Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Estimating motion in image sequences Christoph Stiller, Janusz Konrad IEEE signal processing magazine, 16(4),pp.70-91
,pp.70-91")
3
Estructura Modelos –Representación del movimiento –Regiones de soporte Interdependencia entre movimiento y datos Criterios de estimación Métodos de búsqueda

4
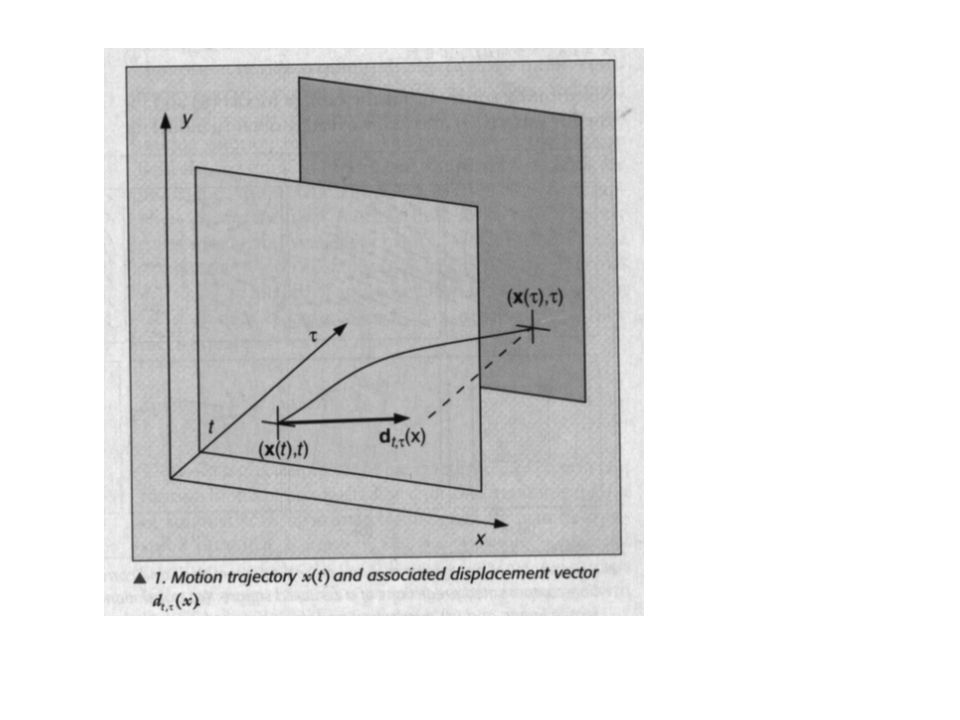
Representación del movimiento Posición 3D Desplazamiento 3D Desplazamiento 2D

