Descargar la presentación
La descarga está en progreso. Por favor, espere

1
DEPARTAMENTO DE ENERGÍA Y MECÁNICA Carrera de Ingeniería Mecánica
Carrera de Ingeniería Mecánica TITULO DEL PROYECTO “DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN PROTOTIPO EXPERIMENTAL PARA EL ESTUDIO Y APLICACIÓN DE UN ABSORBENTE DINÁMICO DE VIBRACIONES Y SU SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS PARA EL LABORATORIO DE MECANISMOS Y SERVOMECANISMOS DEL DECEM” DIANA MARIBEL ANDINO ARCOS KARINA MAGDALENA REYESTERÁN DIRECTOR: ING. HERNÁN LARA CODIRECTOR: ING. JAIME ECHEVERRÍA A continuación la exposición del proyecto de grado previo a la obtención de nuestro título

2
CONTENIDO INTRODUCCIÓN MODELOS UTILIZADOS EN EL ESTUDIO DE VIBRACIONES
DISEÑO DEL EQUIPO ANÁLISIS DE RESULTADOS CONCLUSIONES Y RECOMENDACIONES

3
INTRODUCCIÓN El Prototipo Experimental para el Análisis de las Curvas características de un Absorbente de Vibraciones Dinámicas y el Sistema de Adquisición de Datos que se va a implementar en el Laboratorio de Mecanismos y Servomecanismos del DECEM, está dotado de un motor, en la parte superior del equipo está una viga rectangular, en la cual está acoplado un Absorbente, además en el acople de la viga se ha adherido un acelerómetro el que se encargará de medir las vibraciones. Los alumnos que utilizarán este equipo analizaran las curvas características de aceleración, velocidad y desplazamiento a partir de las vibraciones que emite el sistema y su decaimiento con el absorbente, las cuales se reflejaran en un software.

4
OBJETIVO GENERAL Diseñar y Construir un absorbente dinámico para analizar el comportamiento y sus posibles aplicaciones como mecanismos pasivos para controlar las vibraciones.

5
OBJETIVO ESPECÍFICOS Estudiar las alternativas para la adquisición de datos. Obtener las diferentes curvas características del sistema sometido a vibración. Determinar el rango de operación de la frecuencia emitida por la vibración del motor.

6
ALCANCE El alcance comprende los siguientes aspectos:
Diseño Construcción e Implementación de: Prototipo Experimental. Sistema de Adquisición de Datos. Absorbente de Vibraciones. Validación del prototipo. Manuales Técnicos y de Operación. Estructuración de prácticas de laboratorio.

7
MODELOS UTILIZADOS EN EL ESTUDIO DE VIBRACIONES
Modelo de 1 gdl sin amortiguamiento, con fuerza armónica. Ec. de movimiento:

8
Se define la frecuencia natural como:
Respuesta del sistema: donde: Esta ecuación es válida para:

9
ABSORBEDOR DINÁMICO DE VIBRACIONES
Es un dispositivo mecánico que se usa para disminuir o eliminar la vibración mecánica indeseada. Consiste en un sistema masa – resorte, que se añade a un sistema principal, para sintonizarlo a una frecuencia particular y de este modo disminuir la amplitud de la vibración. El absorbedor añade 1 gdl al sistema convirtiéndolo en uno de 2 gdl. Absorbedor Sistema principal

10
x1= X1 sin(ωft) x2= X2sin(ωft)
Modelo de 2 gdl sin amortiguamiento, con fuerza armónica. Ecuación de movimiento: La solución a este sistema es armónica de la forma: x1= X1 sin(ωft) x2= X2sin(ωft)
 x2= X2sin(ωft)")
11
AMPLITUDES Donde: X1= Amplitud del sistema principal
X2= Amplitud del absorbedor ω11=Frecuencia natural del sistema principal ω22=Frecuencia natural del absorbedor β = Relación de masas

14
PARÁMETROS GENERALES DE DISEÑO
DISEÑO DEL EQUIPO PARÁMETROS GENERALES DE DISEÑO Peso del sistema Frecuencia natural Potencia Frecuencia de Excitación Módulo de Young Inercia y Longitud de la viga

15
ESTUDIO Y SELECCIÓN DE ALTERNATIVAS DE DISEÑO
SELECCIÓN DEL EQUIPO Alternativa 1: Absorbedor dinámico de vibraciones de masa – viga.

