Descargar la presentación
La descarga está en progreso. Por favor, espere

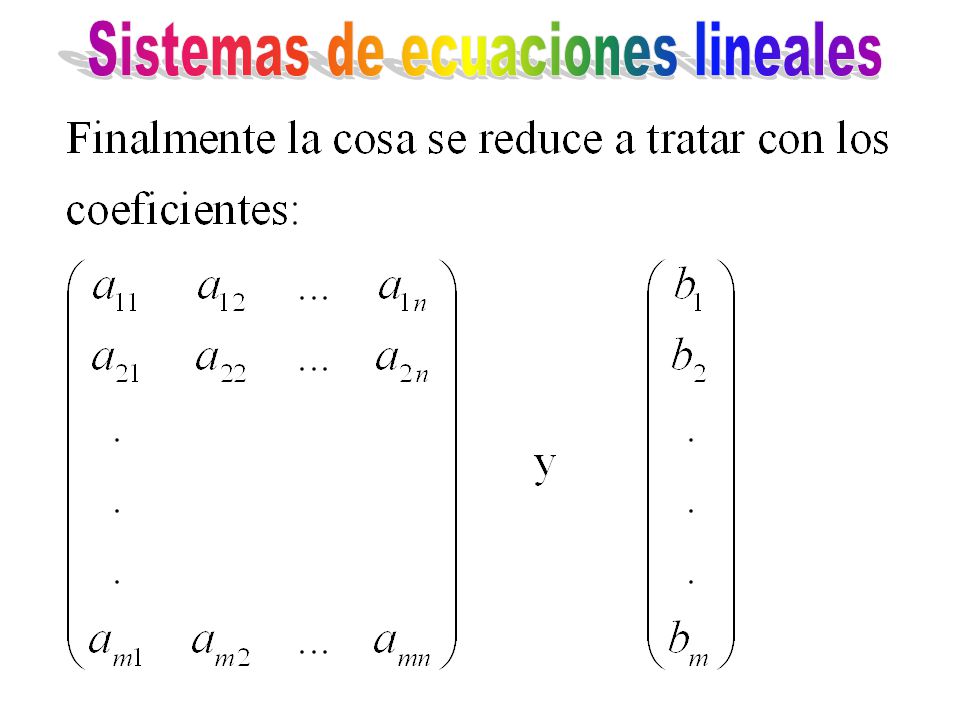
1
Primera clase Martes 14 de septiembre del 2010 De 12:00 a 13:30 horas

3
Linear algebra with applications. Third Edition W. Keith Nicholson PWS Publishing company

4
Linear algebra. Lang Linear algebra. Jim Hefferon Linear algebra. Hoffman y Kunze Calculus. Apostol Applied mathematics. Olver y Shakiban Calculus of vector functions. Williamson, Crowell y Trotter Mathematics for physicists. Dennery y Krzywicki Mathematical methods in physics and engineering. Dettman Mathematical methods for physicists. Arfken

5
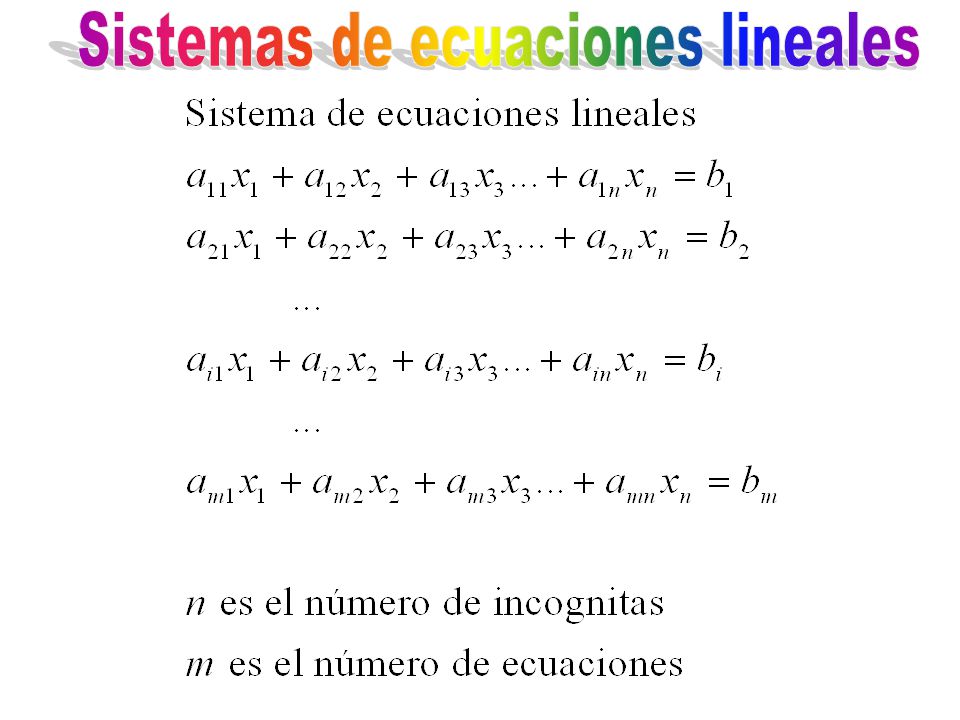
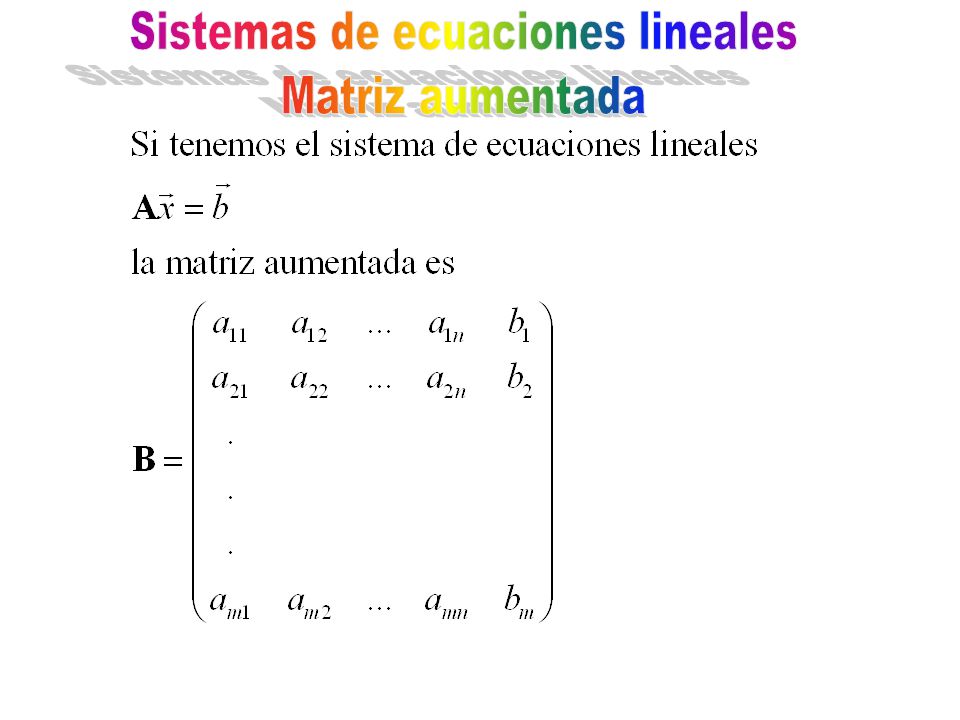
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

6
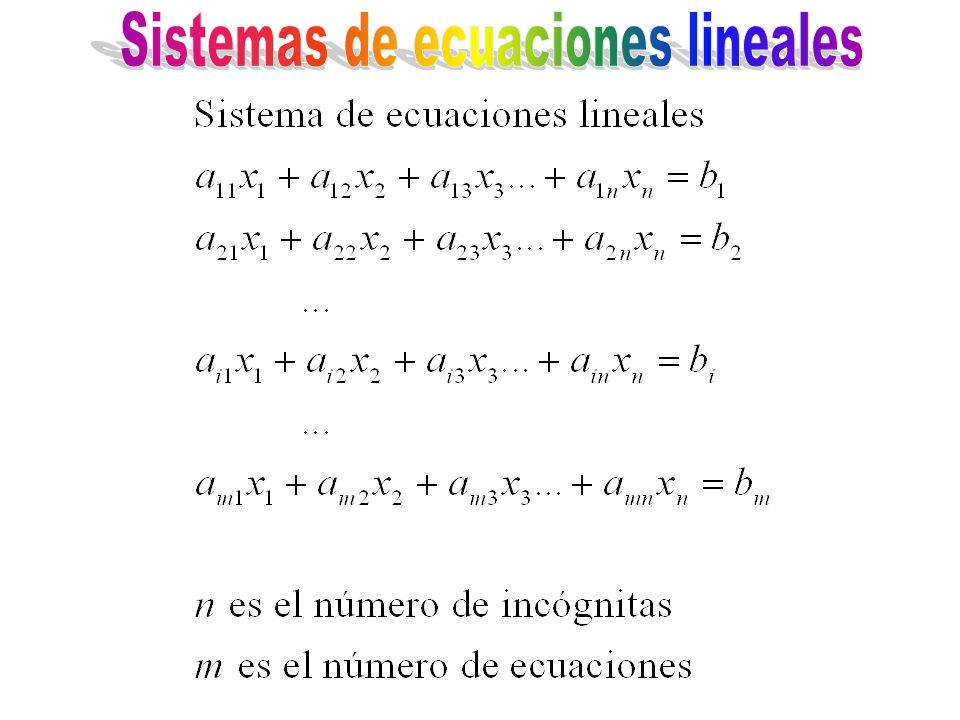
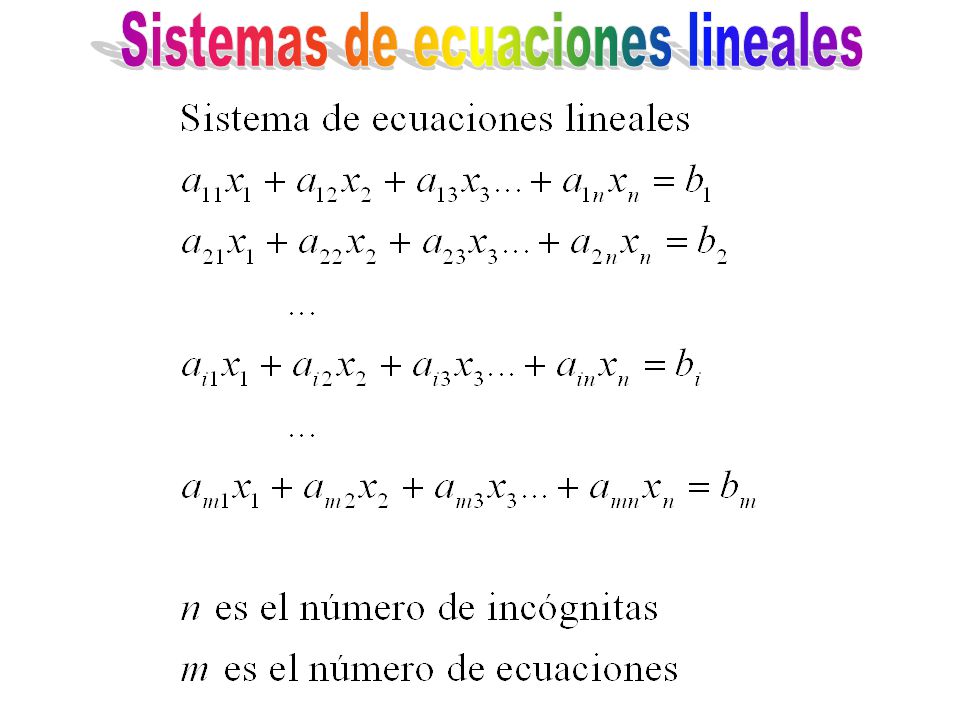
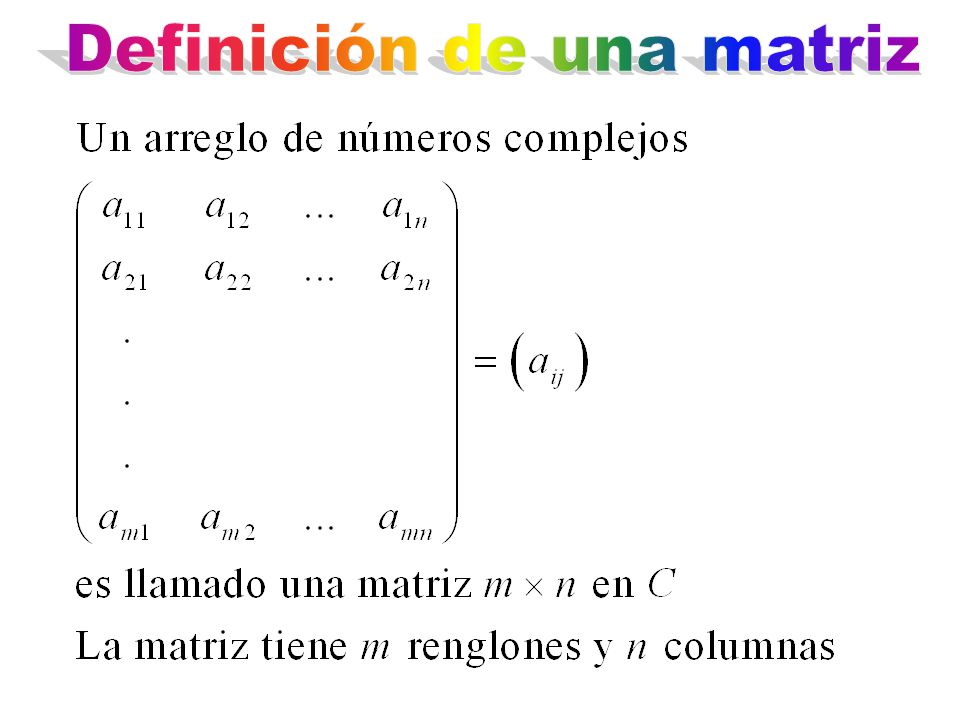
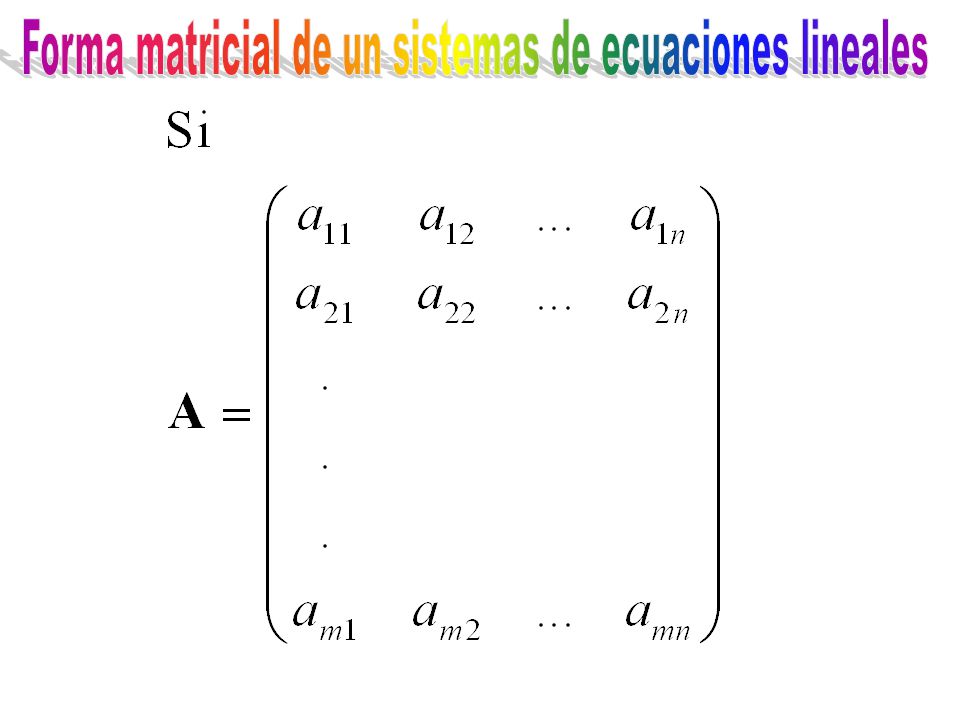
El Álgebra lineal es la rama de las matemáticas que estudia los sistemas de ecuaciones lineales, los vectores, los espacios vectoriales, y las transformaciones lineales entre los espacios vectoriales.

7
Los espacios vectoriales son fundamentales en las matemáticas modernas; el Álgebra lineal es ampliamente utilizada tanto en el álgebra abstracta como en el análisis funcional. El Álgebra lineal tiene una representación concreta en la Geometría Analítica. Tiene aplicaciones importantes y vastas en las ciencias naturales y en las ciencias sociales, ya que muchos modelos no lineales pueden ser aproximados por modelos lineales.

