Descargar la presentación
La descarga está en progreso. Por favor, espere

1
DISEÑO E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL NEURONAL DE TEMPERATURA UTILIZANDO EL SOFTWARE NEUROSYSTEMS DE SIEMENS. Patricio Suquillo Q.

2
Introducción Se implementaran tres tipos de neurocontroladores:
Con modelo de Referencia. Con red neuronal inversa. Con identificación de un controlador. Neurocontroladores (entrenamiento) Generación de módulos neuronales Desarrollo de Interfaz HMI en WinCC. Cargar Aplicaciones NeuroSystems Acondicionamiento de señales. Obtención de variables. Neurocontroladores (Diseño y Simulación) Patrones de entrenamiento. Control de temperatura con neurocontroladores desarrollados.
 Generación de módulos neuronales. Desarrollo de Interfaz HMI en WinCC. Cargar Aplicaciones NeuroSystems. Acondicionamiento de señales. Obtención de variables. Neurocontroladores (Diseño y Simulación) Patrones de entrenamiento. Control de temperatura con neurocontroladores desarrollados.")
3
Célula elemental del sistema nervioso.
Neurona Biológica Sinapsis.- Conexión entre neuronas: *Eléctrica descargas en el soma o cuerpo. *Química intercambio de neurotransmisores. Funcionalmente se puede establecer una similitud a procesadores sencillos con un canal de entrada de información, las dendritas un órgano de computo, el soma y un canal de salida, el axón. Aprendizaje.- establecimiento de nuevas conexiones, ruptura de otras, ponderación de las intensidades sinápticas (plasticidad), o incluso mediante muerte neuronal. Célula elemental del sistema nervioso. Con el fin de establecer el paralelismo entre los sistemas biológicos y artificiales se describirá algunas características particulares de la neurona biologica. APRENDIZAJE Este tipo de acciones en especial la modificación de las intensidades sinápticas serán las que utilicen los sistemas neuronales artificiales para llevar a cabo el aprendizaje”
, o incluso mediante muerte neuronal. Célula elemental del sistema nervioso. Con el fin de establecer el paralelismo entre los sistemas biológicos y artificiales se describirá algunas características particulares de la neurona biologica. APRENDIZAJE Este tipo de acciones en especial la modificación de las intensidades sinápticas serán las que utilicen los sistemas neuronales artificiales para llevar a cabo el aprendizaje")
4
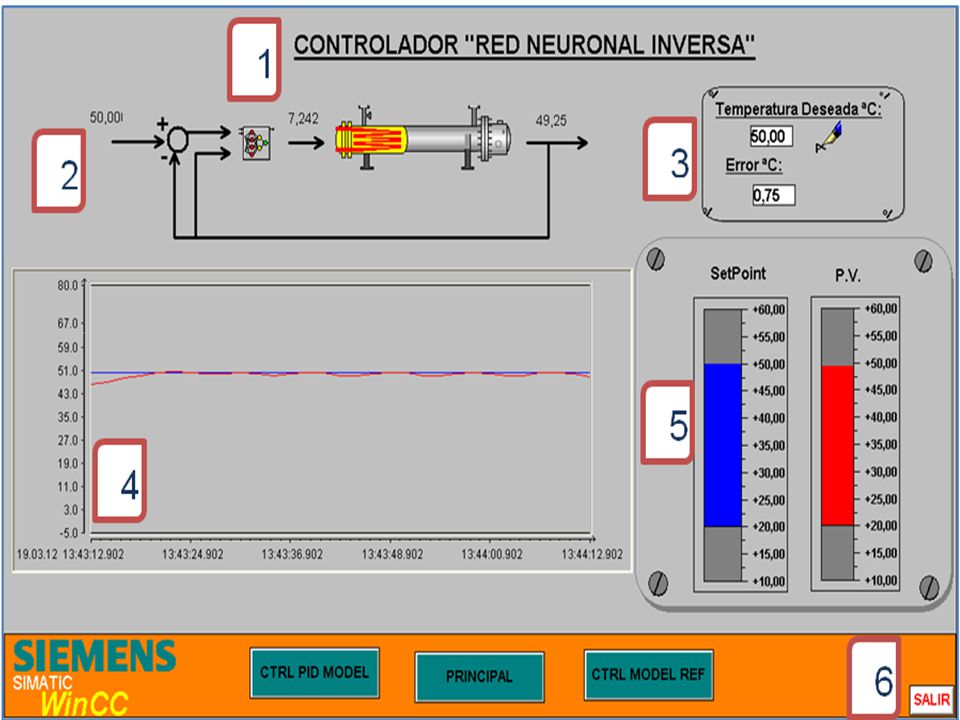
Diseño: Controlador con red neuronal inversa.
Consiste en aproximar mediante una red neuronal la dinámica inversa de la planta. Es una estructura de estado estable, la cual puede ser usada para control siempre que el proceso sea monótono