16
Alternativa 2: Absorbedor dinámico de vibraciones de masa – resorte.

17
Alternativa 3. Absorbedor dinámico de vibraciones pendular.

18
SELECCIÓN DE LA ALTERNATIVA ÓPTIMA
COSTO TOTAL Engranes Poleas Dentadas Poleas Acanaladas Empotrado - Libre Simplemente apoyada Articulada en los dos extremos Masa Masa - Resorte Péndulo Motor AC Motor DC Servomotor Circular Rectangular SISTEMA DE TRANSMISION Alt. 1 3 Alt. 2 5 Alt. 3 1 SISTEMA DE APOYO 13 SISTEMA DE ABSORBEDOR 15 17 SISTEMA MOTRIZ/ EXCITACIÓN MASA PRINCIPAL

19
MANUFACTURA TOTAL Engranes Poleas Dentadas Poleas Acanaladas
MANUFACTURA TOTAL Engranes Poleas Dentadas Poleas Acanaladas Empotrado - Libre Simplemente apoyada Articulada en los dos extremos Masa Masa - Resorte Péndulo Circular Rectangula SISTEMA DE TRANSMISION Alt. 1 3 Alt. 2 5 Alt. 3 1 SISTEMA DE APOYO 6 SISTEMA DE ABSORBEDOR 16 10 SISTEMA MOTRIZ/ EXCITACIÓN MASA PRINCIPAL

20
Articulada en los dos extremos Masa Masa - Resorte Péndulo Motor AC
OPERATIVIDAD TOTAL Engranes Poleas Dentadas Poleas Acanaladas Empotrado - Libre Simplemente apoyada Articulada en los dos extremos Masa Masa - Resorte Péndulo Motor AC Motor DC Servomotor Circular Rectangula SISTEMA DE TRANSMISION Alt. 1 3 Alt. 2 5 Alt. 3 1 SISTEMA DE APOYO 11 SISTEMA DE ABSORBEDOR 15 17 SISTEMA MOTRIZ/ EXCITACIÓN MASA PRINCIPAL

21
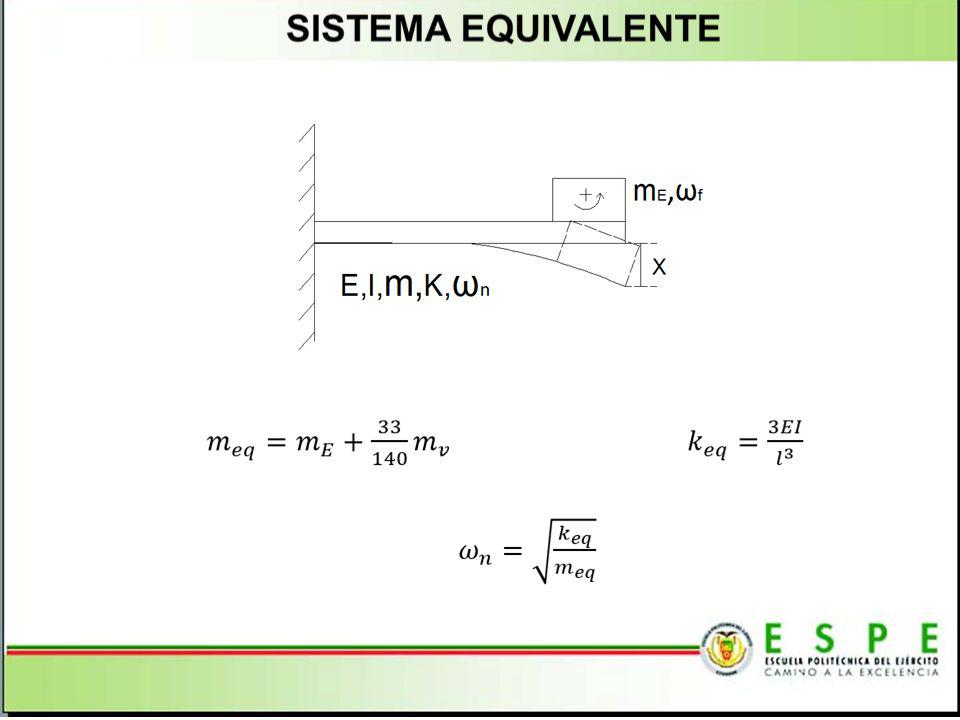
CÁLCULO DE LA FRECUENCIA NATURAL
Ecuación general de la frecuencia natural del sistema. .