8
La historia del Álgebra lineal moderna se remonta a los años de 1843 y 1844. En 1843, William Rowan Hamilton (quien inventó el nombre “Vector”) descubrió los cuaterniones. En 1844, Hermann Grassman publicó su libro Die lineale Ausdehnungslehre. Arthur Cayley en 1857, introdujo las matrices (2x2), una de las ideas fundamentales del Álgebra Lineal.
 descubrió los cuaterniones. En 1844, Hermann Grassman publicó su libro Die lineale Ausdehnungslehre. Arthur Cayley en 1857, introdujo las matrices (2x2), una de las ideas fundamentales del Álgebra Lineal..")
9
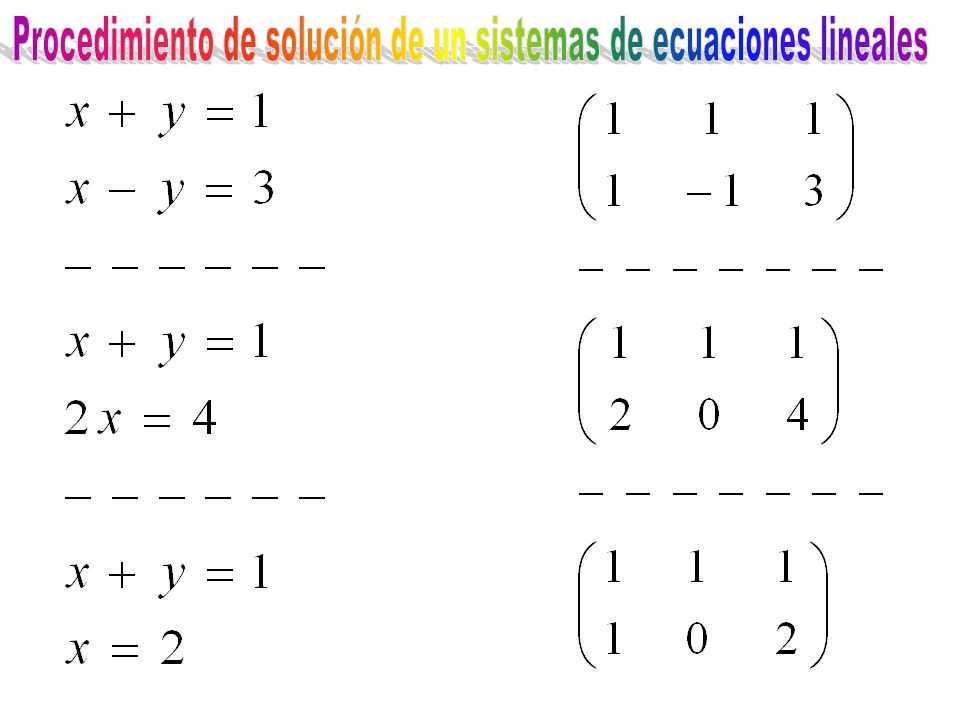
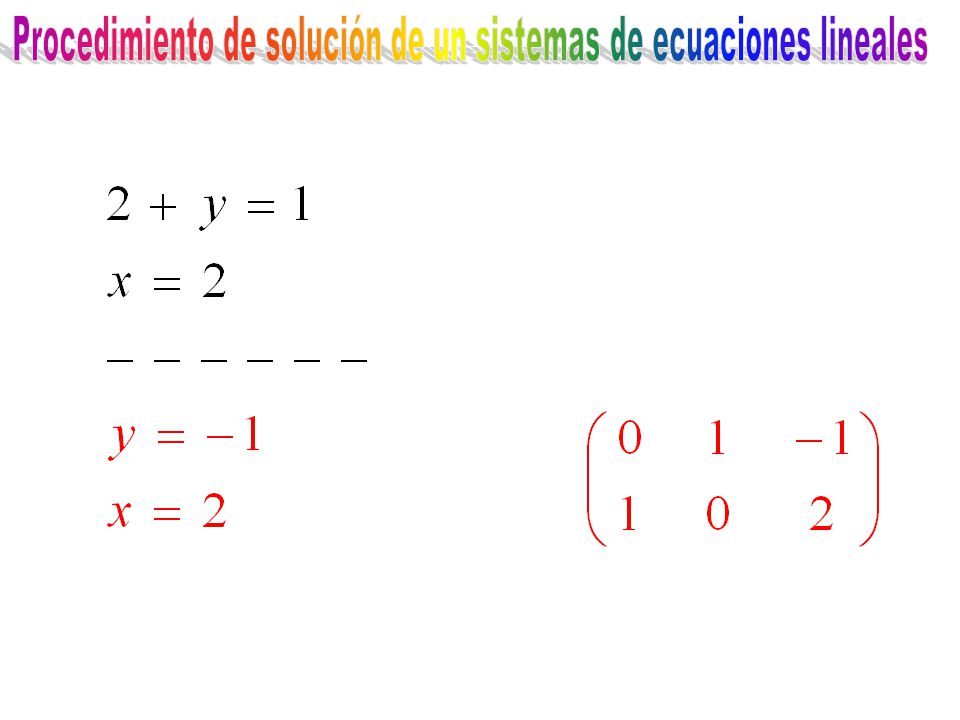
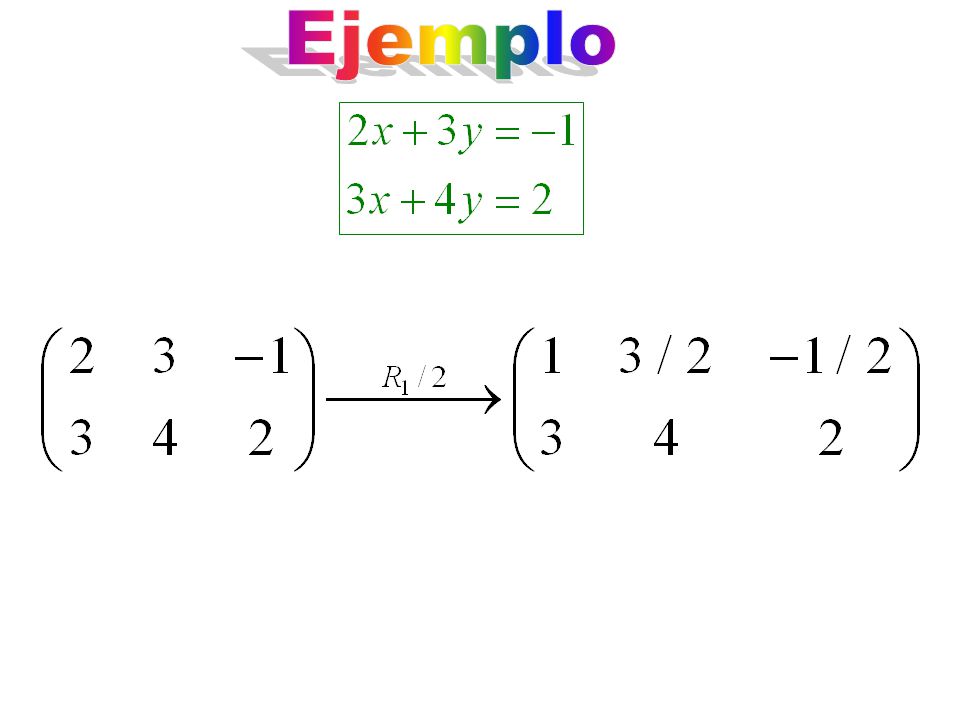
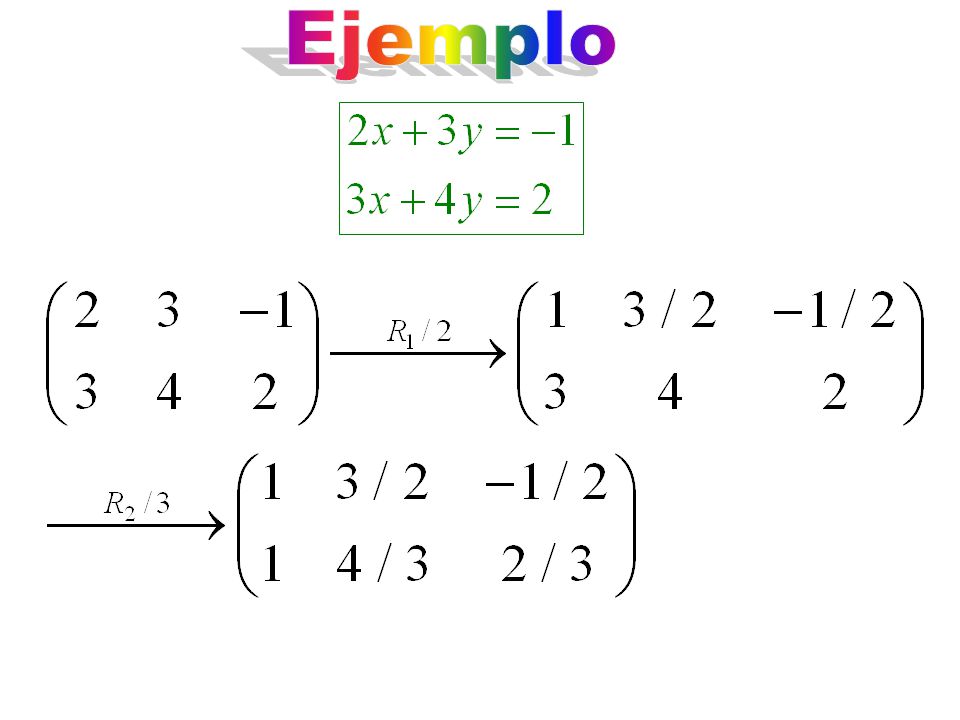
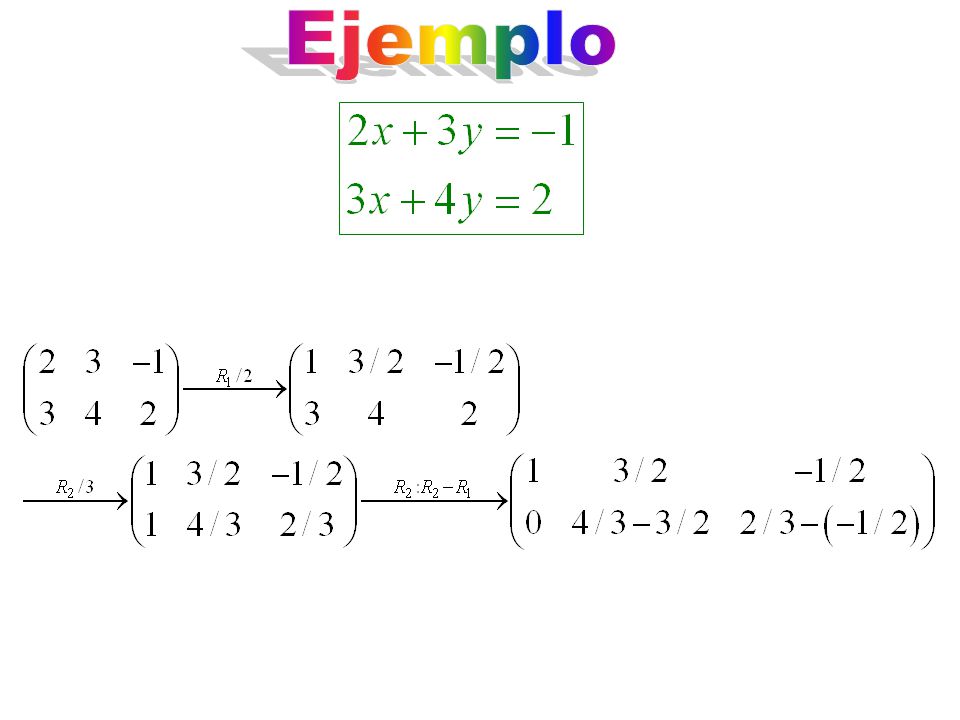
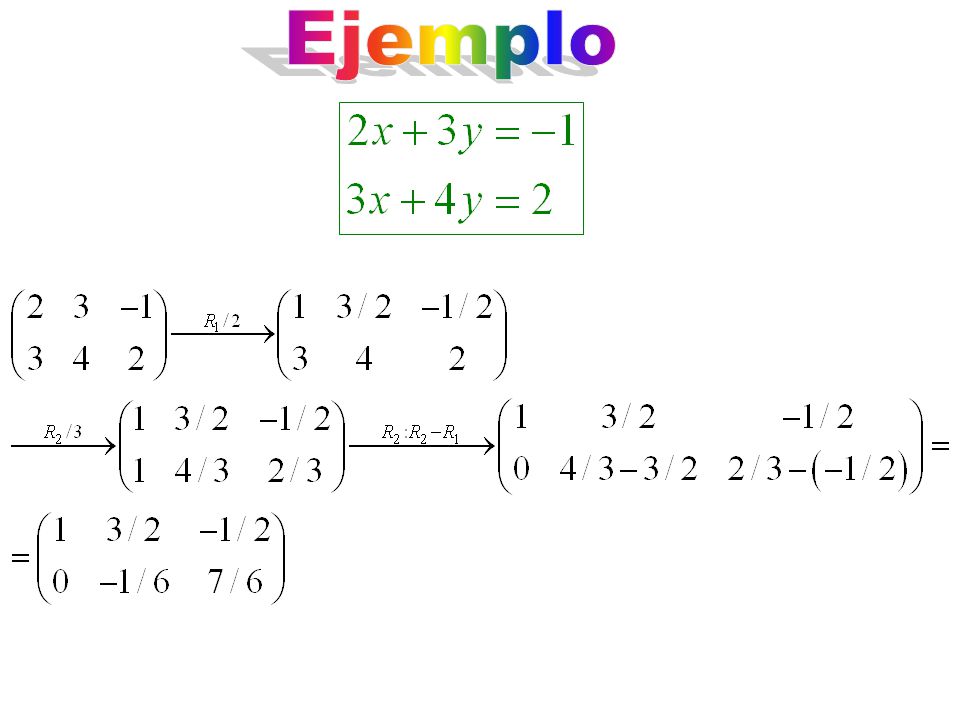
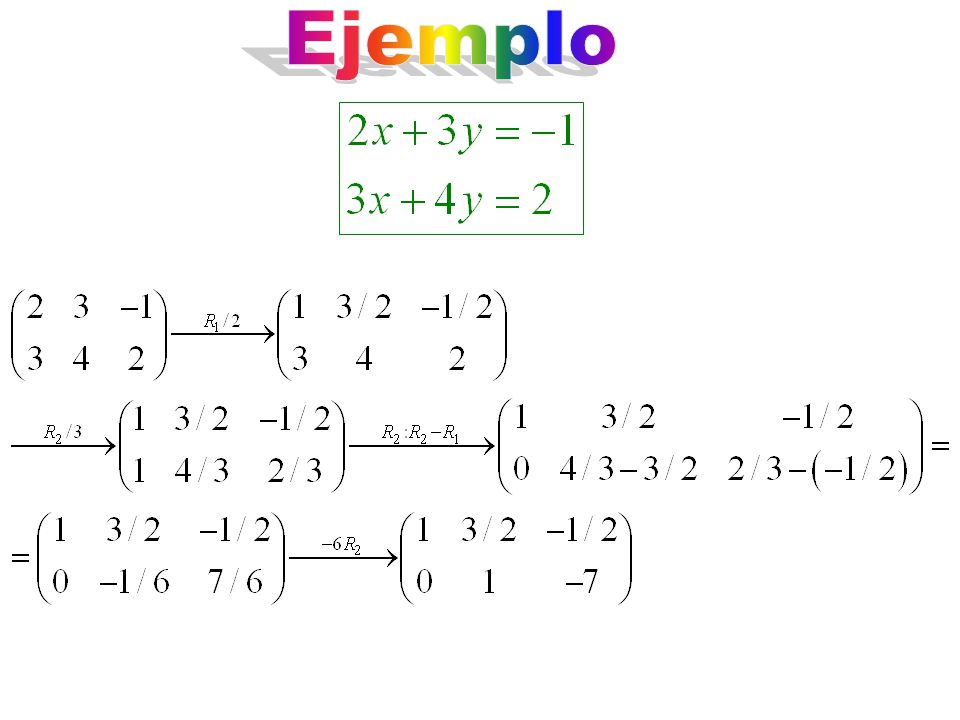
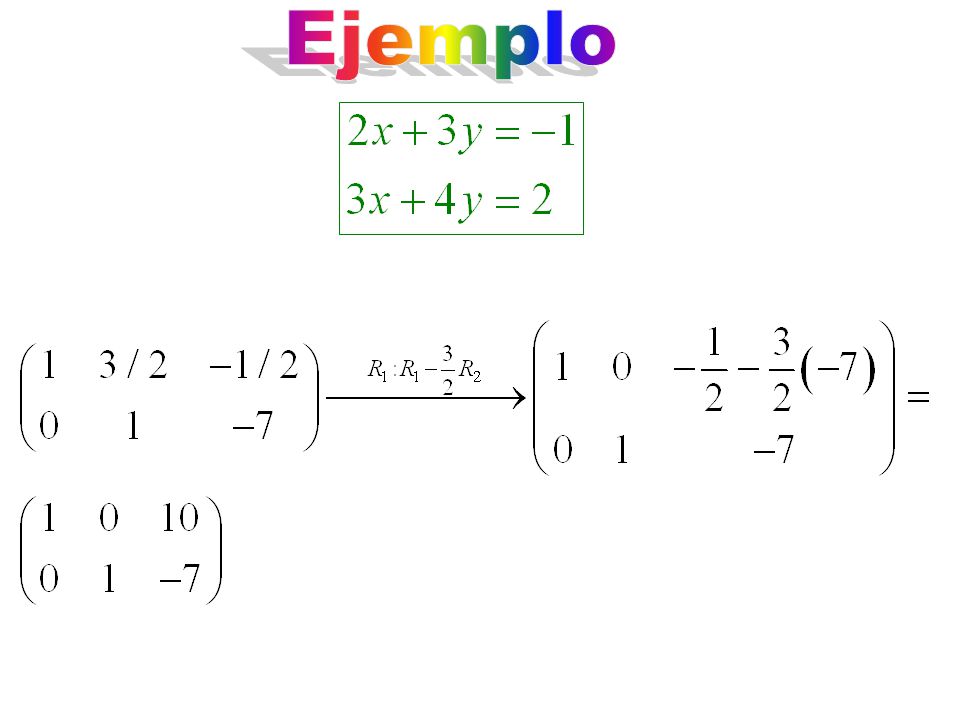
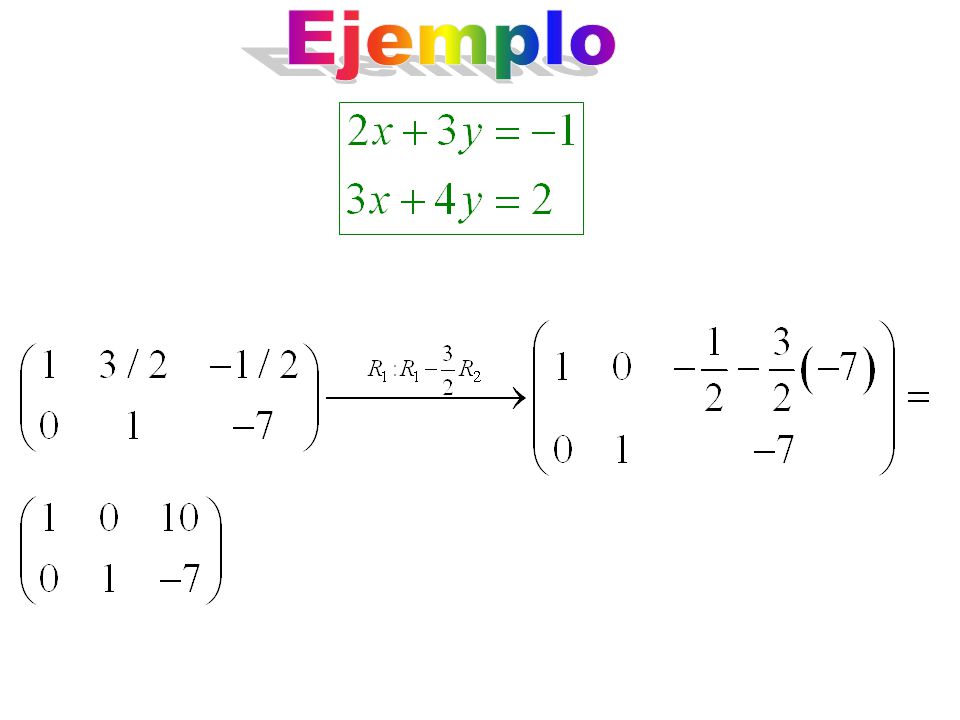
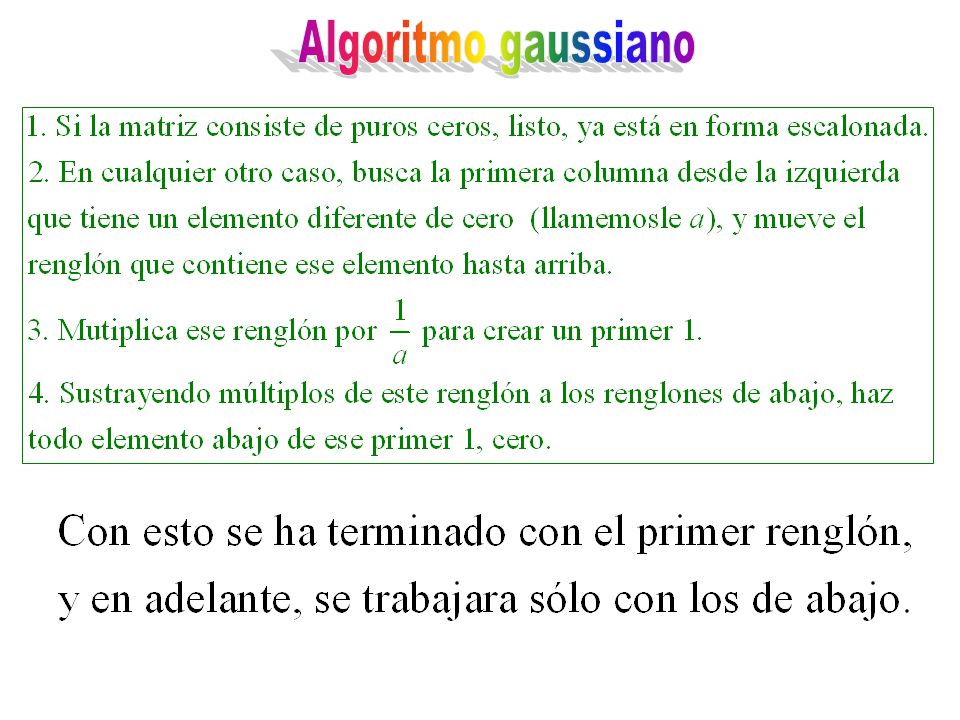
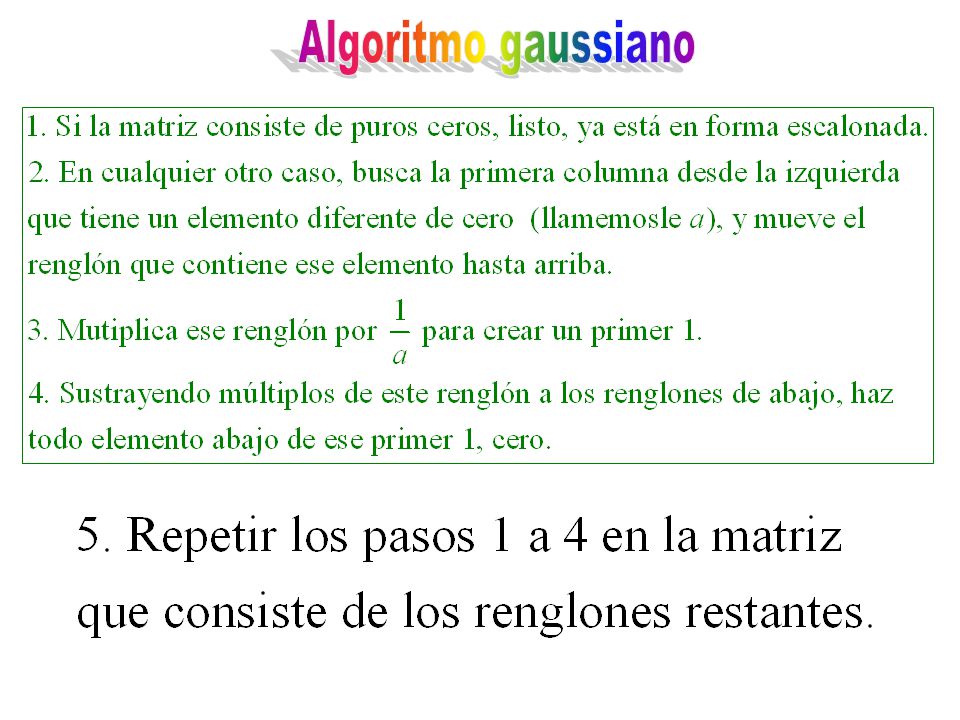
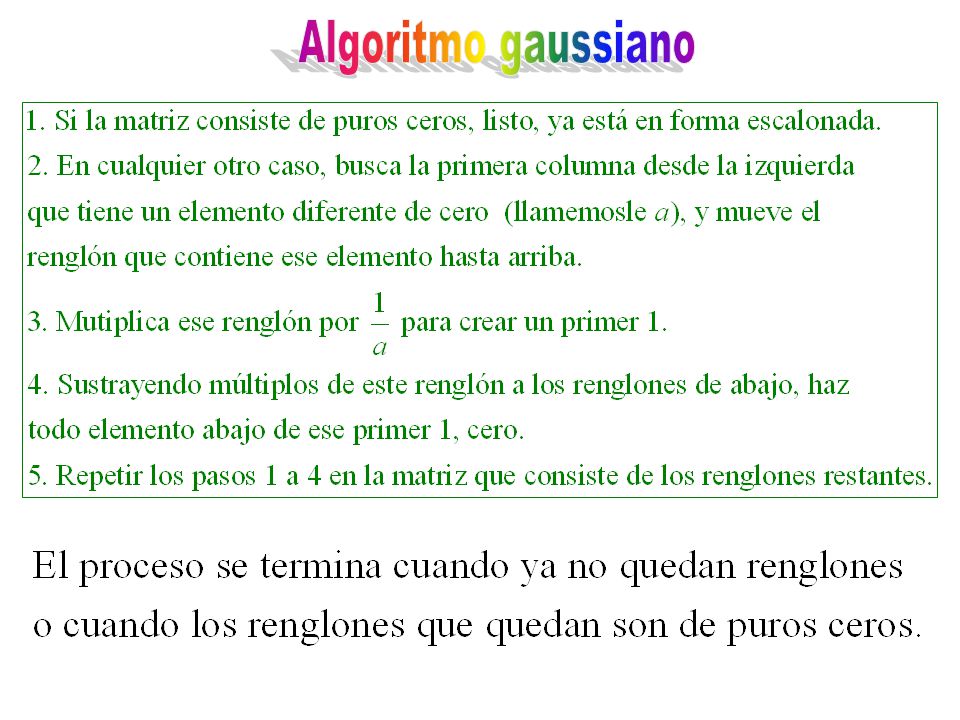
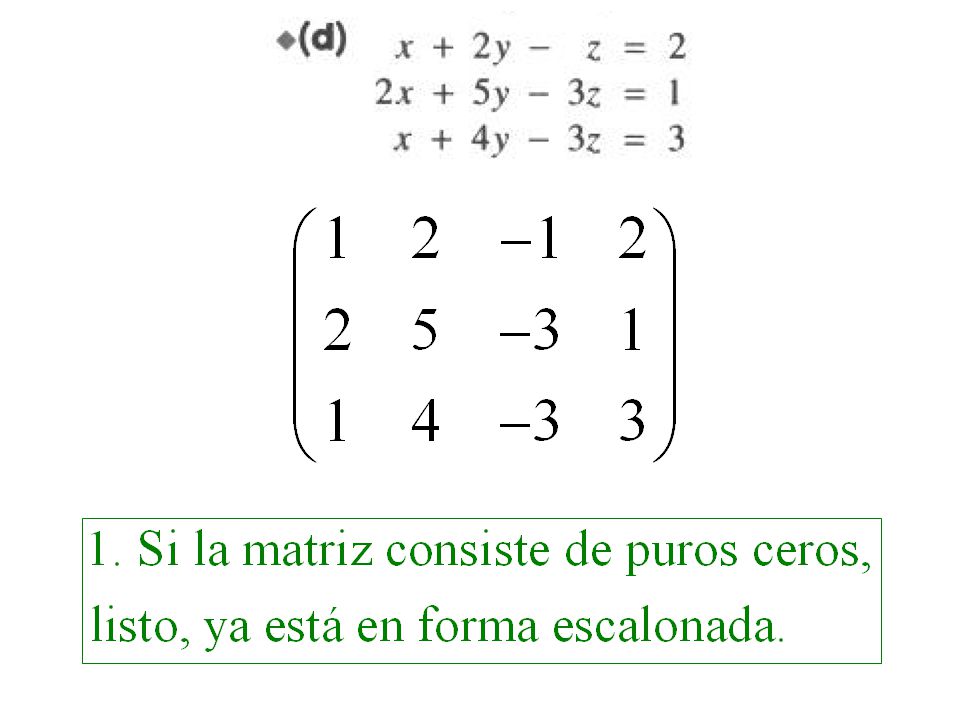
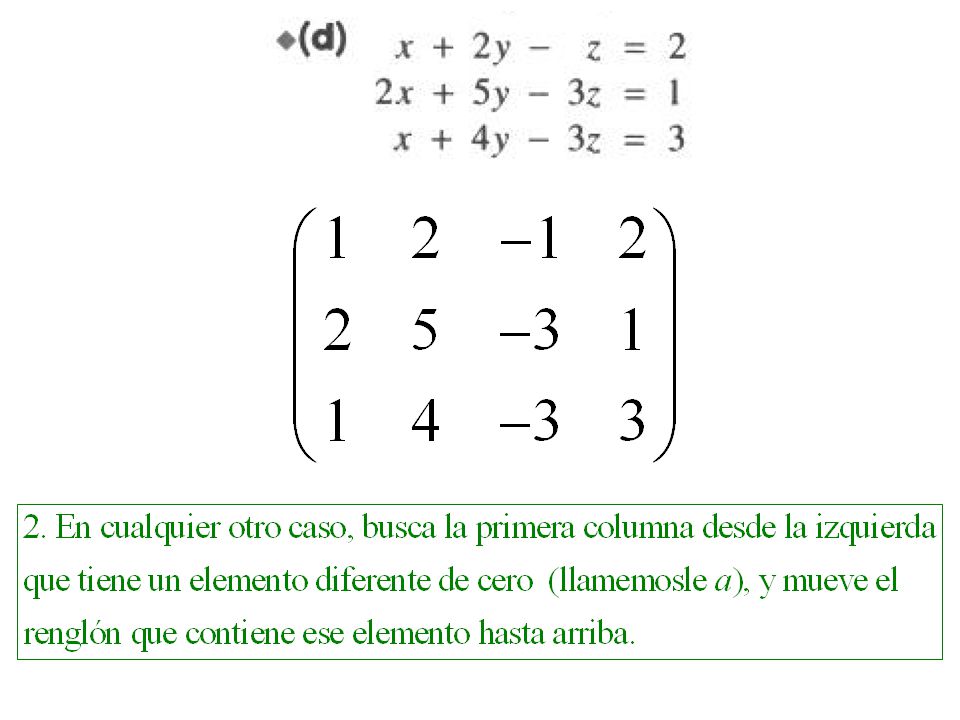
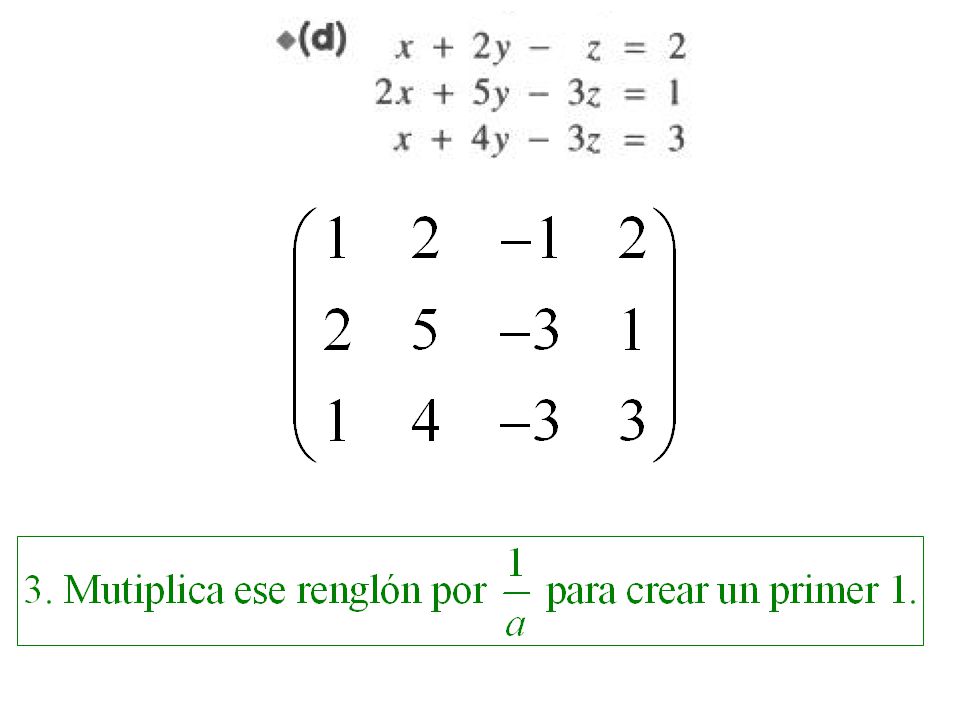
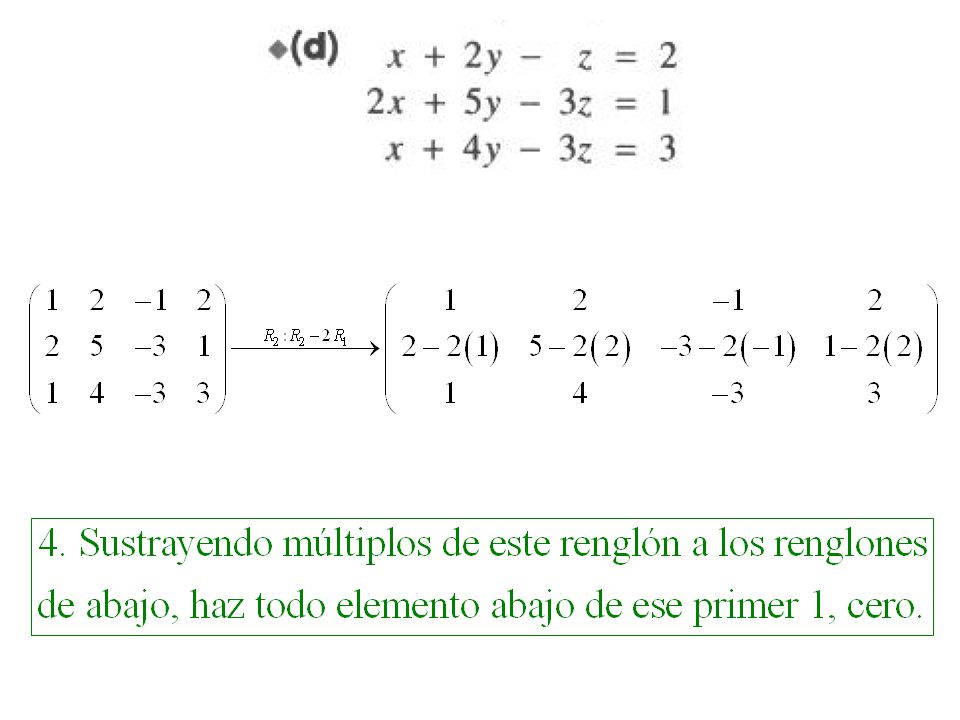
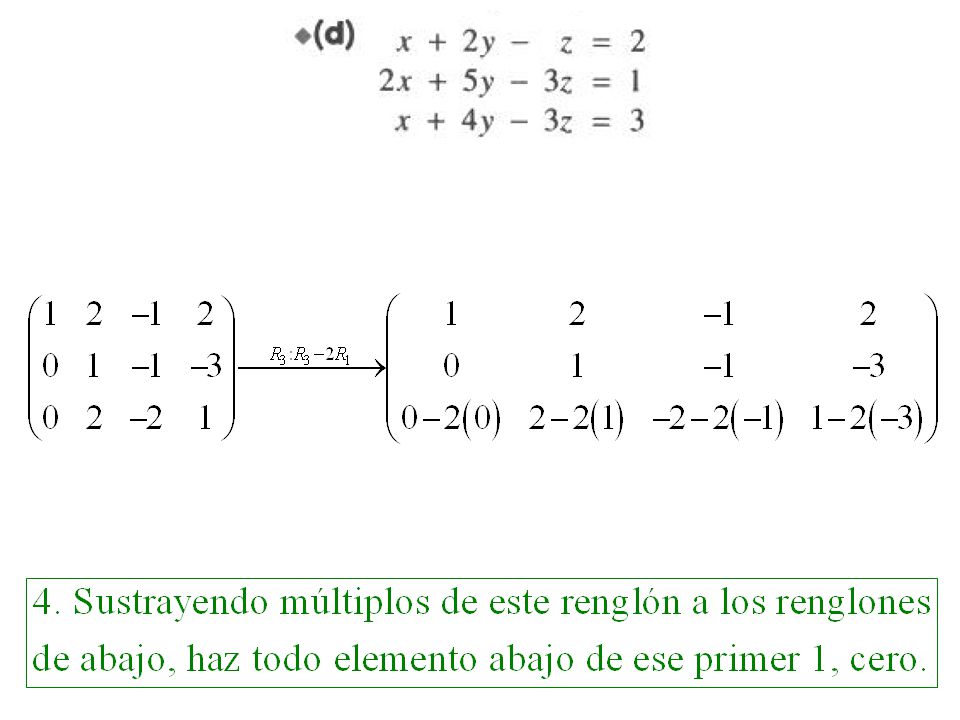
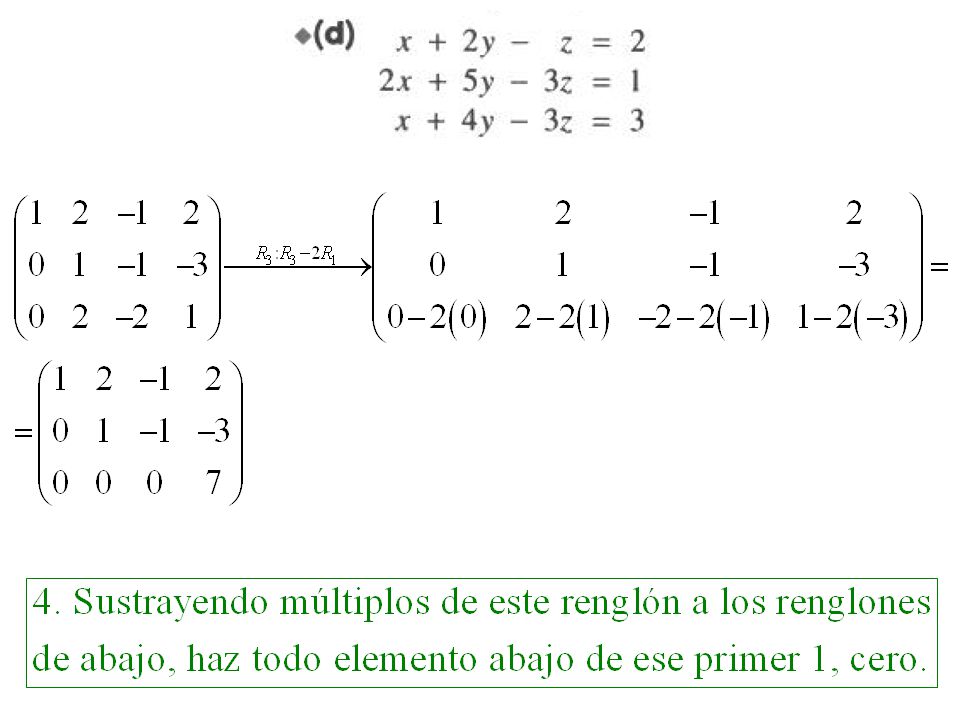
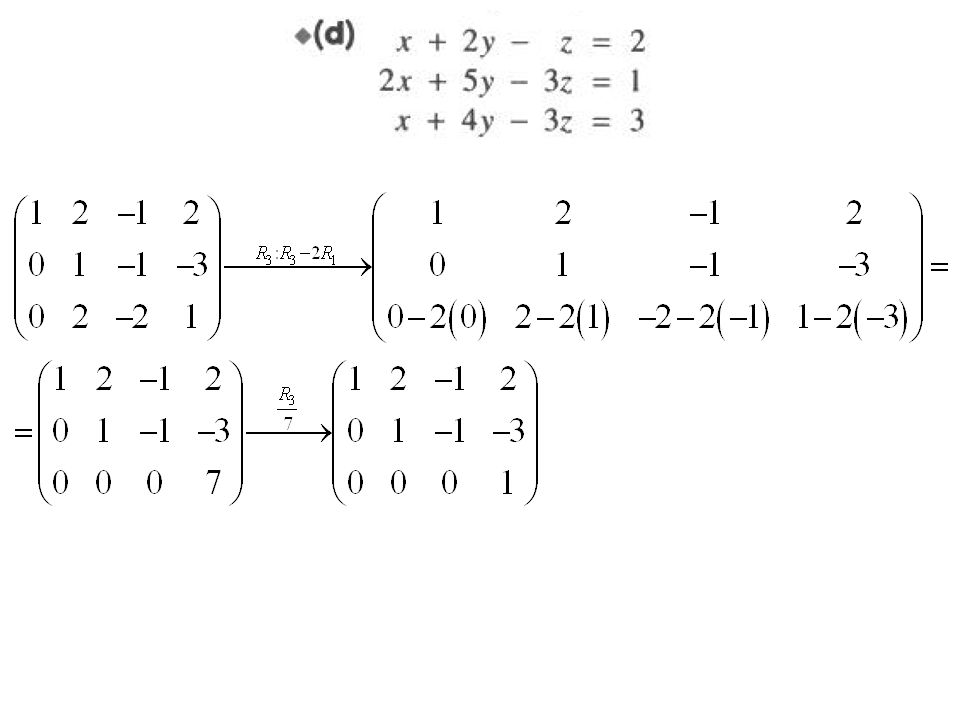
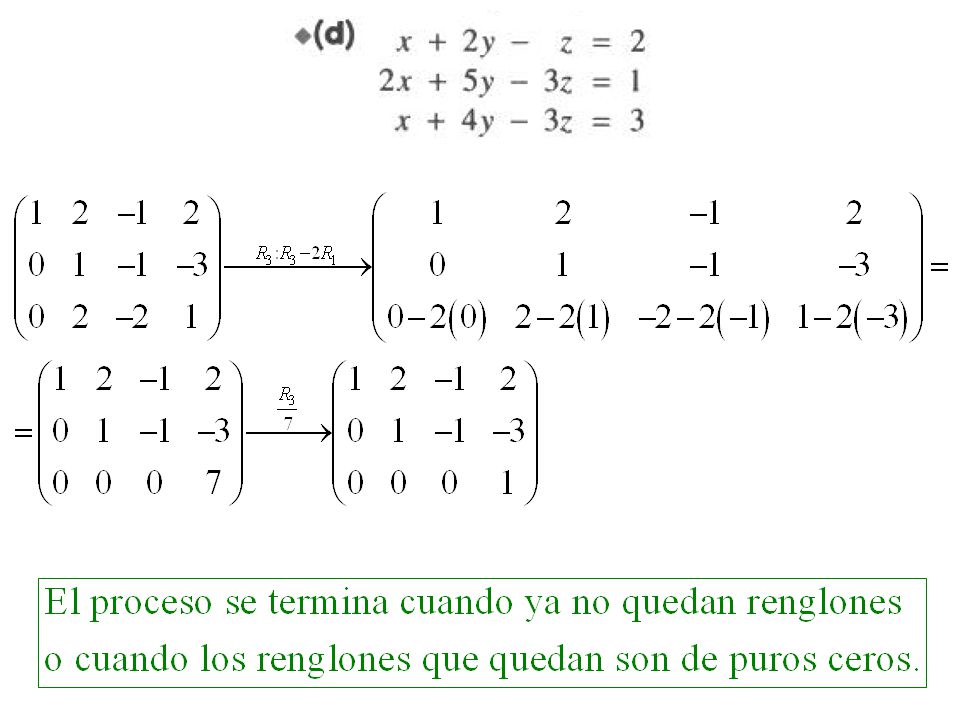
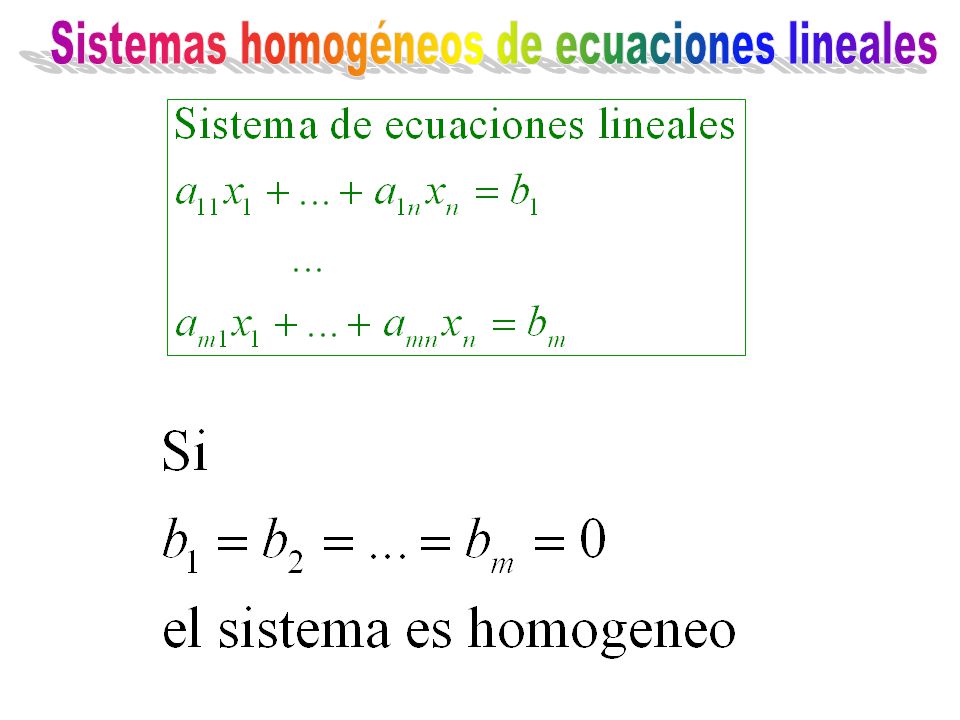
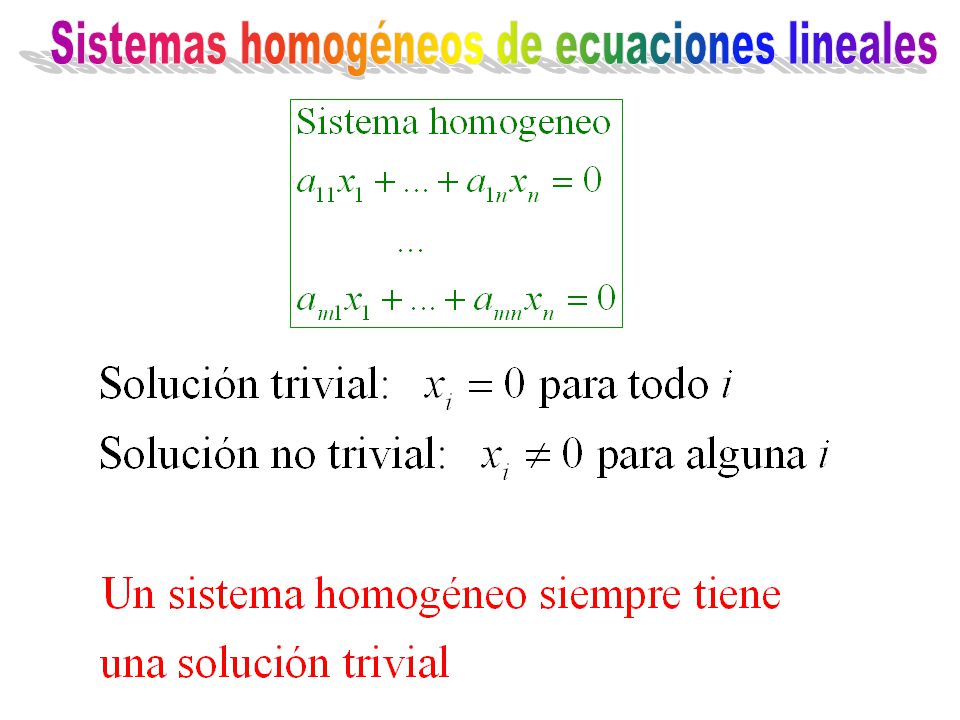
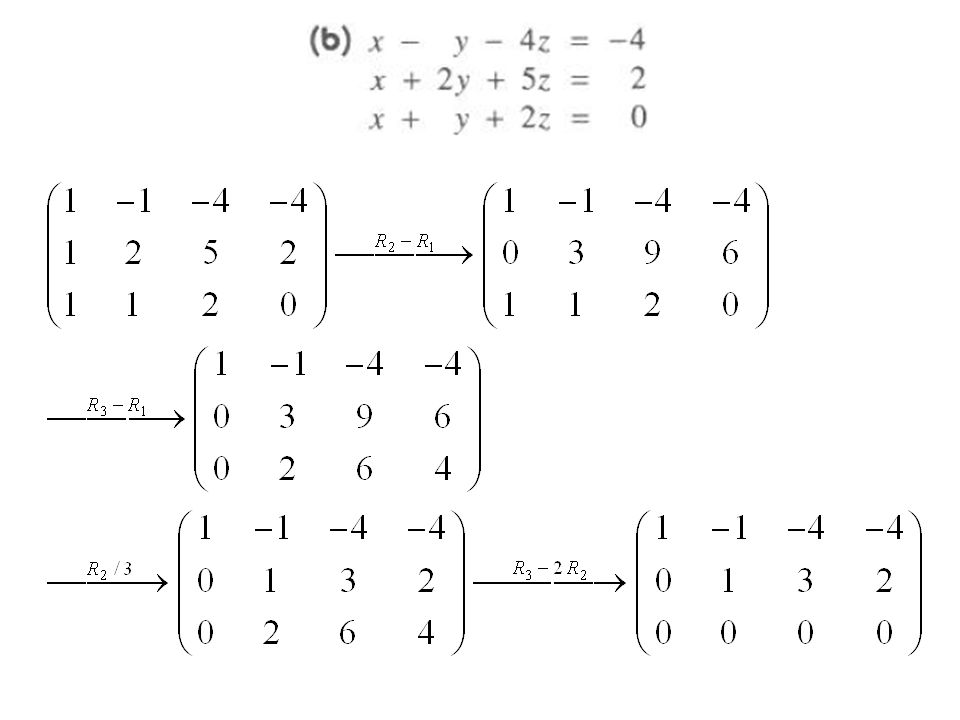
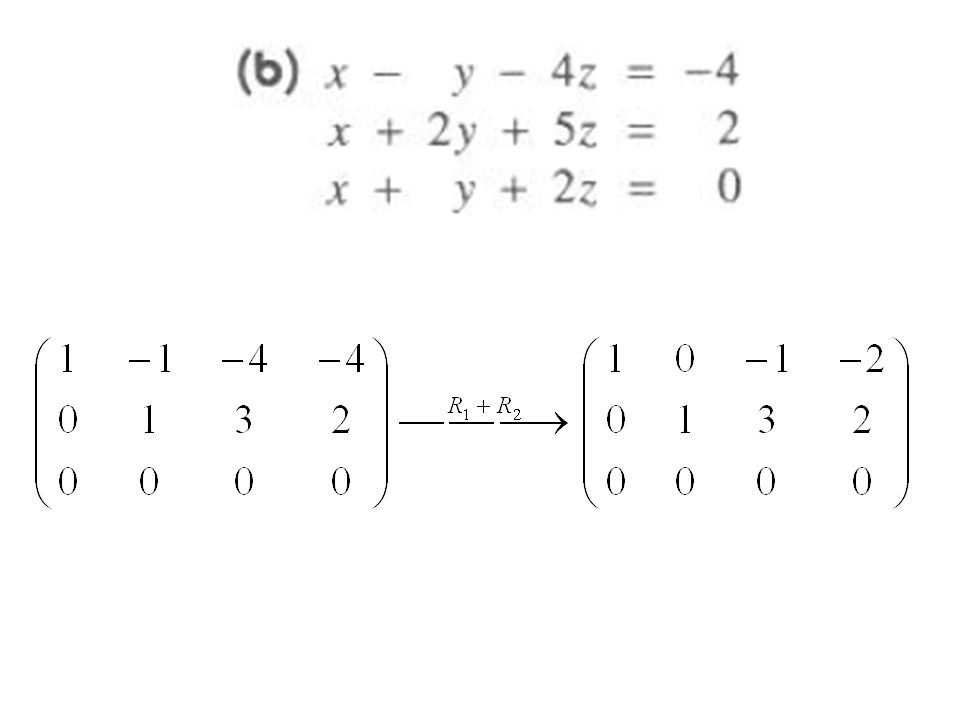
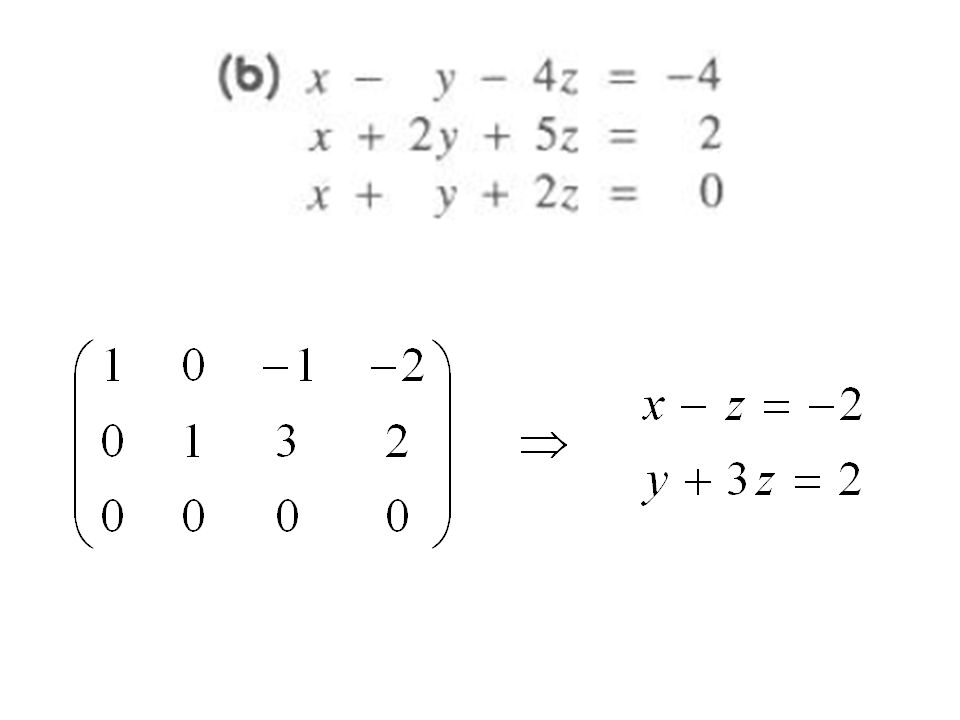
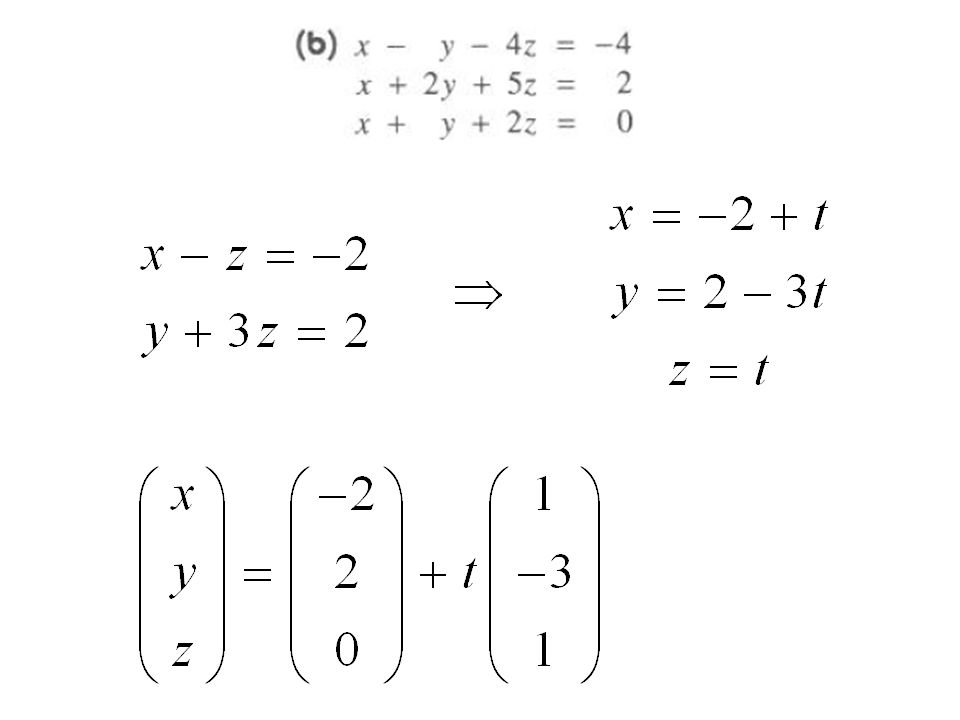
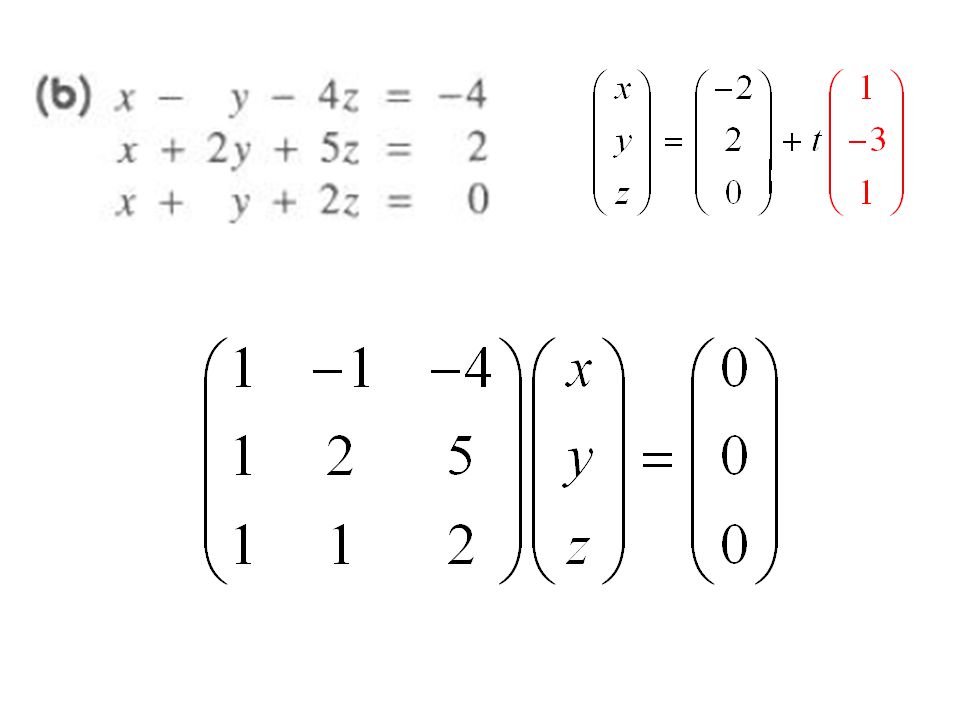
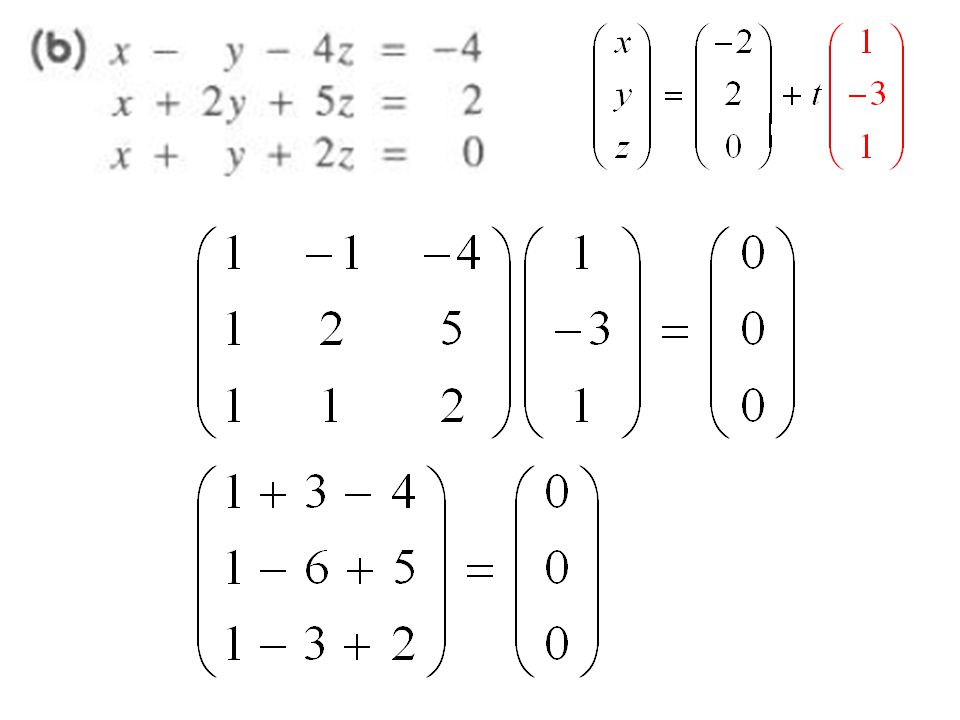
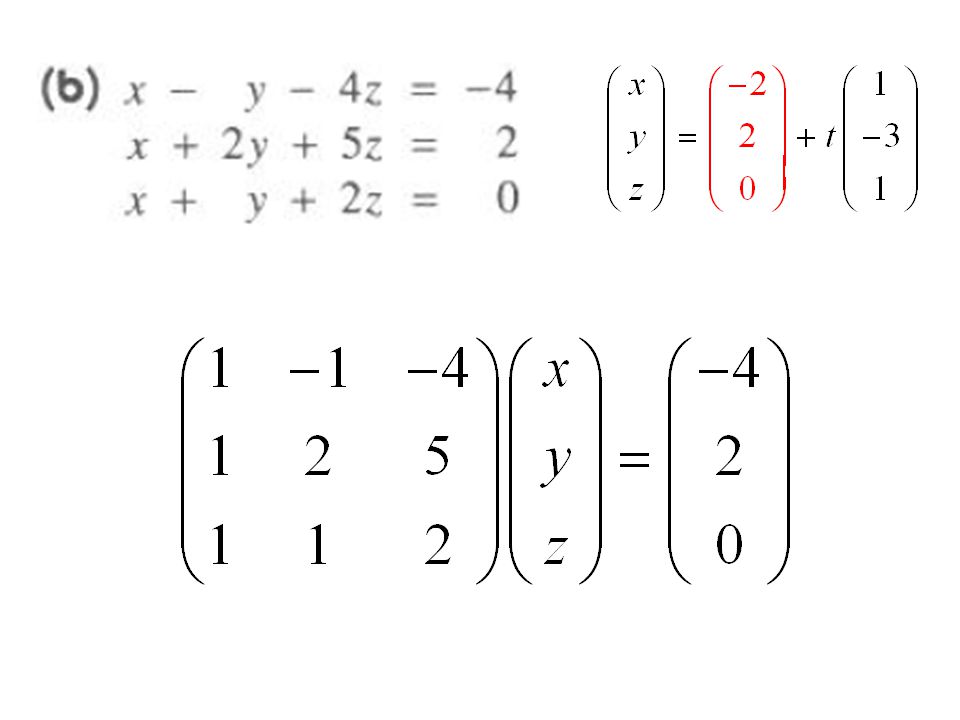
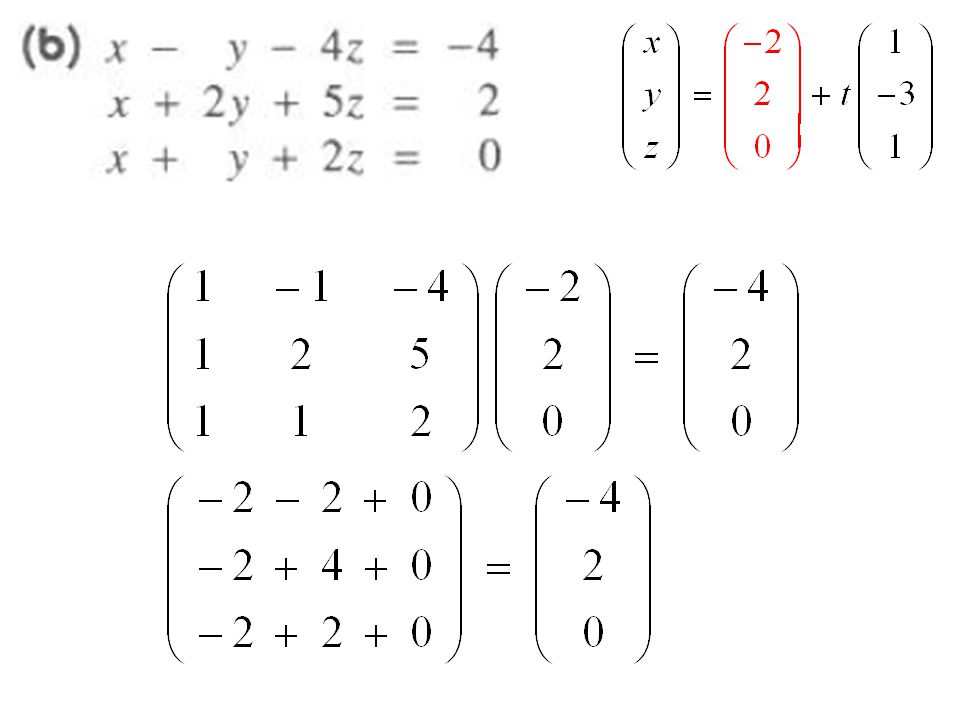
1.Soluciones y operaciones elementales 2.Eliminación gaussiana 3.Ecuaciones homogéneas

