (x es X) entonces (D es A) si (y es Y) entonces (D es B) si (z es Z) entonces (D es C) El conjunto resultante D es un conjunto difuso que representa a una cierta variable D a la que normalmente es necesario asignar un valor escalar. B D y y C Valor escalar 44 y
 entonces (D es A) si (y es Y) entonces (D es B) si (z es Z) entonces (D es C) El conjunto resultante D es un conjunto difuso que representa a una cierta variable D a la que normalmente es necesario asignar un valor escalar. B. D. y. y. C. Valor escalar. 44. y.")
45
Métodos de concentración (Defuzzification)
Posibles medidas menor de maximos Todos son métodos heurísticos para encontrar “el valor” que mejor representa o sintetiza la información contenida en el conjunto difuso. media de maximos mayor de maximos centroide Uno de los más empleados: Centroide: x 45

46
Control Difuso de una turbina de vapor
Un caso de estudio: Control Difuso de una turbina de vapor Introducción: Se pretende controlar la inyección de combustible en una turbina de vapor al objeto de mantener constante la velocidad. La cantidad de combustible que se consume por unidad de tiempo (tasa de consumo) se incrementa o disminuye mediante la apertura o cierre, repectivamente, de la válvula de inyección en función de la temperatura y la presión en la caldera. 46
 se incrementa o disminuye mediante la apertura o cierre, repectivamente, de la válvula de inyección en función de la temperatura y la presión en la caldera. 46.")
47
Controlador de la válvula de inyección
Se pretende controlar la inyección de combustible en una turbina de vapor al objeto de mantener constante la velocidad. La cantidad de combustible que se consume por unidad de tiempo (tasa de consumo) se incrementa o disminuye mediante la apertura o cierre, repectivamente, de la válvula de inyección en función de la temperatura y la presión en la caldera. Sensor RPM RPM(t) RPM(t) Sensor RPM T(t) Sensor de temperatura Controlador de la válvula de inyección I(t) Planta de la turbina Sensor de presión P(t) Sensores 47
 se incrementa o disminuye mediante la apertura o cierre, repectivamente, de la válvula de inyección en función de la temperatura y la presión en la caldera. Sensor. RPM. RPM(t) RPM(t) Sensor. RPM. T(t) Sensor de. temperatura. Controlador de la válvula de inyección. I(t) Planta de la turbina. Sensor de. presión. P(t) Sensores. 47.")
48
1. Descomponer cada variable del modelo en un conjunto de regiones difusas (vocabulario de cada variable) MUY_BAJA MUY_ALTA OPTIMA BAJA ALTA 1 TEMPERATURA ºC 48

49
MUY_BAJA MUY_ALTA OPTIMA BAJA ALTA 1 PRESIÓN Kg/m2 49

50
ACCIONES SOBRE LA VÁLVULA
CERRAR_UN_POCO (CP) CERRAR_MUCHO (CM) ABRIR_UN_POCO (AP) ABRIR_MUCHO (AM) DEJAR_IGUAL (OK) CERRAR (C) ABRIR (A) 1 ACCIONES SOBRE LA VÁLVULA cm/sg 50
 CERRAR_MUCHO (CM) ABRIR_UN_POCO (AP) ABRIR_MUCHO (AM) DEJAR_IGUAL (OK) CERRAR (C) ABRIR (A) 1. ACCIONES SOBRE LA VÁLVULA cm/sg. 50.")
51
2. Sintetizar las reglas de control (base de conocimiento)
Por ejemplo: [R1] Si la temperatura es baja y la presión es muy_baja entonces la acción sobre la válvula es abrir_mucho [R2] Si la temperatura es baja y la presión es baja entonces la acción sobre la válvula es abrir [R3] Si la temperatura es baja y la presión es óptima entonces la acción sobre la válvula es dejar_igual [R4] Si la temperatura es baja y la presión es alta entonces la acción sobre la válvula es cerrar 51