5
Diseño: Controlador con modelo de referencia lineal.
Ajustar la señal de control de una forma estable para que la salida de la planta tienda a la salida del modelo de referencia. El error entre la salida del modelo y la respuesta de la planta es usado como señal de retroalimentación para el controlador. Para entrenar: Pesos sinápticos de la planta “Fijos” Pesos sinápticos del Controlador “Modifican” Se ajustan por retropropagación del error. Modelo de Referencia Lineal

6
Diseño: Controlador con Identificación de un controlador ya existente.
Consiste en usar una red neuronal para identificar un controlador existente. Si se tratase de modelar un controlador PID, la red neuronal requiere a parte del error instantáneo entre el punto de operación y la salida del proceso, la integral y la derivada del error. Alternativamente, se puede entrenar una red neuronal con los errores y/o las salidas del controlador.

7
Modelamiento de la Planta
ℎ.𝐴.( 𝑇 ∞ −𝑇)=𝑚. 𝐶 𝑝 . 𝑑𝑇 𝑑𝑡 𝑑𝑡 = 𝑚. 𝐶 𝑝 ℎ.𝐴. ∗ 𝑑𝑇 ( 𝑇 ∞ −𝑇) 0 𝑡 𝑑𝑡 = 𝑚.𝑐 𝑝 ℎ.𝐴 . 𝑇 0 𝑇 𝑑𝑇 ( 𝑇 ∞ −𝑇) 𝑡| 𝑡 0 = 𝑚.𝑐 𝑝 ℎ.𝐴 .[−ln( 𝑇 ∞ −𝑇)| 𝑇 𝑇 0 ] 𝑡= −𝑚.𝑐 𝑝 ℎ.𝐴 . ln 𝑇 ∞ −𝑇 𝑇 ∞ − 𝑇 0 𝑒 − ℎ.𝐴 𝑚.𝑐 𝑝 ∗𝑡 = 𝑇 ∞ −𝑇 𝑇 ∞ − 𝑇 0 𝑇 ∞ − 𝑇 ∞ − 𝑇 0 . 𝑒 − ℎ.𝐴 𝑚.𝑐 𝑝 ∗𝑡 = 𝑇 (−0.41) 𝑋 X+0.8 𝑇asa de calor acumulado. 𝑞= 𝑚 . 𝐶 𝑝 . 𝑑𝑇 𝑑𝑡 𝑇asa de calor transferida. 𝑞=ℎ.𝐴.( 𝑇 ∞ −𝑇) ℎ∗𝐴 𝑚∗ 𝐶 𝑝 45 𝑗 𝑠∗ 𝑚 2 ∗°𝐶 ∗5.73𝑥 10 −4 𝑚 𝑥 10 −3 𝑔 𝑠 ∗ 𝑗 𝑔.𝐶° =11.69 seg
=𝑚. 𝐶 𝑝 . 𝑑𝑇 𝑑𝑡. 𝑑𝑡 = 𝑚. 𝐶 𝑝 ℎ.𝐴. ∗ 𝑑𝑇 ( 𝑇 ∞ −𝑇) 0 𝑡 𝑑𝑡 = 𝑚.𝑐 𝑝 ℎ.𝐴 . 𝑇 0 𝑇 𝑑𝑇 ( 𝑇 ∞ −𝑇) 𝑡| 𝑡 0 = 𝑚.𝑐 𝑝 ℎ.𝐴 .[−ln( 𝑇 ∞ −𝑇)| 𝑇 𝑇 0 ] 𝑡= −𝑚.𝑐 𝑝 ℎ.𝐴 . ln 𝑇 ∞ −𝑇 𝑇 ∞ − 𝑇 0. 𝑒 − ℎ.𝐴 𝑚.𝑐 𝑝 ∗𝑡 = 𝑇 ∞ −𝑇 𝑇 ∞ − 𝑇 0. 𝑇 ∞ − 𝑇 ∞ − 𝑇 0 . 𝑒 − ℎ.𝐴 𝑚.𝑐 𝑝 ∗𝑡 = 𝑇. (−0.41) 𝑋 X+0.8. 𝑇asa de calor acumulado. 𝑞= 𝑚 . 𝐶 𝑝 . 𝑑𝑇 𝑑𝑡. 𝑇asa de calor transferida. 𝑞=ℎ.𝐴.( 𝑇 ∞ −𝑇) ℎ∗𝐴 𝑚∗ 𝐶 𝑝. 45 𝑗 𝑠∗ 𝑚 2 ∗°𝐶 ∗5.73𝑥 10 −4 𝑚 𝑥 10 −3 𝑔 𝑠 ∗1.012 𝑗 𝑔.𝐶° =11.69 seg.")
8
Diseño y Entrenamiento de los neurocontroladores
Estructura Neuronal Creación de la Red Neuronal NCtrl con red neuronal inversa. NCtrl con modelo de referencia. Entrenamiento NCtrl con Identificación de PID.