34
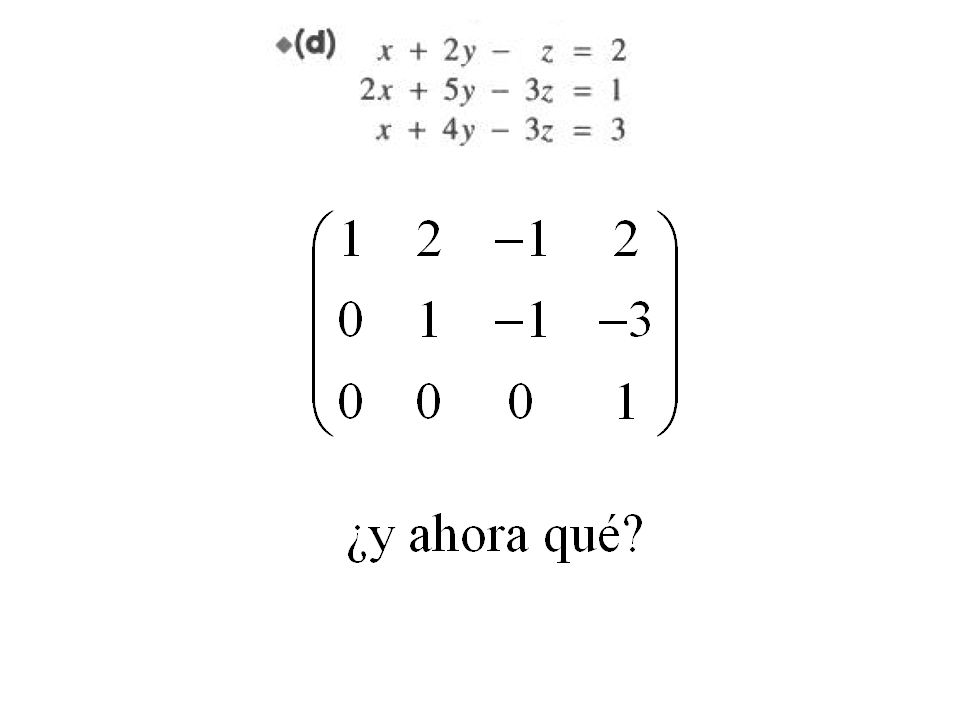
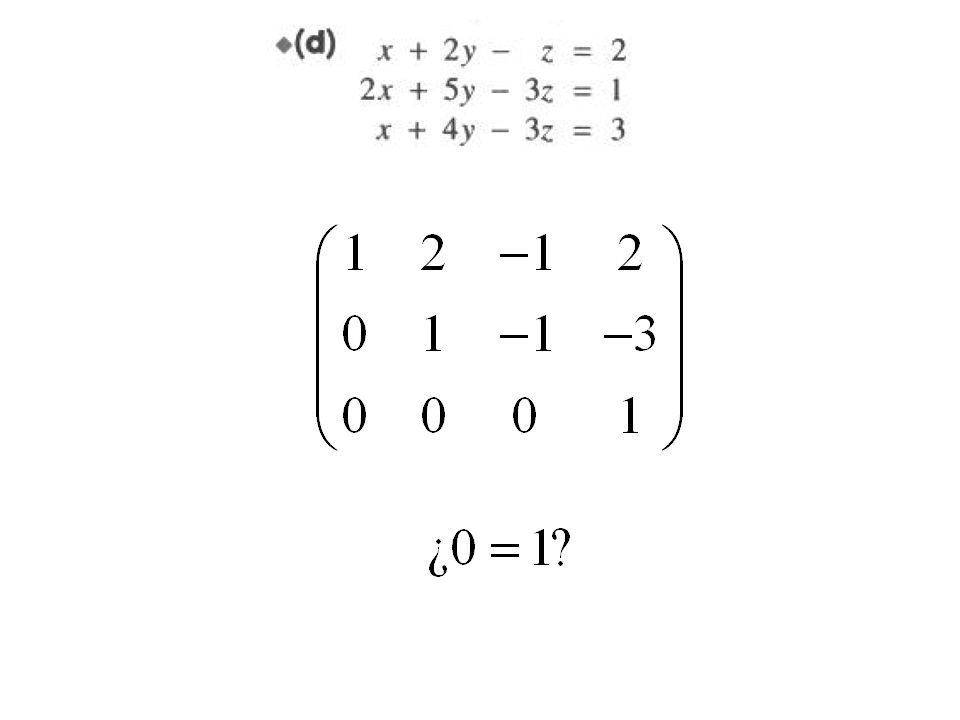
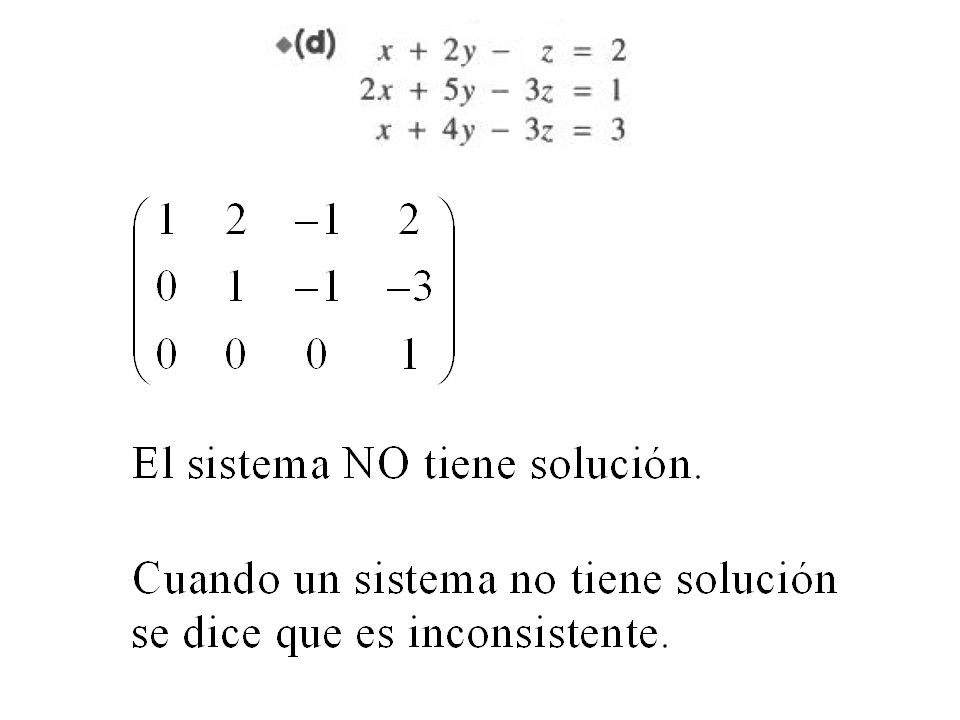
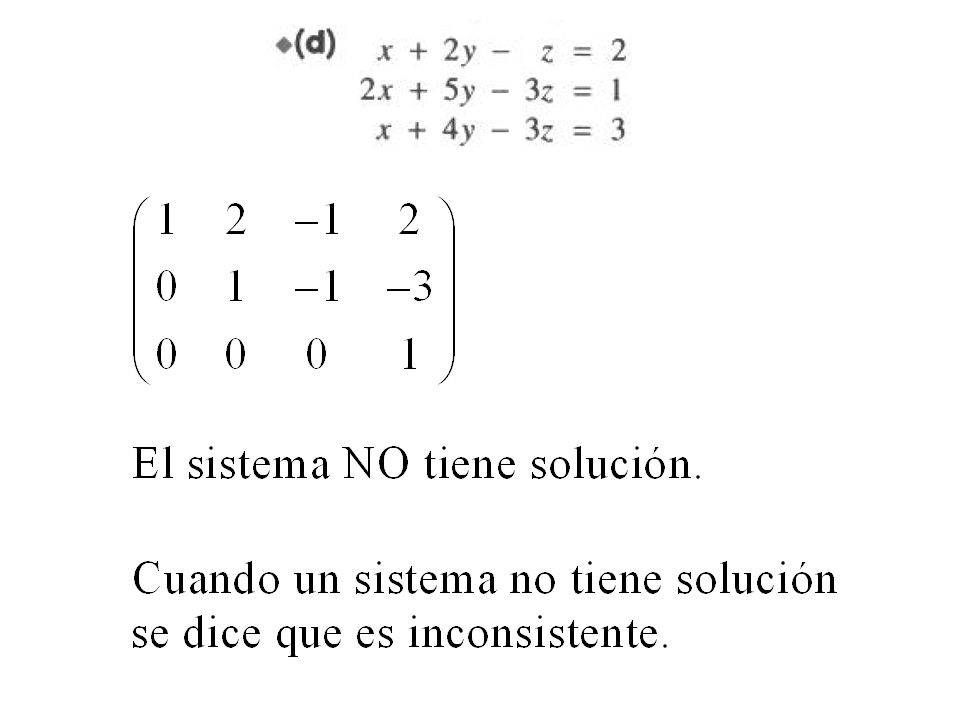
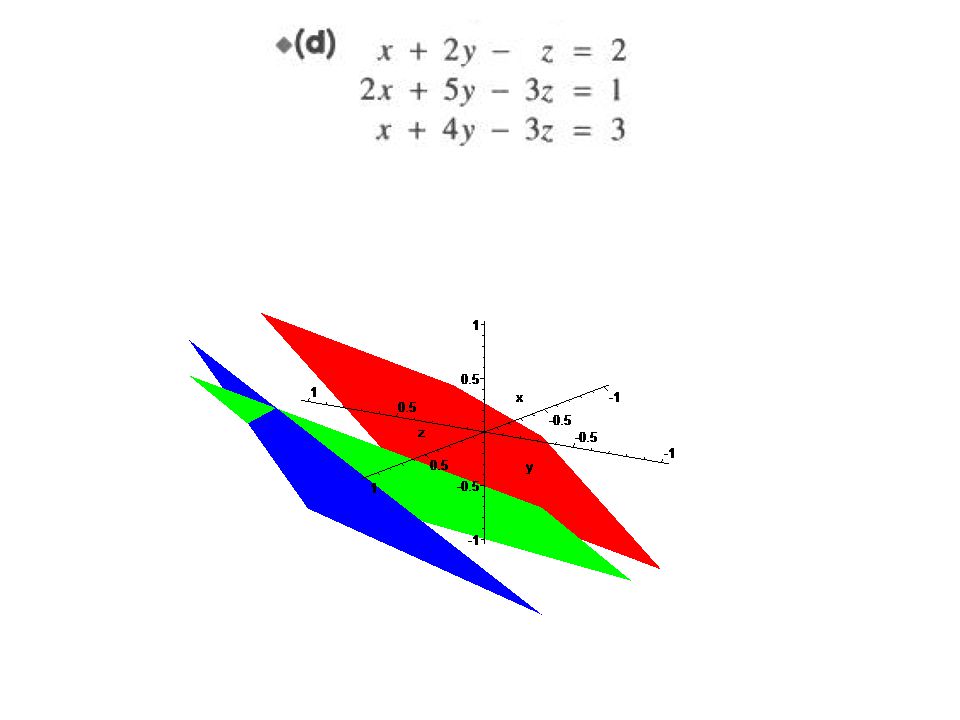
Discusión

126
Hasta aquí llegue el martes 14 de septiembre del 2010 después de una clase de 1:30 horas

127
Segunda clase martes 21 de septiembre del 2010 de 12:30 a 14:00

129
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

130
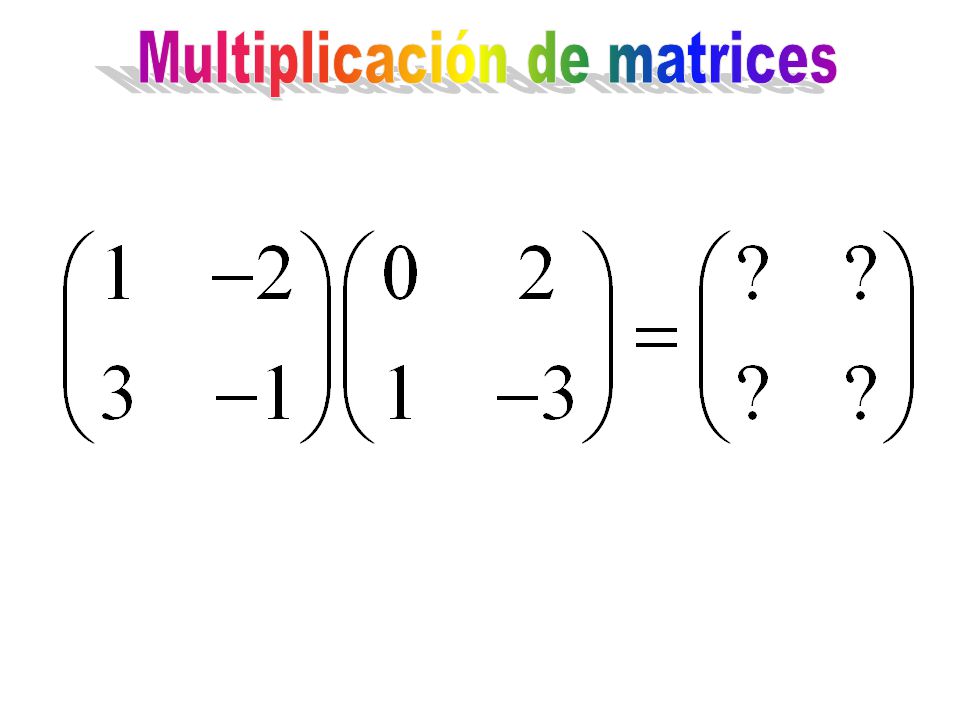
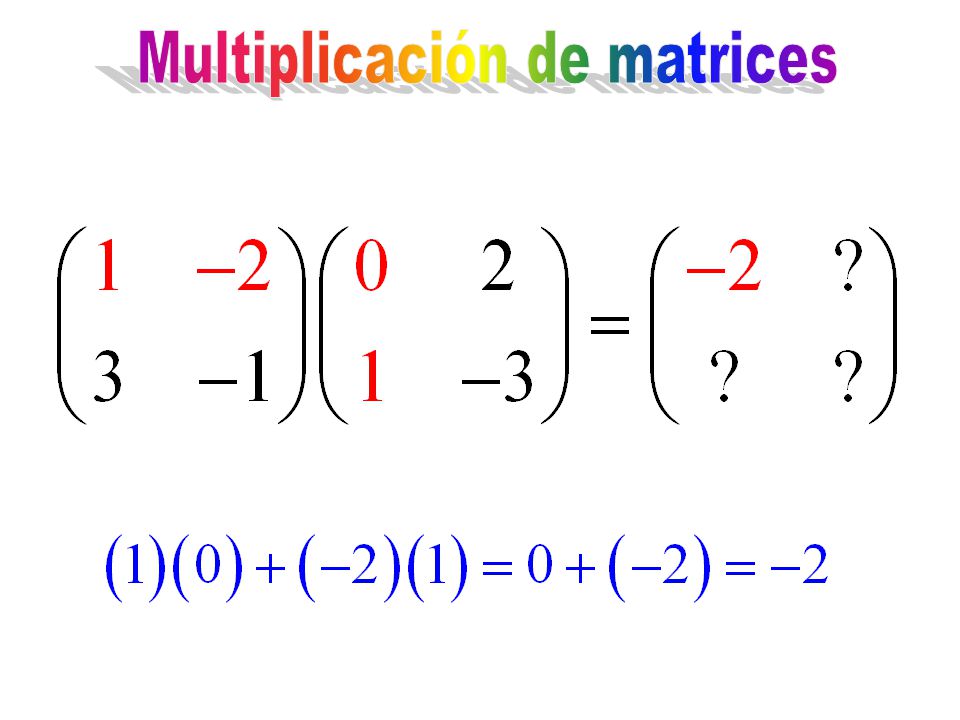
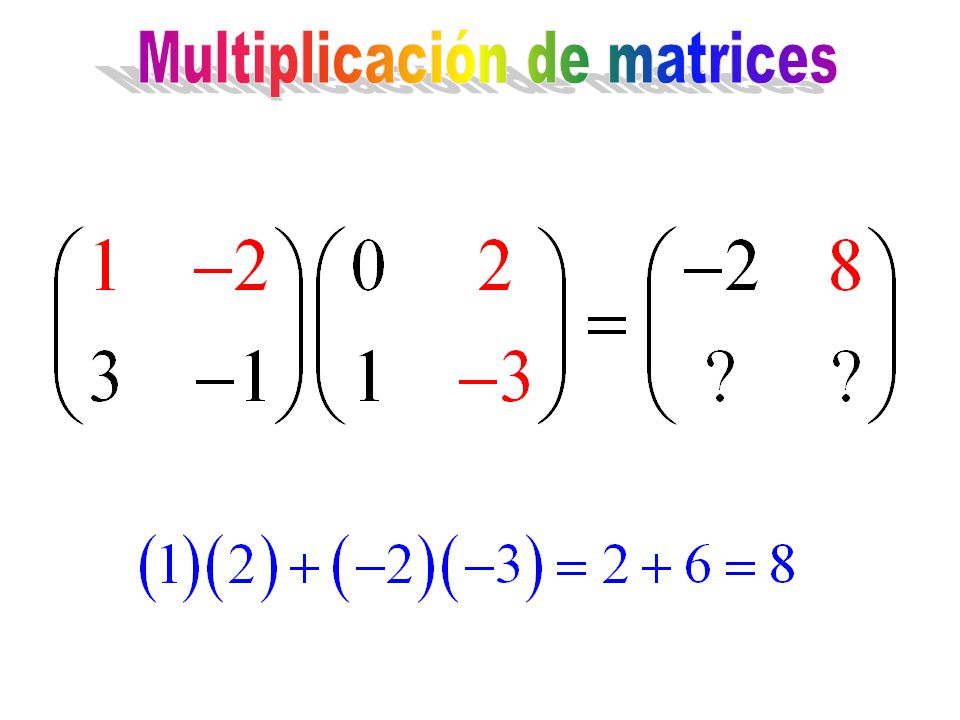
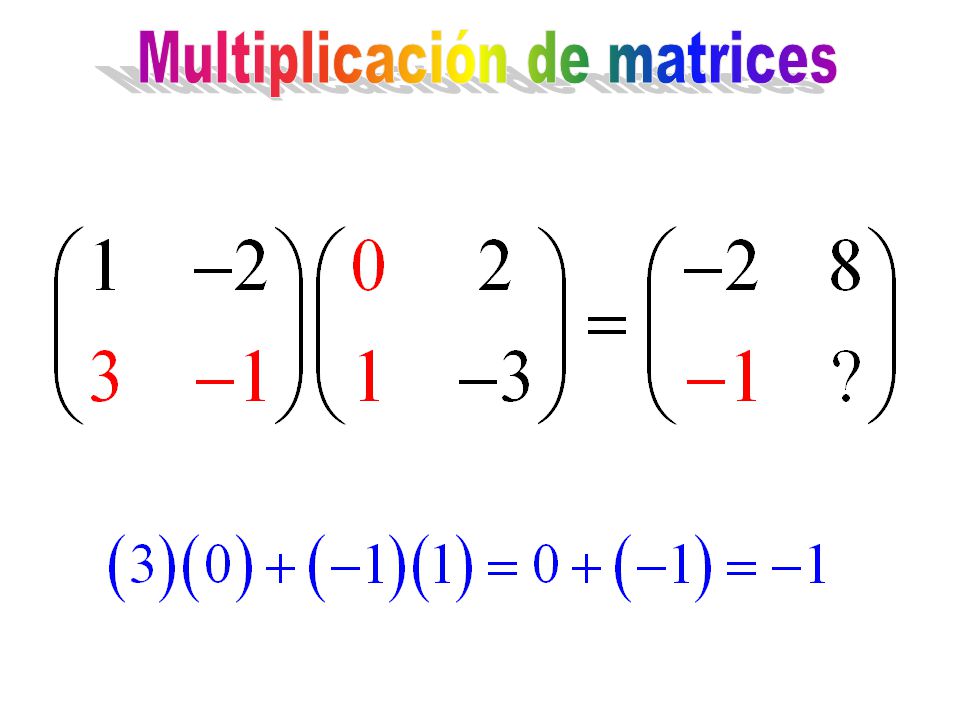
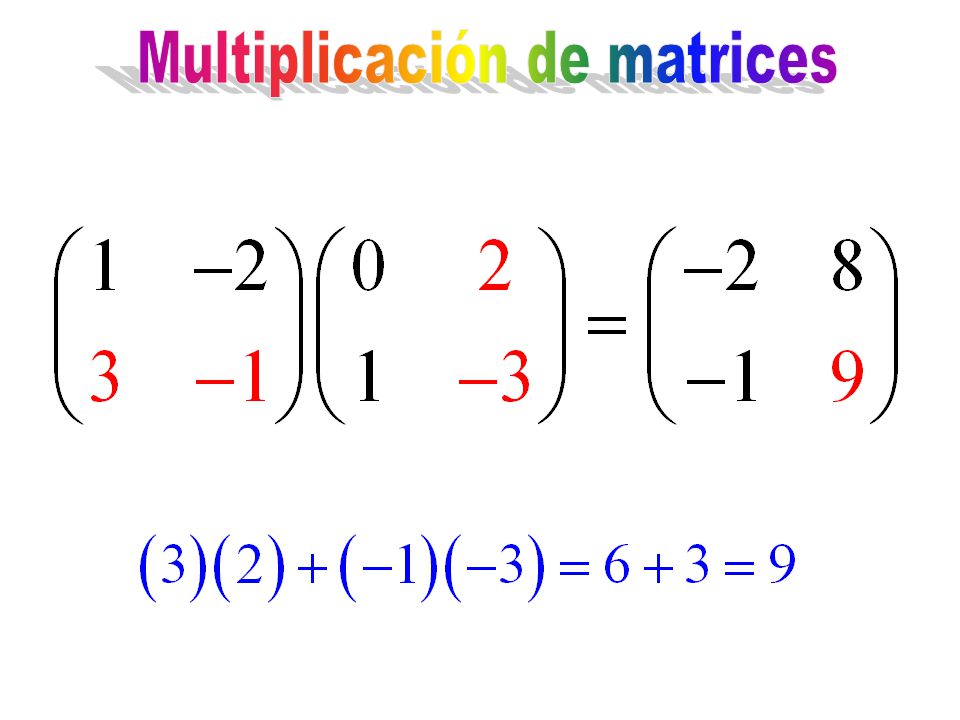
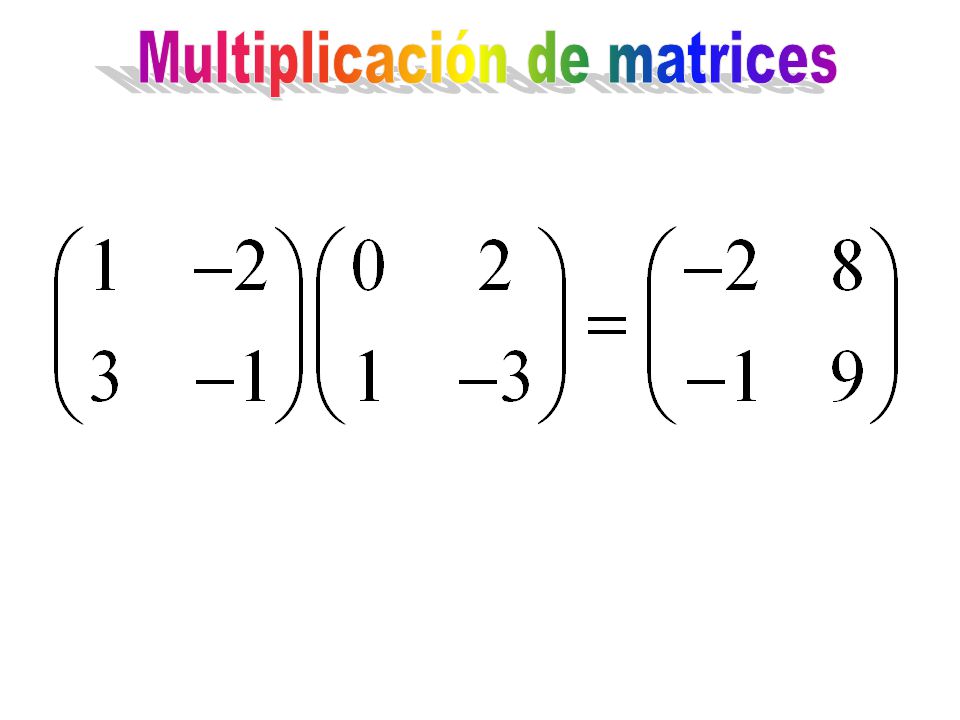
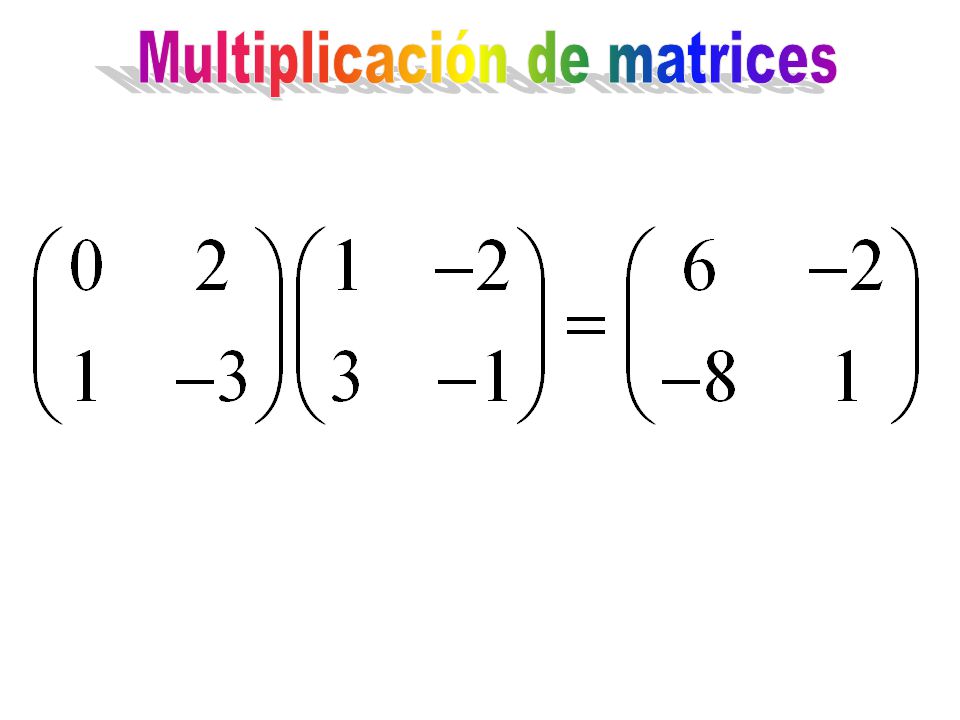
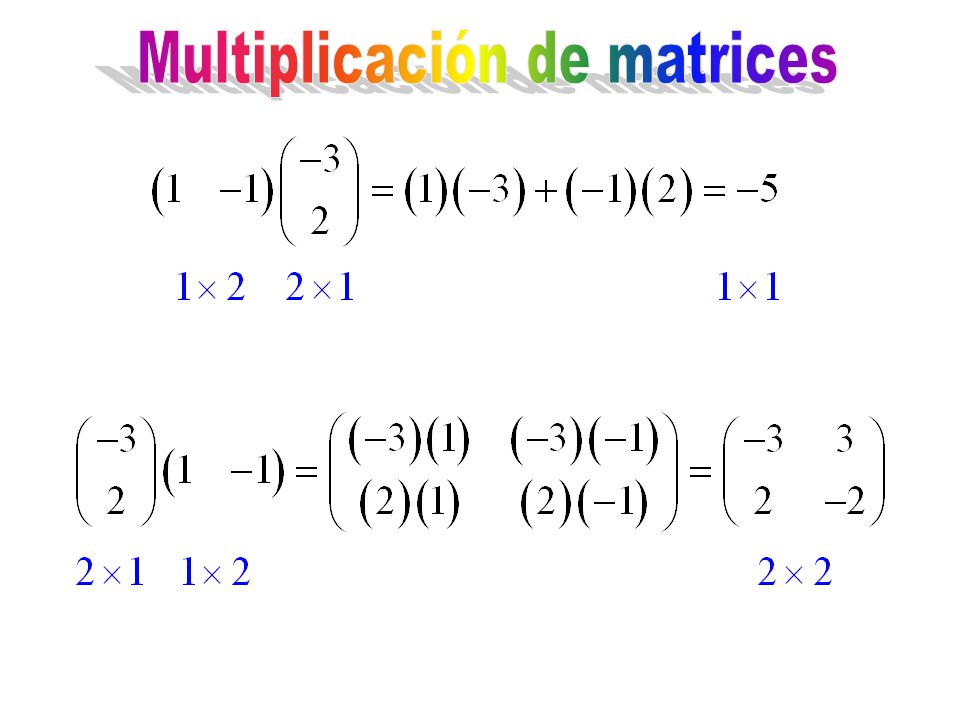
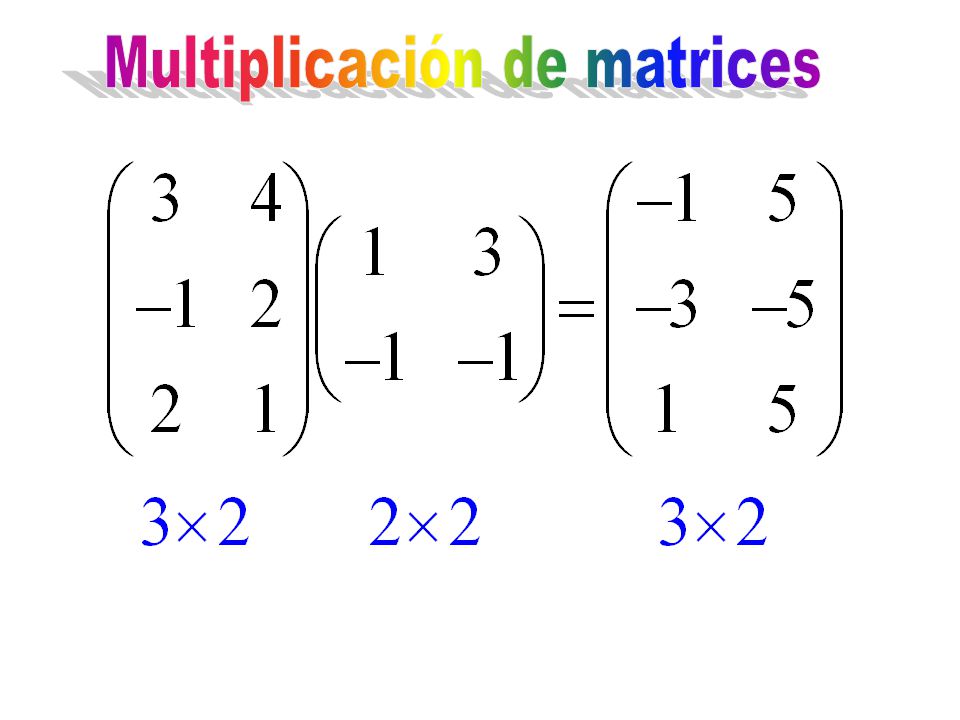
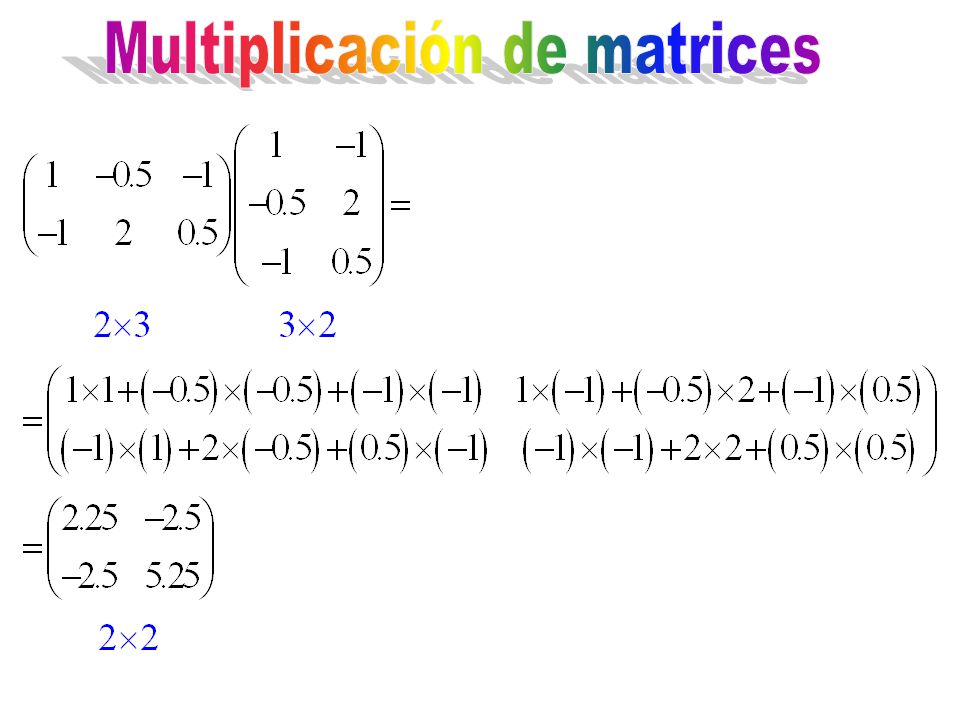
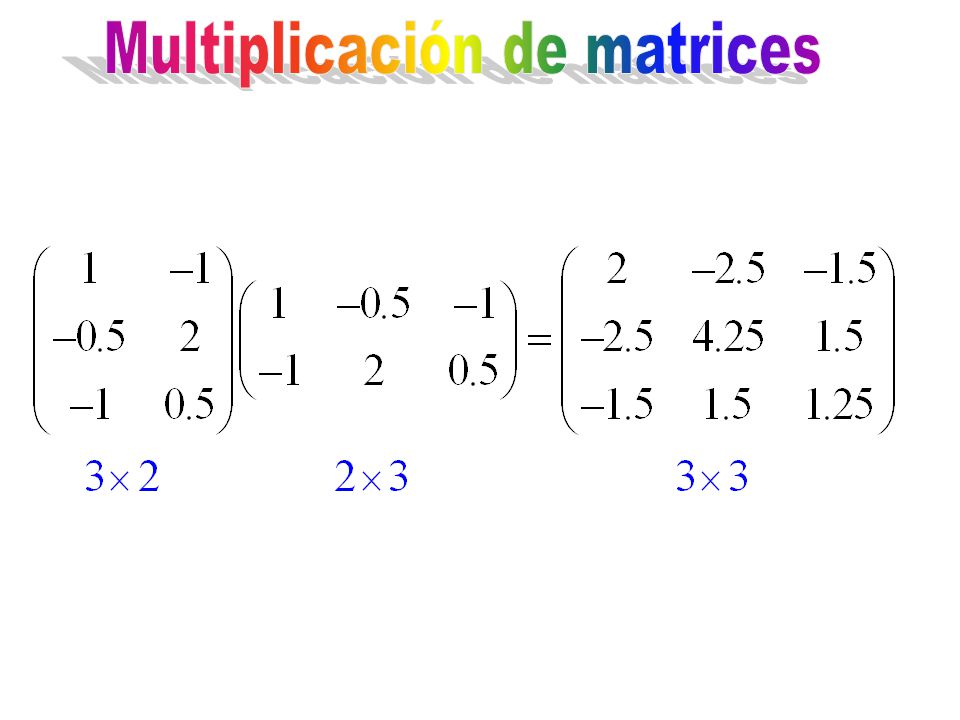
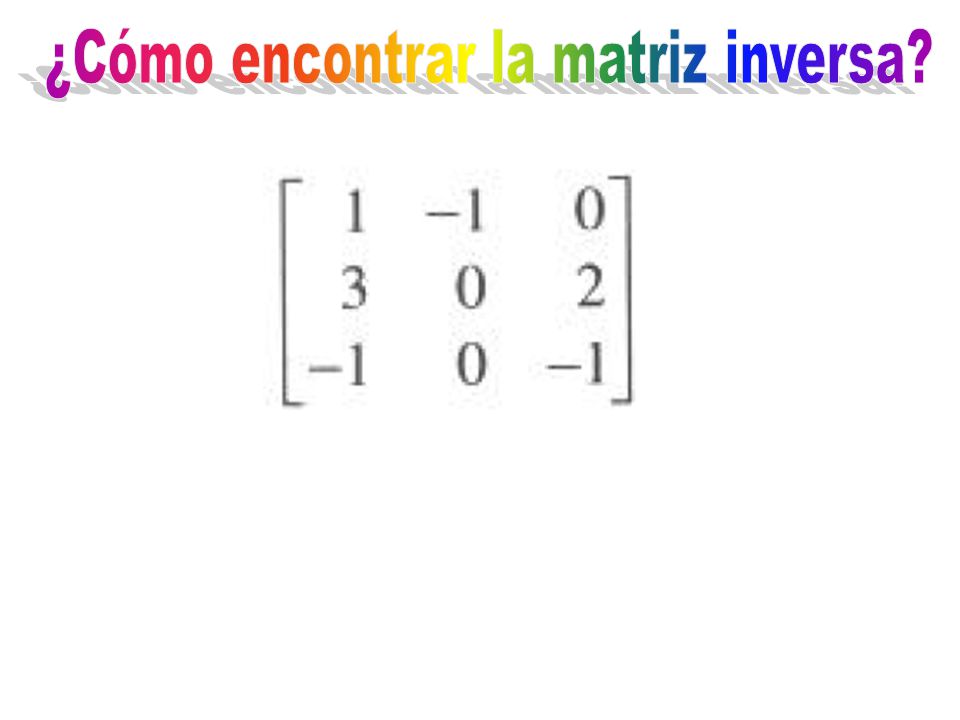
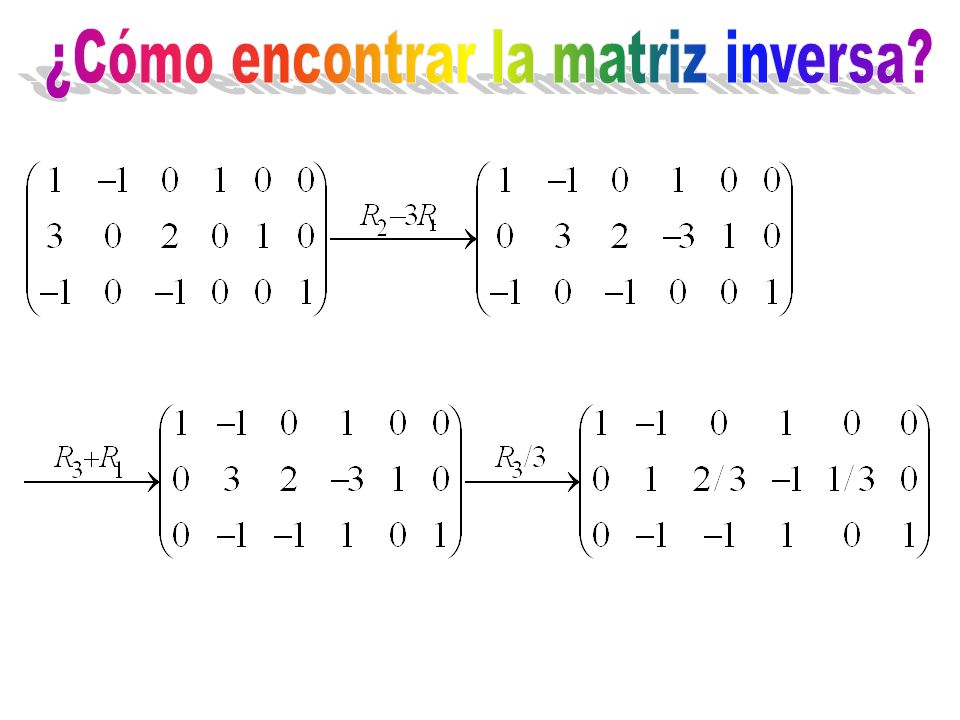
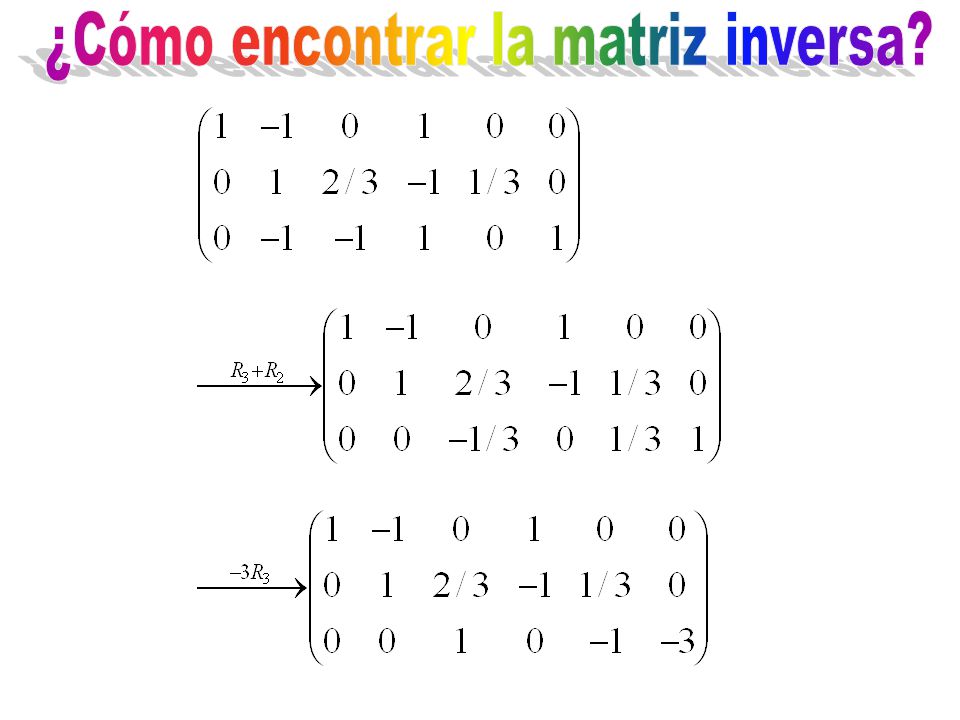
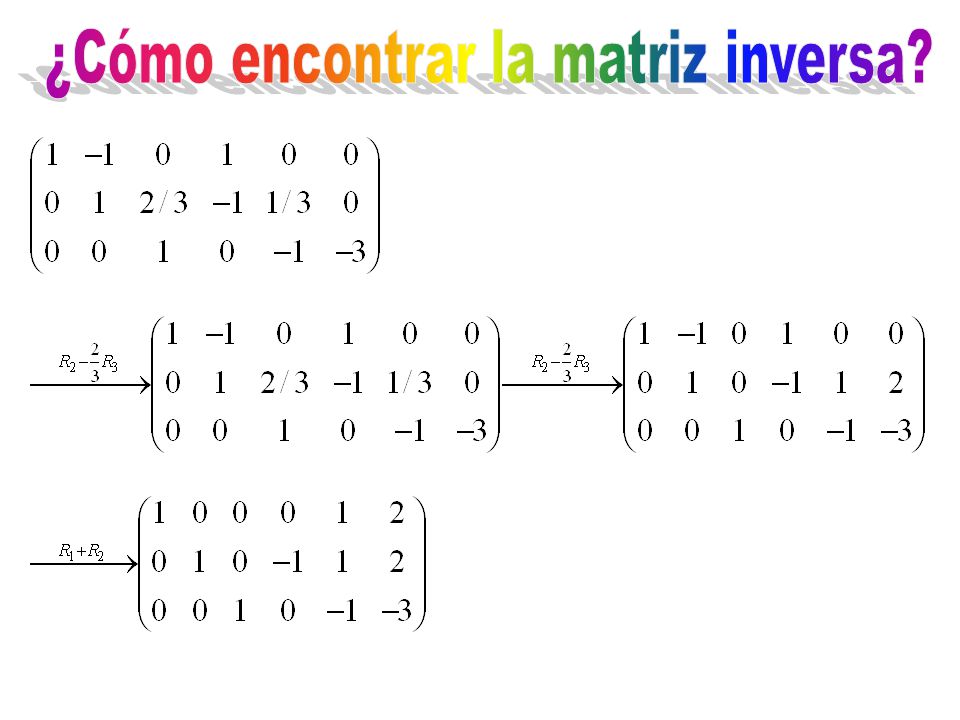
1.Suma, multiplicación por un escalar y transposición 2.Multiplicación de matrices 3.Matrices inversas 4.Matrices elementales