22
MASA DEL SISTEMA PRINCIPAL
L=500 mm mE Módulo de ωn [Hz] Inercia kg Young [Mpa] Sim. Cal. m4 10 210000 13,48 15,76 2.04x10 -8 11 12,73 15,06 12 12,52 14,44 13 11,51 13,90

23
CÁLCULO Estático DE LA VIGA
Diagrama de fuerzas Diagrama de cortante Diagrama de momentos

25
CÁLCULO DINÁMICO DE LA VIGA
Al realizar los diferentes cálculos obtenemos un factor de seguridad de 2,65; lo que quiere decir que el dimensionamiento de la viga es el adecuado.

26
SISTEMA DE MOTRÍZ El sistema está impulsado por un motor:
Corriente: AC Velocidad: rpm Voltaje: 110 V

27
SELECCIÓN DE LA FRECUENCIA FORZADA

28
FUERZA ARMÓNICA Para producir el efecto de una fuerza armónica se emplea dos discos de desbalance que giran a una velocidad constante ωd = 2333rpm, la cuál constituye la frecuencia forzada, (ωd =ωf = 38,8Hz). EXCENTRICIDAD (e) DESBALANCE (U) e1= 1,32 m e2= 0,97 m e3= 3,01 m
. EXCENTRICIDAD (e) DESBALANCE (U) e1= 1,32 m. e2= 0,97 m. e3= 3,01 m.")
29
CARGA ARMÓNICA RESULTANTE DEL DESBALANCE

30
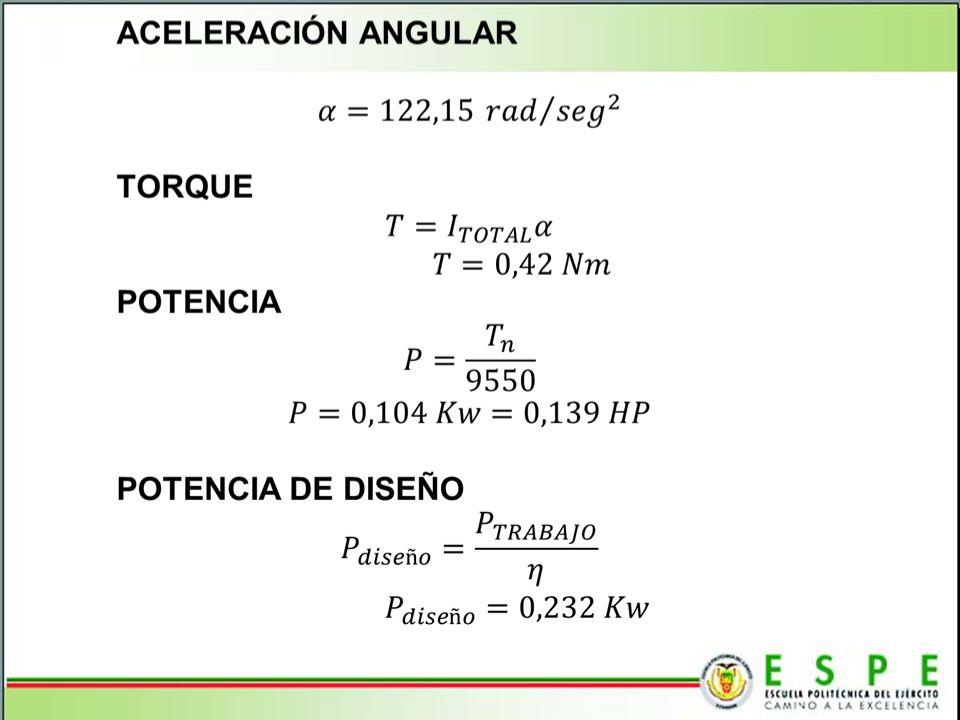
CÁLCULO DE LA POTENCIA DEL MOTOR
Parámetros Inercia de las masas en movimiento. Aceleración angular. El torque necesario para mover los elementos.