9
Entrenamiento Ctrl_Inv
Se deberá diseñar y obtener una red neuronal que presente un comportamiento inverso al de la planta. Patrones de entrenamiento La curva de aprendizaje converge a partir de la iteración 3000, presentando un error de 4.4 %.

10
Entrenamiento Ctrl_Inv
Distribución estadística de los valores en las variables en el archivo de entrenamiento Indica el número de muestras para cada valor de las variables, mostrando en el eje X el valor de la variable, eje y cantidad de muestras para ese valor Relevancia de entradas. Indica la relevancia de la variable “Dtemp” en el proceso de control.

11
Entrenamiento Ctrl_Inv
Simulación y Desempeño de la red neuronal entrenada. En el eje Z, se grafica la señal de control dentro del área de entrenamiento. Varia las entradas y genera los posibles escenarios , obteniendo la señal de control en rojo [-10 12]

12
Entrenamiento Ctrl_Mref
La salida de la planta deberá tender a la salida del modelo de referencia. Patrones de entrenamiento LRM deberá describir el comportamiento ideal del sistema controlado. (Controlador + Planta) La curva de aprendizaje converge a partir de la iteración 100 presentando un error de 3.39 %.
 La curva de aprendizaje converge a partir de la iteración 100 presentando un error de 3.39 %.")
13
Entrenamiento Ctrl_Mref
Distribución estadística de los valores de las variables en el archivo de entrenamiento Indica el número de muestras para cada valor de las variables, mostrando en el eje X el valor de la variable, eje y cantidad de muestras para ese valor Relevancia de entradas. Indica la relevancia de la variable “Estado” en el proceso de control.

14
Entrenamiento Ctrl_Mref
Simulación y Desempeño de la red neuronal entrenada. En el eje Z, se grafica la señal de control dentro del área de entrenamiento. Varia las entradas y genera los posibles escenarios , obteniendo la señal de control en rojo [-0.2 8]

15
Entrenamiento Ctrl_Id_PID
Se deberá obtener la identificación del controlador PID, usando redes neuronales, verificando su entrenamiento y posterior funcionalidad Patrones de entrenamiento La curva de aprendizaje converge a partir de la iteración 500 presentando un error de 19 %. Para reducir el error proporcionar la integral o derivada del error.

16
Entrenamiento Ctrl_Id_PID
Análisis de Patrones de Entrenamiento Se grafican todos los patrones de entrenamiento que contiene el archivo de aprendizaje, y en rojo la salida proporcionada por la red neuronal entrenada. La variable Dtemp representa el error instantáneo que ingresa al bloque PID La variable U es la salida del controlador PID

17
Entrenamiento Ctrl_Id_PID
Simulación y Desempeño de la red neuronal entrenada. Varia las entradas y genera los posibles escenarios , obteniendo la señal de control en rojo [0 10]