163
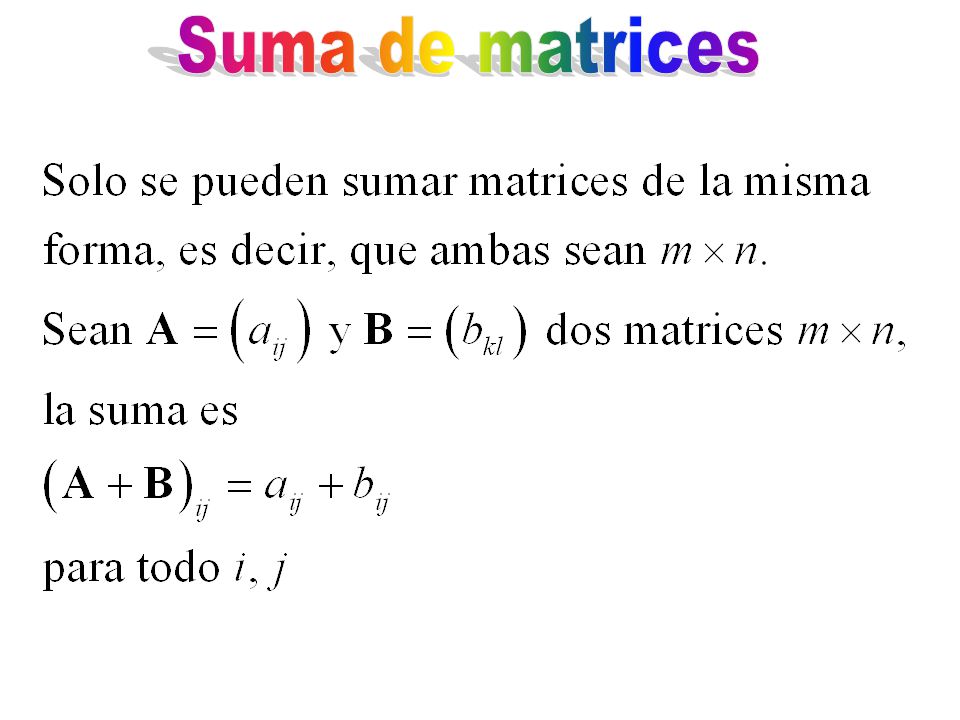
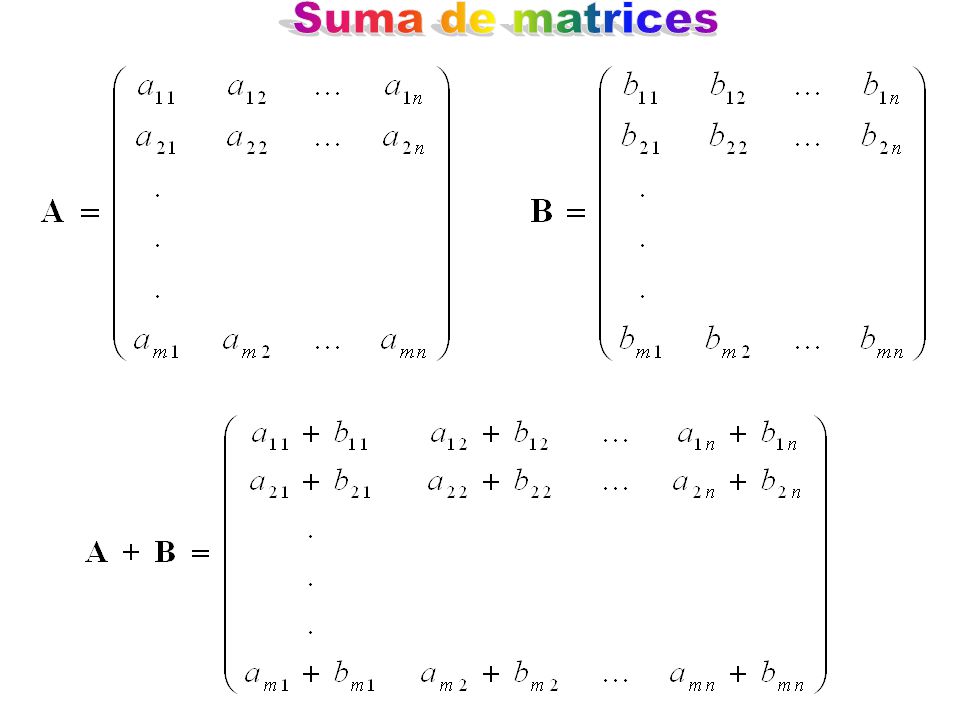
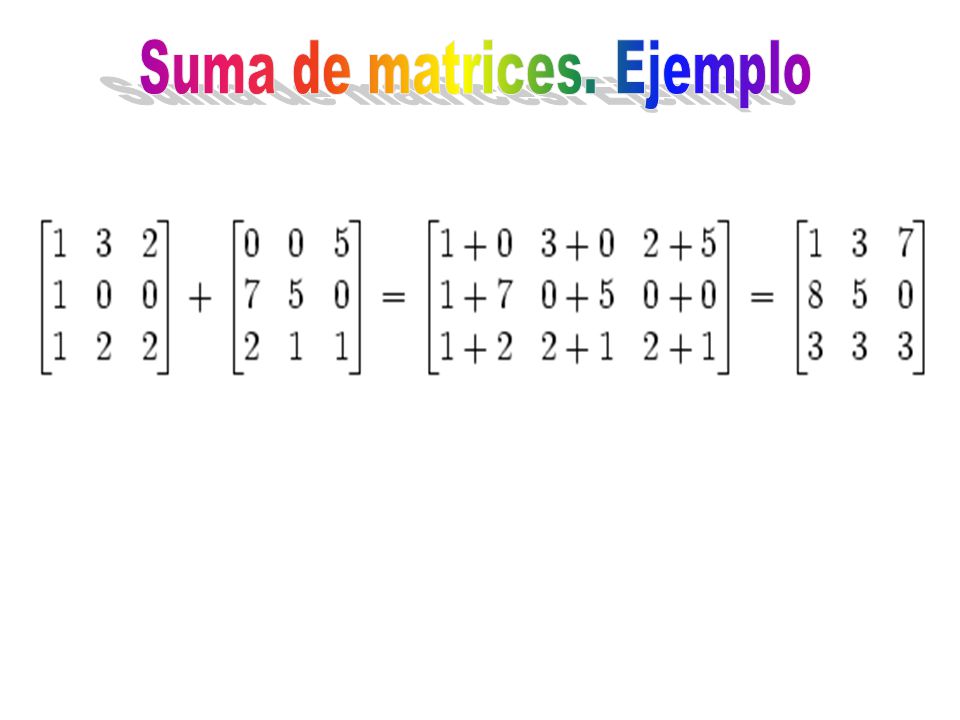
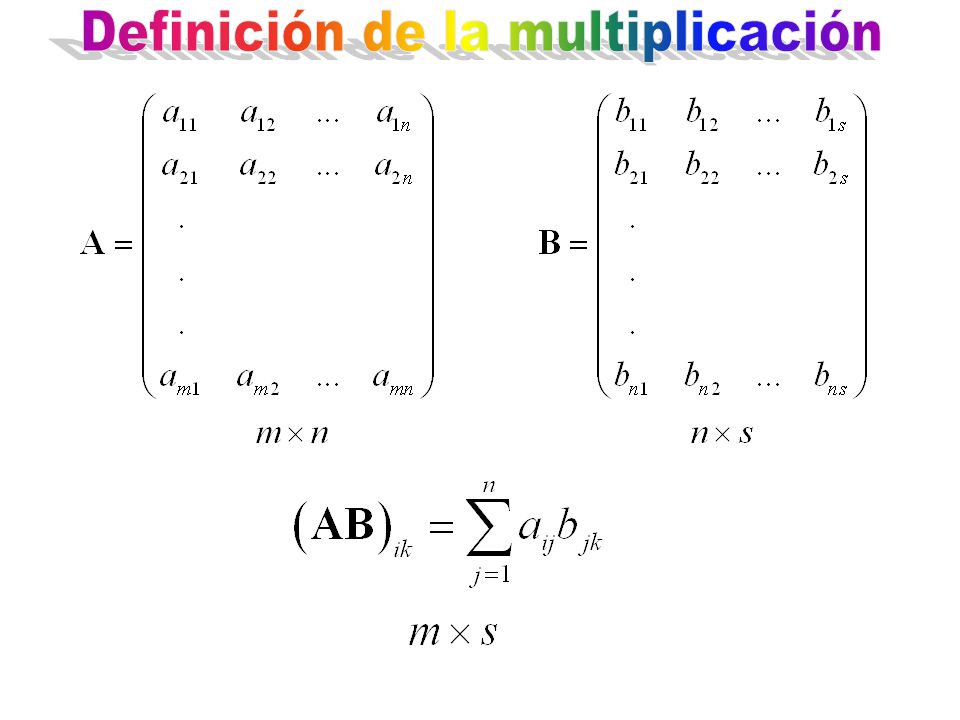
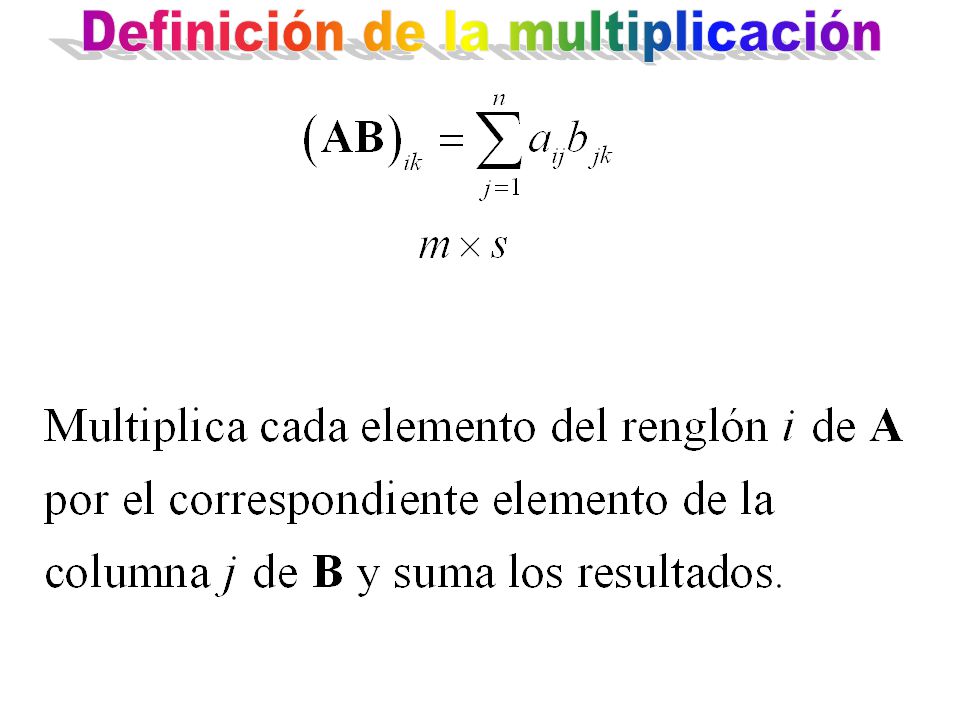
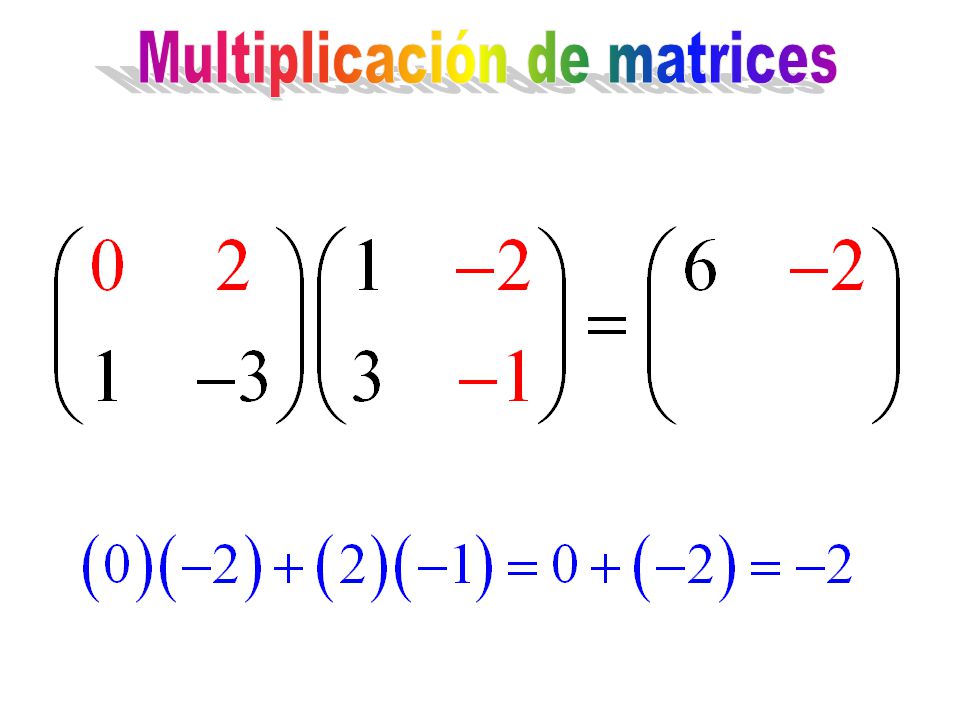
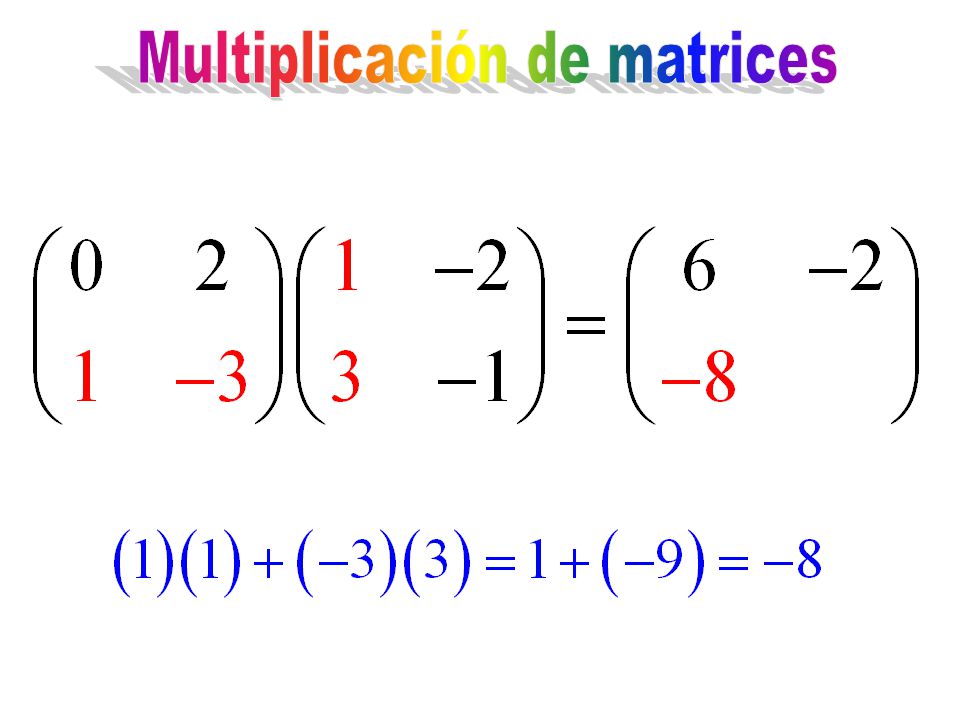
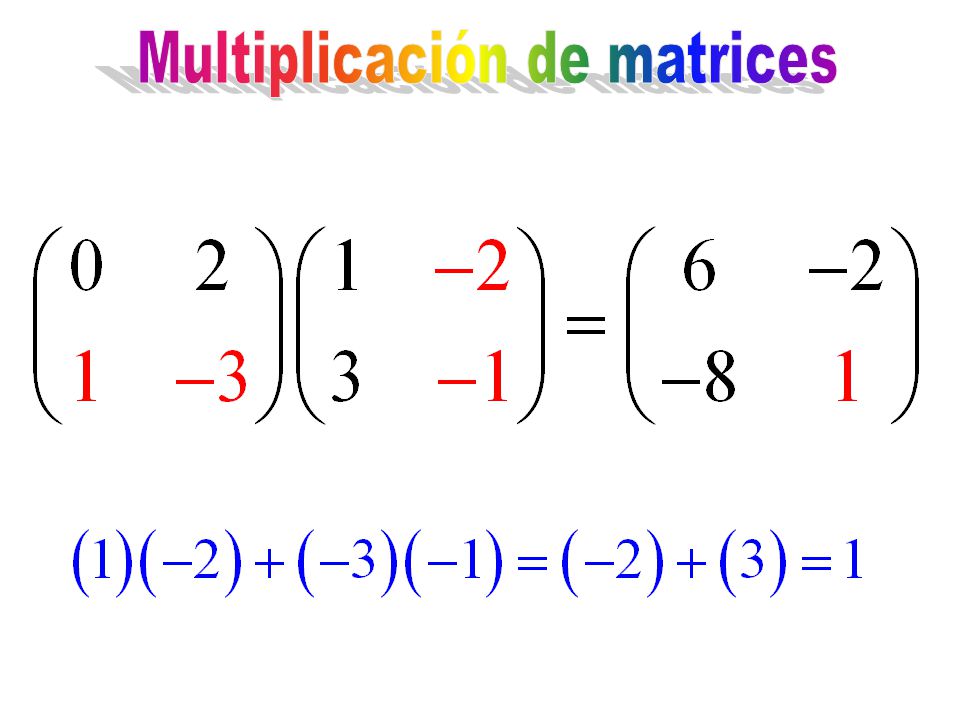
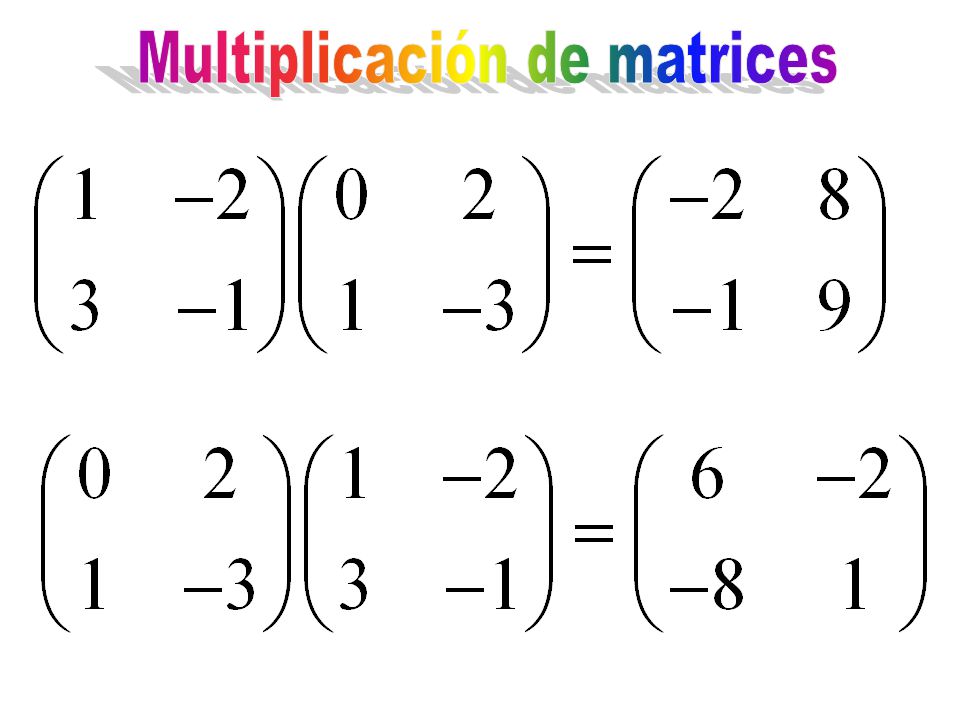
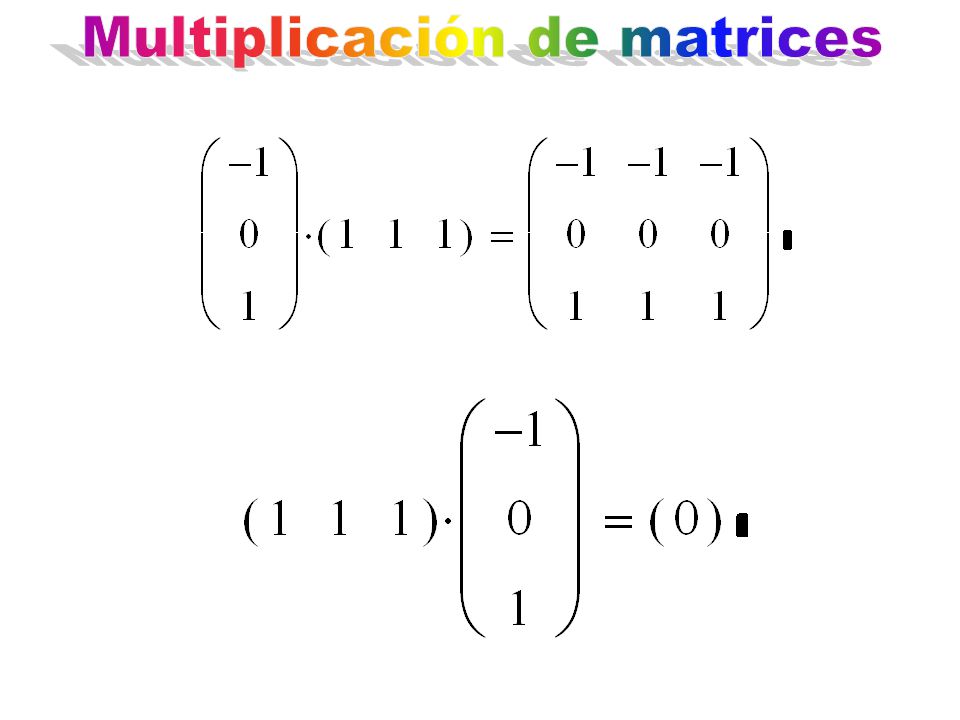
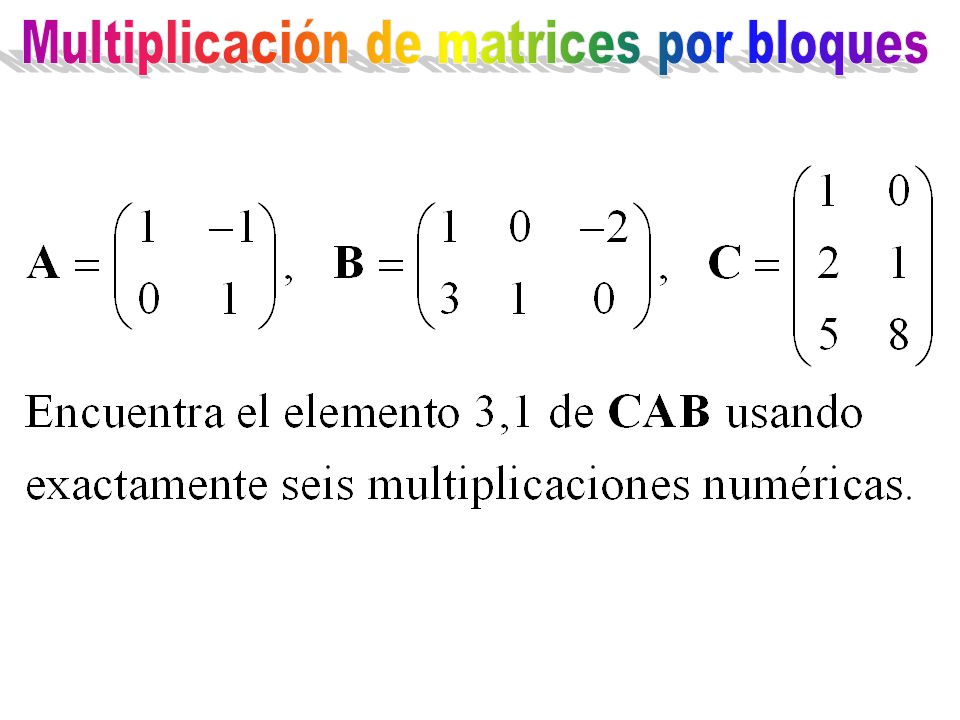
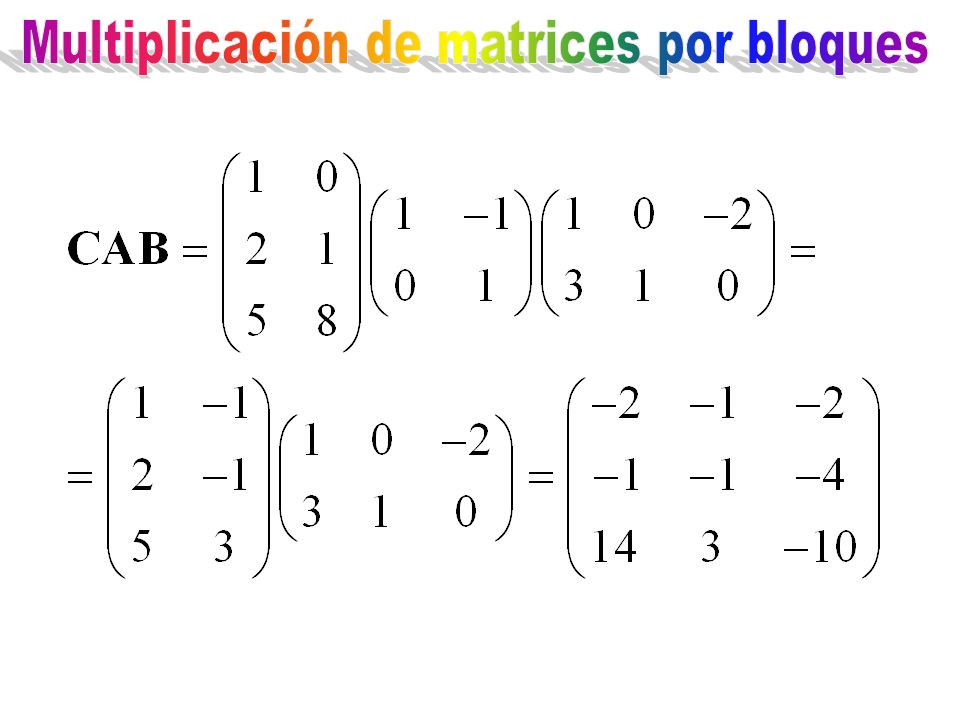
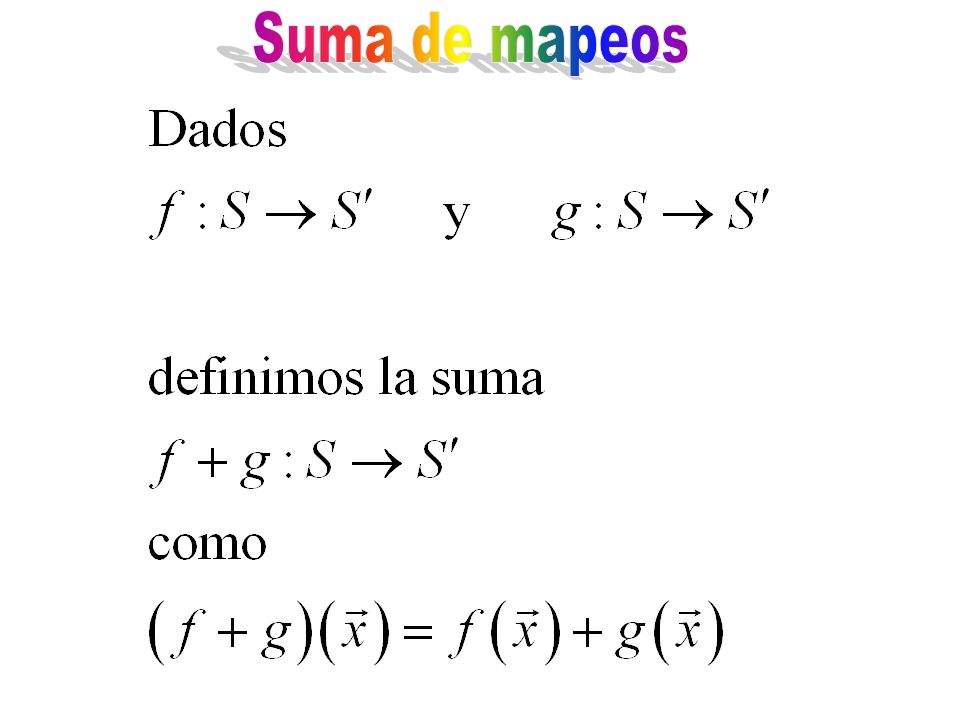
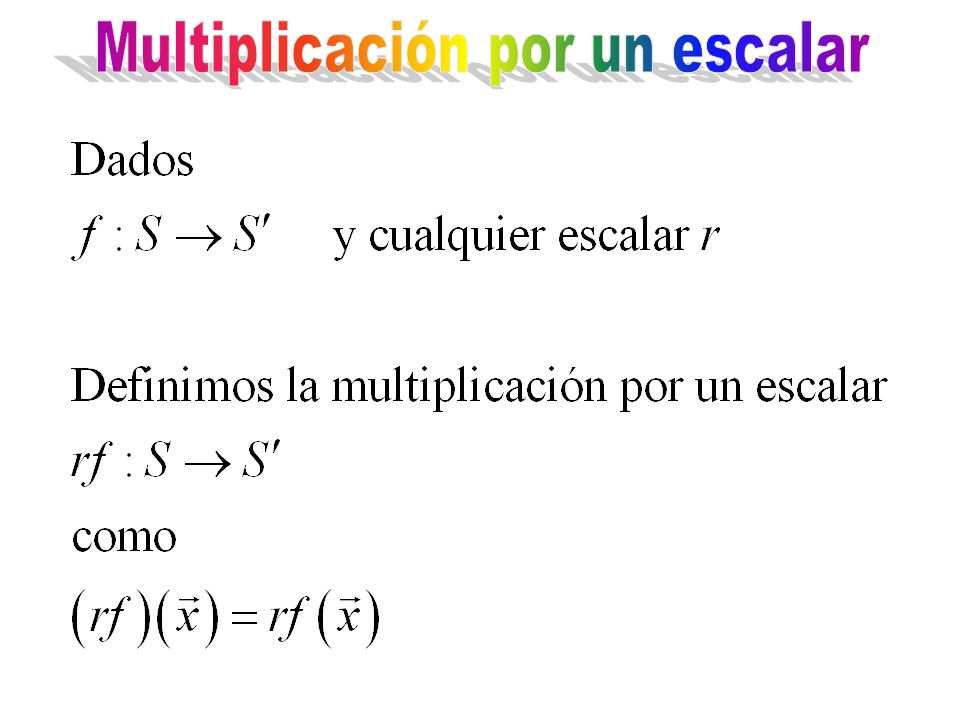
La suma de dos matrices Multiplicación de una matriz por un escalar Multiplicación de dos matrices

198
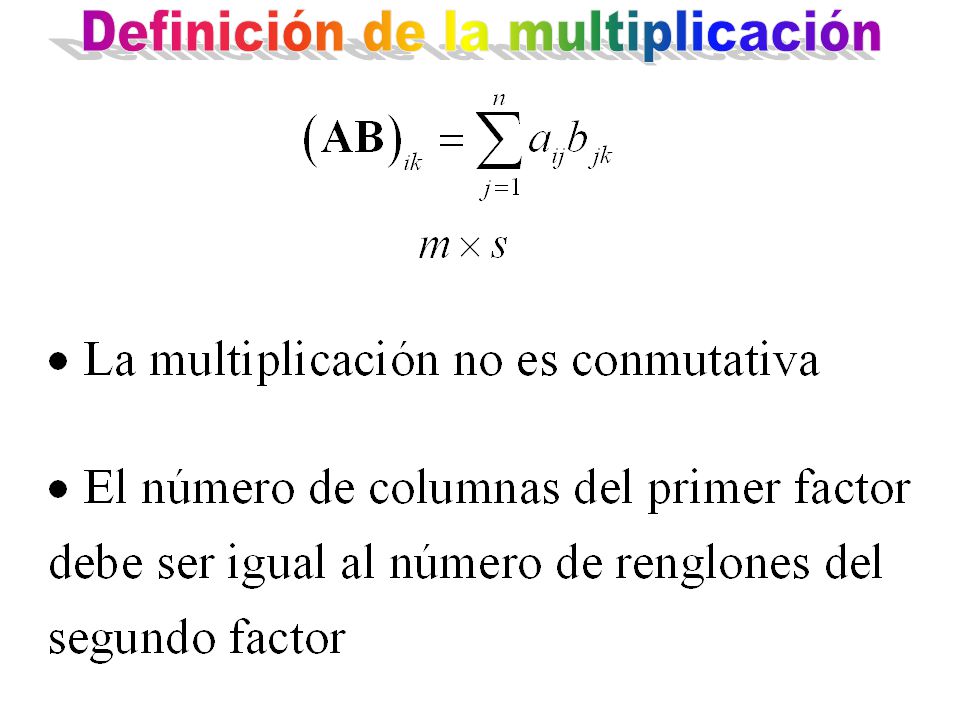
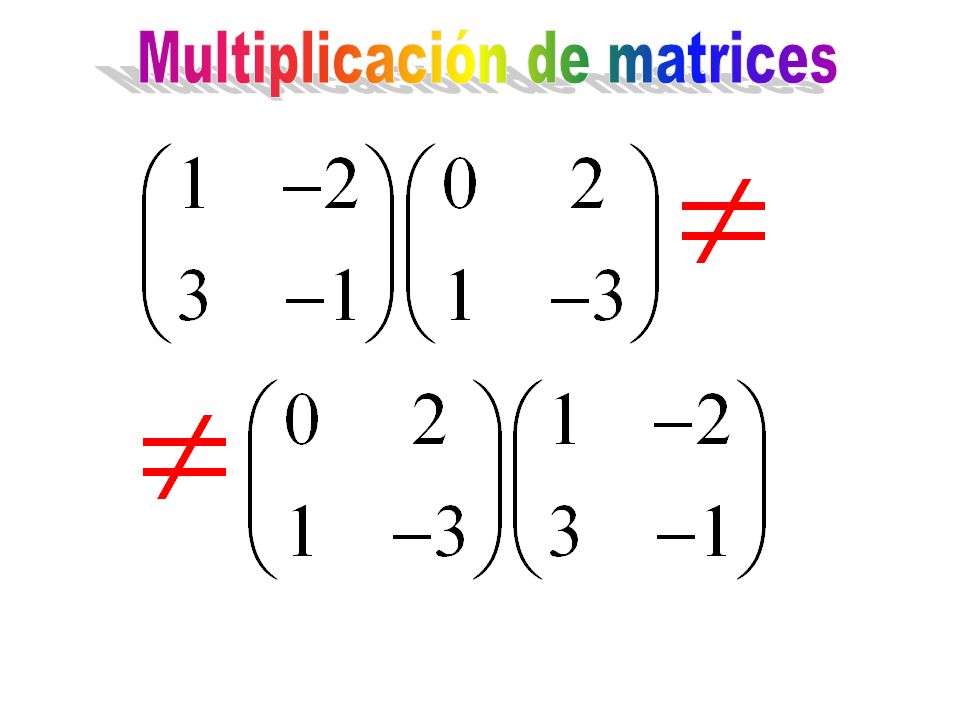
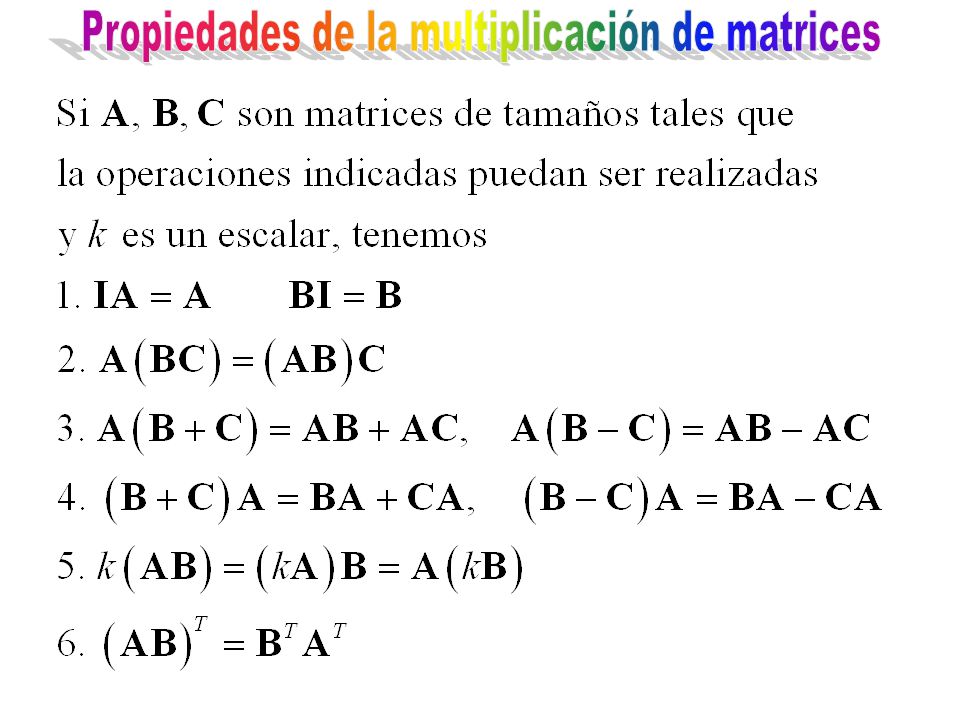
¡La multiplicación de matrices no es conmutativa!