52
3. El Algoritmo A. Leer los sensores de presión y temperatura
B. Hacer solución(x) = 0 C. Para todas la reglas cuyos antecedentes no sean nulos C.1 Obtener el mínimo de todos los predicados conectados por operadores conjuntivos (AND) en el antecedente de la regla. Pcerteza = min(E1, E2, ..., En) C.2 Obtener la certeza de la regla control(x) = min( regla(x), Pcerteza ) C.3 Asignar el conjunto difuso obtenido en control(x) al conjunto solución mediante una operación de máximo (OR) solución(x) = max( solución(x), control(x) ) D. Concentrar solución(x) (p.e. obteniendo el centroide) para obtener el valor escalar que requiere la acción de control. 52
 = 0. C. Para todas la reglas cuyos antecedentes no sean nulos. C.1 Obtener el mínimo de todos los predicados conectados por operadores conjuntivos (AND) en el antecedente de la regla. Pcerteza = min(E1, E2, ..., En) C.2 Obtener la certeza de la regla. control(x) = min( regla(x), Pcerteza ) C.3 Asignar el conjunto difuso obtenido en control(x) al conjunto solución mediante una operación de máximo (OR) solución(x) = max( solución(x), control(x) ) D. Concentrar solución(x) (p.e. obteniendo el centroide) para obtener el valor escalar que requiere la acción de control. 52.")
53
Las reglas cuyos antecedentes no son nulos son:
Veamos como funciona Supongamos que tras leer los sensores, la presión cae dentro del dominio de los conjuntos difusos OPTIMA y BAJA; y la temperatura se incluye dentro del conjunto difuso BAJA. Las reglas cuyos antecedentes no son nulos son: [R2] Si la temperatura es baja y la presión es baja entonces la acción sobre la válvula es abrir [R3] Si la temperatura es baja y la presión es óptima entonces la acción sobre la válvula es dejar_igual 53

54
CERRAR_UN_POCO (CP) CERRAR_MUCHO (CM) ABRIR_UN_POCO (AP) ABRIR_MUCHO (AM) DEJAR_IGUAL (OK) MUY_BAJA MUY_ALTA CERRAR (C) OPTIMA ABRIR (A) MUY_BAJA MUY_ALTA OPTIMA BAJA ALTA BAJA ALTA 1 1 1 ºC Kg/m2 cm/sg 54
 OPTIMA. ABRIR (A) MUY_BAJA. MUY_ALTA. OPTIMA. BAJA. ALTA. BAJA. ALTA ºC Kg/m cm/sg. 54.")
55
0.57 0.48 0.48 0.25 Temperatura Presión Centroide= 23 cm/sg
1 BAJA 1 BAJA 1 ABRIR (A) 0.57 0.48 ºC Kg/m2 cm/sg 1 BAJA 1 OPTIMA 1 DEJAR_IGUAL (OK) 0.48 0.25 ºC Kg/m2 cm/sg 1 Temperatura Presión DEJAR_IGUAL (OK) Centroide= 23 cm/sg Acciones de control sobre la vávula cm/sg 55
 ºC Kg/m cm/sg. 1. BAJA. 1. OPTIMA. 1. DEJAR_IGUAL (OK) ºC Kg/m cm/sg. 1. Temperatura. Presión. DEJAR_IGUAL (OK) Centroide= 23 cm/sg. Acciones de control. sobre la vávula cm/sg. 55.")
56
Bibliografía. [Cox-94] E. Cox The Fuzzy Systems Handbook
Academic Press, 1994 [Bend-96] E. Bender Mathematical Methods in Artificial Intelligence IEEE Computer Society Press, 1996. 56
![Bibliografía. [Cox-94] E. Cox The Fuzzy Systems Handbook](http://slideplayer.es/slide/321072/2/images/56/Bibliograf%C3%ADa.+%5BCox-94%5D+E.+Cox+The+Fuzzy+Systems+Handbook.jpg "Academic Press, [Bend-96] E. Bender. Mathematical Methods in Artificial Intelligence. IEEE Computer Society Press,")
Presentaciones similares





 Noviembre de 2004.>")













