Descargar la presentación
La descarga está en progreso. Por favor, espere

1
MICROCONTROLADORES TATIANA HURTADO RIVAS LILIANA PORTELA NOREÑA
SANTIAGO BERNAL LUISA CASTAÑO ANDRES ROCHA

2
INTRODUCCIÓN A LOS MICROCONTROLADORES

3
CONTROLADOR Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos.

4
MICROCONTROLADOR Es un circuito integrado que contiene muchas de las mismas cualidades que una computadora de escritorio, tales como la CPU, la memoria, etc., pero no incluye ningún dispositivo de “comunicación con humanos”, como monitor, teclados o mouse. Los microcontroladores son diseñados para aplicación de control de máquinas, más que para interactuar con humanos.

5
COMPONENTES DE UN MICROCONTROLADOR
Un microcontrolador dispone normalmente de los siguientes componentes: Procesador Memoria RAM Memoria tipo ROM/PROM/EPROM. Líneas de E/S Diversos módulos para el control de periféricos Generador de impulsos de reloj

6
Procesador Es la parte encargada del procesamiento de las instrucciones. Debido a la necesidad de conseguir elevados rendimientos en este proceso, se ha desembocado en el empleo generalizado de procesadores de arquitectura Harvard frente a los tradicionales que seguían la arquitectura de von Neumann.

7
MEMORIA DE PROGRAMA El microcontrolador está diseñado para que en su memoria de programa se almacenen todas las instrucciones del programa de control. Como éste siempre es el mismo, debe estar grabado de forma permanente.

8
MEMORIA DE DATOS Los datos que maneja los programas varían continuamente, y esto exige que la memoria que los contiene debe ser de lectura y escritura, por lo que la memoria RAM estática (SRAM) es la más adecuada, aunque sea volátil.
 es la más adecuada, aunque sea volátil.")
9
DIFERENCIA ENTRE MICROCONTROLADOR Y MICROPROCESADOR
la diferencia esta en que un microcontrolador es un sistema autónomo e independiente, mientras que el microprocesador es una parte, cabe decir que esencial, que forma parte de un sistema mayor.

10
MICROCONTROLADORES PIC16F84

11
Microcontroladores PIC
PIC (Peripheral Interface Controler) controlador de periféricos. PIC 16F84 es un sistema sencillo, barato y potente para muchas aplicaciones electrónicas.
 controlador de periféricos. PIC 16F84 es un sistema sencillo, barato y potente para muchas aplicaciones electrónicas.")
12
Conociendo al PIC16F84 Posee 18 pines, de los cuales 13 son de I/O
Memoria para guardar programas Timer/Contador interno Memoria EEPROM

13
Diagrama del PIC16F84

14
Oscilador Todo microcontrolador requiere de un circuito que le indique la velocidad de trabajo, es el llamado oscilador o reloj. Este genera una onda cuadrada de alta frecuencia que se utiliza como señal para sincronizar todas las operaciones del sistema.

15
Esquema de reloj/ciclo de instrucción

16
Funcionamiento Un PIC nuevo viene vacío, no hace nada
Para decirle al microcontrolador lo que queremos que haga, necesitamos escribir un programa en el computador y grabárselo en la memoria Se puede grabar y volver a grabar muchas veces distintos programas en el mismo PIC16F84

17
Pasos para grabar un programa
Ir a un PC y escribir el código en ASSEMBLER Compilar el archivo Conectar el PIC a un programador de PIC’s que se conecta al PC Grabar el archivo compilado al PIC

18
Funcionamiento Ahora que ya tenemos el programa en el PIC, podemos sacarlo y ponerlo en el circuito Al alimentar con corriente al PIC, veremos cómo ejecuta las acciones que le dijimos que hiciera en el programa

19
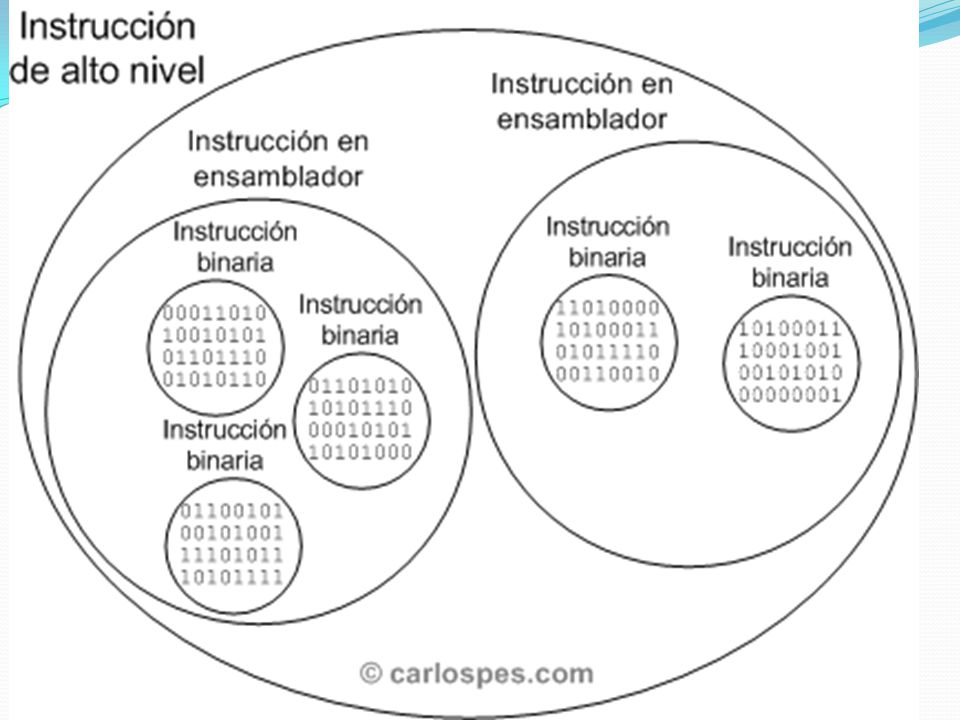
Lenguaje ensamblador (ASM)
")
20
ASM Lenguaje de programación de bajo nivel que interactúa directamente con el hardware.