202
No se pueden multiplicar El número de columnas del primer factor debe ser igual al número de renglones del segundo factor

231
Gráfica

241
Hasta aquí llegue el martes 21 de septiembre del 2010 después de dos clases de 1:30 horas

242
Tercera clase martes 28 de septiembre del 2010 de 12:30 a 14:00

244
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

252
1.Suma, multiplicación por un escalar y transposición 2.Multiplicación de matrices 3.Matrices inversas 4.Matrices elementales

267
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

313
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

326
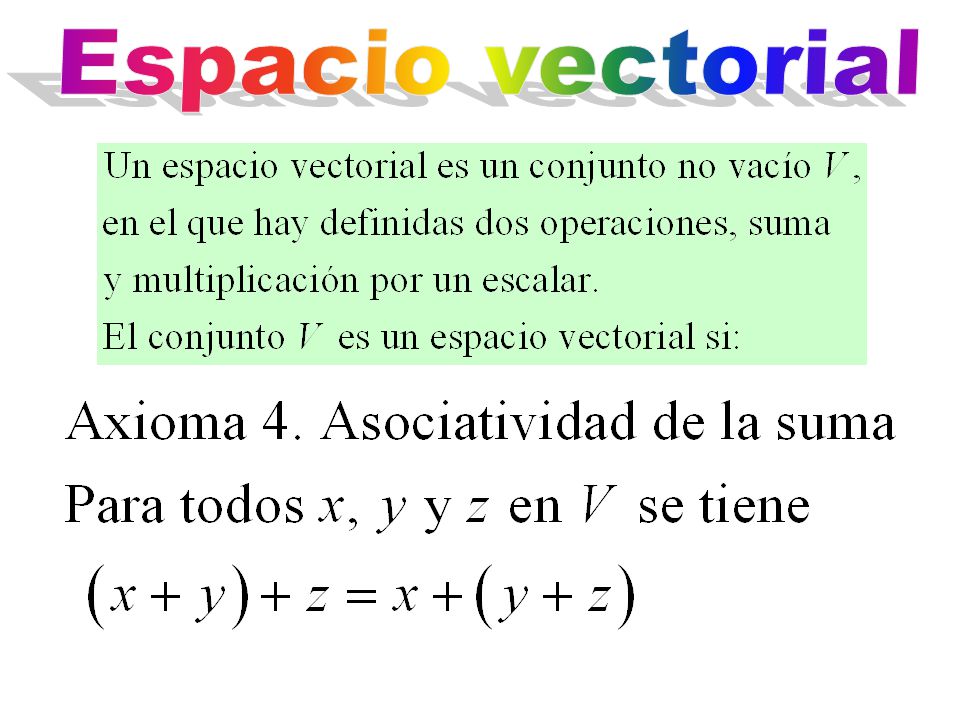
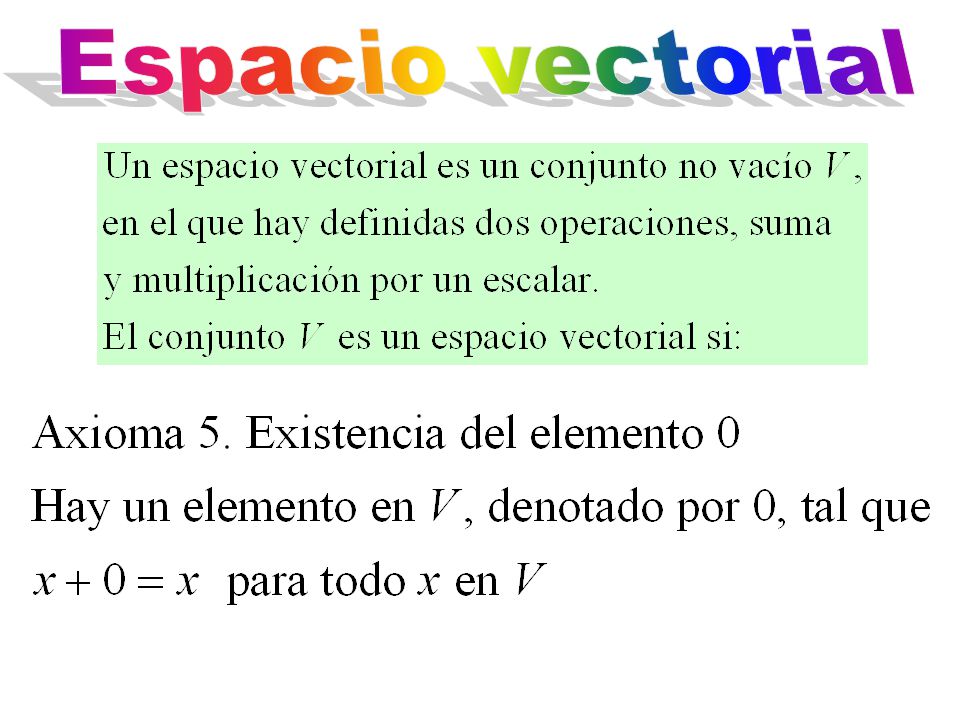
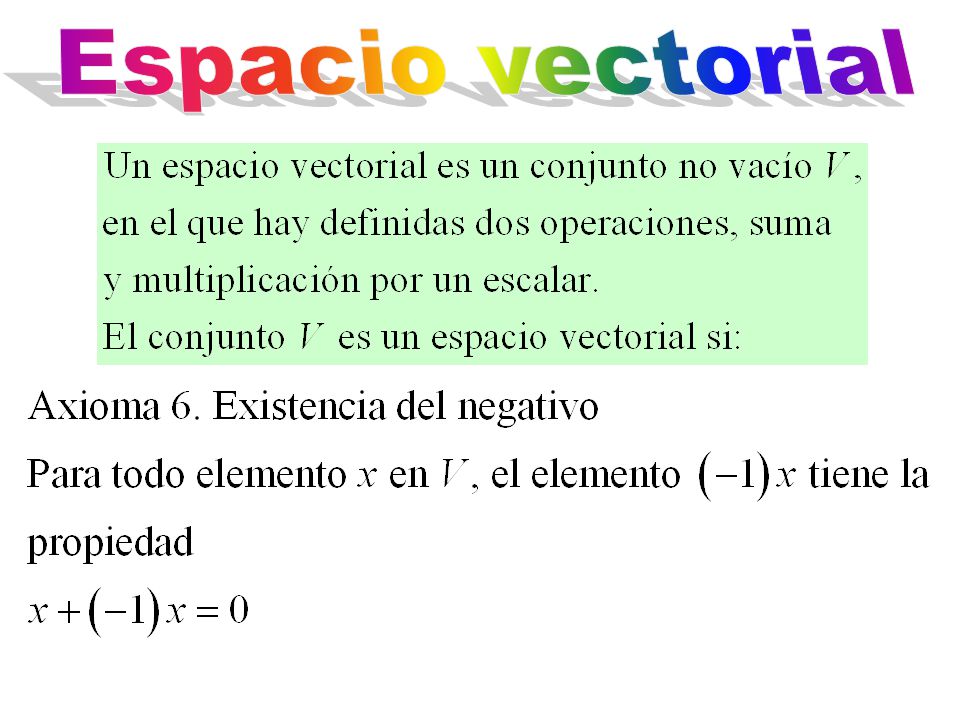
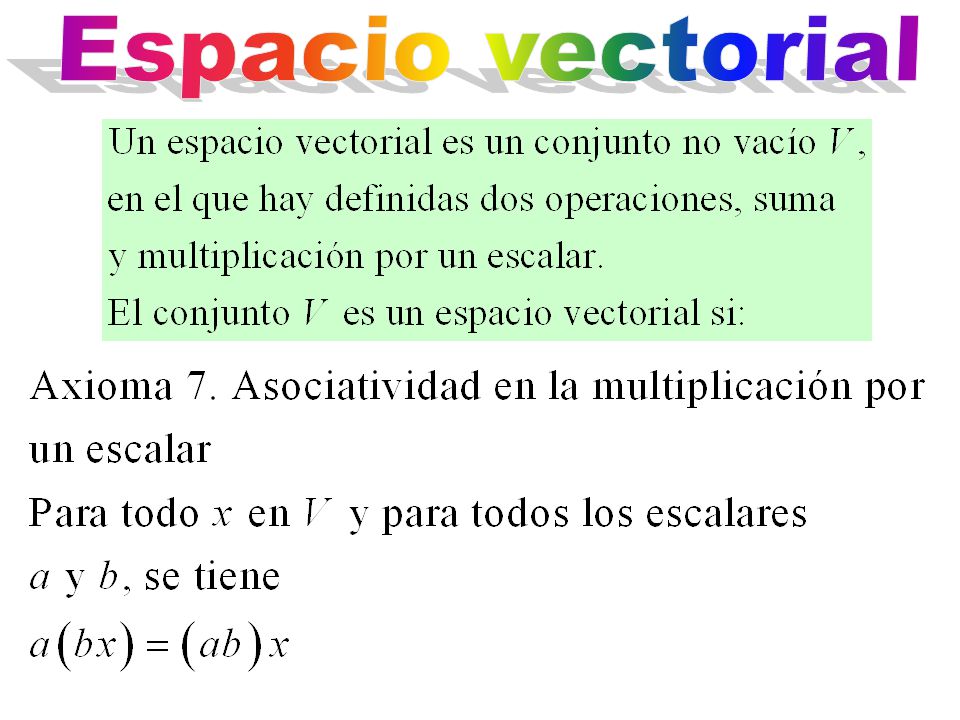
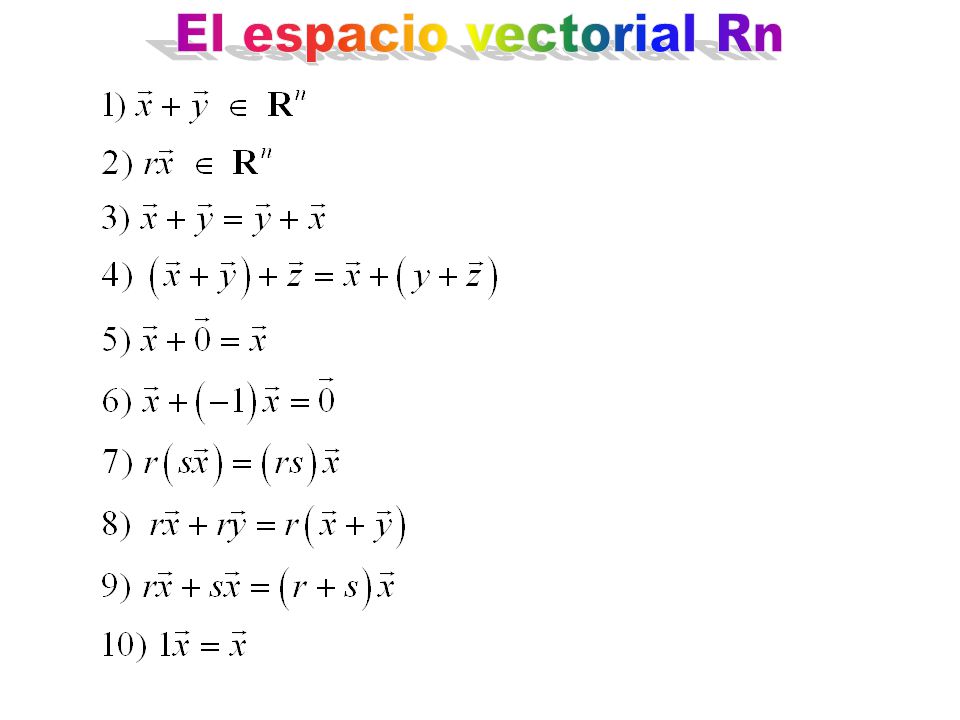
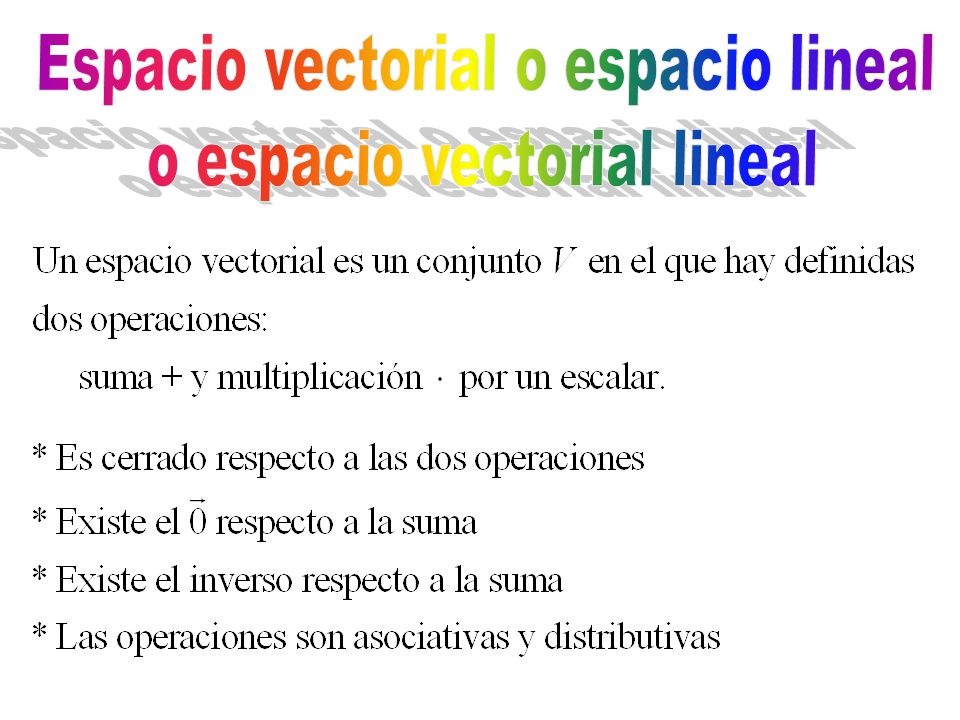
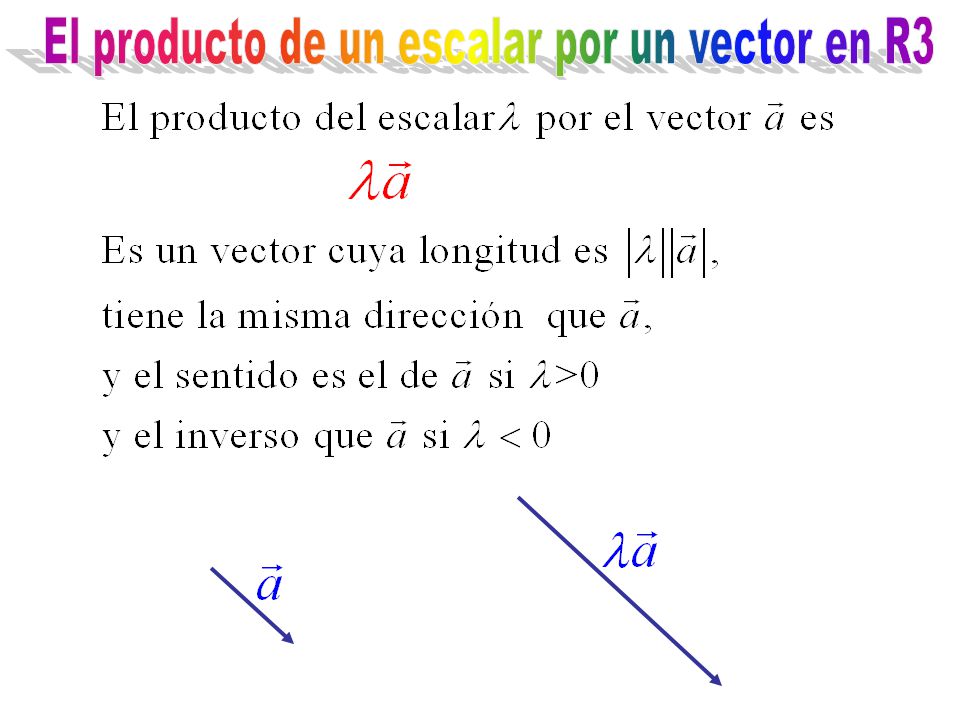
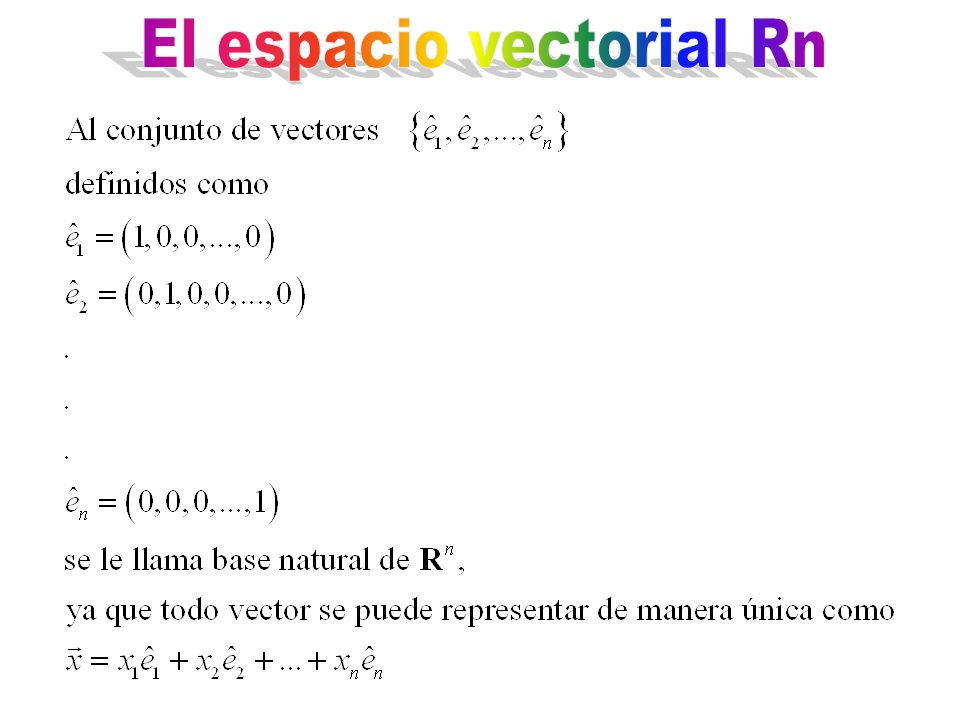
Espacios vectoriales reales Espacio vectoriales complejos A los números utilizados como multiplicadores se les denomina escalares. A los escalares los denotaremos por letras itálicas A los elementos del espacio vectorial les llamaremos genéricamente vectores. A los vectores los denotaremos por letras itálicas con flecha arriba

335
Hasta aquí llegue el martes 28 de septiembre del 2010 después de tres clases de 1:30 horas

336
Cuarta clase martes 5 de octubre del 2010 de 12:30 a 14:00

338
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

339
Repaso de la cuarta clase martes 5 de octubre del 2010 de 12:30 a 14:00

352
Espacios vectoriales reales Espacio vectoriales complejos A los números utilizados como multiplicadores se les denomina escalares. A los escalares los denotaremos por letras itálicas A los elementos del espacio vectorial les llamaremos genéricamente vectores. A los vectores los denotaremos por letras itálicas con flecha arriba

353
Fin del repaso de la cuarta clase martes 5 de octubre del 2010 de 12:30 a 14:00

370
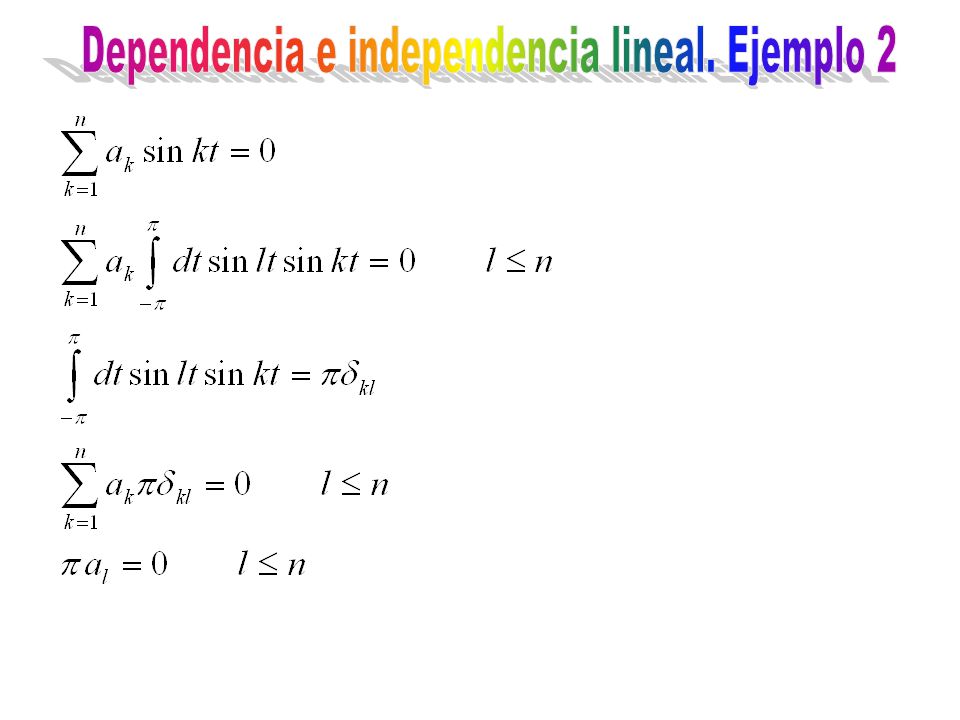
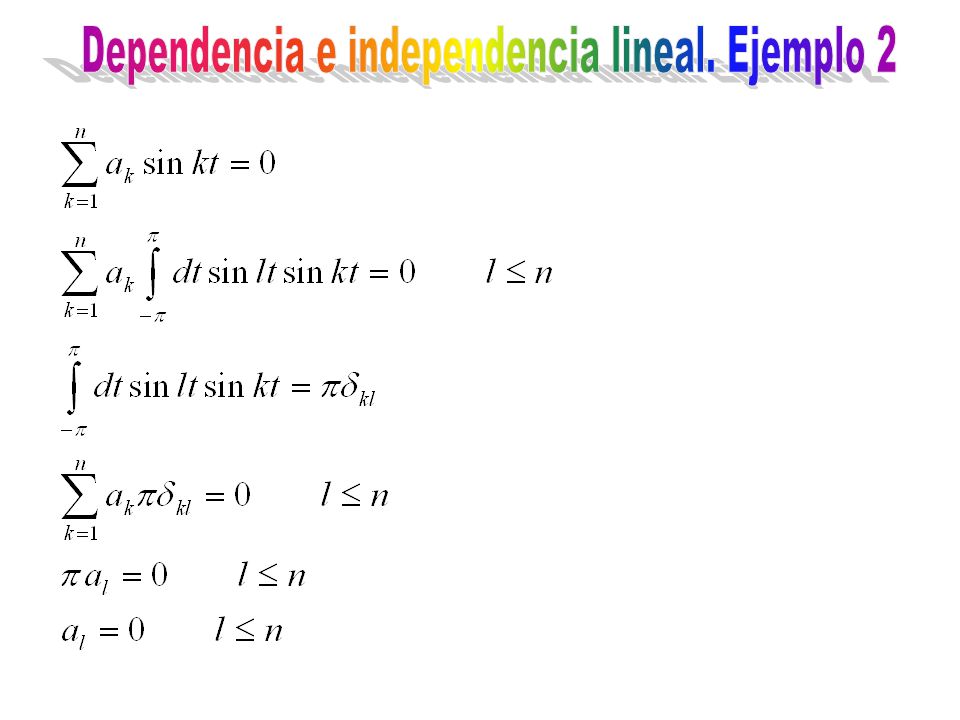
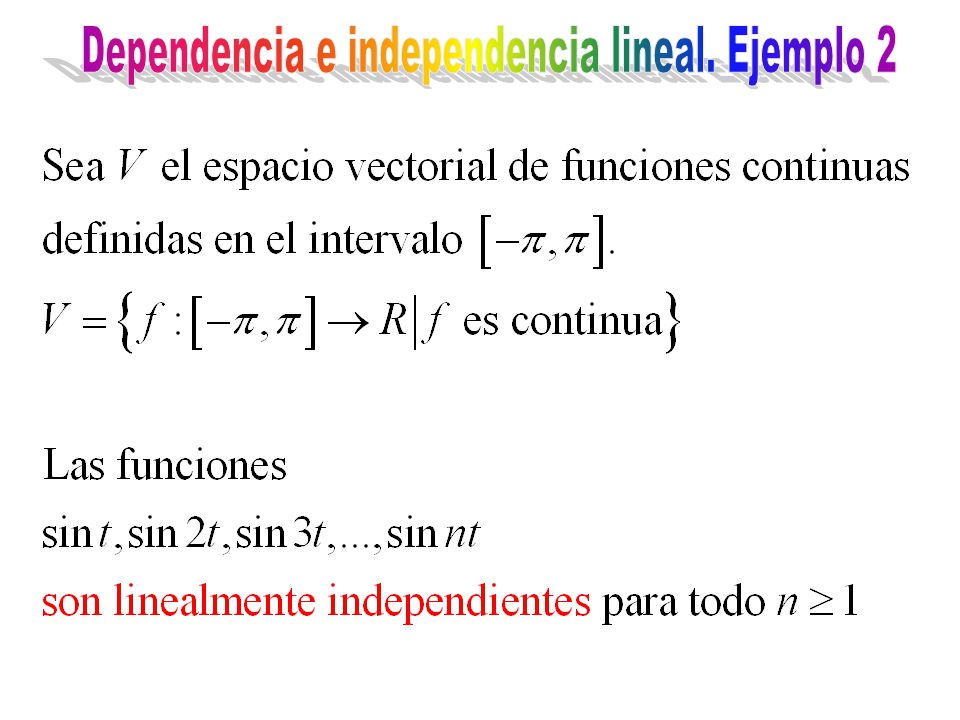
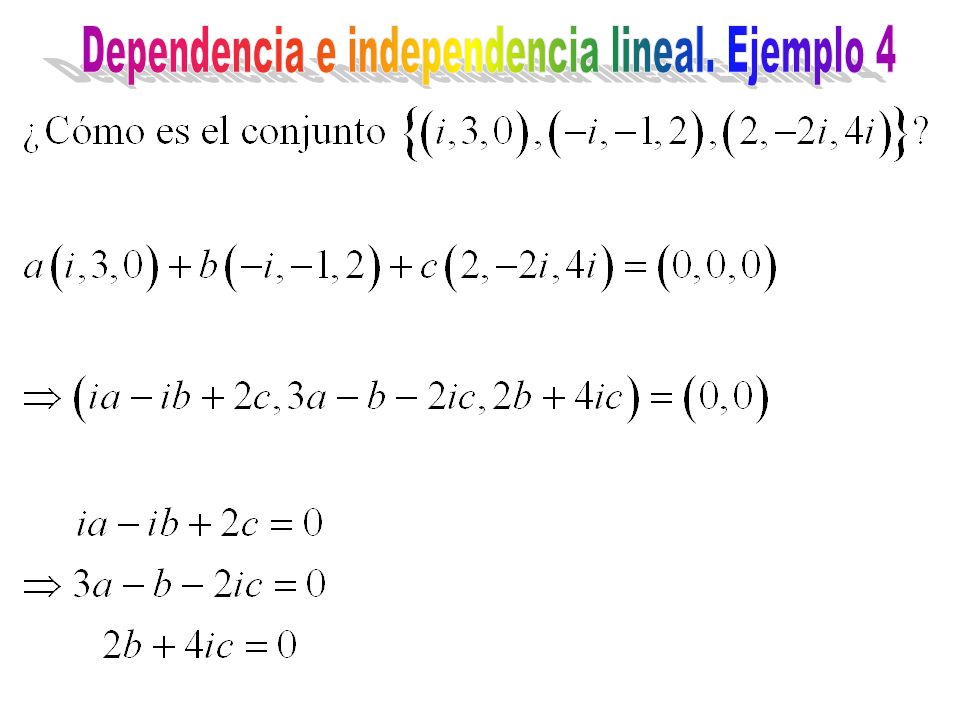
No hay forma de que una combinación lineal de ellos de cero

376
No hay forma, sin hacerlos cero, que una combinación lineal de ellos se anule

426
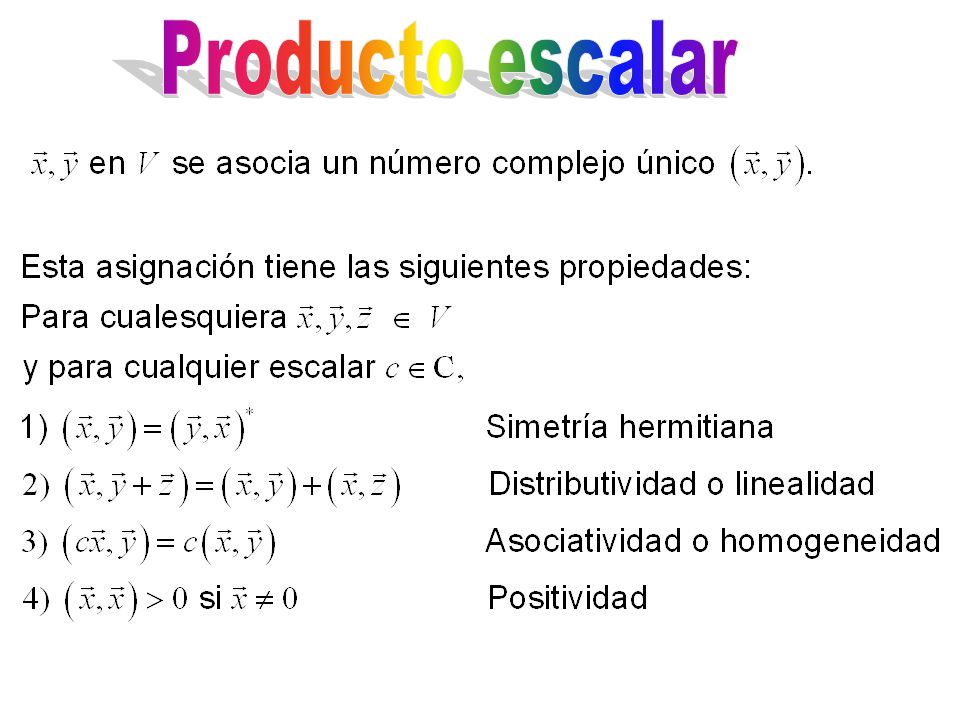
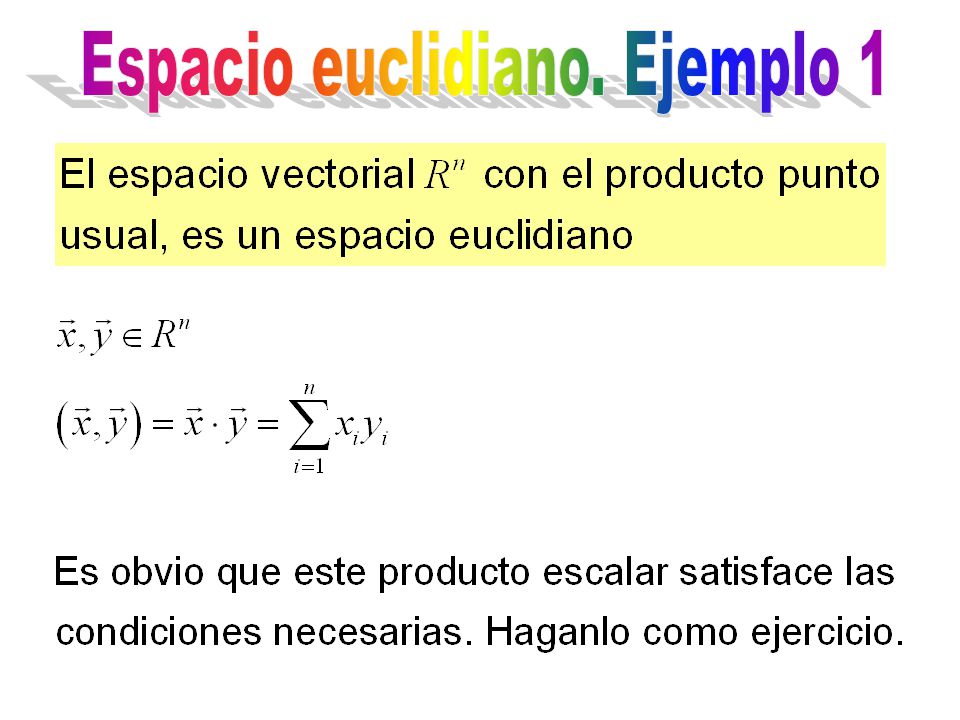
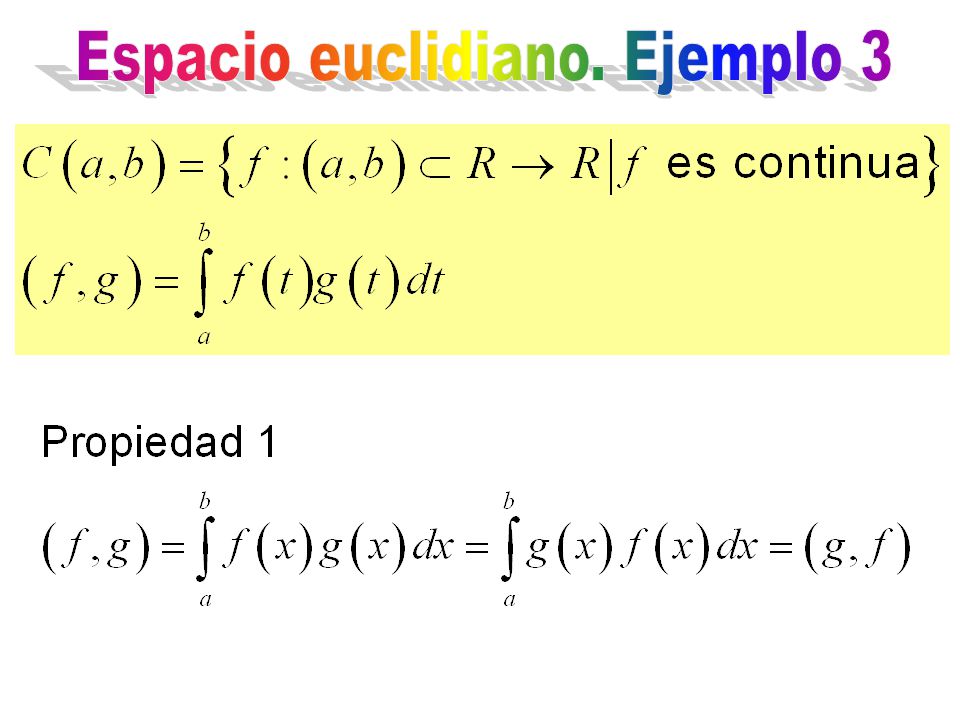
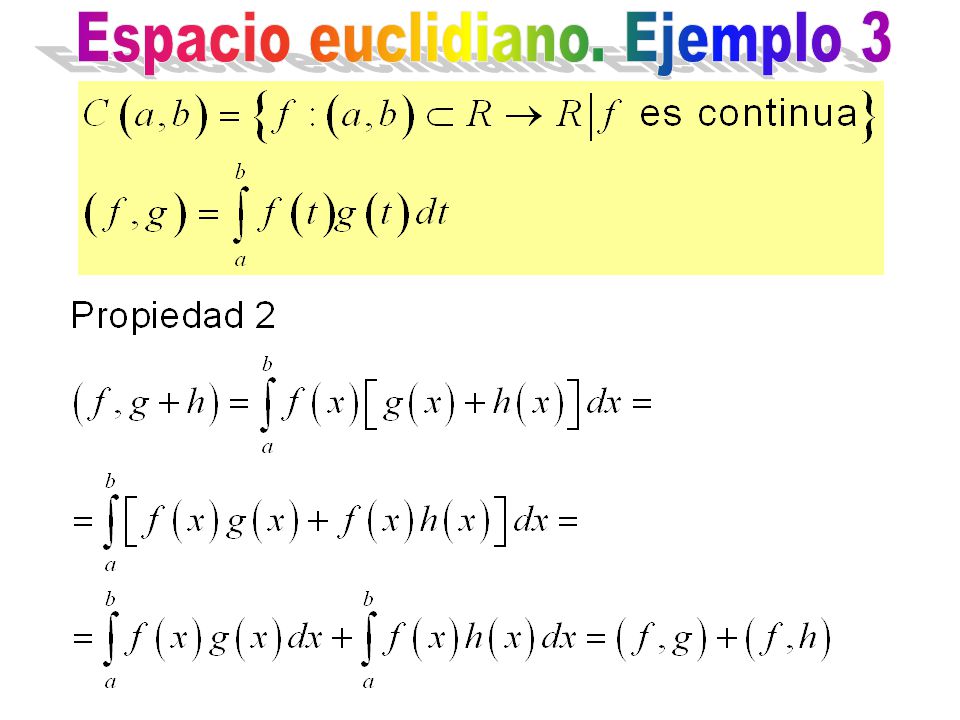
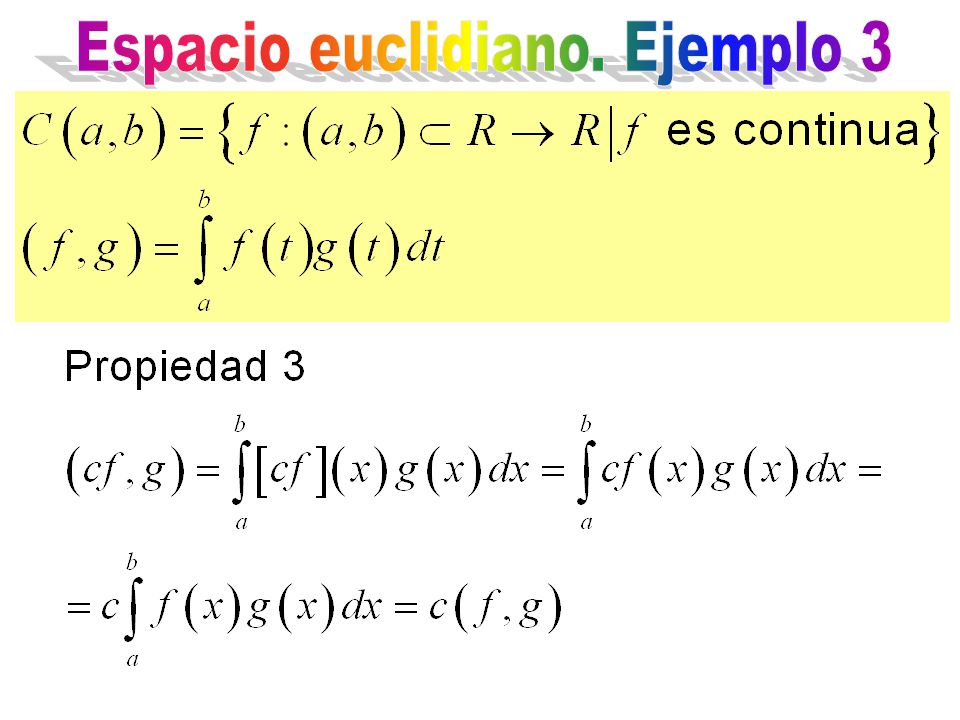
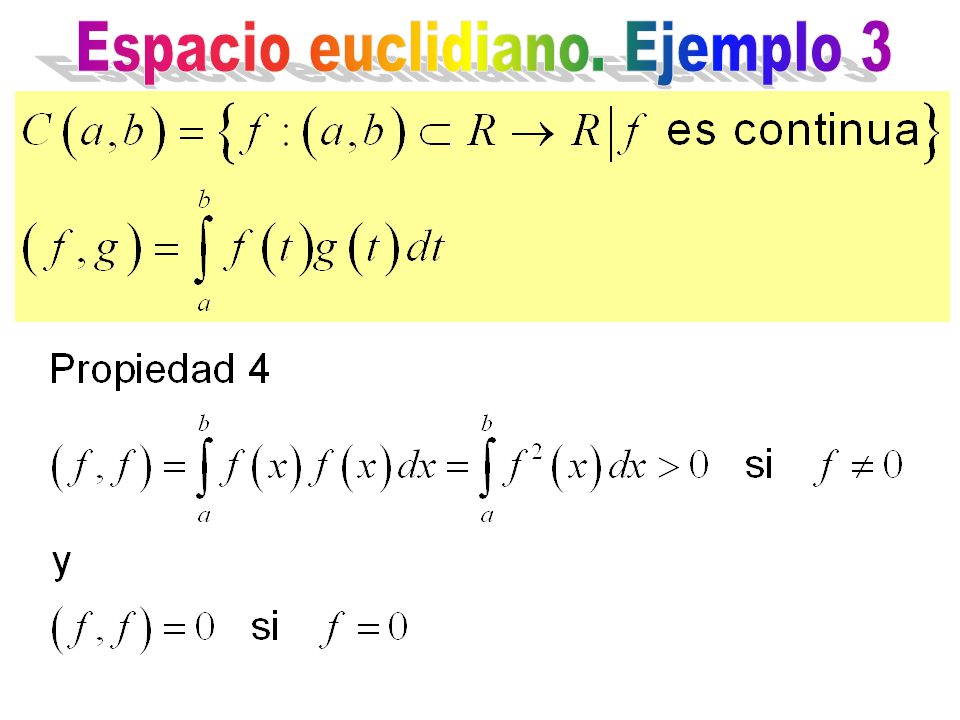
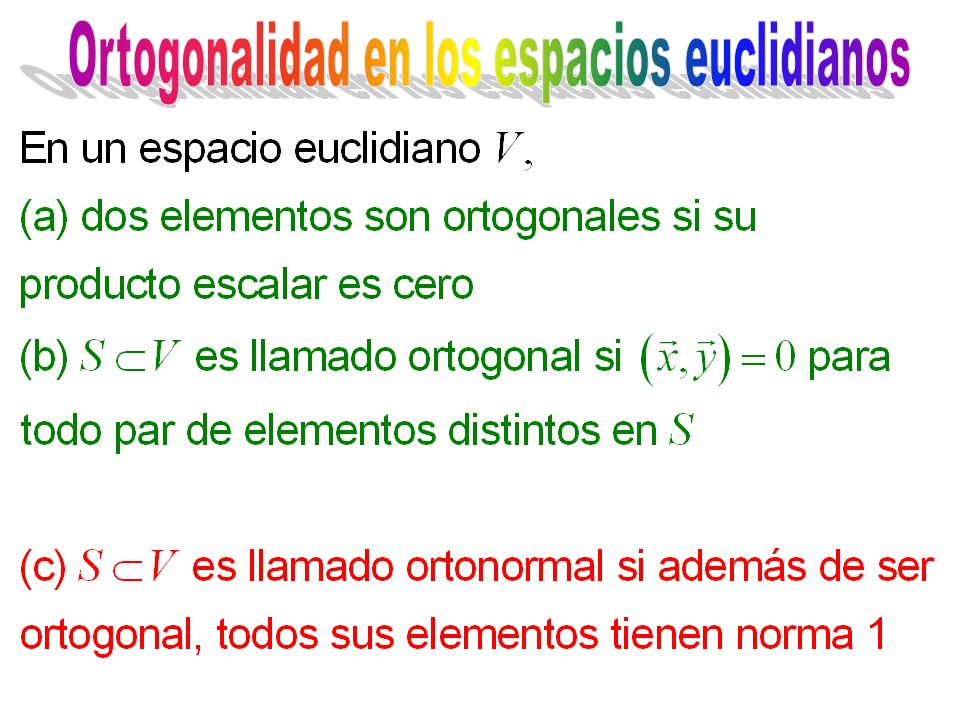
Un espacio vectorial real que tiene definido un producto escalar es llamado ESPACIO EUCLIDIANO REAL

427
Un espacio vectorial complejo que tiene definido un producto escalar es llamado ESPACIO EUCLIDIANO COMPLEJO O ESPACIO UNITARIO

