Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Contenidos: 1. Reconocimiento de la diferencia entre marco de referencia y sistema de coordenadas y de su utilidad para describir el movimiento. 2.Aplicación de la fórmula de adición de velocidades en situaciones unidimensionales para comprobar la relatividad del movimiento, en contextos cotidianos. 3.Aplicación de la ley de Hooke para explicar los fundamentos y rangos de uso del dinamómetro, e identificación de algunas de sus aplicaciones corrientes. Unidad 3 Fuerza y Movimiento: Descripción del movimiento; Elasticidad y fuerzas

2
Objetivos de la unidad. Justificar la necesidad de introducir un marco de referencia y un sistema de coordenadas para describir el movimiento de los cuerpos. Describir investigaciones científicas clásicas asociadas al concepto de relatividad del movimiento, valorando el desarrollo histórico de conceptos y teorías. Caracterizar la ley de Hooke, los mecanismos y leyes físicas que permiten medir fuerzas empleando las propiedades elásticas de determinados materiales.

3
¿Qué es un Marco de Referencia? El primer paso en el estudio del movimiento es establecimiento de un marco de referencia. El mismo nos ayuda a establecer parámetros relacionados con la localización en el espacio. Por ejemplo, en la descripción del movimiento de un objeto requiere la descripción de la posición del objeto. Un marco de referencia consiste de un sistema de coordenadas que ayuda a describir la posición del objeto. Un punto en una línea, puede ser descrito con una coordenada. Un punto en un plano, se localiza con dos coordenadas y se requiere de tres coordenadas para localizar un punto en el espacio.

4
Un Marco de referencia Un sistema de coordenadas utilizado para determinar la posición de un objeto consiste de un punto fijo de referencia, llamado el origen y un conjunto de ejes con una escala apropiada. Observa la siguiente figura:

5
De la imagen anterior podemos deducir: La figura muestra la forma en que un observador en reposo ve un objeto en caída libre. Para este observador el evento es uno que ocurre de forma lineal por que tanto él como el objeto en caída libre se mueven sobre la Tierra a la misma velocidad. Mientras en la parte superior vemos un avión que se mueve a velocidad constante. Para un observador que se encuentra dentro del avión ve la trayectoria del objeto que el avión ha dejado caer como la mitad de una parábola. Esto significa que el marco de referencia depende del observador.

6
Las coordenadas se usan… Las coordenadas se usan para identificar ubicaciones sobre la superficie de la tierra Están basadas en medidas de desplazamiento desde alguna ubicación Existen dos tipos: Plano Espacial