6
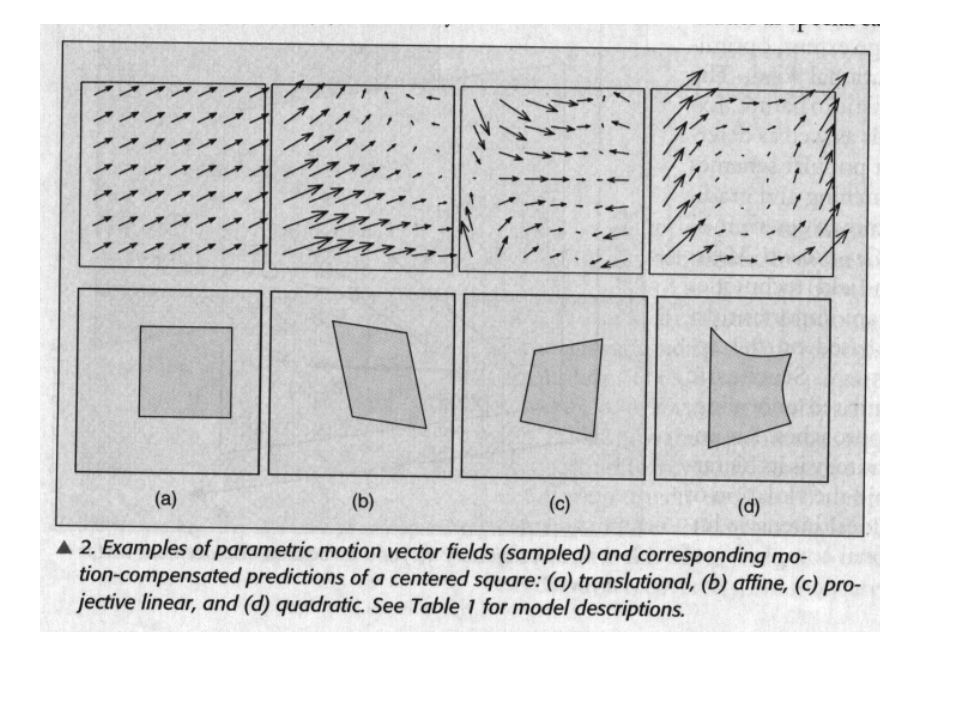
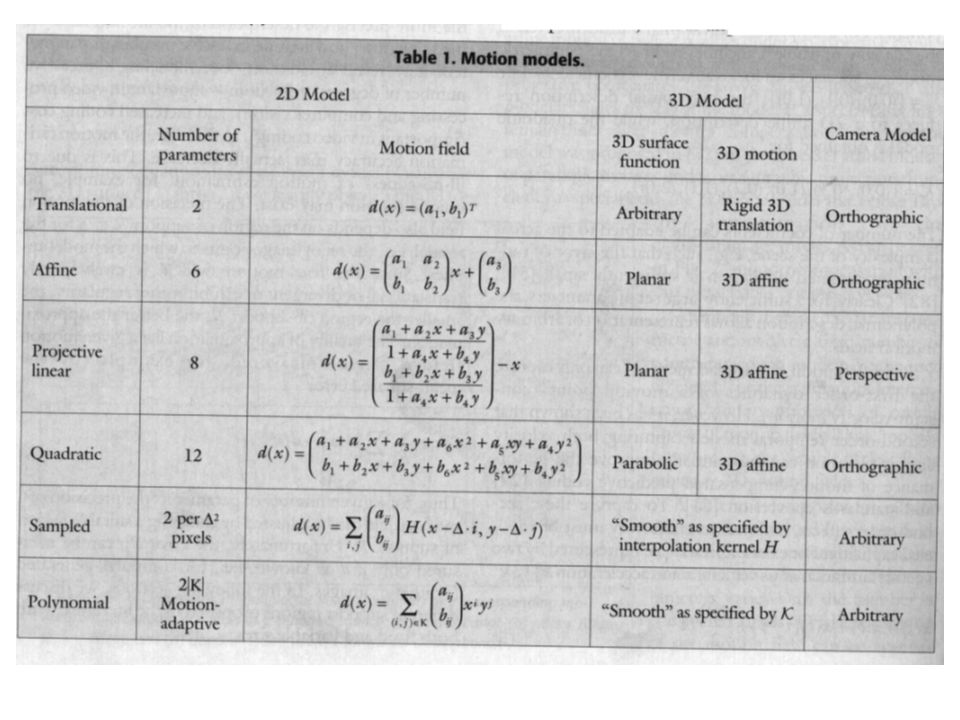
Representación del movimiento Movimiento afín Planar patch Ortographic projection Movimiento afín 2D del planar patch bajo Proyección ortográfica

9
Representacion del movimiento La más utilizada en compresión es la traslacional, en visión se utilizan una variedad Modelos de segundo orden