428
Normalmente se dice ESPACIO EUCLIDIANO y punto, independientemente del campo sobre el cual esté definido.

433
Hasta aquí llegue el martes 5 de octubre del 2010 después de CUATRO clases de 1:30 horas

434
Quinta clase martes 12 de octubre del 2010 de 12:30 a 14:00

436
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

437
Repaso de la quinta clase martes 12 de octubre del 2010 de 12:30 a 14:00

441
FIN del repaso de la quinta clase martes 12 de octubre del 2010 de 12:30 a 14:00

474
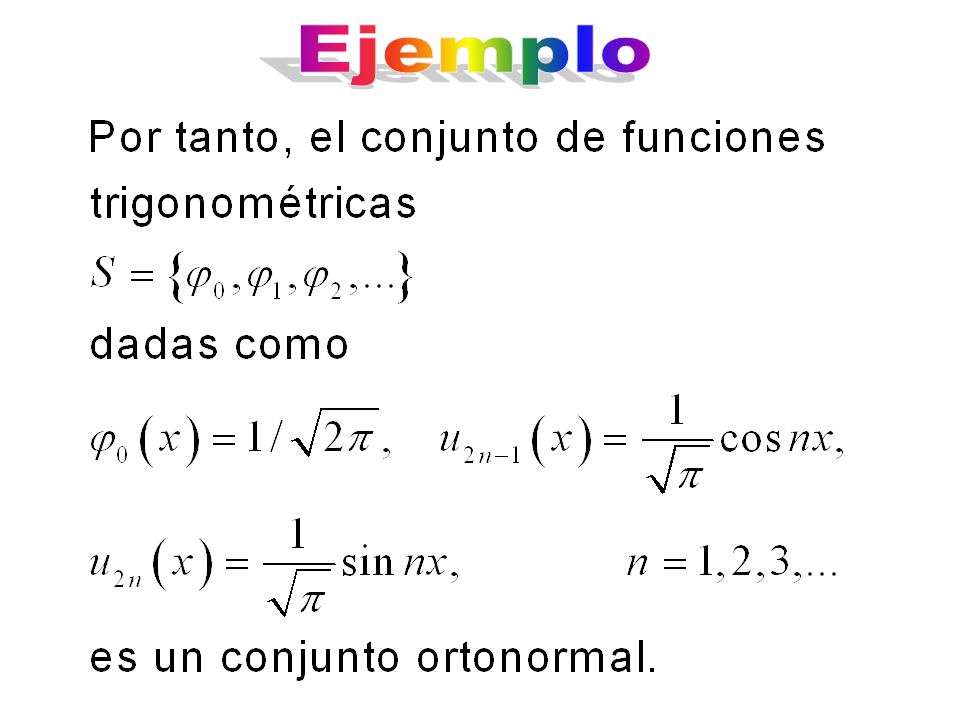
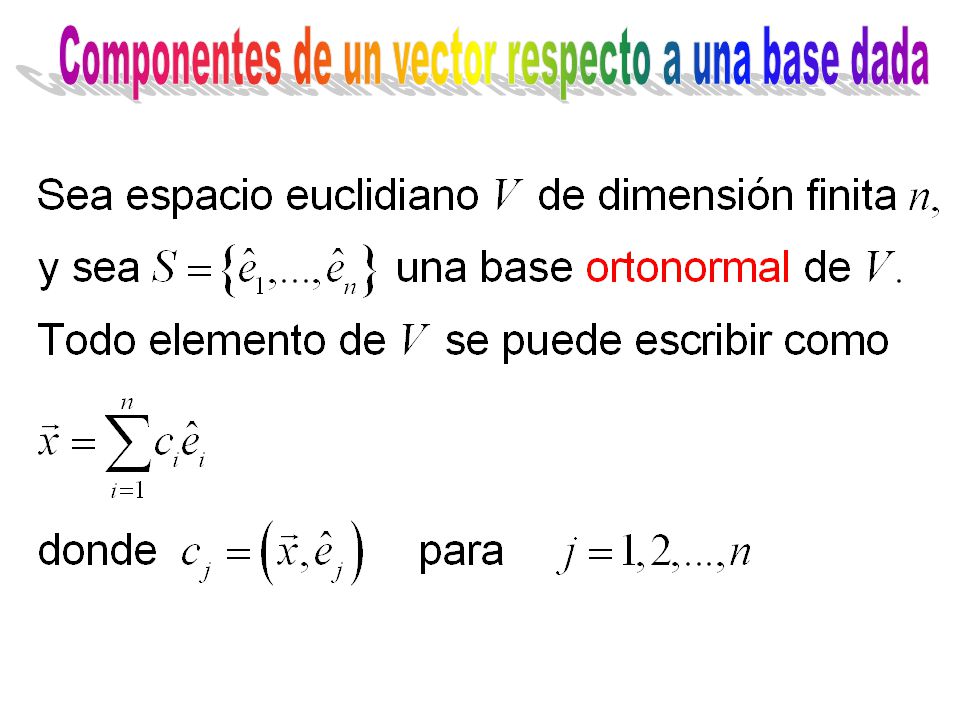
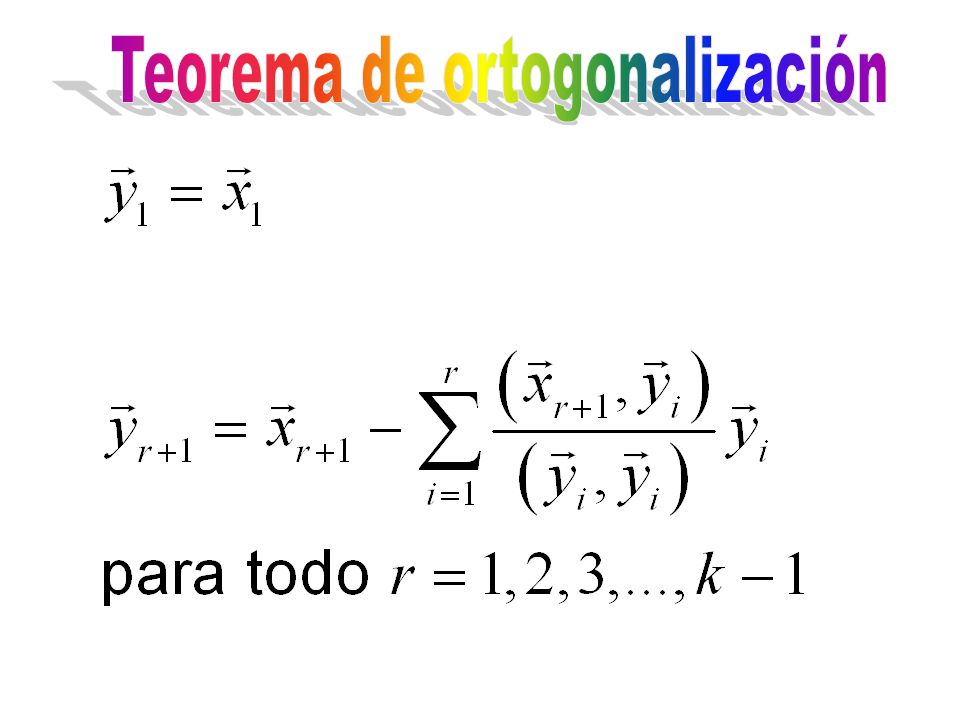
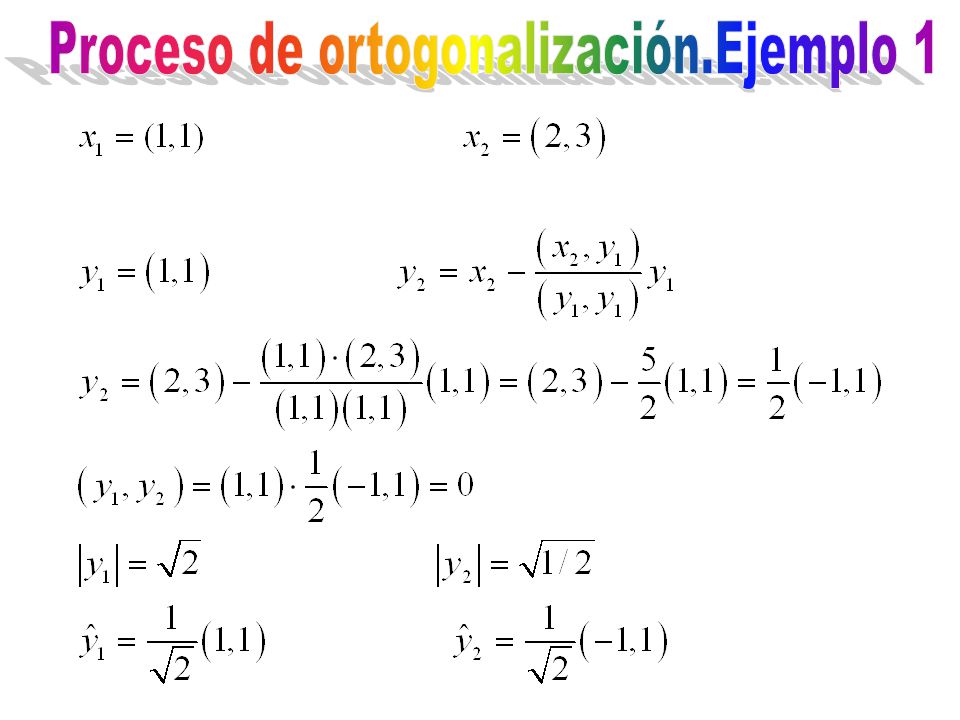
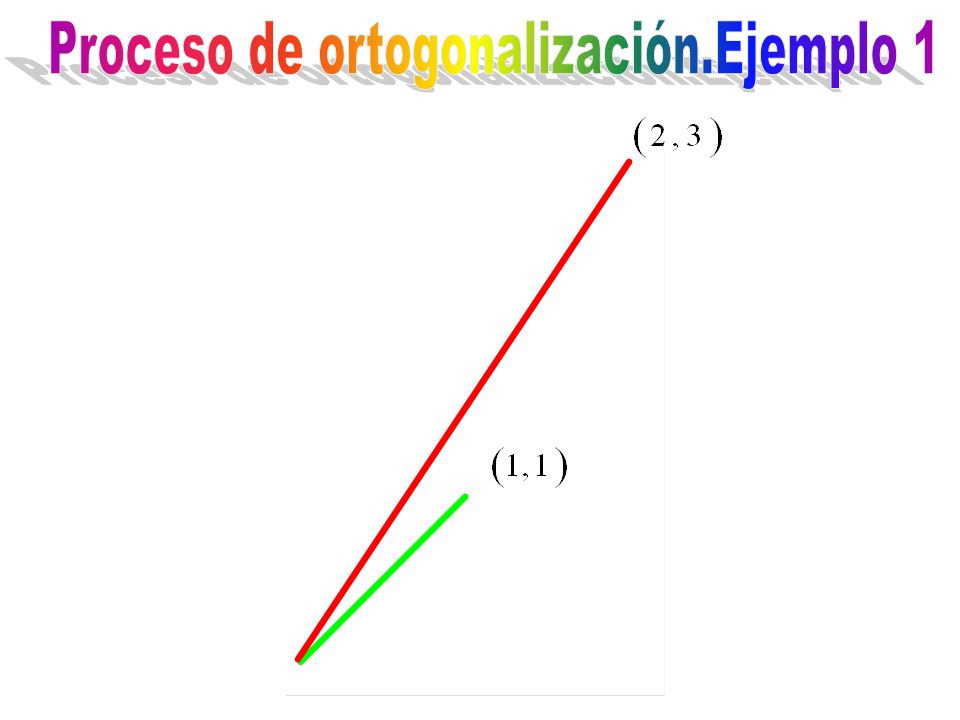
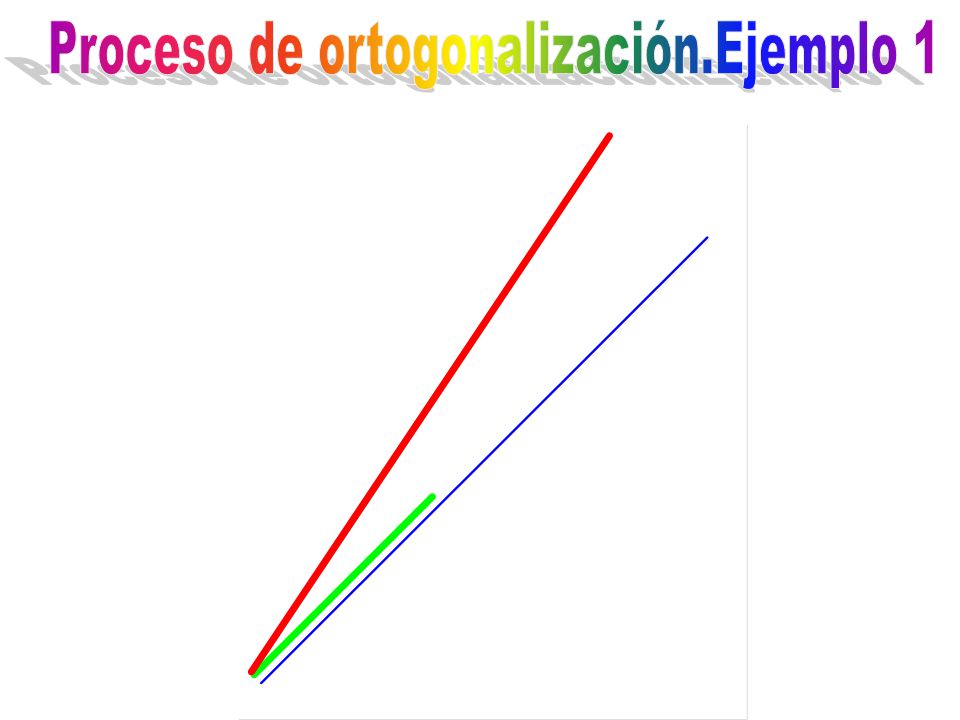
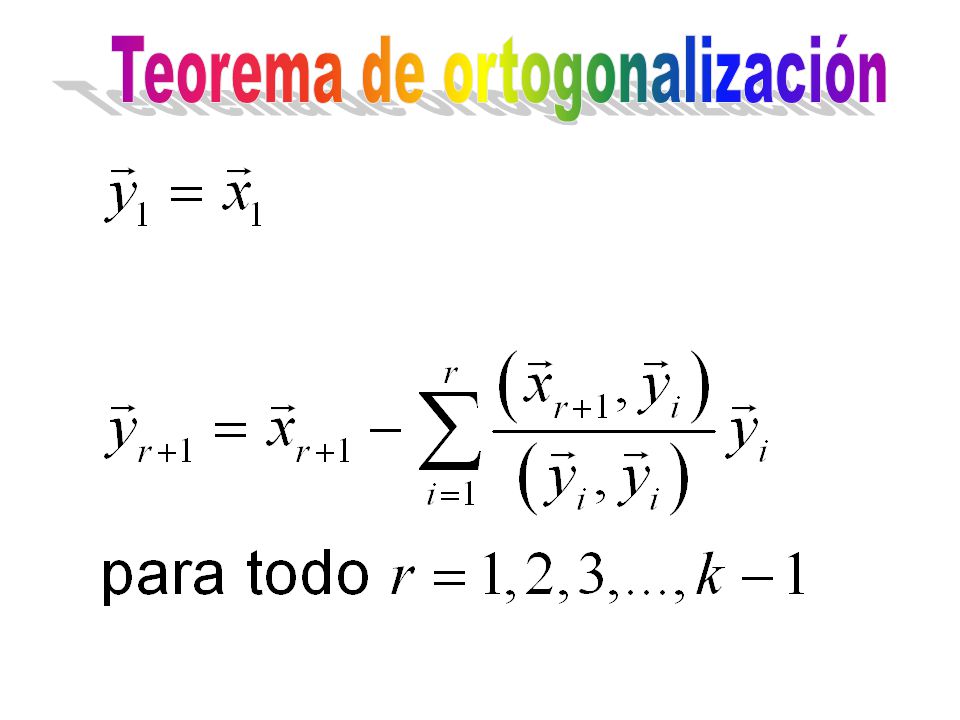
Una base ortonormal de un espacio vectorial es un conjunto de vectores ortonormales, que genera el espacio.

495
Hasta aquí llegue el martes 12 de octubre del 2010 después de CINCO clases de 1:30 horas

496
Sexta clase martes 26 de octubre del 2010 de 12:30 a 14:00

498
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

499
Repaso de la sexta clase martes 26 de octubre del 2010 de 12:30 a 14:00

505
FIN del Repaso de la sexta clase martes 26 de octubre del 2010 de 12:30 a 14:00

512
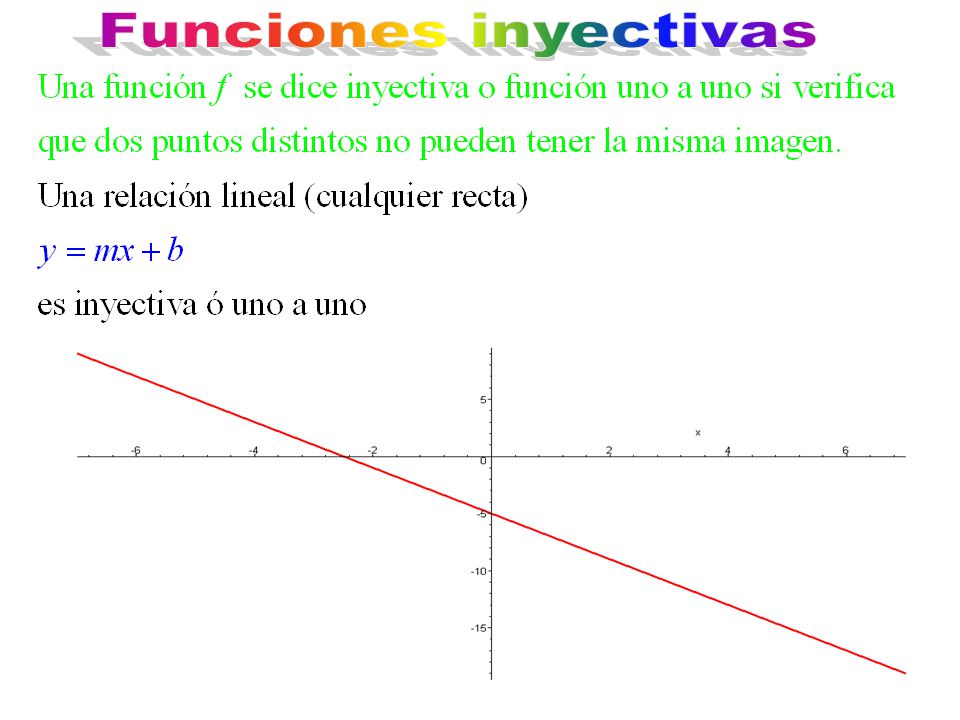
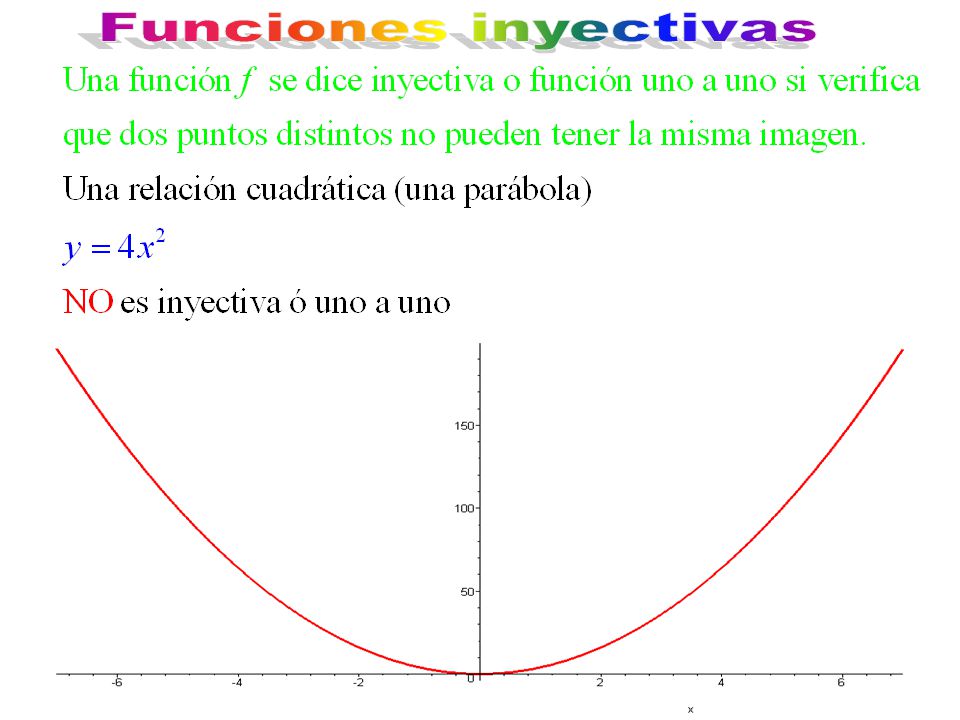
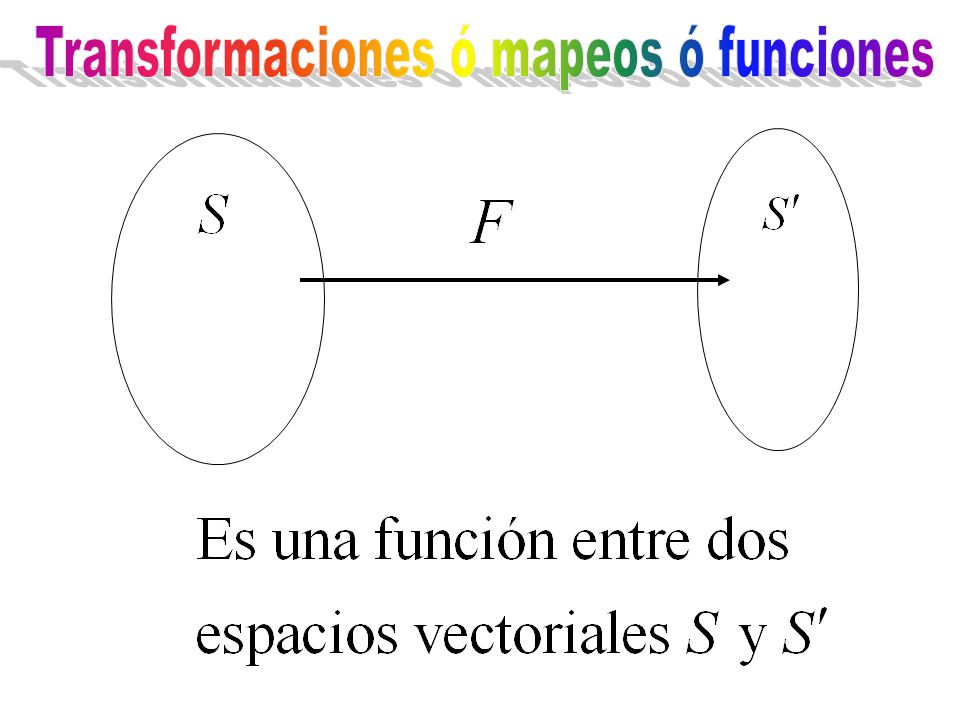
De manera intuitiva podemos decir que una función es una relación entre dos magnitudes, de tal manera que a cada valor de la primera le corresponde un único valor de la segunda.

513
Conjunto de seres humanos

515
A cada ser humano se le asocia su padre biológico Conjunto de seres humanos

516
A cada ser humano se le asocia su padre biológico Todo elemento del dominio tiene asociado un único elemento del contradominio. Todo ser humano tiene un único padre biológico No todo elemento del contradominio tiene asociado un elemento del dominio. No todo ser humano es un padre biológico Conjunto de seres humanos

518
Todos los elementos del dominio tiene que tener asociado un elemento del contradominio A un elemento del dominio se le asociara un único elemento del contradominio Elementos del contradominio pueden tener asociados más de un elemento del dominio

520
a b c d e

521
a b c d e Dominio

522
a b c d e Codominio

523
a b c d e Dominio Codominio Rango

525
A la calabaza se le asocian dos elementos en el contradominio

526
A parcial nabla raiz existe B

527
A parcial nabla raiz existe B

528
Definimos una función de x en y como toda aplicación (regla, criterio perfectamente definido), que a un número x (variable independiente), le hace corresponder un número y (y solo uno llamado variable dependiente).
, que a un número x (variable independiente), le hace corresponder un número y (y solo uno llamado variable dependiente).")
529
Se llama función real de variable real a toda aplicación f de un subconjunto no vacío D de R en R Una función real está definida, en general, por una ley o criterio que se puede expresar por una fórmula matemática. La variable x recibe el nombre de variable independiente y la y ó f(x) variable dependiente o imagen.
 variable dependiente o imagen..")
531
Una función real de una variable real es una función cuyo dominio es un subconjunto de los números reales y su contradominio son los números reales. Su rango es también un subconjunto de los reales.

532
El subconjunto D de números reales que tienen imagen se llama Dominio de definición de la función f y se representa D(f). Nota El dominio de una función puede estar limitado por: 1.- Por el propio significado y naturaleza del problema que representa. 2.- Por la expresión algebraica que define el criterio.

534
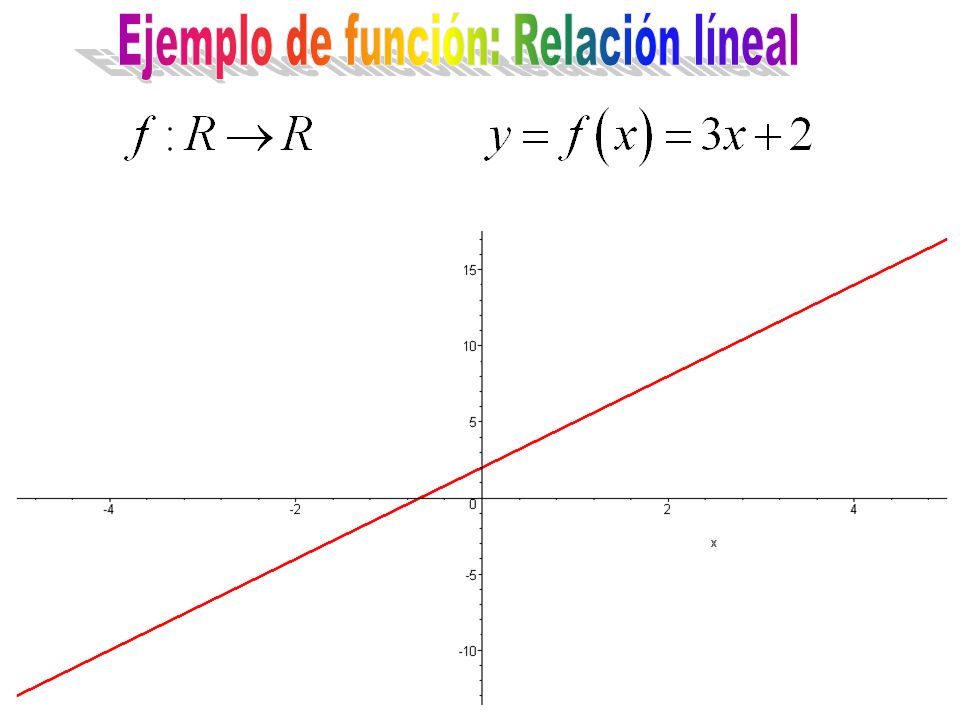
xf(x) 02 15 28 -2-4 311 -3-7 414 -4-10 517 -5-13 xf(x) 0.102.30 1.767.28 -3.45-8.35 8.9728.91 2.349.02 13.3341.99 1.416.23 16.7752.31 -44.44-131.32 0.012.03 -123.00-367.00
 xf(x)")
536
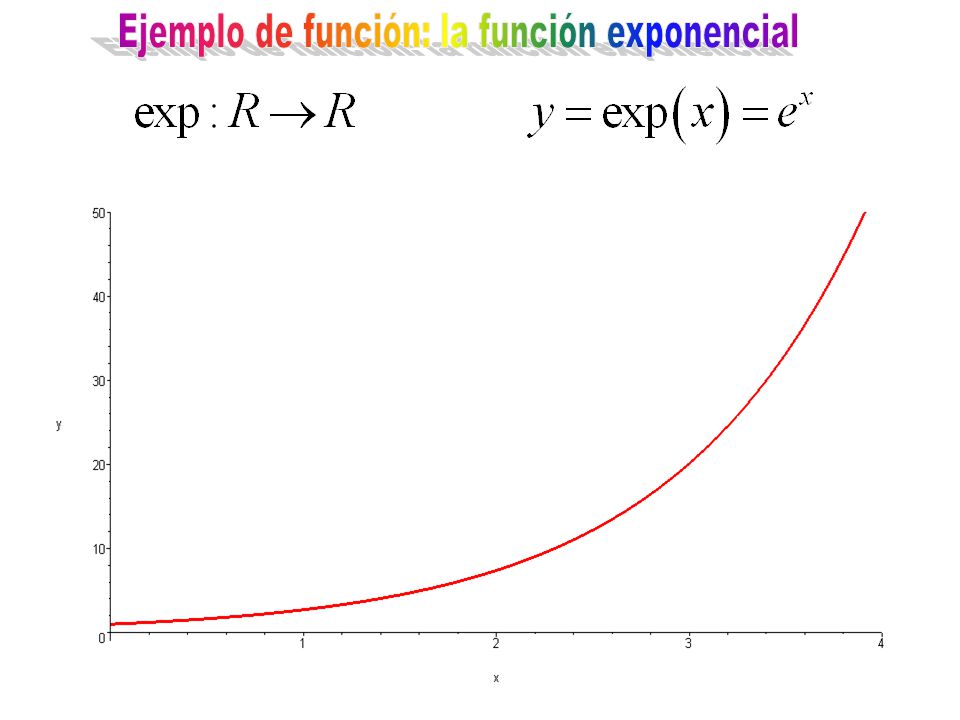
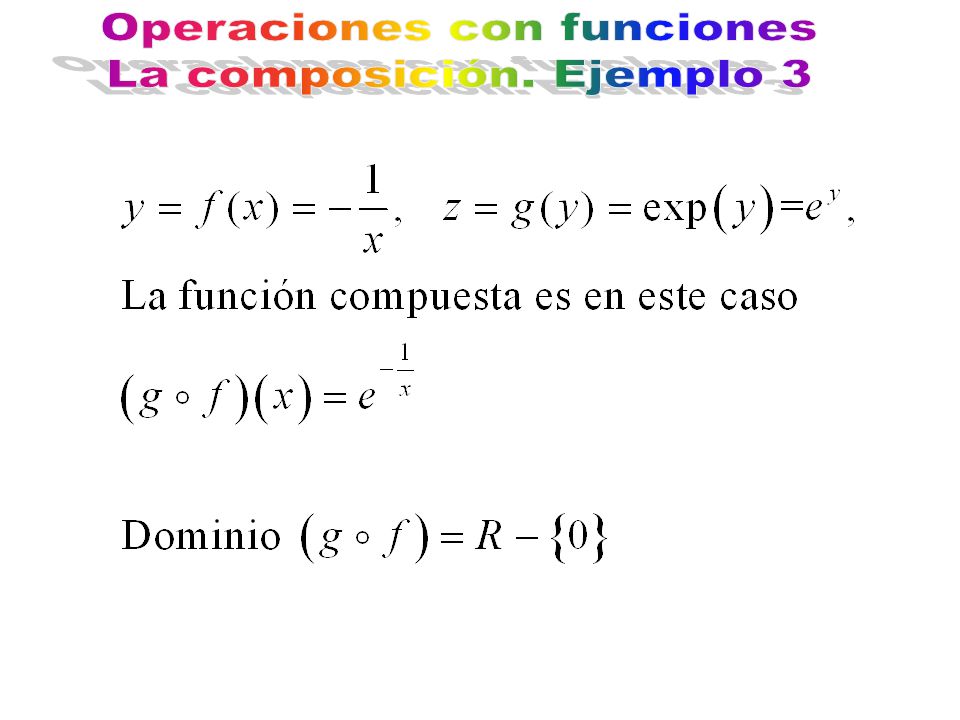
xf(x) 0.101.1051709 11.88144,350.5506832 -3.450.0317456 8.977,863.6016055 2.3410.3812366 13.33615,382.9278900 6.991,085.7214762 -91.230.0000000 2.229.2073309 0.501.6487213 -12.450.0000039 xf(x) 0.001.000 1.002.718 0.368 2.007.389 -2.000.135 3.0020.086 -3.000.050 4.0054.598 -4.000.018 5.00148.413 -5.000.007
 , , , , xf(x)")
538
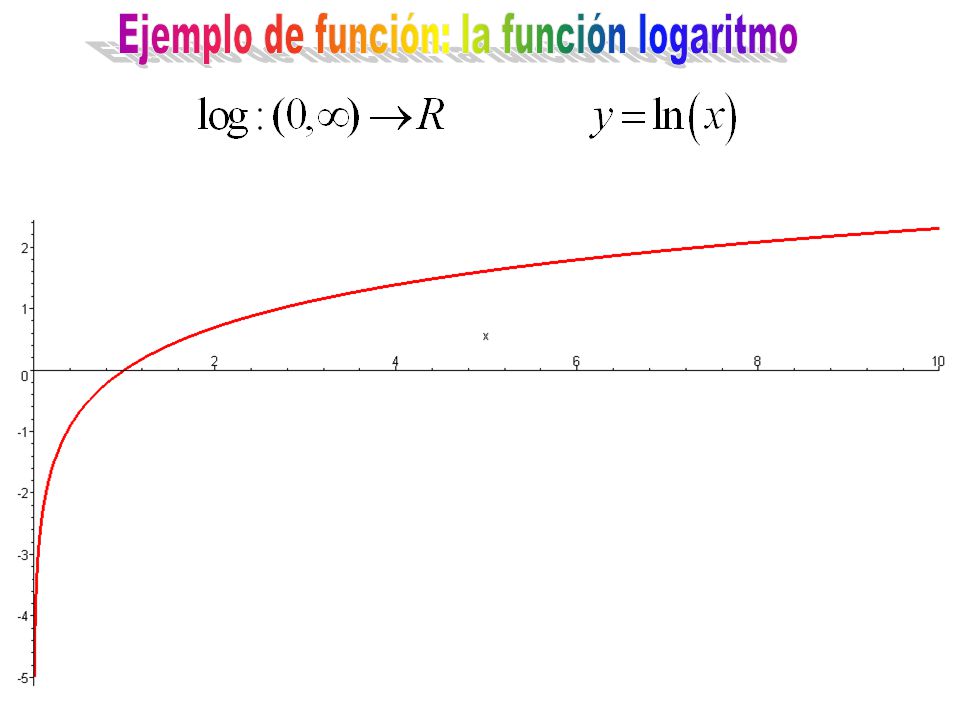
xln(x)x 0.10-2.3030.01-4.605 0.20-1.6090.02-3.912 0.30-1.2040.03-3.507 0.40-0.9160.04-3.219 0.50-0.6930.05-2.996 0.60-0.5110.06-2.813 0.70-0.3570.07-2.659 0.80-0.2230.08-2.526 0.90-0.1050.09-2.408 1.000.0000.10-2.303
x")
561
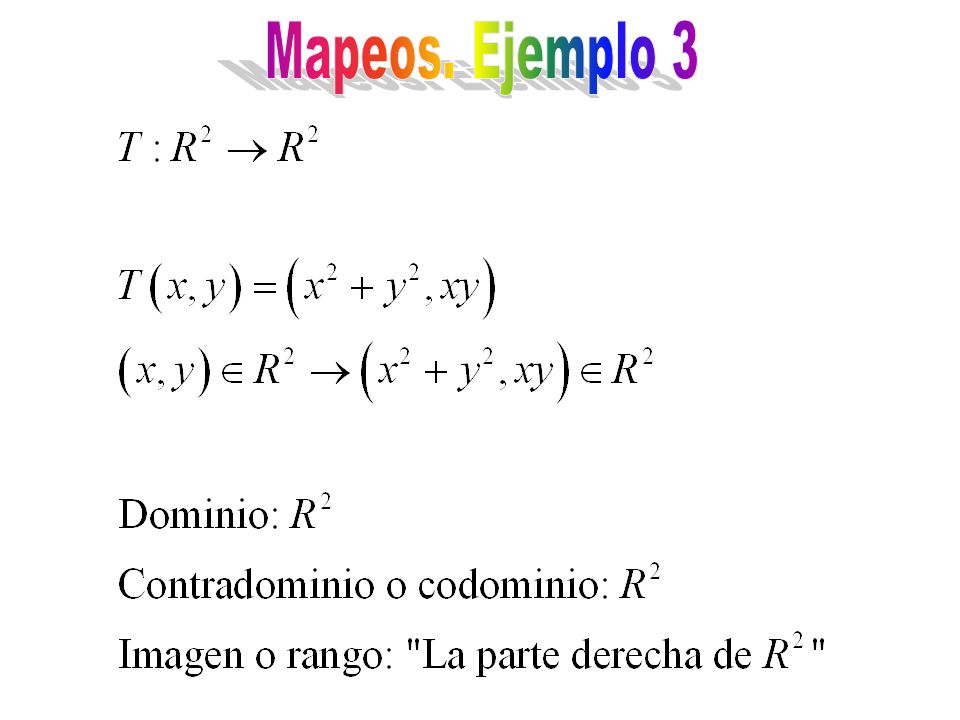
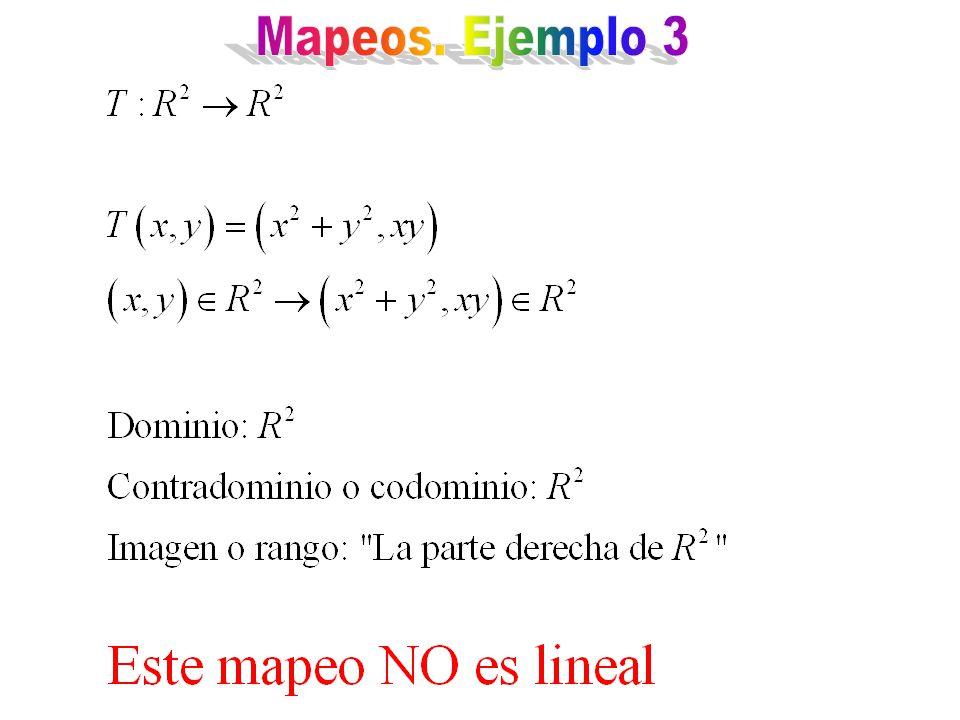
Dominio