31
Inercia de los elementos
Densidad ρ (Kg/m3) Inercia I (Kg.m2) Eje 7850 Discos Polea 2700 2,87x10-5 Disco-polea INERCIA TOTAL 3,49x10-3
 Inercia. I (Kg.m2) Eje Discos. Polea ,87x10-5. Disco-polea. INERCIA TOTAL. 3,49x10-3.")
33
EQUIPO COMPLETO

34
PROCESO DE LA ADQUISICIÓN DE DATOS
La principal función es transmitir las señales analógicas y/o discretas por medio de sus canales de entrada tomadas a través de diferentes sensores. PROCESO DE LA ADQUISICIÓN DE DATOS

35
CRITERIOS DE SELECCIÓN PARA SENSORES DE VIBRACIÓN MECÁNICA
Rango de frecuencias Sensibilidad típica Rango dinámico Sensibilidad a la humedad Sensibilidad magnética Rango de temperatura admisible:

36
TIPOS DE SENSORES PARA VIBRACIONES MECÁNICAS
Al analizar cada una de las características de los distintos sensores de vibración se elige un acelerómetro por sus parámetros, especificaciones técnicas y su bajo costo. Alta 5 Media 3 Baja 1 Tipos de Sensores Frecuencia (Hz) Sensibilidad Temp. Costo Total Desplazamiento 1 5 3 14 Aceleración 10 Velocidad 16
 Sensibilidad. Temp. Costo. Total. Desplazamiento Aceleración. 10. Velocidad. 16.")
37
Selección del acelerómetro
Alta 5 Media 3 Baja 1 Tipos de aceleróme tro Margen de medida Ancho de banda (Hz) Sensibilidad Temp. Costo Micromecánico 1 5 3 Piezo- eléctricos Piezo-resistivo Capacitivos Mecánicos Acelerómetro Total Micromecánico 11 Piezo-eléctricos 15 Piezo-resistivo 9 Capacitivos 21 Mecánicos
 Sensibilidad. Temp. Costo. Micromecánico Piezo- eléctricos. Piezo-resistivo. Capacitivos. Mecánicos. Acelerómetro. Total. Micromecánico. 11. Piezo-eléctricos. 15. Piezo-resistivo. 9. Capacitivos. 21. Mecánicos.")
38
ACELERÓMETRO -ACCM3D BUFFERED
Rango de sensado Triple axis ±3g Sensibilidad 360mV/g Ancho de banda 500Hz Voltaje de operación con regulador 3.5V to 15V Voltaje de operación sin regulador 2.0V to 3.6V Regulador puede alimentar microcontrolador externo 3.3V.

39
Característica de dispositivos de adquisición y tratamiento de datos
TIPOS COSTO PROGRAMACIÓN DISPONIBILIDAD EN EL MERCADO FUNCIONALIDAD CAPACIDAD DE ALMACENAMIENTO CONFIABILIDAD DAQ Alto Compleja Poco accesible Intermedia Alta ARDUINO Bajo Fácil Accesible Múltiple