10
Regiones de soporte Calidad de la aproximación

11
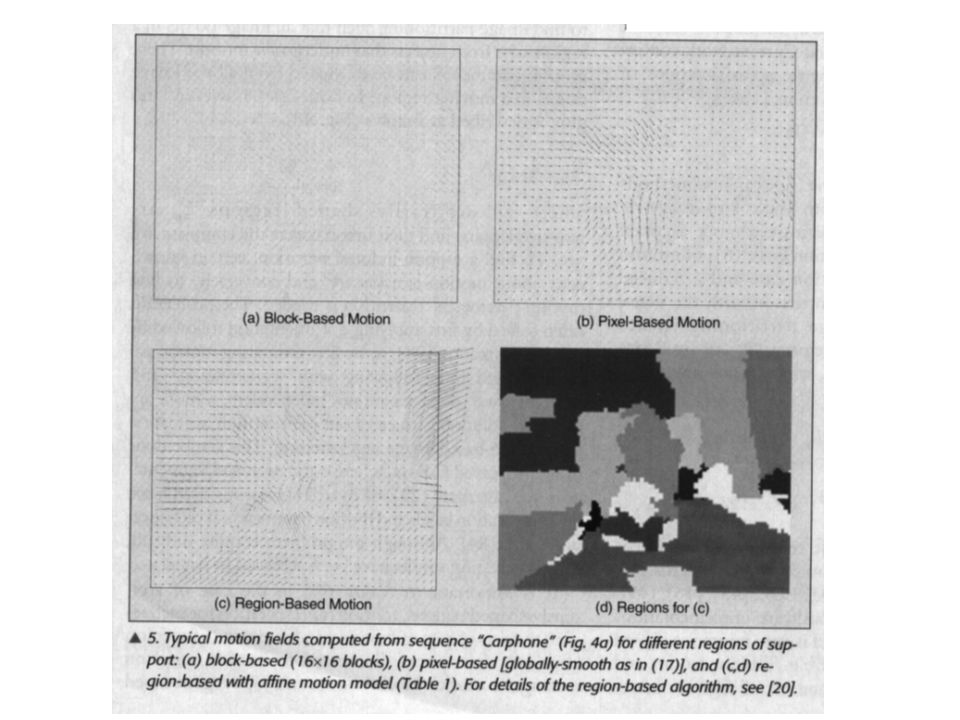
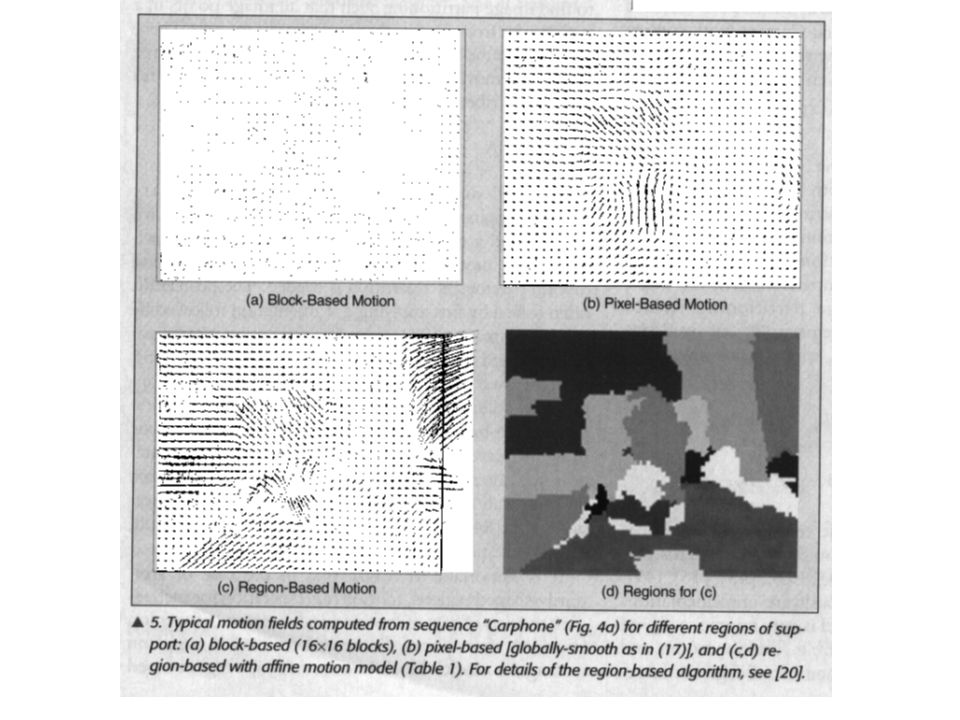
Regiones de soporte Global: la más economica y restringida Densa: movimiento de los pixels individuales Regiones –Bloques rectangulares –Regiones segmentadas en la imagen Modelos jerarquicos

17
Modelos jerárquicos de soporte

18
Interdependencia entre movimientos y datos Restricción de intensidad constante a lo la trayectoria

19
Interdependencia Extensión a imágenes en color

20
Interdependencias Restricciones de constancia del gradiente espacial en la dirección de movimiento

21
Criterios de estimación La estimación del movimiento se basa en la minimización de un cierto criterio –Diferencias de desplazamiento entre tramas DFD –Criterios en el dominio frecuencial –Regularización –Criterios bayesianos