562
Contradominio

563
Imagen o rango de S

599
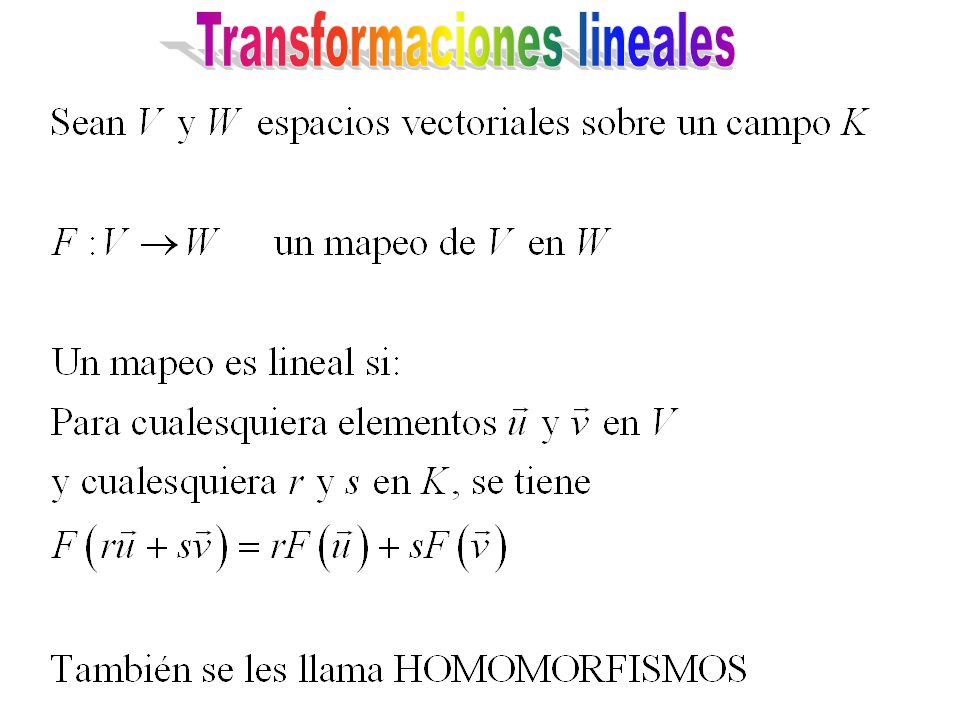
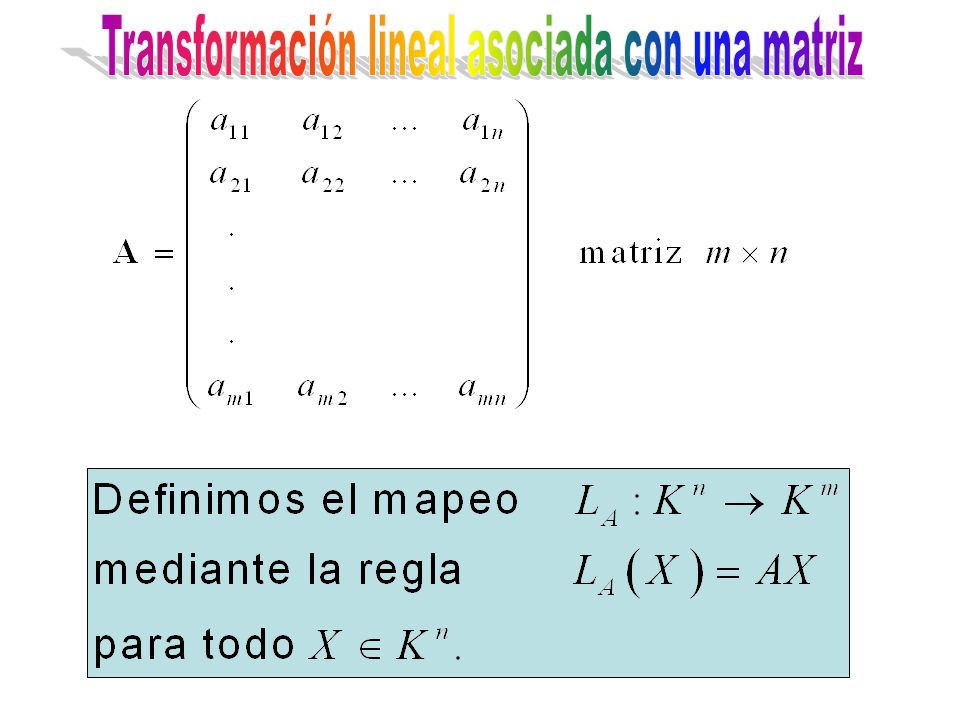
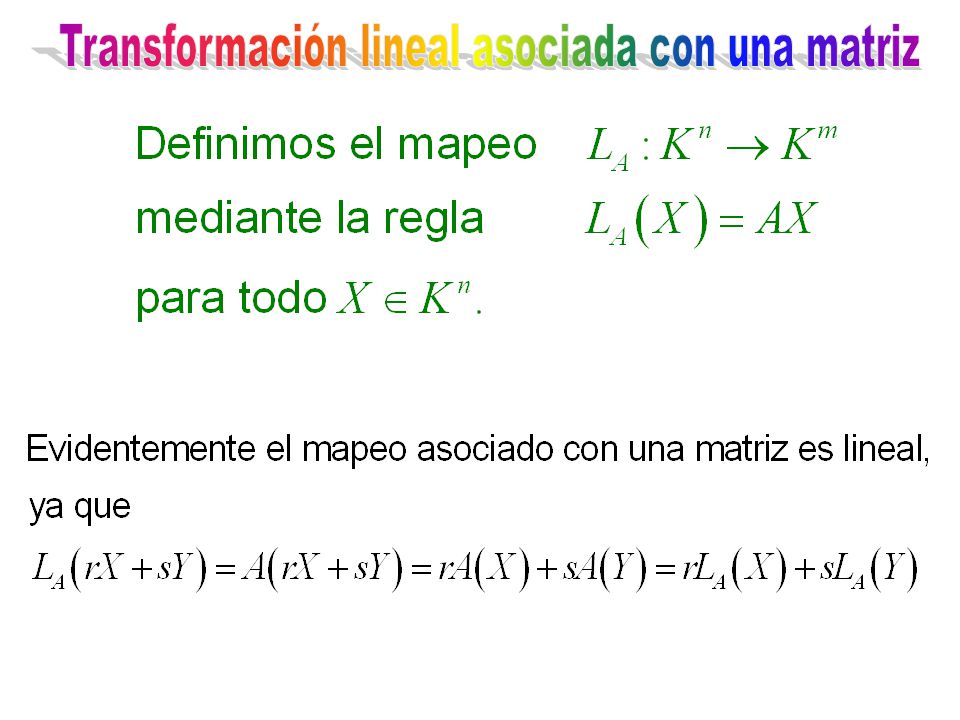
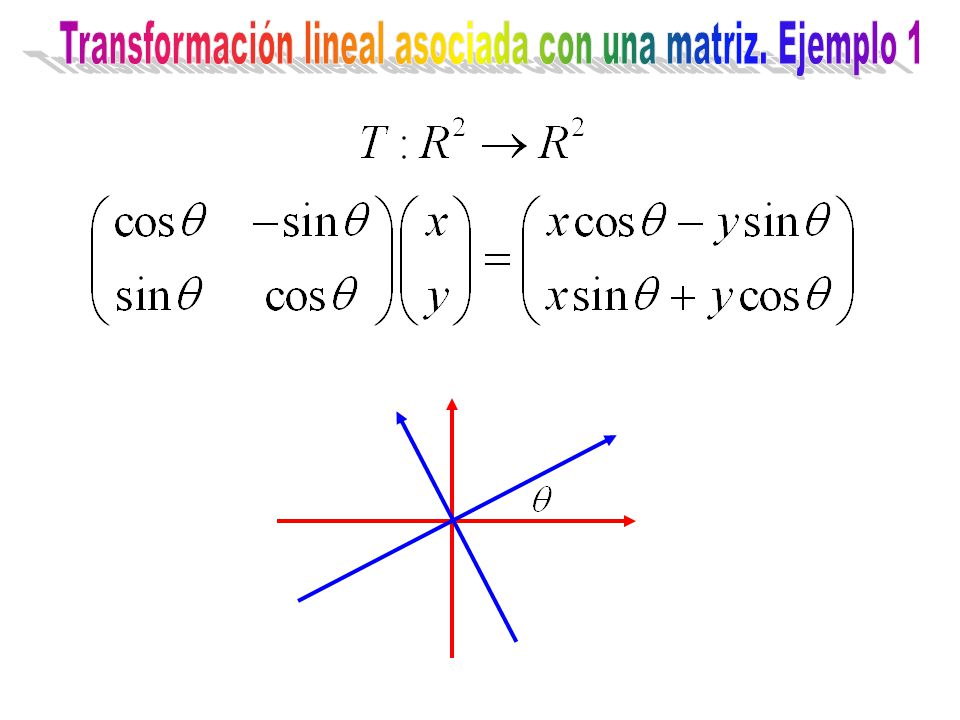
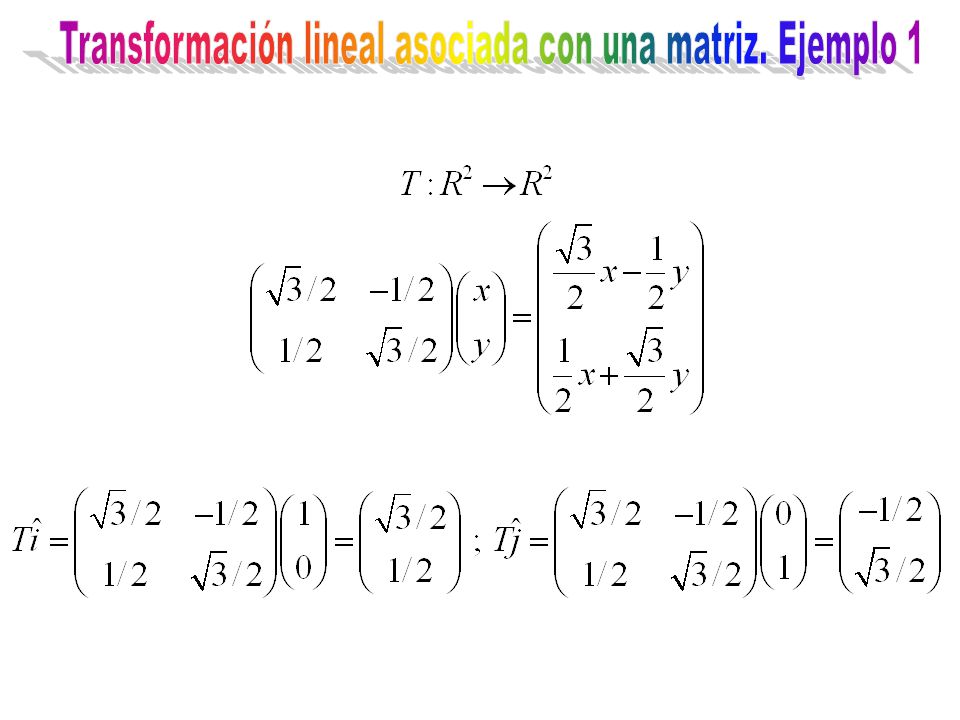
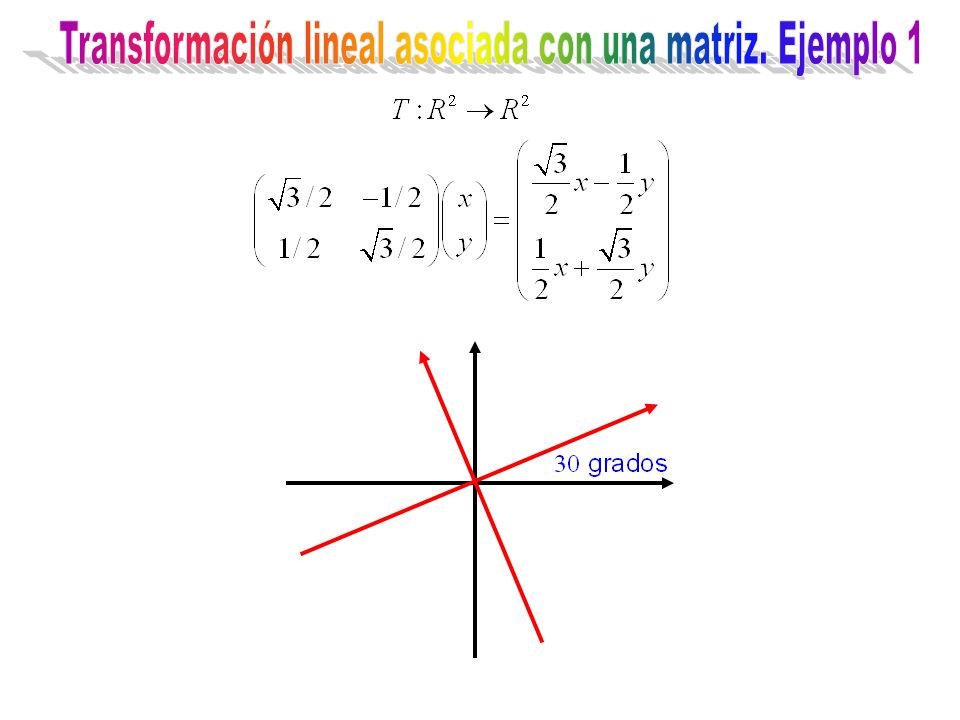
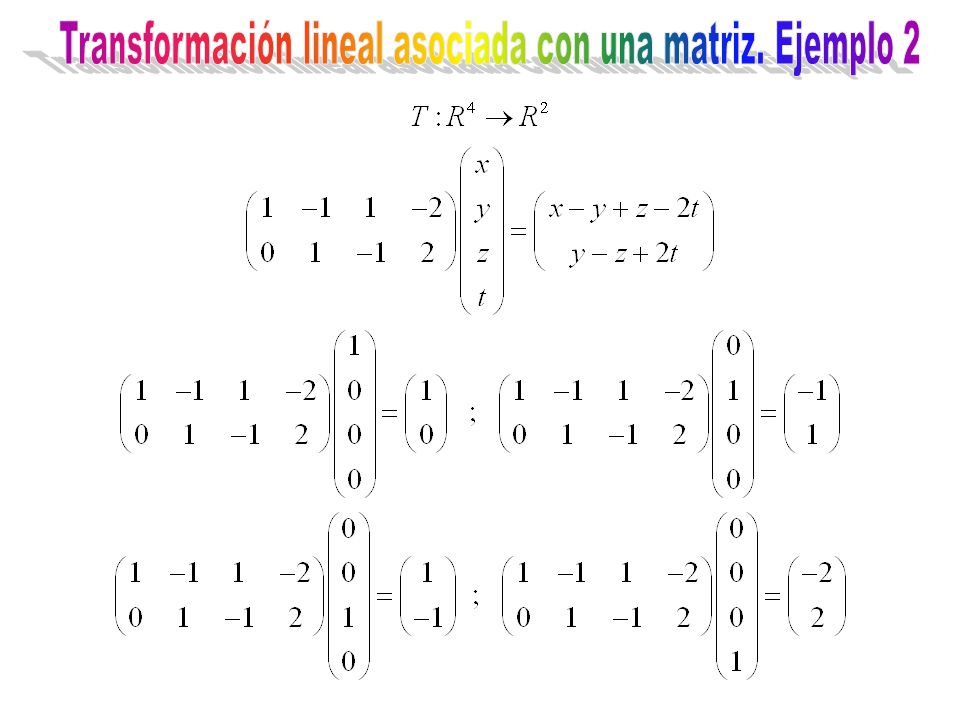
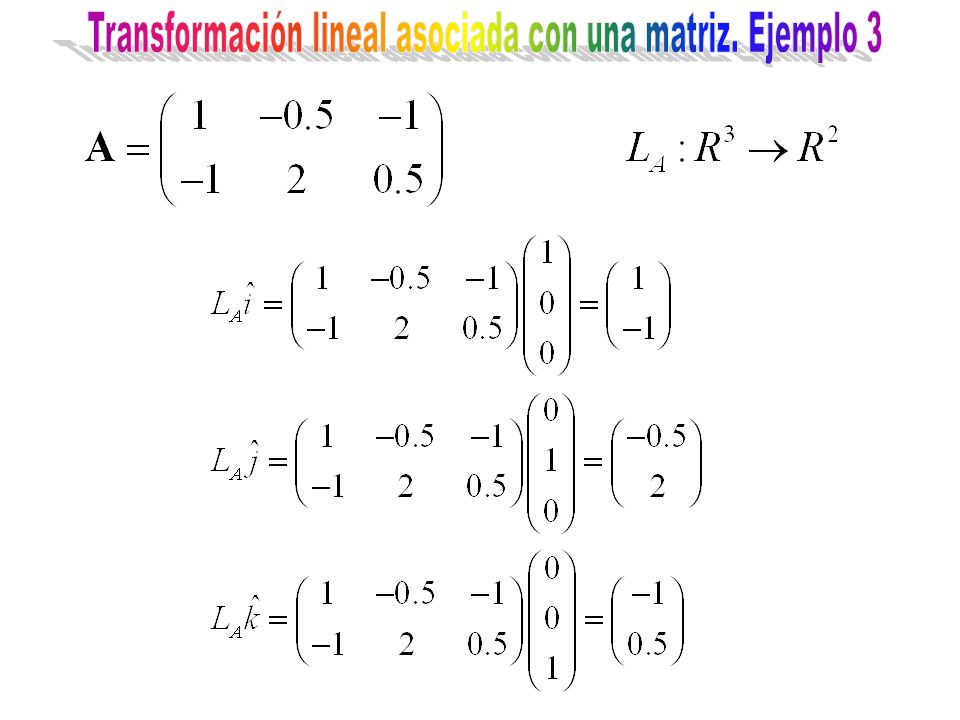
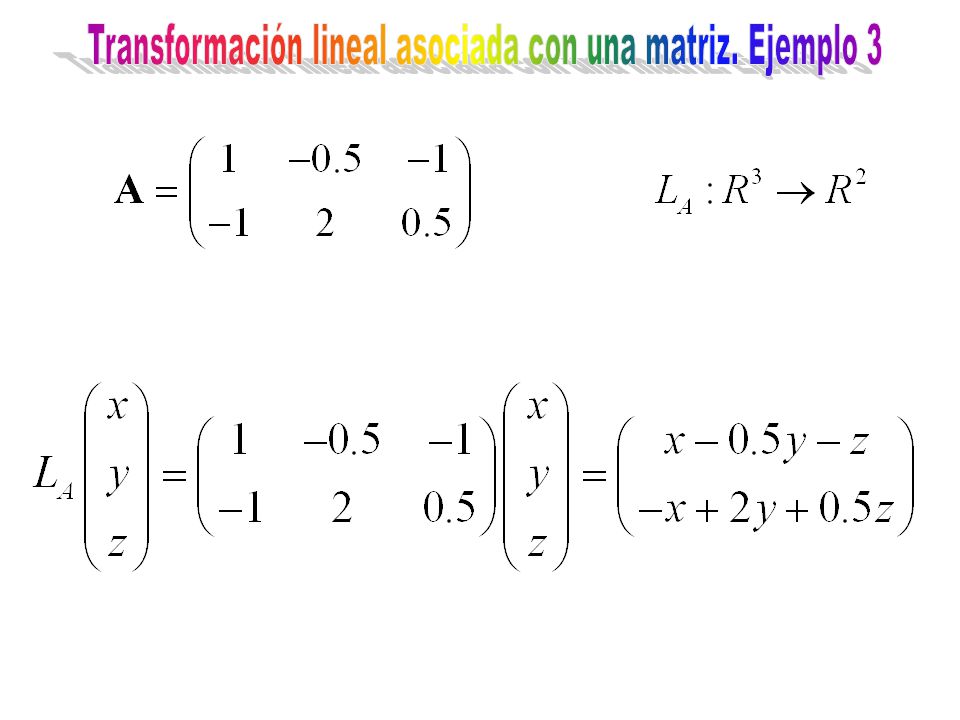
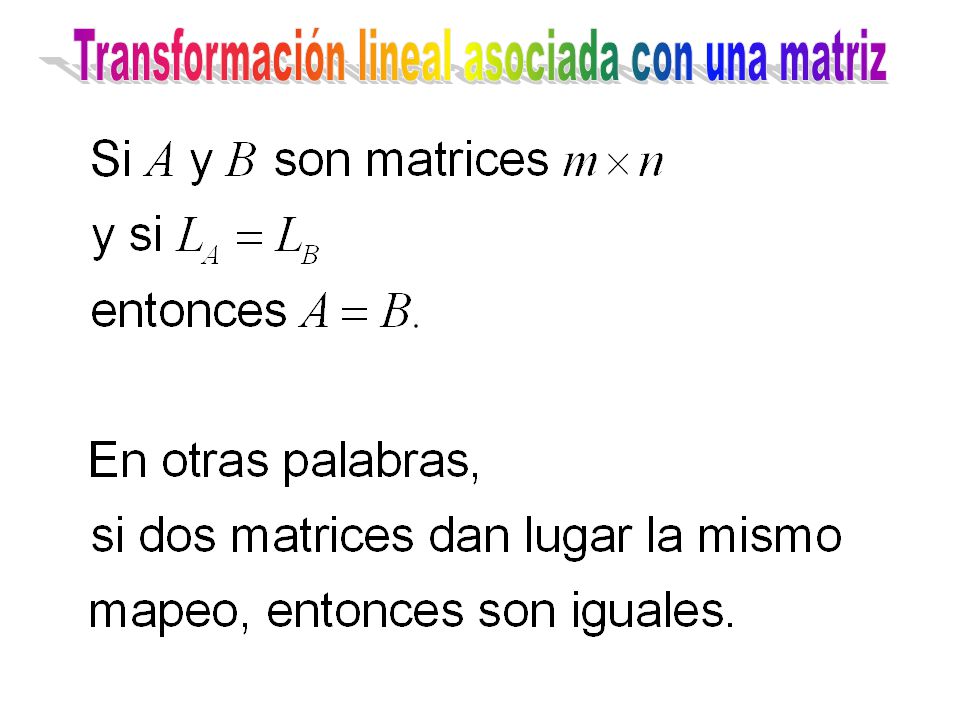
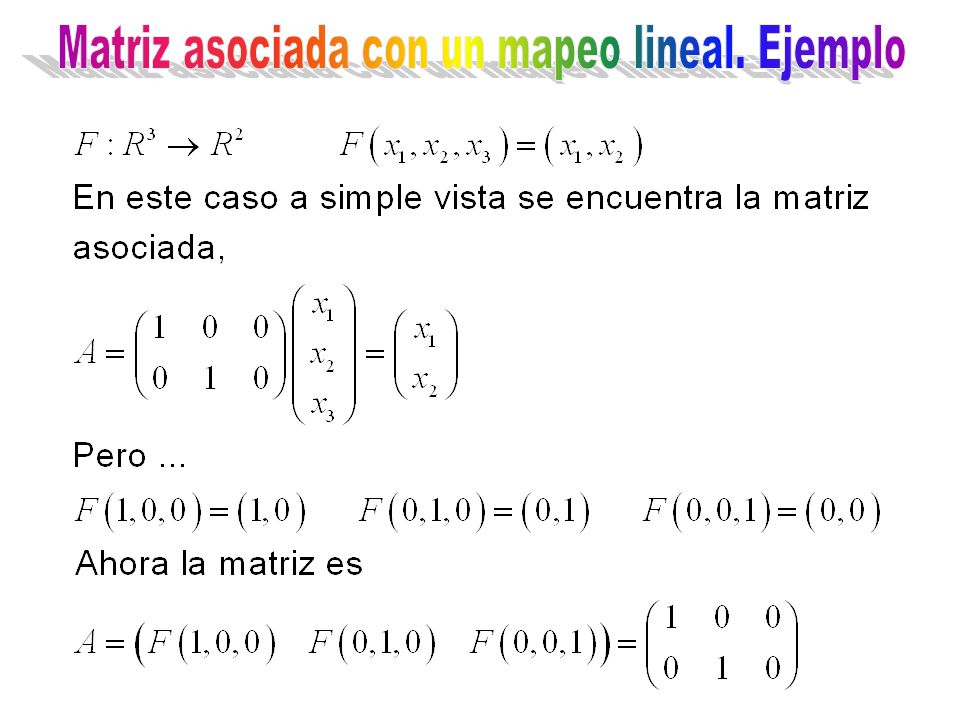
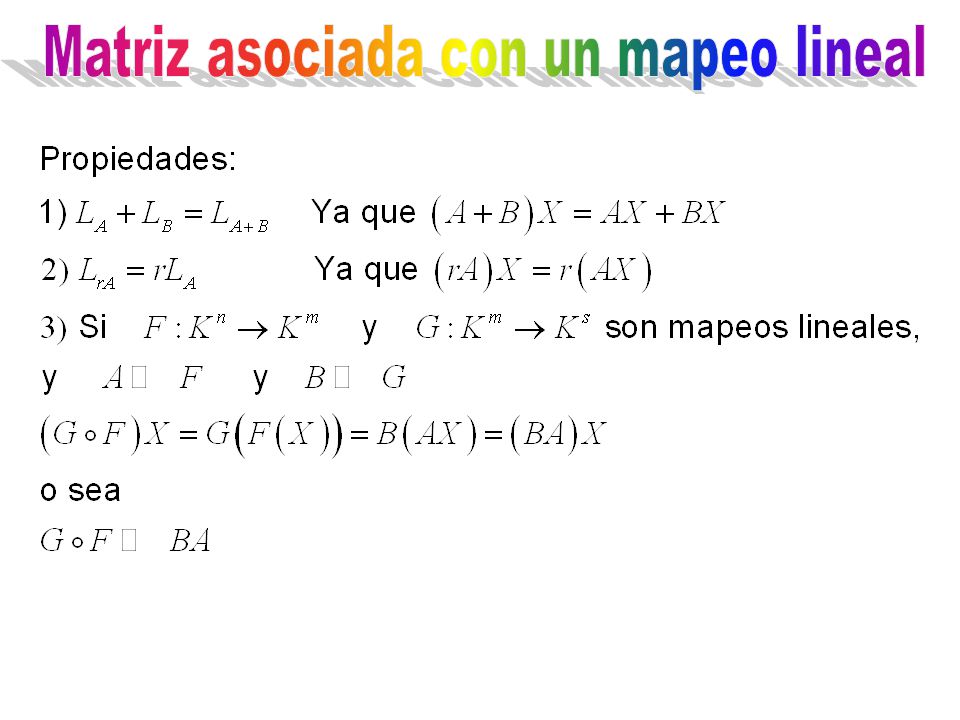
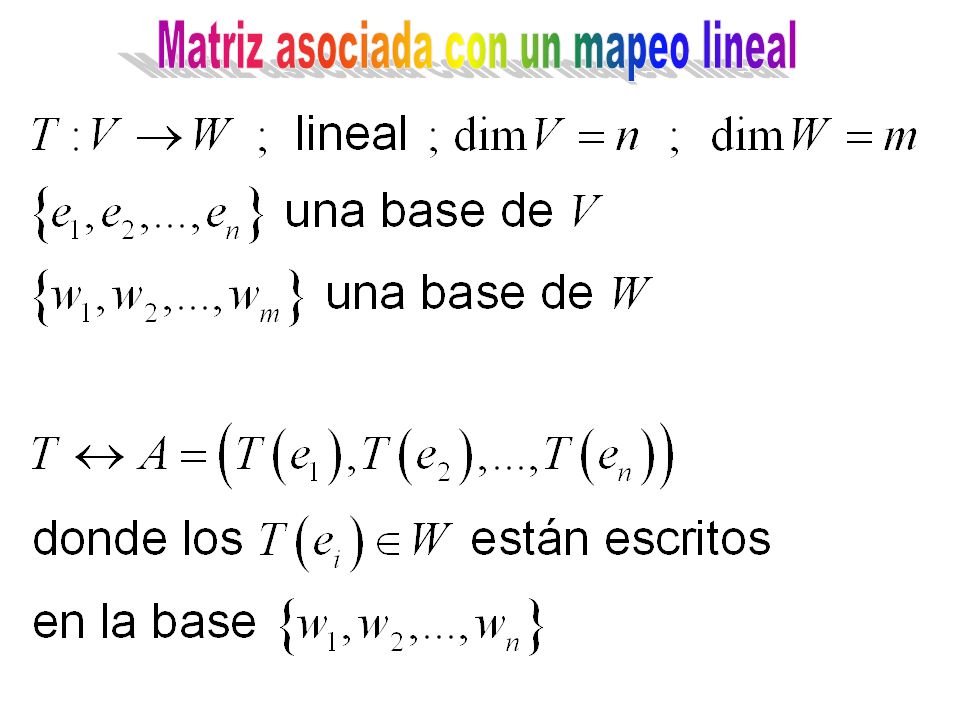
Transformaciones lineales Matrices

600
Toda matriz tiene asociada un mapeo lineal

611
Hasta aquí llegue el martes 26 de octubre del 2010 después de SEIS clases de 1:30 horas

612
Septima clase martes 9 de noviembre del 2010 de 12:30 a 14:00

614
1.Sistemas de ecuaciones lineales 2.Álgebra de matrices 3.Determinantes 4.Geometría de los vectores 5.Espacios vectoriales 6.Valores propios y diagonalización 7.Transformaciones lineales 8.Espacios euclidianos

615
Repaso de la séptima clase martes 9 de noviembre del 2010 de 12:30 a 14:00

619
Transformaciones lineales Matrices

620
Toda matriz tiene asociada un mapeo lineal

621
Repaso de la séptima clase martes 9 de noviembre del 2010 de 12:30 a 14:00

622
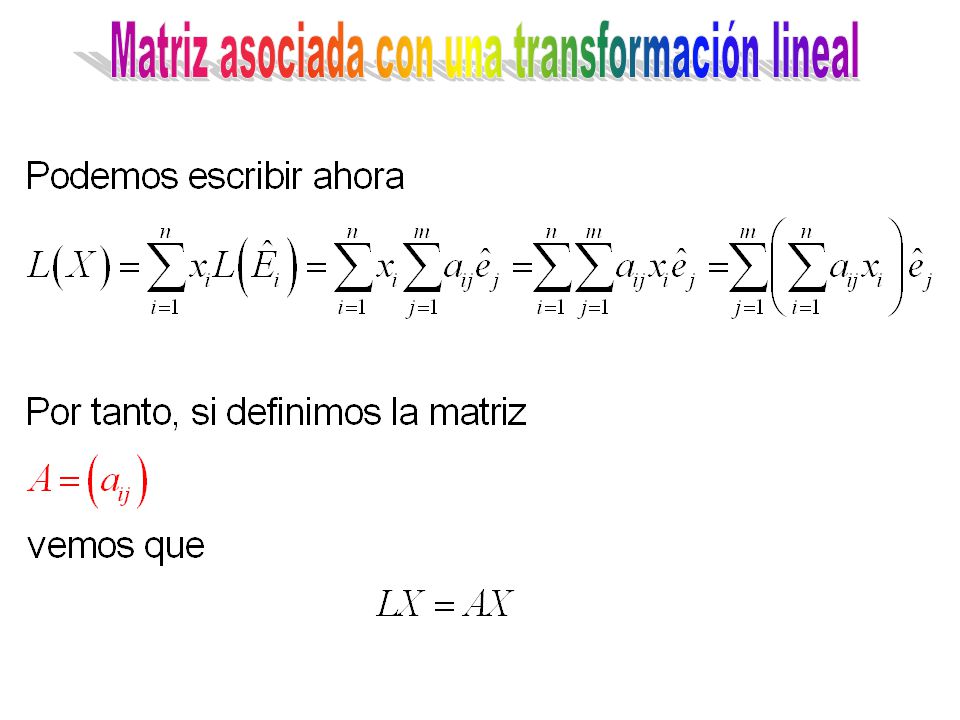
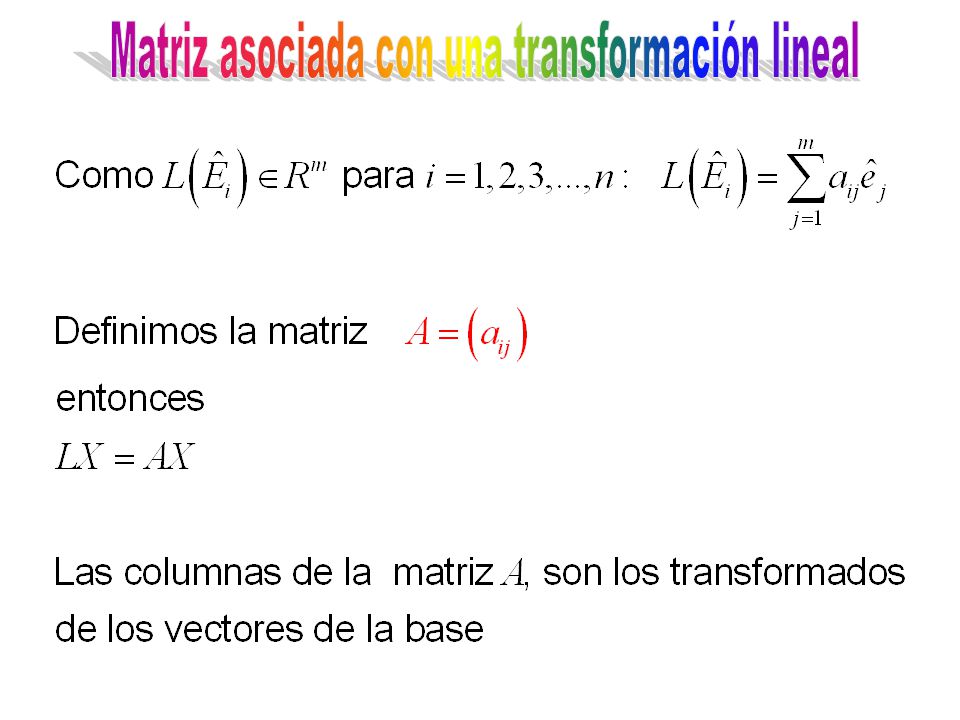
Transformaciones lineales Matrices

623
A todo mapeo lineal se le puede asociar una matriz

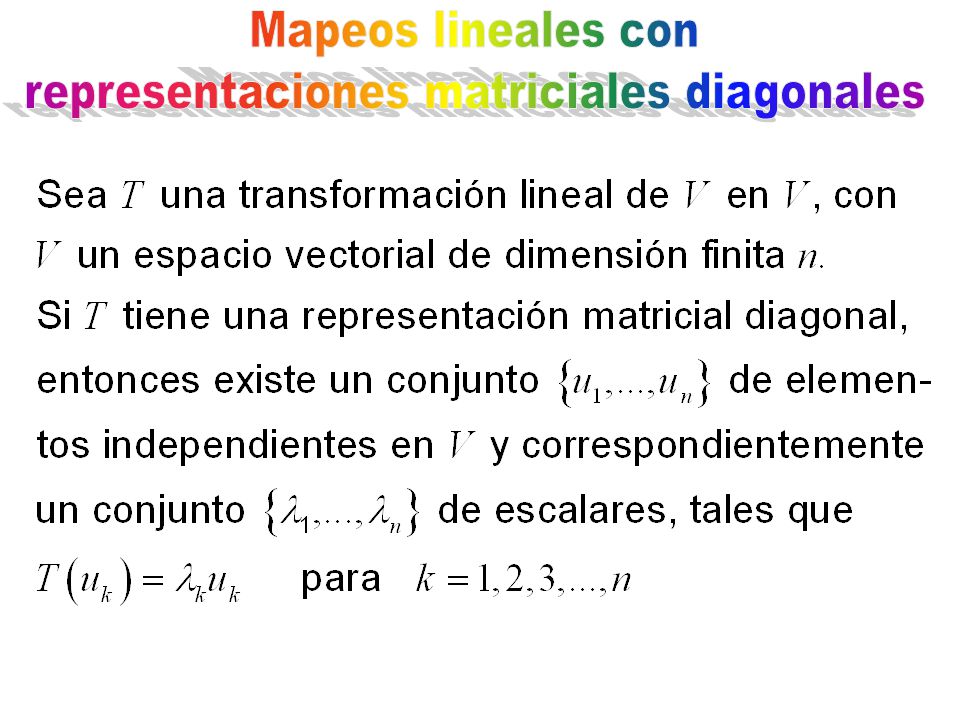
637
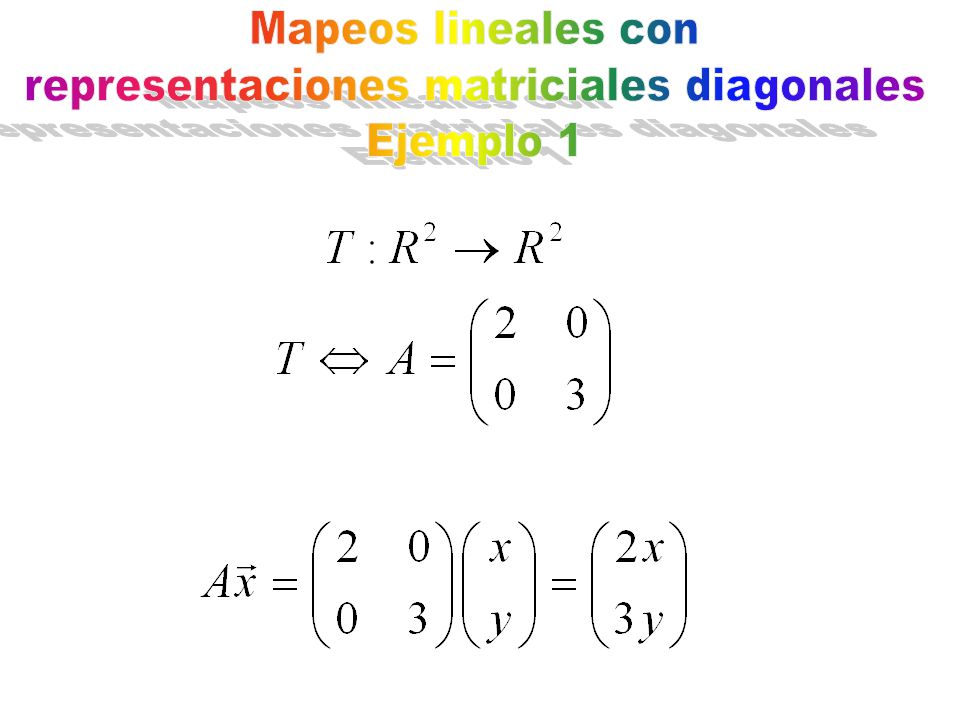
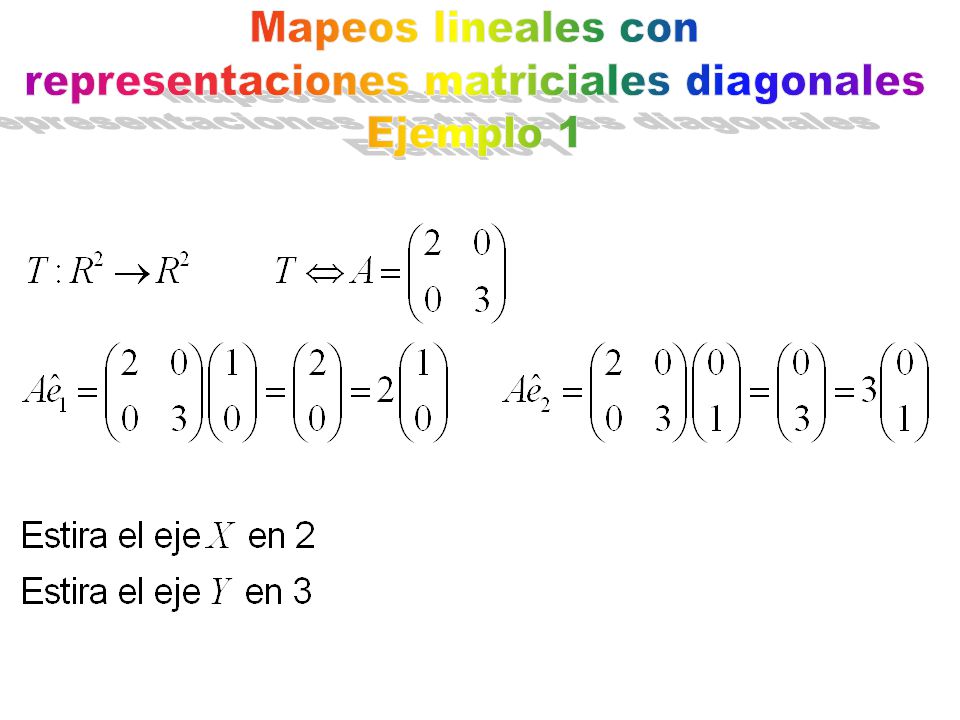
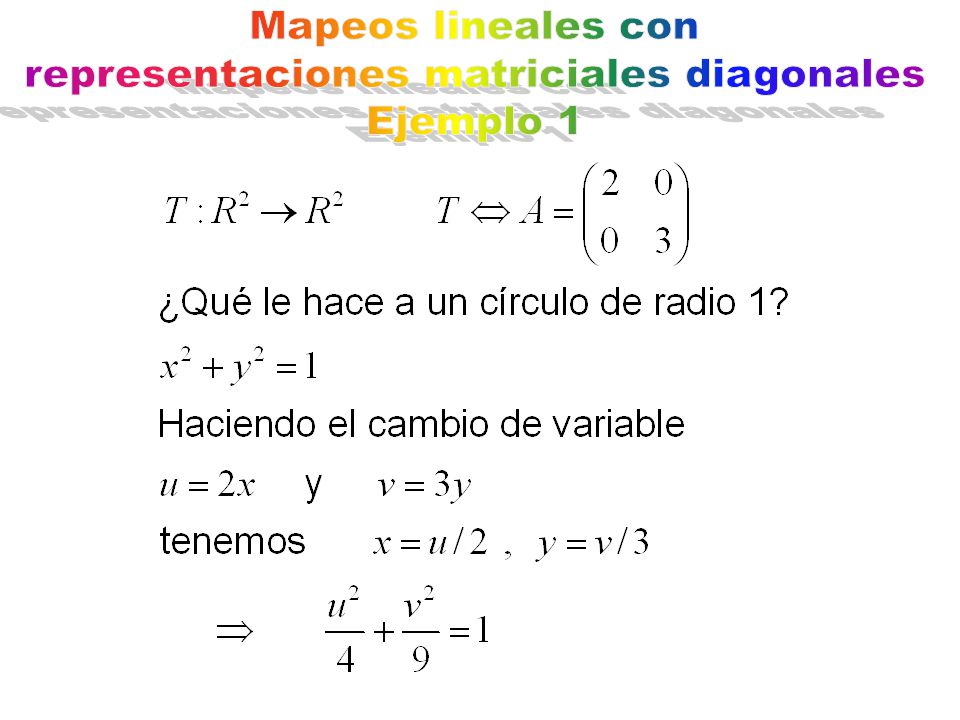
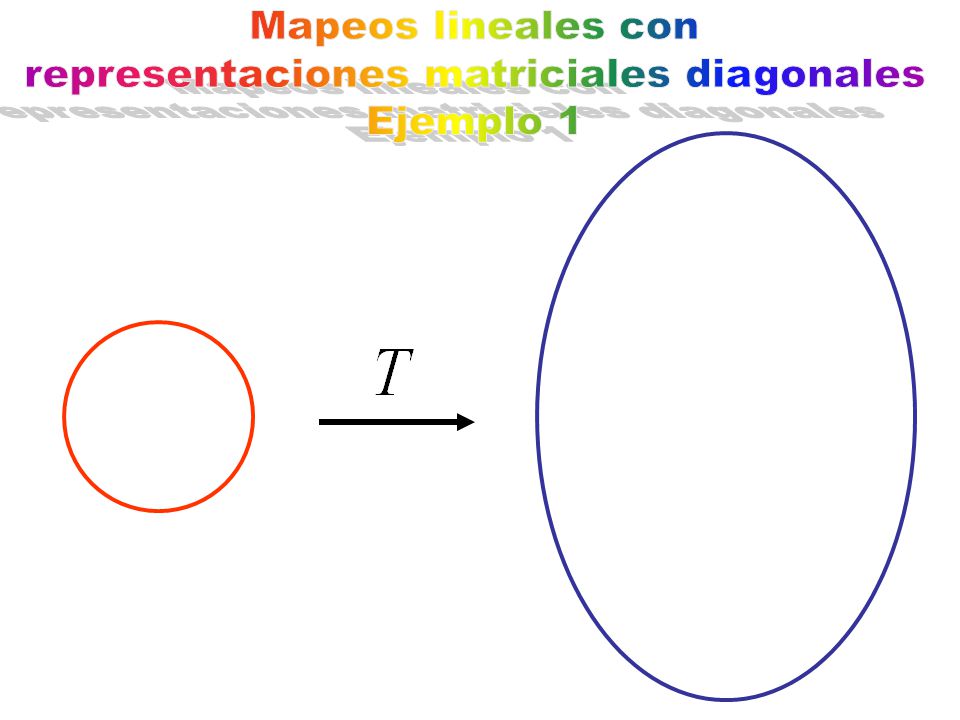
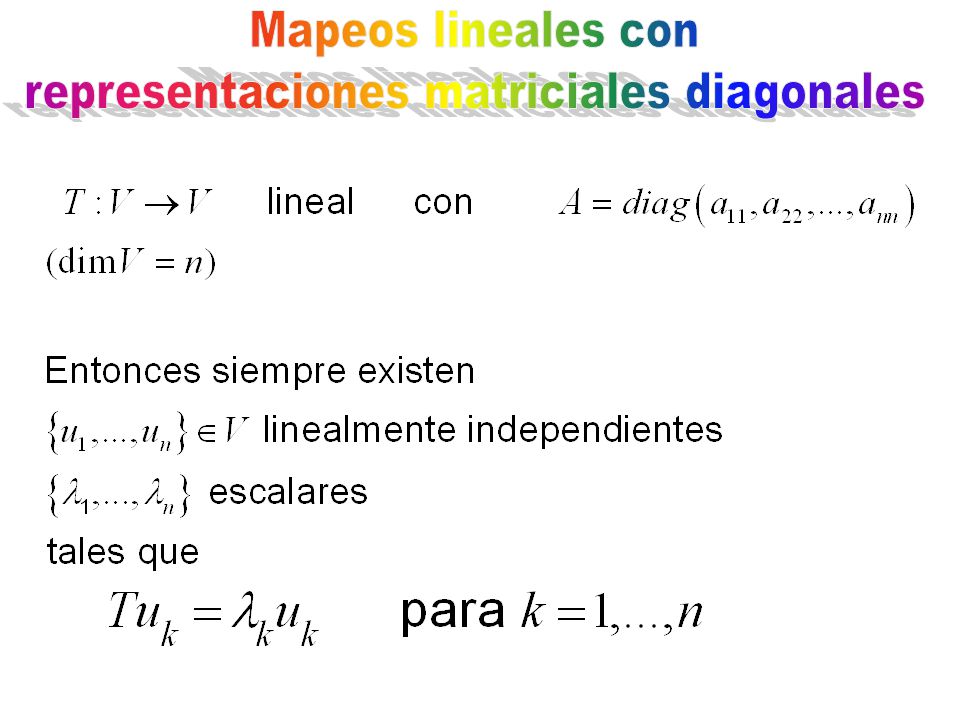
Se llaman propiedades intrínsecas a las que no dependen del sistema de coordenadas. Si la matriz asociada a la transformación lineal es diagonal, muchas de estas propiedades pueden ser descubiertas fácilmente.