40
CIRCUÍTO A IMPLEMENTAR

41
SIMULACIÓN NUMÉRICA SIN ABSORBEDOR

42
SIMULACIÓN NUMÉRICA Con Absorbedor

43
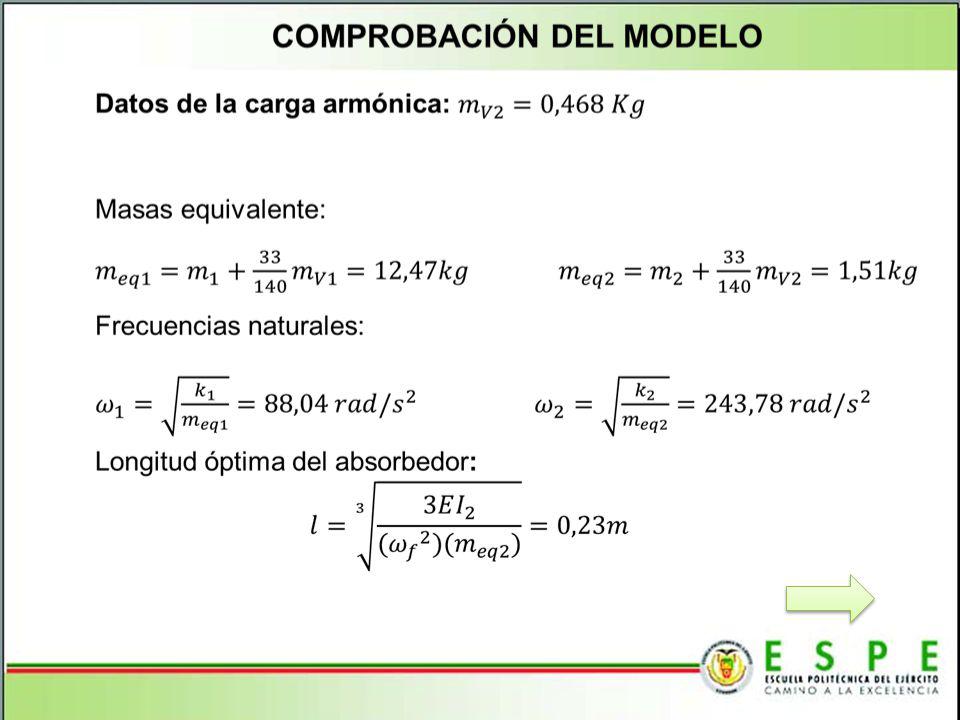
SOLUCIÓN DEL MODELO

46
PRUEBAS DE FUNCIONAMIENTO Y ANÁLISIS DE RESULTADOS
Las pruebas de funcionamiento son esenciales para analizar, verificar, comprobar y validar el estado completo del equipo. Datos absorbedor Pesos de desbalance

47
Error porcentual

48
PRUEBAS DE CONFIABILIDAD ANOVA
Las pruebas de confiabilidad sirven para determinar si el desempeño del absorbedor está en función de la distancia, como un parámetro fundamental. El programa utilizado para este análisis es Minitab, que sirve para analizar si el absorbedor es factible que absorba la vibración a cualquier longitud. El análisis se lo realiza al comparar cada una de las medias obtenidas en las distintas longitudes.

49
Amplitud de aceleración : 80 mm, 160 mm, 235 mm
PRUEBAS DE CONFIABILIDAD – ANOVA Amplitud de aceleración : 80 mm, 160 mm, 235 mm LEVEL N MEAN StDev 80 mm 30 4.445 0.923 160 mm 4.418 0.492 235 mm 3.062 0.559 Pooled StDev = 0,638 m/s2