7
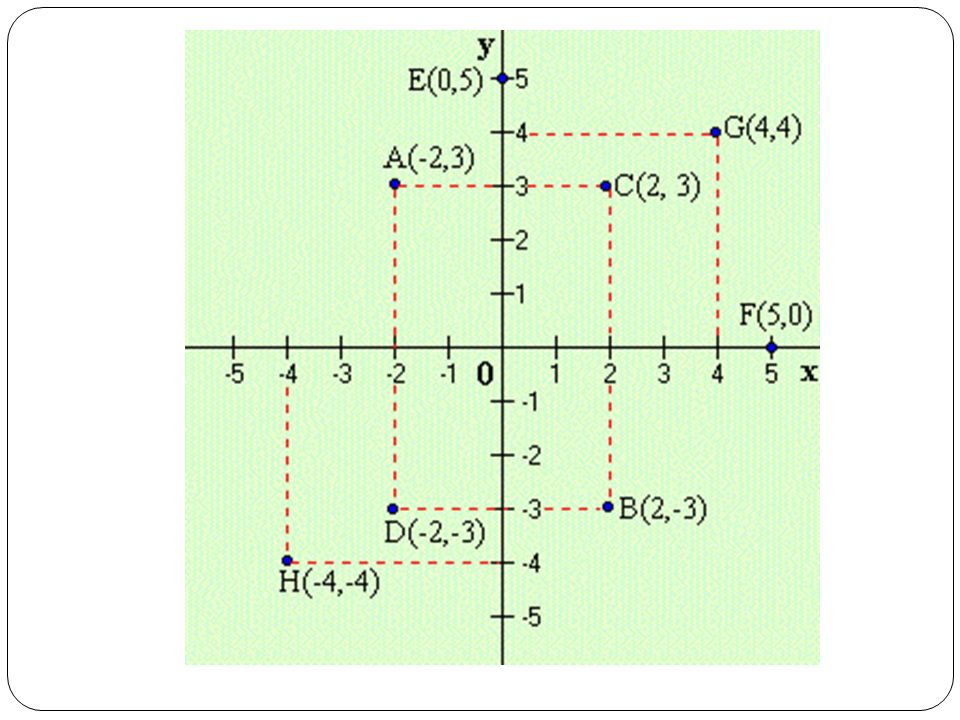
El sistema Cartesiano las coordenadas cartesianas se determinan al Ubicar un origen Trazar dos ejes a través del origen en ángulo recto Medir desplazamiento lineal desde el origen X es el este e Y el norte Las medición de distancia más típica es la Euclidiana Dado dos puntos (x 1, y 1 ) y (x 2, y 2 ) D 2 = (x 1 -x 2 ) 2 + (y 1 -y 2 ) 2 Sistema de Coordenadas Planos
 y (x 2, y 2 ) D 2 = (x 1 -x 2 ) 2 + (y 1 -y 2 ) 2 Sistema de Coordenadas Planos")
8
x y 1 234 0 1 2 3 abscisa ordenada (1,2) (4,3) N S EO Coordenadas Cartesianas Sistema de Coordenadas Planos
 (4,3) N S EO Coordenadas Cartesianas Sistema de Coordenadas Planos")
10
X Y Cuadrante ICuadrante II Cuadrante III Cuadrante IV ( +, + ) Origen
 Origen")
11
Para comenzar, considere tres ejes de coordenadas mutuamente perpendiculares (los ejes x, y, z) con sus ceros en un punto común O, llamado el origen. Aunque estas líneas se pueden orientar de cualquier forma deseada, seguiremos la costumbre de pensar en los ejes y y z como si estuvieran en el plano del papel, con sus direcciones positivas hacia la derecha y hacia arriba, respectivamente. Un sistema de coordenadas tridimensional se construye trazando un eje z, perpendicular en el origen de coordenadas a los ejes x e y. Cada punto viene determinado por tres coordenadas P(x, y, z). Sistema de Coordenadas Espacial.
. Sistema de Coordenadas Espacial..")
12
Los ejes de coordenadas determinan tres planos coordenados: xy, xz e yz. Estos planos coordenados dividen al espacio en ocho regiones llamadas octantes, en el primer octante las tres coordenadas son positivas. Sistema de Coordenadas Espacial.

13
El sistema de referencia, es un marco o un sistema de coordenadas respecto del cual describimos las posiciones y el movimiento de un cuerpo. El sistema de referencia, tal como veremos más adelante, es totalmente arbitrario. Es decir, depende del observador. Dado que en esta sección estudiaremos movimientos rectilíneos, nuestro sistema de referencia será el eje de coordenadas cartesianas X, tal como se describe e ilustra a continuación: Posición, tiempo y velocidad

14
RELATIVIDAD EN EL MOVIMIENTO

15
¿Qué es el movimiento relativo? El movimiento siempre es un concepto relativo porque debe referirse a un sistema de referencia o referencial particular escogido por el observador. Puesto que diferentes observadores pueden utilizar referenciales distintos, es importante relacionar las observaciones realizadas por aquellos. Un cuerpo puede estar en movimiento respecto de un referencial y al mismo tiempo en reposo respecto de otro

16
Ejemplos de movimientos relativos…

17
Ejercicio. Dos hormigas salen simultáneamente desde el mismo punto y caminan en línea recta a lo largo del eje (x). La primera tiene una velocidad de 2 cm/s y la segunda de 4 cm/s. ¿Cuáles serán las coordenadas de la segunda hormiga respecto de la primera después de 4 s de haber partido? ¿Existe el reposo absoluto? Explica. ¿A qué se le llama sistema inercial?
. La primera tiene una velocidad de 2 cm/s y la segunda de 4 cm/s. ¿Cuáles serán las coordenadas de la segunda hormiga respecto de la primera después de 4 s de haber partido. ¿Existe el reposo absoluto. Explica. ¿A qué se le llama sistema inercial .")
18
Adicción de velocidades Supóngase, para fines de discusión, que tenemos un tren que se está moviendo a una velocidad extraordinariamente alta, a una velocidad de V tren igual a 200 mil kilómetros por segundo. Supóngase también que en uno de los vagones del tren hay un viajero que lanza en la misma dirección en la cual se está moviendo el tren una pelota a una velocidad V pelota de 200 mil kilómetros por segundo:

