Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Tarjeta principal y módulos de control para un robot móvil Presenta: Sonia Martínez Guzmán Marisela Morales Matus Marlene Pérez Cruz 19-enero-2015

2
Tarjeta de control Modulo de control puente H Modulo de control infrarrojo Modulo de control ultrasónico

4
1 L298N (circuito integrado puente H) 1 LM7805 8 Diodos 1n4148 2 Capacitor de 2200uf 1 Capacitor de 0.33uf 1 Capacitor de 0.01uf
 1 LM Diodos 1n Capacitor de 2200uf 1 Capacitor de 0.33uf 1 Capacitor de 0.01uf")
5
Es un circuito electrónico que permite controlar el giro de un motor de corriente continua: el motor gira en el sentido de las agujas de un reloj o en el sentido contrario a las mismas. Con un arduino solo se necesita tres pines para controlar el motor: - 1ro en high mueve el motor en una dirección - 2do en high mueve el motor en la dirección contraria - 3ro nos permitirá controlar la velocidad, con PWM

7
Este módulo basado en el chip L298N te permite controlar dos motores de corriente continua o un motor paso a paso bipolar de hasta 2 amperios. El módulo cuenta con todos los componentes necesarios para funcionar sin necesidad de elementos adicionales, entre ellos diodos de protección y un regulador LM7805 que suministra 5V a la parte lógica del integrado L298N. Cuenta con jumpers de selección para habilitar cada una de las salidas del módulo (A y B). La salida A esta conformada por OUT1 y OUT2 y la salida B por OUT3 y OUT4. Los pines de habilitación son ENA y ENB respectivamente.
. La salida A esta conformada por OUT1 y OUT2 y la salida B por OUT3 y OUT4. Los pines de habilitación son ENA y ENB respectivamente..")
9
Este sensor consta de tres patas: alimentación, tierra y salida. La tensión en esta última variará entre 0,3 y 3,1 voltios en función de la distancia medida. Rojo: alimentación Negro: tierra Amarillo: salida

15
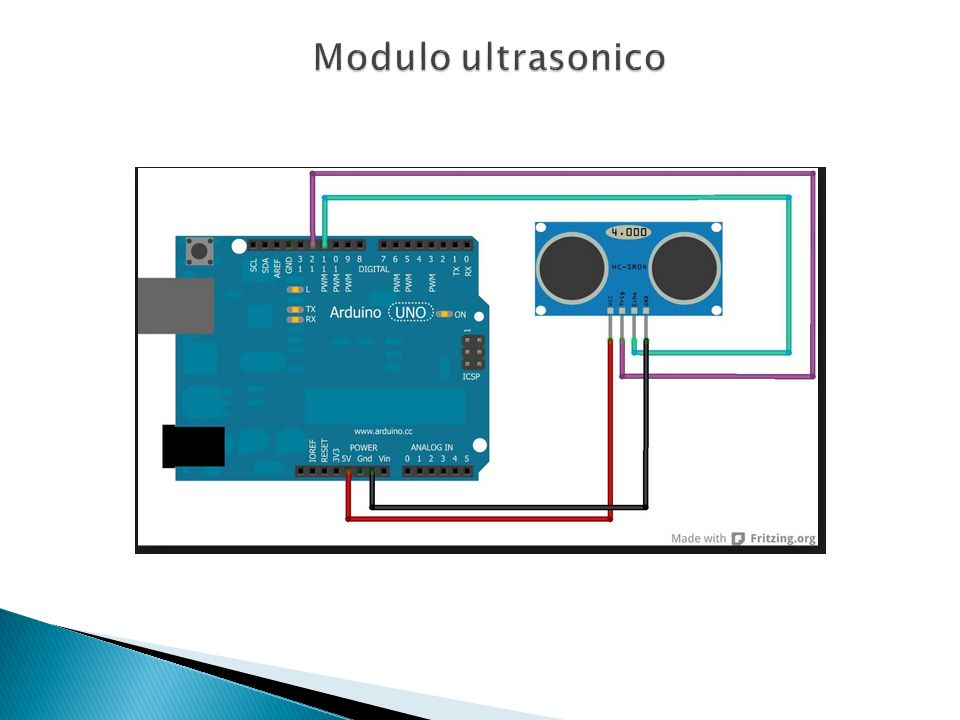
SENSOR ULTRASONICO. E s una onda acústica o sonora cuya frecuencia está por encima del espectro audible al oìdo humano. Aproximadamente 20.000 hz. Es un sensor para medir distancias o superar obstáculos. Tiene un rango de distancias sensible entre 3cm y 3 cm con una precisión de 3mm

16
Contiene un emisor y un receptor de ondas de ultrasonidos y funciona de modo de sonar, de tal forma que el emisor lanza un tren de pulsos ultrasónico de 40 hz y el receptor espera el eco de dicho tren de pulsos en algún objeto. El sensor recibe el tiempo que transcurre entre el envió y la recepción del ultrasonido.

Presentaciones similares





















)) como lo denomina el fabricante) tiene una interfaz.>")
 El capacitor Ce para lograr una frecuencia.>")



 esta instalado en el cuerpo de la mariposa del motor y controla la relación de aire en la admisión al motor.>")