18
Diagrama Funcional. [entrada1 entrada2 salida]
Neurocontrolador con red neuronal inversa. Neurocontrolador con modelo de referencia. Neurocontrolador con Identificación de controlador PID.
![Diagrama Funcional. [entrada1 entrada2 salida]](http://slideplayer.es/slide/1649932/6/images/18/Diagrama+Funcional.+%5Bentrada1+entrada2+salida%5D.jpg "Neurocontrolador con red neuronal inversa. Neurocontrolador con modelo de referencia. Neurocontrolador con Identificación de controlador PID.")
19
Procedimiento Hardware
Diagrama de Conexión Dispositivos Utilizados PLC S7-300 CPU 315F-2 PN/DP SM 334 AI4/AO2 Micro Memory Card Computador PG-PC Modulo de Temperatura, Cable Ethernet Industrial CAT6. Conectores E/S Analógicas.

20
Procedimiento Software
Siemens Step7 Administrador Simatic HW Config Editor de Símbolos KOP/AWL/FUP NeuroSystems WinCC Graphics Designer

21
Vinculación de entradas a la RNA con variables WinCC Ctrl_Id_PID
Graphics Designer Vinculación de entradas a la RNA con variables WinCC Ctrl_Mref Vinculación de entradas a la RNA con variables WinCC Ctrl_Inv Dependiendo del controlador entrenado la vinculación de las entradas varia por lo cual se proporcionan tres imágenes que marcan la diferencia en la funcionalidad de cada neurocontrolador. Vinculación de entradas a la RNA con variables WinCC Ctrl_Id_PID

22
Graphics Designer Permitirá grabar 1 en la variable trigger necesario para la visualización. Los resultados obtenidos por el bloque NeuroSystems necesitan ser vinculados con la variable externa “U”

25
Desempeño de los Neurocontroladores 5060 °C.
Ctrl_Inv, error 0.94 °C Ctrl_Mref, error 0.9 °C Ctrl_Id_PID, error 1.42 °C

26
Perturbaciones posición 1 4 a 45°C.
Ctrl_Inv, error 0.62 °C Ctrl_Mref, error 0.29 °C Ctrl_Id_PID, error 0.74 °C

27
Análisis de resultados.

28
Análisis de resultados.
Del análisis realizado en las pruebas efectuadas a los diferentes controladores se puede determinar: Área de funcionamiento óptima ubicada en rangos de temperatura cercanos a los 50°C. La perturbación genera un incremento del error. El neurocontrolador con red neuronal inversa presenta la acción de control mas rápida.

29
CONCLUSIONES Y RECOMENDACIONES

30
Conclusiones Los neurocontroladores presentan una respuesta bastante apropiada para el control de temperatura y perturbaciones inesperadas. Se presento un error en estado estable aproximado de 2°C, por modelamiento matemático empírico. El tiempo de muestreo es un parámetro crítico en la obtención de patrones de entrenamiento. En el controlador con modelo de referencia lineal, surgieron falencias para decrementos de temperatura con tiempos prolongados y sin alcanzar el descenso de temperatura requerido.

31
Conclusiones La zona de más importancia y que mejor definida debe estar, es la zona comprendida entre ±2°C de diferencia de temperatura . Cuando el entrenamiento cae en un mínimo local sin satisfacer el porcentaje de error permitido se puede considerar: cambiar la topología de la red, modificar los parámetros de aprendizaje o presentar los patrones en otro orden. La estructura idónea está constituida por 4 capas con 8 y 12 neuronas en la capa 2 y 3 respectivamente.

32
Recomendaciones. Sistema operativo Windows XP SP2.
Instalación de AuthorSW para poder migrar la licencia desde el disco de hacia un disco duro con interfaz USB 2.0 y luego poder transferirla a la PC. Direccionamiento de la red permita la comunicación entre los dispositivos y la maquina virtual, por lo que se recomienda la configuración del adaptador de red o puente entre el host y la maquina virtual.

33
Recomendaciones. Extremo cuidado con el modulo analógico SM334, debido a que la inversión de la polaridad en la alimentación de las entradas analógicas produce la destrucción de los 4 canales de entradas, ya que no están separados galvánicamente. La nueva tecnología TIA Totally Integrated Automation que proporciona una forma sencilla a través de una sola pantalla, una sola plataforma de programación y configuración. Para cargar los neurocontroladores al PLC, se recomienda la adquisición de Simatic SoftNet S7/PB junto a la interface MPI—USB ya disponible.

Presentaciones similares