22
DFD La diferencia de trama desplazada surge de la restricción de intensidad constante Puede aplicarse a nivel de la imagen, de bloque o de pixel Predicción compensada en movimiento

23
DFD variantes Lorentziano

24
Criterios en el dominio frecuencial En el caso de movimiento espacial constante se puede recuperar el desplazamiento a partir de la fase

25
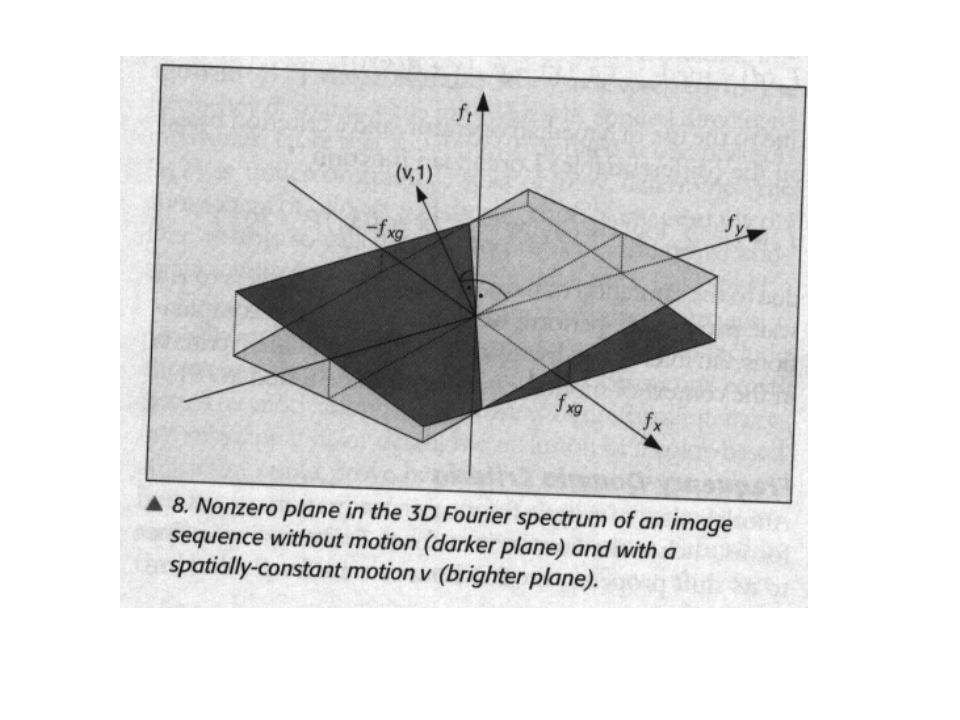
Dominio frecuencial En el caso de velocidad constante se extiende el análisis a 3D frecuencial

27
Regularización Penalización de suavización del flujo optico

29
Criterio bayesiano MAP

30
Criterio bayesiano Observaciones o probabilidades condicionadas

31
Criterio bayesiano Distribuciones a priori: favorecen la continuidad del flujo detectado

32
Criterio bayesiano Campos markovianos para modelar los apriori Distribución de Gibbs Propiedad markoviana

33
Criterio bayesiano Restricció de suavidad Discontinuidades para evitar sobre suavización

37
Estrategias de búsqueda Matching-emparejamiento Relajación Descenso de gradiente Campo medio Tecnicas jerarquicas

38
Emparejamiento Es la aproximación más frecuente y más simple Tiene aplicación en la codificaciónde video Consiste en evaluar el criterio para un número de candidatos y escoger el mejor Pude jerarquizarse la búsqueda

40
Relajación Consiste en variar la solución elemento a elemento Determinista: Iterated conditional modes Aleatorio: –algoritmo de metrópolis, –Gibss sampler –Simulated annealing

41
Relajación

42
relajación Metropolis Gibss sample Simulated annealing: Boltzmann distrib.