19
Adicción de velocidades. La pregunta que nos hacemos ahora es: ¿a qué velocidad verá moverse la pelota un observador situado fuera del tren a un lado de las vías de ferrocarril? Si pensáramos de acuerdo a la cinemática clásica, diríamos: A la velocidad V pelota a la que es lanzada la pelota dentro del vagón del tren hay que sumarle la velocidad V tren a la cual se está desplazando el ferrocarril en el mismo sentido para obtener la velocidad total V total con la cual verá moverse la pelota un observador externo situado a un lado de las vías del ferrocarril, o sea: V total = V tren + V pelota

20
Velocidad relativa. La velocidad relativa de una partícula respecto de otra es igual a la diferencia vectorial de sus velocidades con respecto a un mismo referencial.

21
Ejemplo de velocidad relativa Analicemos el movimiento relativo de dos partículas A y B que se mueven en el espacio respecto del mismo referencial y sean r A y r B sus vectores de posición respecto de su origen de coordenadas O. Las velocidades de A y B medidas en ese referencial serán:

22
Supongamos que deseamos saber cuál es la velocidad de la partícula B respecto de un observador situado sobre A, es decir la velocidad relativa de B respecto de A. Para esto el vector posición (relativo) de la partícula B respecto de A está definido por Derivando esta expresión respecto del tiempo tenemos: Ejemplo de velocidad relativa
 de la partícula B respecto de A está definido por Derivando esta expresión respecto del tiempo tenemos: Ejemplo de velocidad relativa.")
23
Fuerzas restauradoras. R: fuerza contraria y que depende de la elasticidad del material, ya que tiende a restaurar la forma del objeto o material deformado.

24
Ley de Hooke. El físico Inglés Robert Hooke (1635-1703), publicó en 1678 un estudio en el que llegó a una conclusión muy similar a la que obtuvimos en nuestra investigación científica, Hooke no solo concluyó que la fuerza aplicada sobre el resorte era directamente proporcional a la elongación, sino que modeló matemáticamente esta situación.
, publicó en 1678 un estudio en el que llegó a una conclusión muy similar a la que obtuvimos en nuestra investigación científica, Hooke no solo concluyó que la fuerza aplicada sobre el resorte era directamente proporcional a la elongación, sino que modeló matemáticamente esta situación..")
25
Fuerza sobre el resorte Fuerza opuesta a la del resorte

26
Aplicaciones de la ley de Hooke. DINANÓMETRO: instrumento utilizado para medir fuerzas o para pesar objetos. El dinamómetro tradicional, inventado por Isaac Newton, basa su funcionamiento en la elongación de un resorte que sigue la ley de Hooke en el rango de medición.

27
RESORTE DE TORSIÓN: Un resorte de torsión es un resorte que trabaja a torsión o girando, eso es, mediante la elasticidad es capaz de almacenar energía mecánica cuando es girado y puede devolverla cuando se libera en forma de giro. La cantidad de fuerza que libera es proporcional a la cantidad total que sea girado. Aplicaciones de la ley de Hooke.

28
RESORTE DE COMPRESION: Se conoce como resorte o muelle a un operador elástico capaz de almacenar energía y desprenderse de ella sin sufrir deformación permanente cuando cesan las fuerzas o la tensión a las que es sometido. Aplicaciones de la ley de Hooke.

29
Mecánica de los cuerpos macroscópicos Movimiento mecánico

30
Cinemática: Rama de la Mecánica que se dedica a la descripción del movimiento mecánico sin interesarse por las causas que lo provocan. Dinámica: Rama de la Mecánica que se dedica a investigar las causas que provocan el movimiento mecánico.

31
Movimiento Mecánico: Cambio de posición de un cuerpo respecto a otros, tomados como referencia. Carácter: Relativo Definir sistema bajo estudio Definir Sistema de Referencia (SR)
.")
32
SR : Cuerpos que se toman como referencia para describir el movimiento del sistema bajo estudio. Bases para el estudio del movimiento mecánico x(t)y(t)z(t) Se le asocia Observador Observador Sistema de Coordenadas Sistema de Coordenadas y x z Reloj Reloj
y(t)z(t) Se le asocia Observador Observador Sistema de Coordenadas Sistema de Coordenadas y x z Reloj Reloj.")
Presentaciones similares



>")







 a una magnitud vectorial, obtenida como producto.>")





>")