21
Características de ASM
Programación bajo nivel = optimización hardware Programación para micro controladores. Es el lenguaje que interactúa con el hardware de nuestro computador.

23
Código de ejemplo:

24
Otras ventajas Control de rutina.
Diferentes tipos de datos: estructuras, clases.

25
Codigo: Binario: 10110000 01100001 (Hexadecimal: 0xb061)
Ensamblador: MOV al, 061h Asigna el valor hexadecimal 61 (97 decimal) al registro "al".
 al registro al .")
26
Operaciones en asm mover computar afectar el flujo del programa
llenar un registro con un valor constante mover datos de una posición de memoria a un registro o viceversa escribir y leer datos de dispositivos computar sumar, restar, multiplicar o dividir los valores de dos registros, colocando el resultado en uno de ellos o en otro registro realizar operaciones binarias, incluyendo operaciones lógicas (AND/OR/XOR/NOT) comparar valores entre registros (mayor, menor, igual) afectar el flujo del programa saltar a otra posición en el programa y ejecutar instrucciones allí saltar si se cumplen ciertas condiciones (IF) saltar a otra posición, pero guardar el punto de salida para retornar (CALL, llamada a subrutinas)
 comparar valores entre registros (mayor, menor, igual) afectar el flujo del programa. saltar a otra posición en el programa y ejecutar instrucciones allí. saltar si se cumplen ciertas condiciones (IF) saltar a otra posición, pero guardar el punto de salida para retornar (CALL, llamada a subrutinas)")
27
Software para trabajar en ASM

28
microbasic

29
Easy code

30
emu8086

31
MEMORIA EEPROM TIMER0 INTERRUPCIONES

32
MEMORIA EEPROM Es programable y borrable eléctricamente.
Frente a las memorias EPROM, presenta la ventaja de permitir su borrado y programación en placa, aunque tienen mayor coste debido a sus dos transistores por celda.

33
CaracterísticaS principales de la EEPROM
Se pueden conectar fácilmente con microprocesadores o microcontroladores, algunas de estas memorias tienen pines para realizar esta labor. En cuanto a la forma de referenciar los circuitos, estas memorias suelen comenzar con el prefijo 28, de forma que la 2864 indica una memoria EEPROM de 64Kbytes. Una ventaja adicional de este tipo de memorias radica en que no necesitan de una alta tensión de grabado, sirven los 5 voltios de la tensión de alimentación habitual.

34
Aplicaciones de las Memorias EEPROM
Encontramos este tipo de memorias en aquellas aplicaciones en las que el usuario necesita almacenar de forma permanente algún tipo de información; por ejemplo en los receptores de TV o magnetoscopios para memorizar los ajustes o los canales de recepción.

35
TIMER 0 Temporizador/contador de 8-BIT Capacidad de lectura/grabación.
Prescaler (circuito divisor de frecuencias programable por software) de 8-BIT Posibilidad de seleccionar reloj interno o externo El modo TIMER, (contador de tiempos) es seleccionado poniendo a cero el bit
 de 8-BIT. Posibilidad de seleccionar reloj interno o externo. El modo TIMER, (contador de tiempos) es seleccionado poniendo a cero el bit.")
36
INTERRUPCIONES El funcionamiento de las interrupciones es similar al de las subrutinas de las cuales se diferencian principalmente en los procedimientos que las ponen en marcha. Así como las subrutinas se ejecutan cada vez que en el programa aparece una instrucción CALL, las interrupciones se ponen en marcha al aparecer en cualquier instante un evento externo al programa, es decir por un mecanismo hardware

37
La CPU deja de ejecutar la secuencia de instrucciones en la que se encuentra y pasa a ejecutar la rutina de servicio de interrupción, una vez terminada esta rutina, la CPU regresa a la secuencia donde se produjo la interrupción y sigue ejecutándola.

38
Mercado aplicaciones de microcontroladores

39
Aplicaciones de los microcontroladores.
Cada vez existen más productos que incorporan un microcontrolador con el fin de aumentar sustancialmente sus prestaciones, reducir su tamaño y costo, mejorar su fiabilidad y disminuir el consumo.

40
El mercado de los microcontroladores.
Aunque en el mercado de la microinformática la mayor atención la acaparan los desarrollos de los microprocesadores, lo cierto es que se venden cientos de microcontroladores por cada uno de aquéllos. Existe una gran diversidad de microcontroladores. Quizá la clasificación más importante sea entre microcontroladores de 4, 8, 16 ó 32 bits.

41
Gracias Fuentes: microcontrolador PIC16F84, Enrique palacios.
Presentaciones similares











 es la memoria desde donde el procesador recibe las instrucciones.>")