43
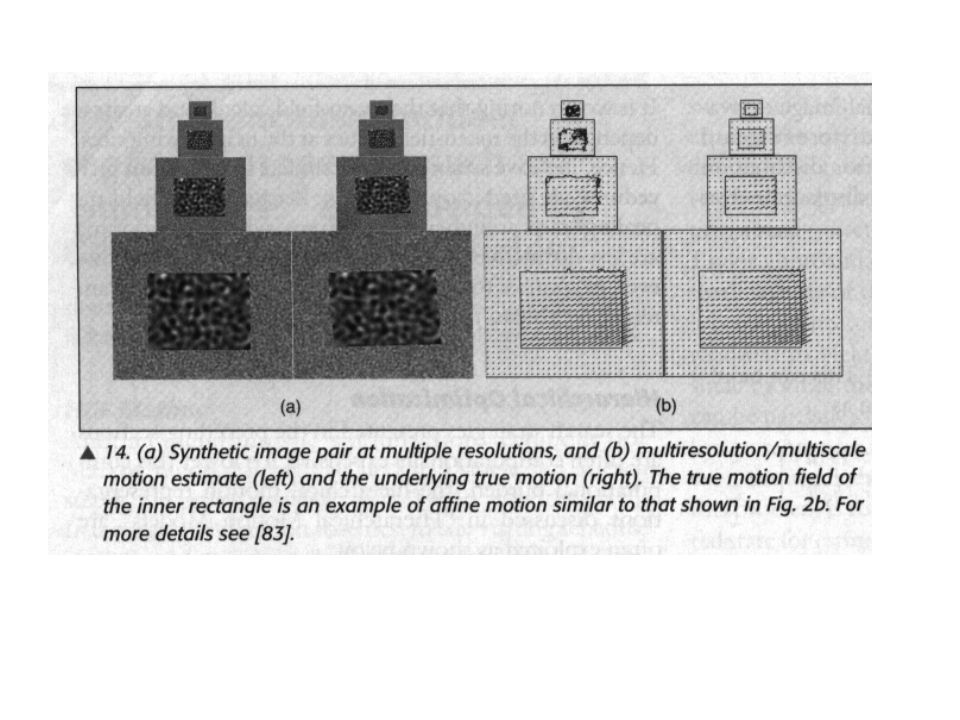
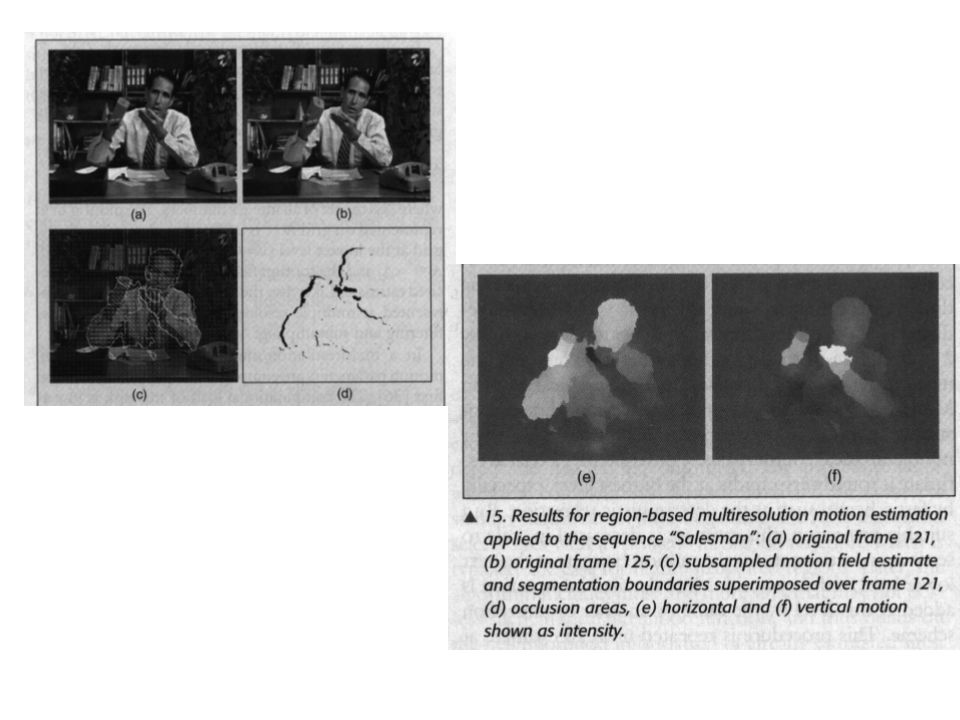
Tecnicas jerarquicas Muestreo a distintos niveles, criterios a distintos niveles, suavización de la transición entre niveles

Presentaciones similares

















y(t) Sistema Lineal F G H Figura 2: Bloque de degradación de una fila de la imagen.>")
>")