50
MODELO IDEAL vs MODELO REAL SIN ABSORBEDOR
RESULTADOS MODELO IDEAL vs MODELO REAL SIN ABSORBEDOR

51
ANÁLISIS SISTEMA IDEAL - SISTEMA REAL CON ABSORBEDOR

52
COSTOS TOTALES

53
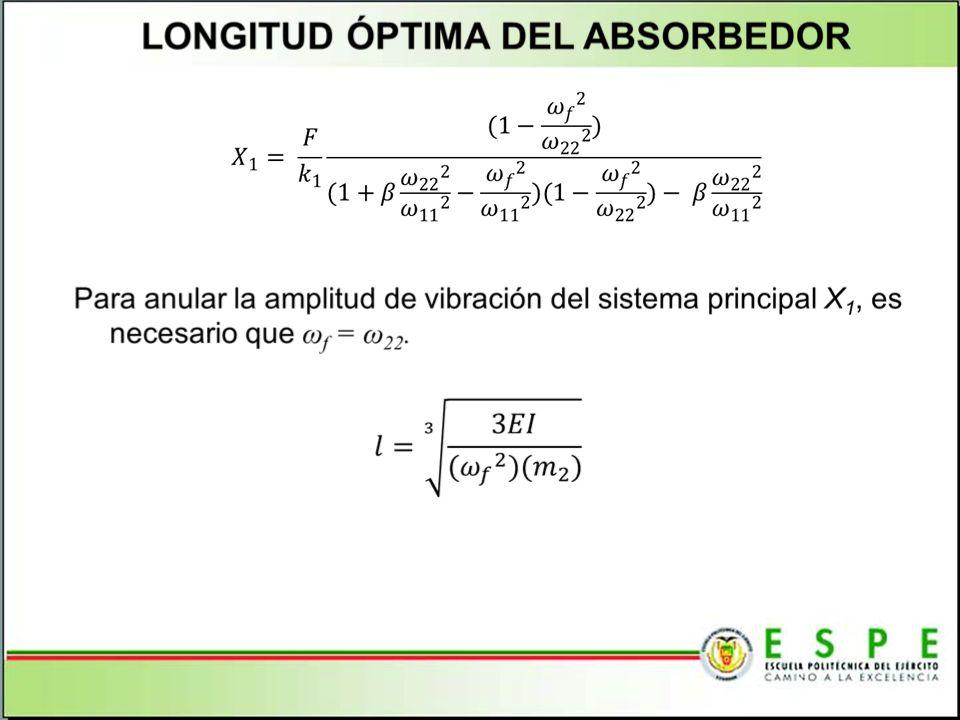
CONCLUSIONES Se determino que la longitud óptima del absorbedor es de 235mm por que a esta distancia se anulan las vibraciones del sistema principal, cuando se logra sintonizar la frecuencia forzada con la frecuencia del absorbedor. La relación óptima de la masa del sistema principal y del absorbedor es de 1/10. La relación de la frecuencia forzada y natural es de 2,7, eso quiere decir que el sistema es estable porque se encuentra lejos de la zona de resonancia.

54
Se concluyó que un acelerómetro es más confiable para determinar aceleración y velocidad, para el valor de la frecuencia aplicada en el proyecto. Se requiere una alta fidelidad en la construcción del sistema para conservar todas las condiciones planteadas en el modelo analítico y así obtener medidas confiables.

55
RECOMENDACIONES Para cada ensayo a realizar, el desbalance debe ser de la misma magnitud y estar en la misma posición para evitar el desfase. Hacer una instalación en red para el SAD, ya que la gran mayoría de equipos se encuentran automatizados en el laboratorio de mecanismos. Antes de empezar la toma de datos es recomendable que el equipo sea nivelado con respecto a la viga del sistema principal para evitar el desbalance.

56
GRACIAS

57
DEPARTAMENTO DE ENERGÍA Y MECÁNICA Carrera de Ingeniería Mecánica
Carrera de Ingeniería Mecánica TITULO DEL PROYECTO “DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN PROTOTIPO EXPERIMENTAL PARA EL ESTUDIO Y APLICACIÓN DE UN ABSORBENTE DINÁMICO DE VIBRACIONES Y SU SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS PARA EL LABORATORIO DE MECANISMOS Y SERVOMECANISMOS DEL DECEM” DIANA MARIBEL ANDINO ARCOS KARINA MAGDALENA REYESTERÁN DIRECTOR: ING. HERNÁN LARA CODIRECTOR: ING. JAIME ECHEVERRÍA A continuación la exposición del proyecto de grado previo a la obtención de nuestro título

Presentaciones similares














: Movimiento armónico simple>")