694
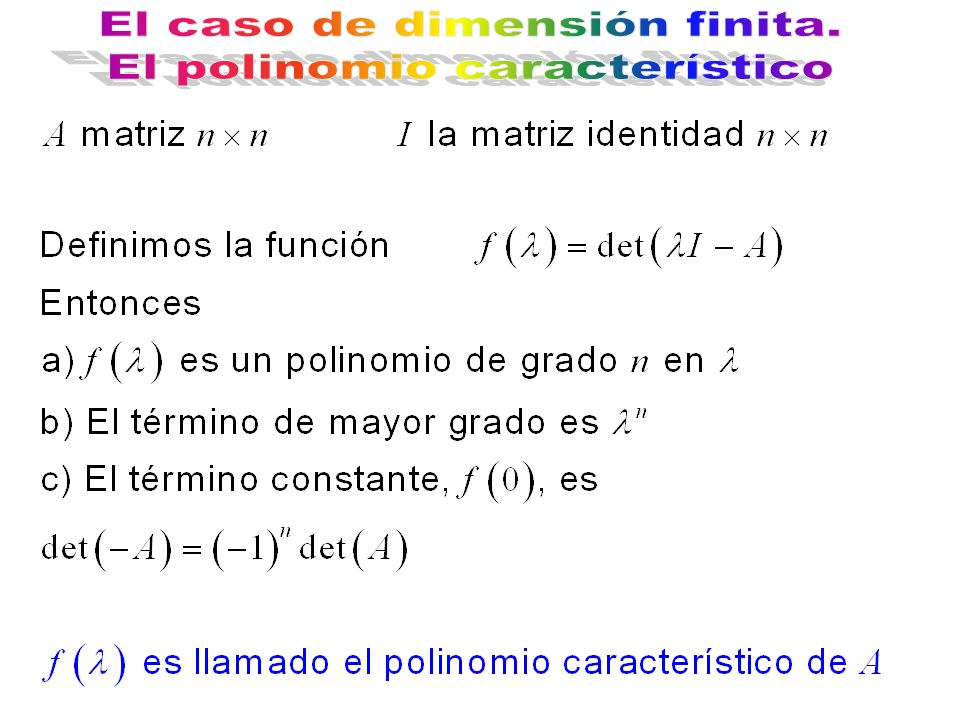
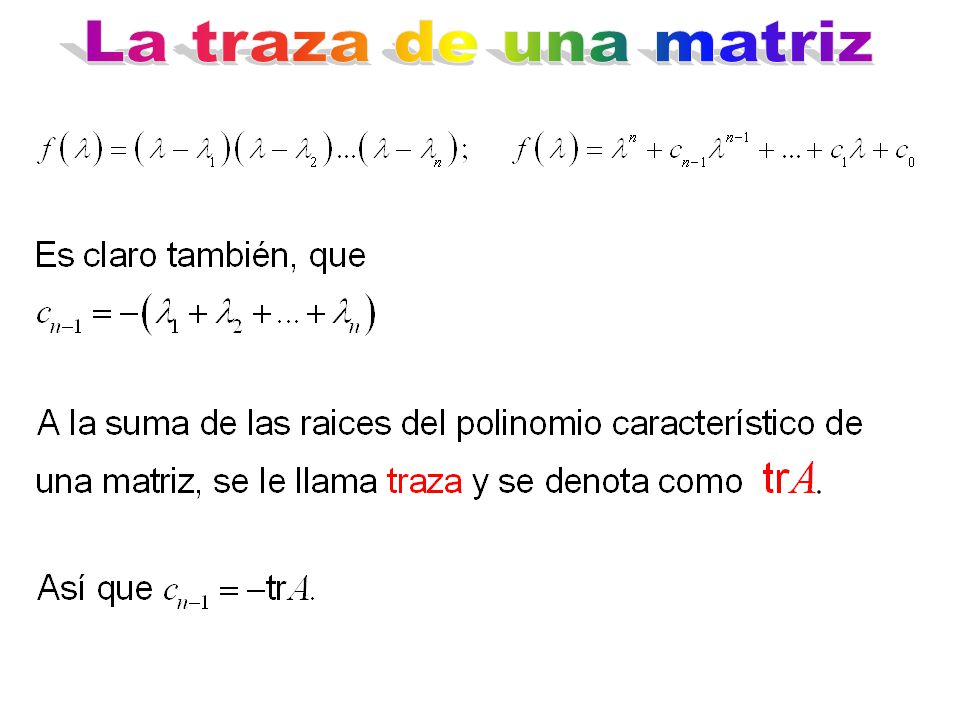
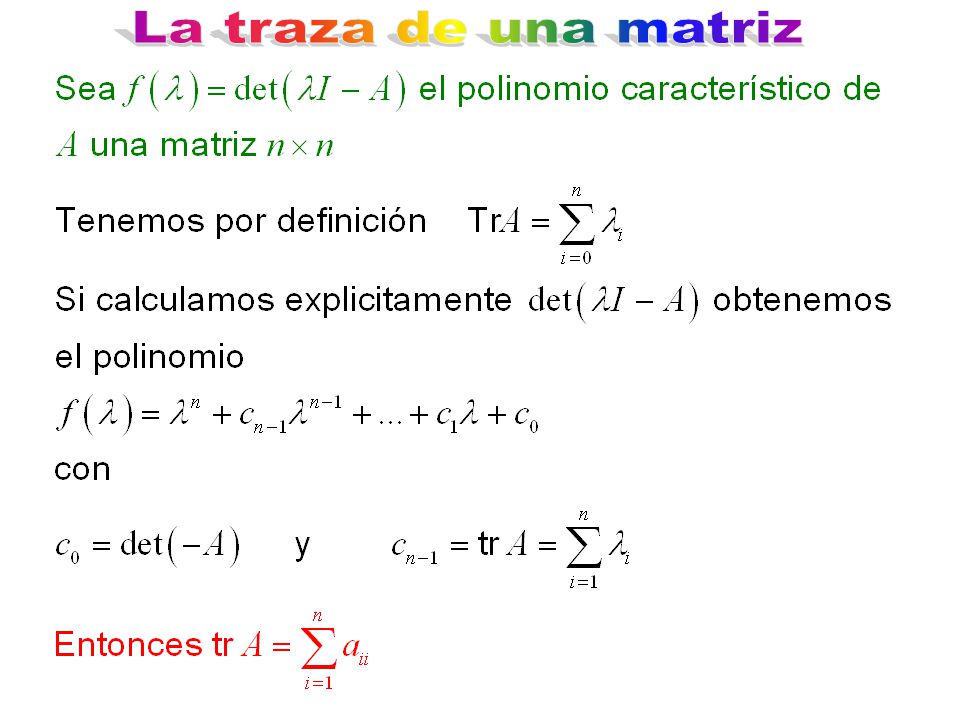
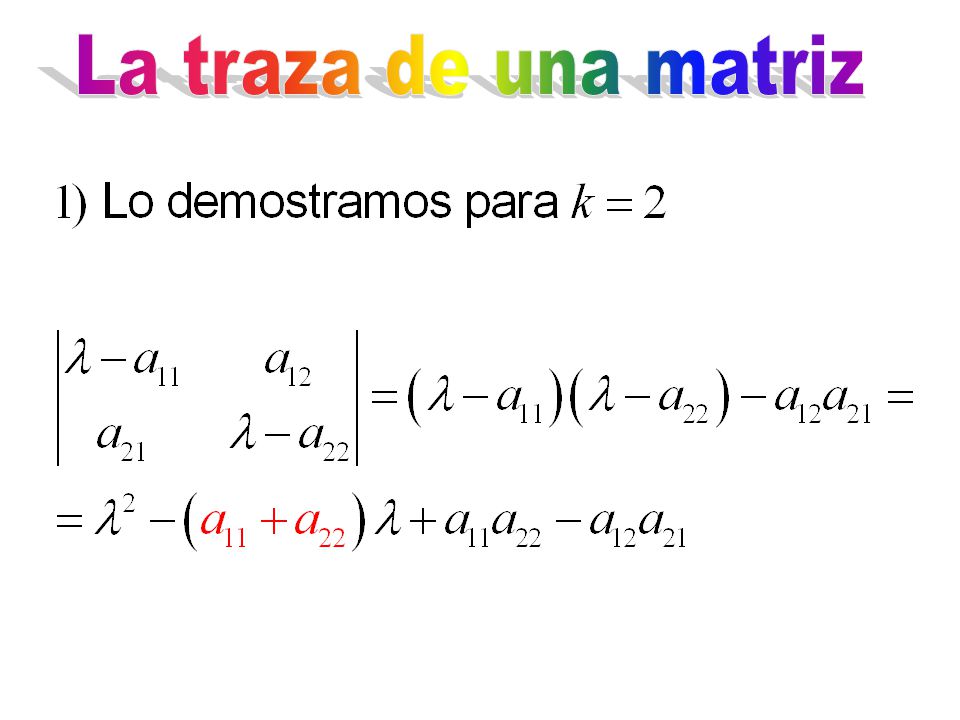
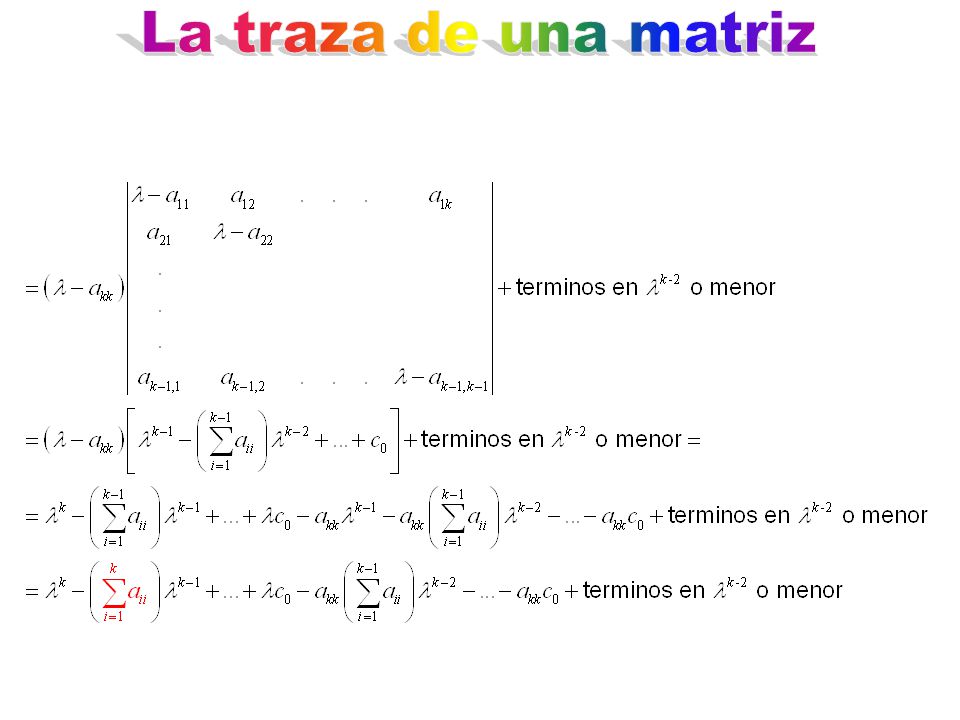
La traza de una matriz cuadrada es la suma de los elementos diagonales

708
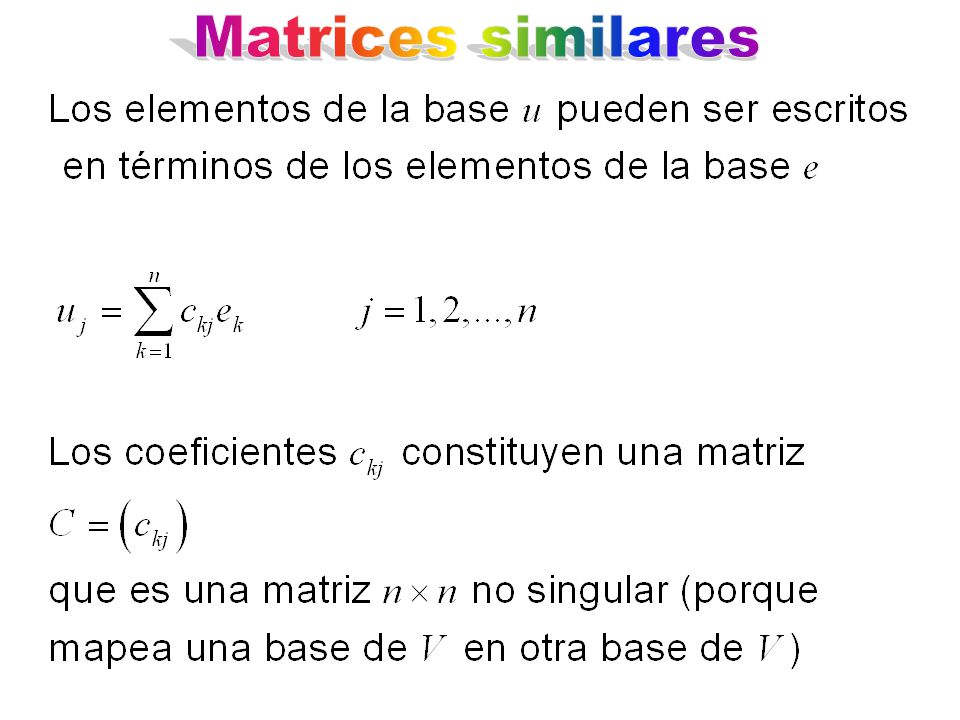
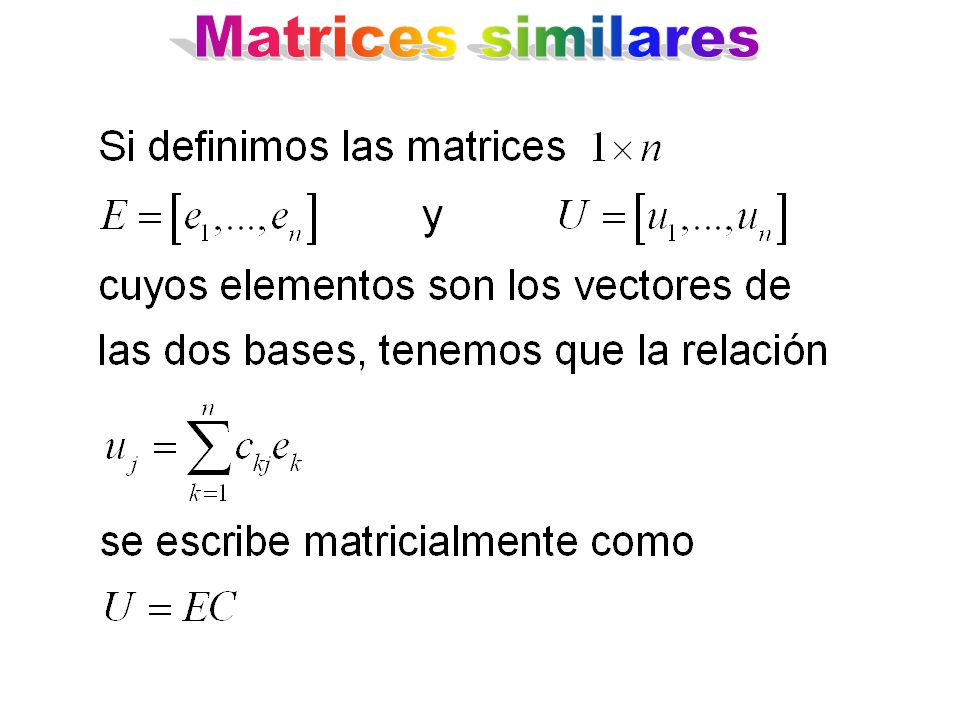
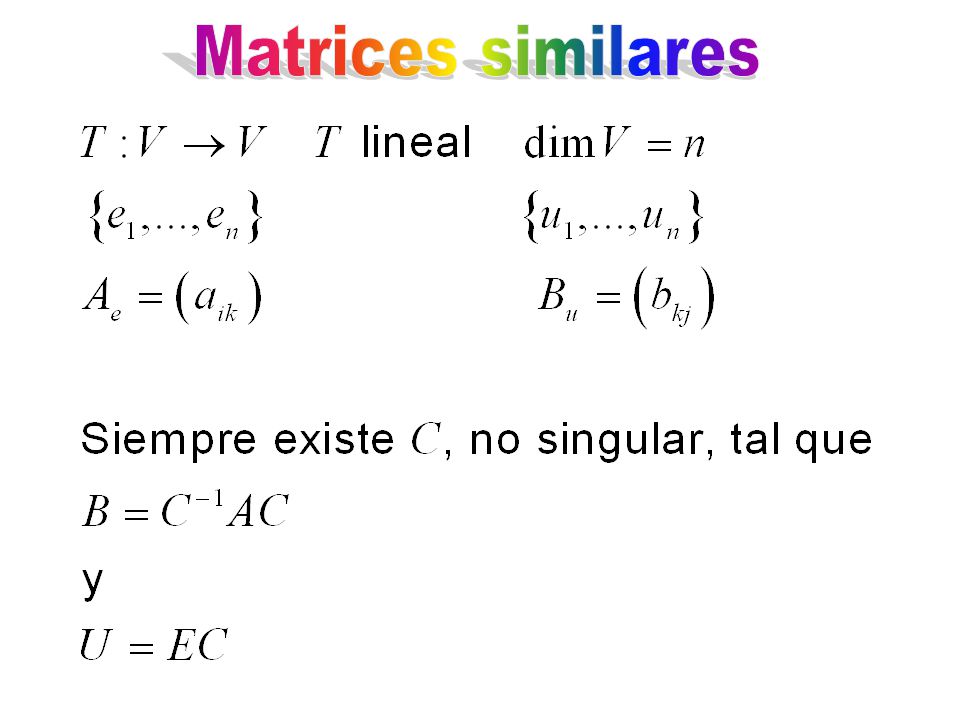
Las matrices similares tienen El mismo determinante La misma traza Los mismo valores propios El mismo polinomio característico El mismo polinomio minimal El mismo rango

713
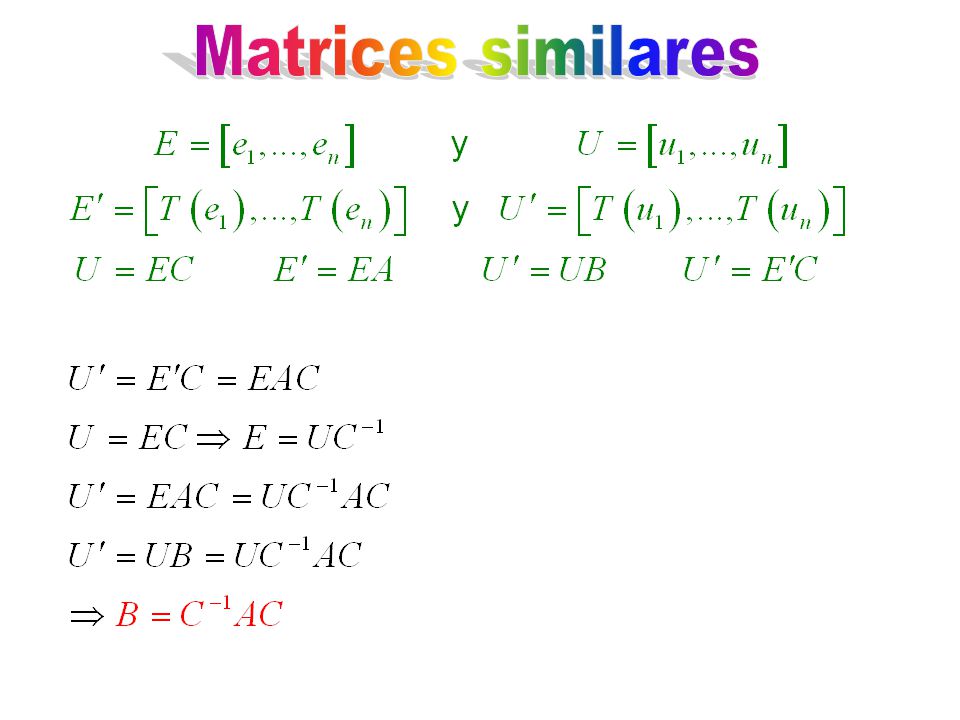
Calcular todos los valores propios Calcular los vectores propios correspondientes Formar la matriz C con los vectores propios Aplicar C -1 AC

714
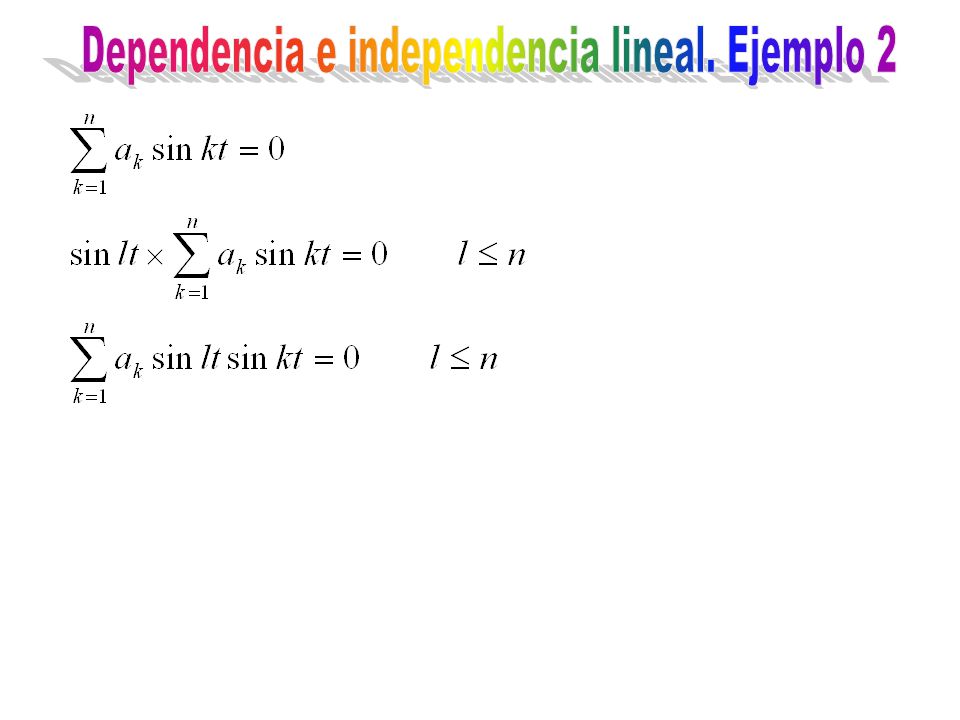
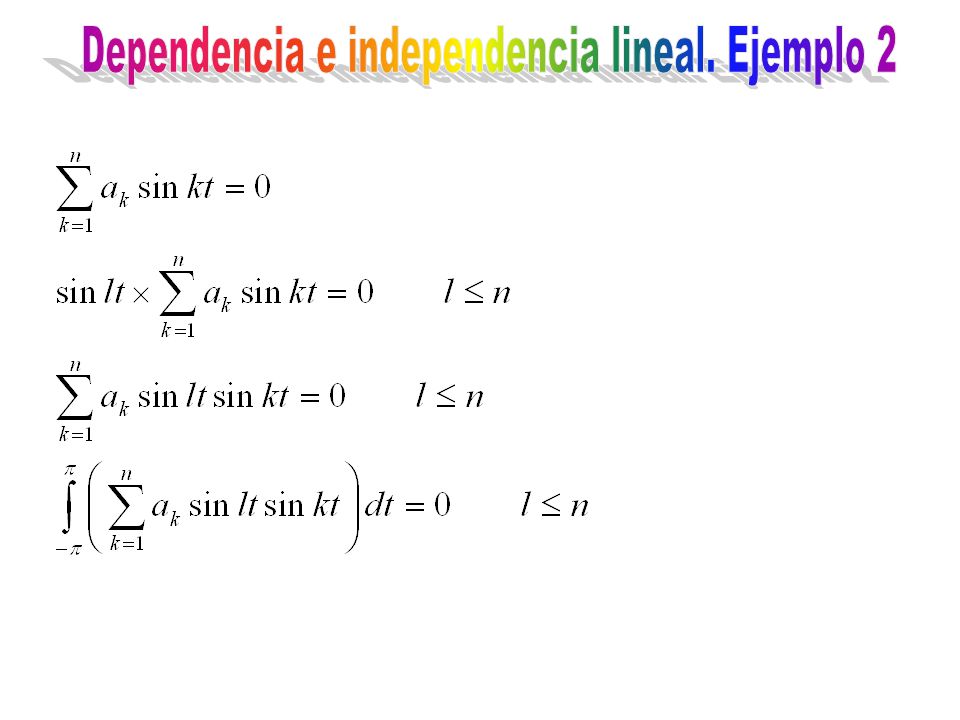
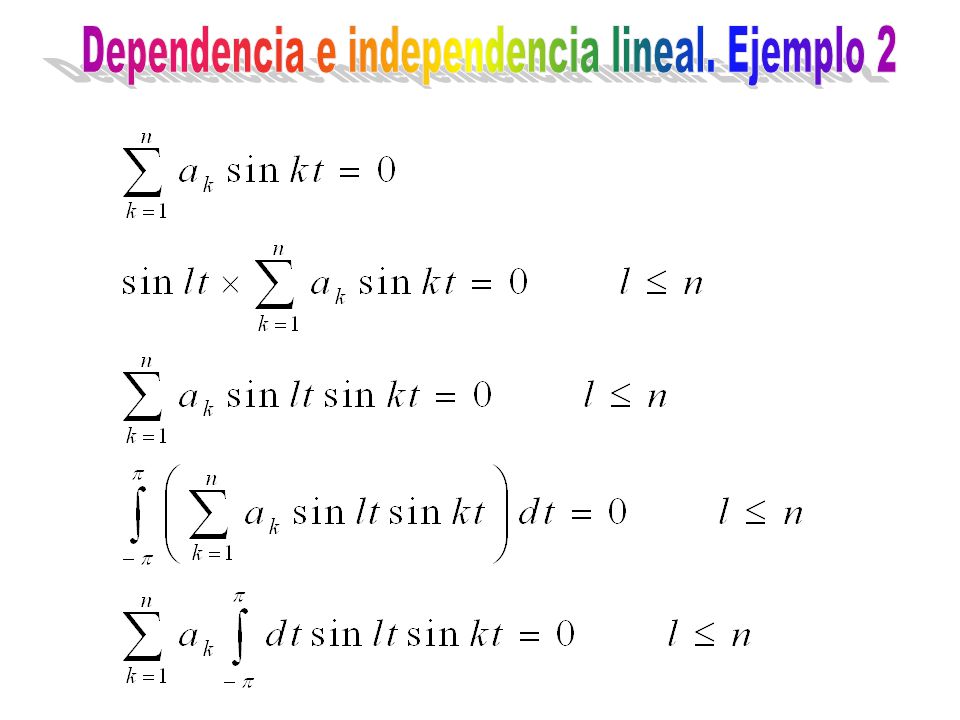
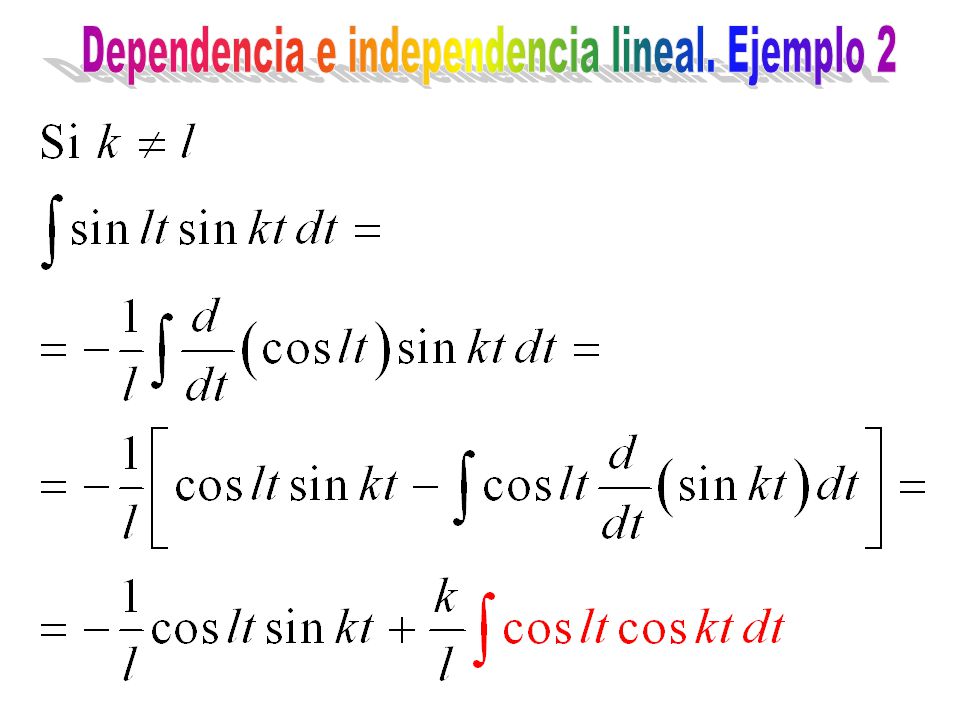
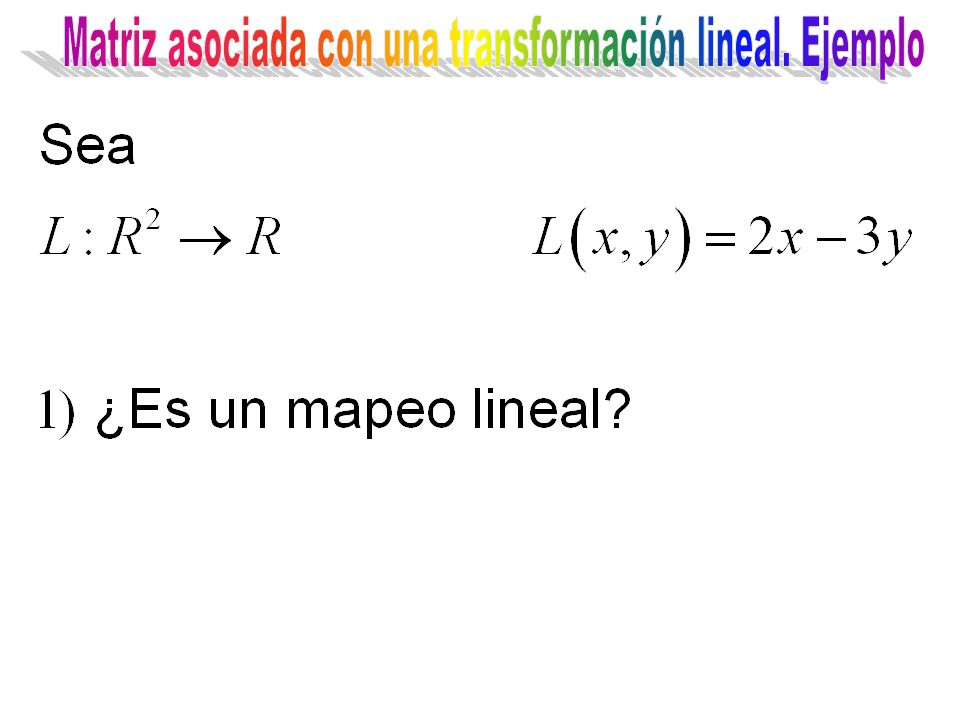
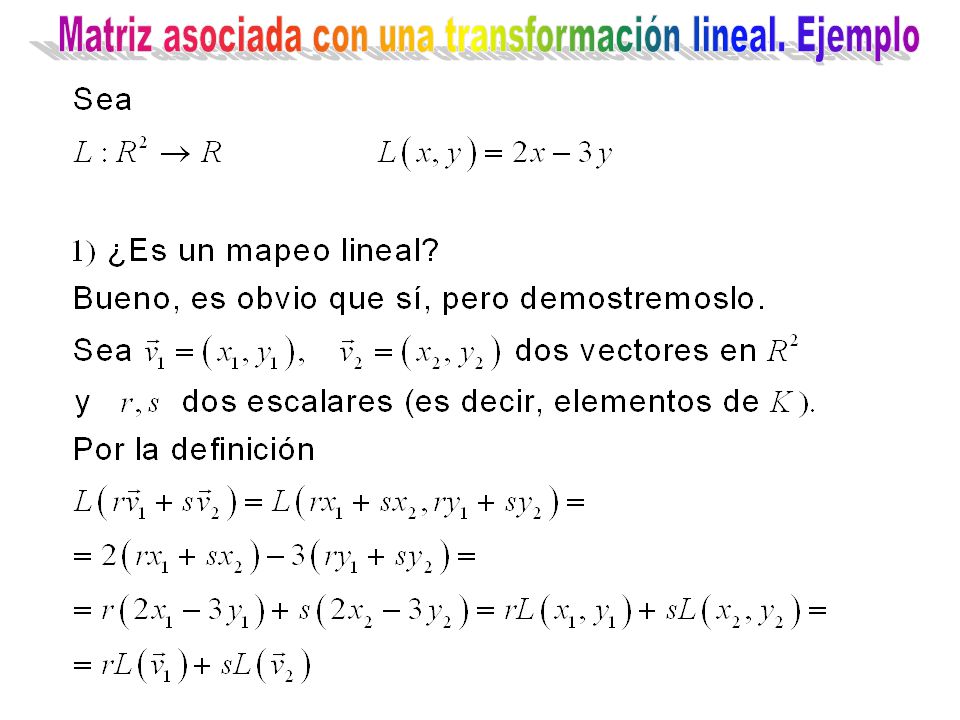
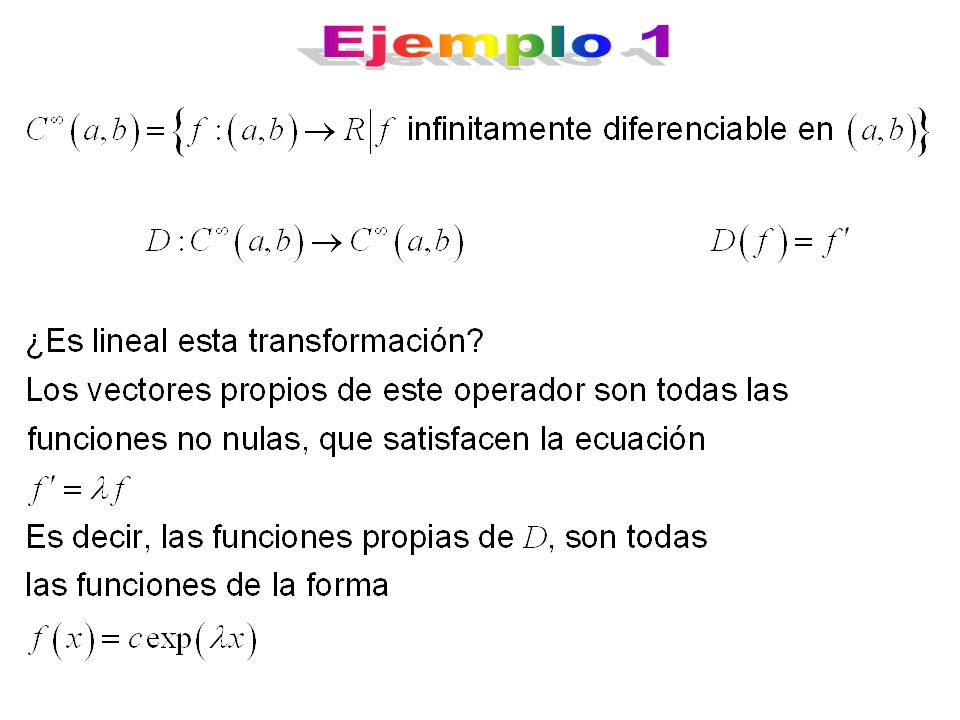
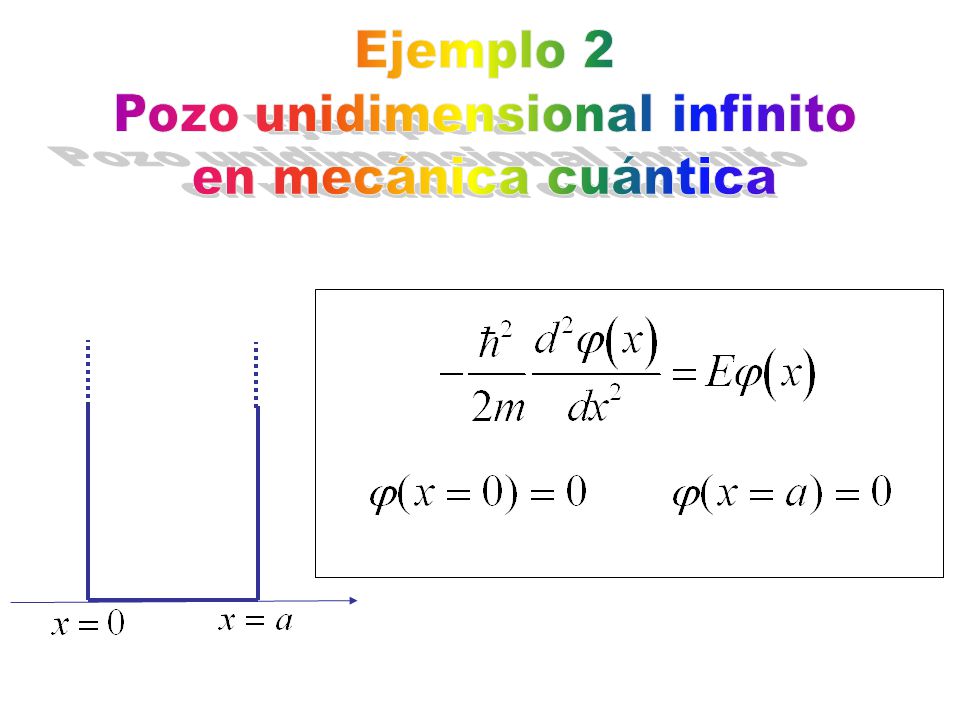
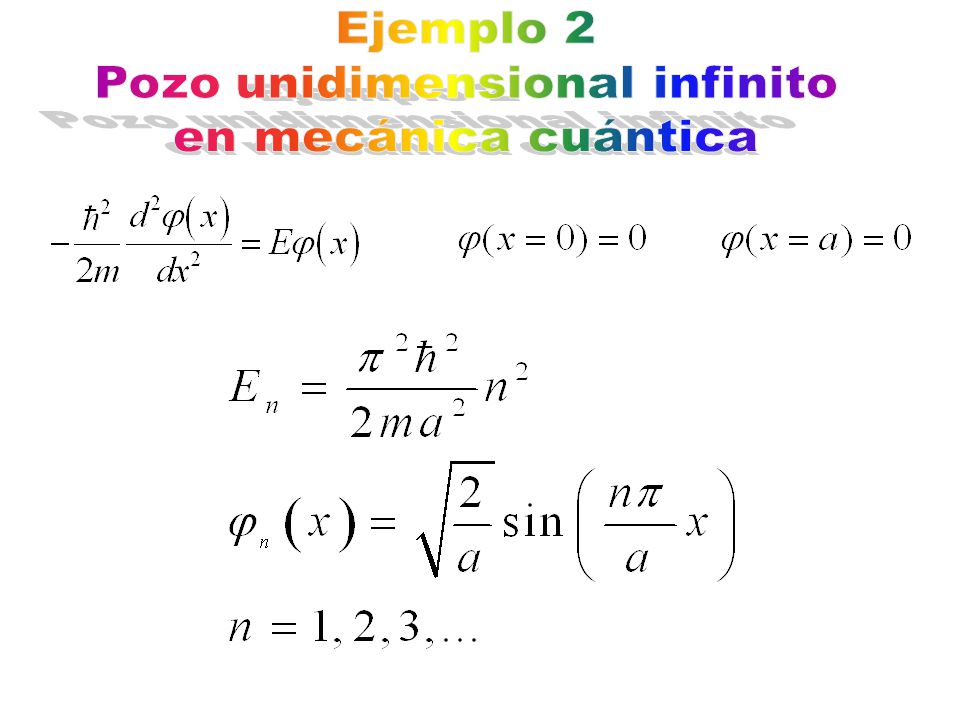
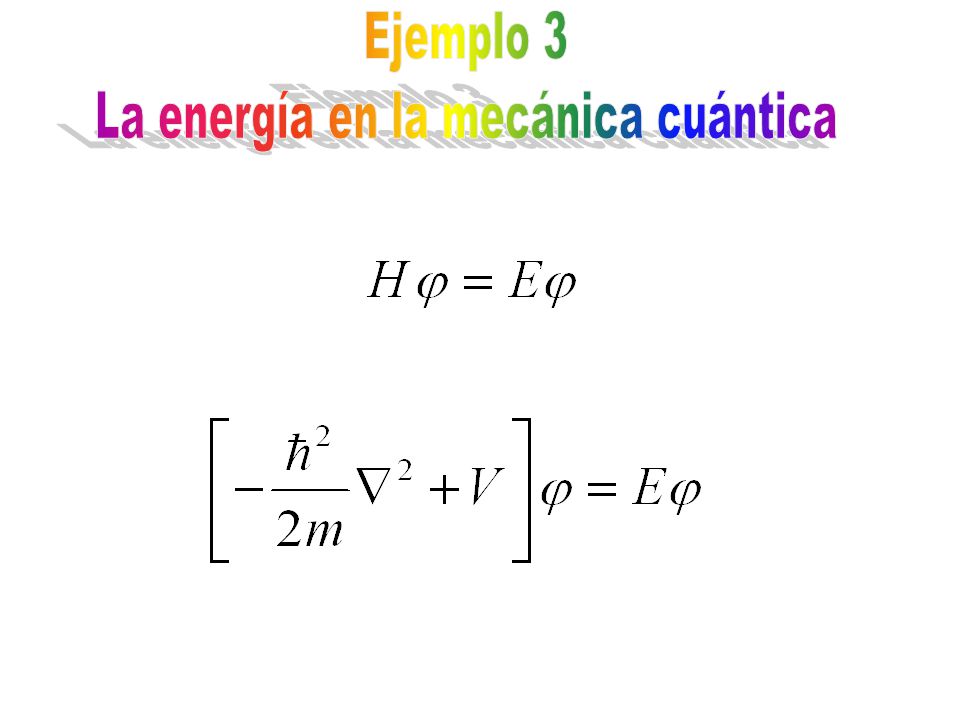
Ejemplo 1 Ejemplo 2 Ejemplo 3

716
Ejemplo 1 Ejemplo 2

Presentaciones similares