Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Sistemas Inteligentes Distribuidos Sistemas Inteligentes Distribuidos Sesión 13 L. Enrique Sucar / Marco López Sesión 13 L. Enrique Sucar / Marco López Robótica Inteligente

2
Estudia cómo un grupo de agentes inteligentes debe de coordinar sus actividades para lograr sus metas Inteligencia Artificial Distribuida (DAI)
")
3
Un agente es cualquier ente que se pueda ver como percibiendo su ambiente a través de sensores y actuando en el ambiente por medio de efectores. Un agente racional es un agente que hace “buenas” acciones. Un agente es cualquier ente que se pueda ver como percibiendo su ambiente a través de sensores y actuando en el ambiente por medio de efectores. Un agente racional es un agente que hace “buenas” acciones. Agentes

4
Agente Percepciones Acciones Conocimiento Metas Razonamiento AMBIENTE

5
Una medida de desempeño que define su grado de éxito Todo lo que el agente ha percibido o secuencia de percepción ( percept sequence ) Lo que sabe del ambiente Las acciones que puede tomar Una medida de desempeño que define su grado de éxito Todo lo que el agente ha percibido o secuencia de percepción ( percept sequence ) Lo que sabe del ambiente Las acciones que puede tomar Un agente racional depende en todo momento de:
 Lo que sabe del ambiente Las acciones que puede tomar Una medida de desempeño que define su grado de éxito Todo lo que el agente ha percibido o secuencia de percepción ( percept sequence ) Lo que sabe del ambiente Las acciones que puede tomar Un agente racional depende en todo momento de:")
6
Para cada posible secuencia de percepción, un agente racional toma la acción con la que espera maximizar su medida de desempeño, en base a la evidencia dada por su secuencia de percepción y cualquier conocimiento incorporado que tenga. Las acciones se pueden usar para obtener información útil. Para cada posible secuencia de percepción, un agente racional toma la acción con la que espera maximizar su medida de desempeño, en base a la evidencia dada por su secuencia de percepción y cualquier conocimiento incorporado que tenga. Las acciones se pueden usar para obtener información útil.

7
Idealmente, hay que hacer un mapeo entre (i) las posibles secuencias de percepción y (ii) las posibles acciones (en la práctica pueden ser infinitos). A veces se pueden dar especificaciones (más que enumerarlas) de lo que hay que hacer. Idealmente, hay que hacer un mapeo entre (i) las posibles secuencias de percepción y (ii) las posibles acciones (en la práctica pueden ser infinitos). A veces se pueden dar especificaciones (más que enumerarlas) de lo que hay que hacer.
 de lo que hay que hacer. Idealmente, hay que hacer un mapeo entre (i) las posibles secuencias de percepción y (ii) las posibles acciones (en la práctica pueden ser infinitos). A veces se pueden dar especificaciones (más que enumerarlas) de lo que hay que hacer..")
8
Requiere tablas muy grandes El usar una tabla acciones - secuencia de percepciones en general no es adecuada porque: Requiere mucho tiempo para construir la tabla Requiere mucho tiempo para construir la tabla

9
No hay autonomía, por lo que si cambia el ambiente el agente deja de saber qué hacer No hay autonomía, por lo que si cambia el ambiente el agente deja de saber qué hacer Aunque se le dé aprendizaje, necesitaría mucho tiempo para aprender todas las entradas de la tabla Aunque se le dé aprendizaje, necesitaría mucho tiempo para aprender todas las entradas de la tabla

10
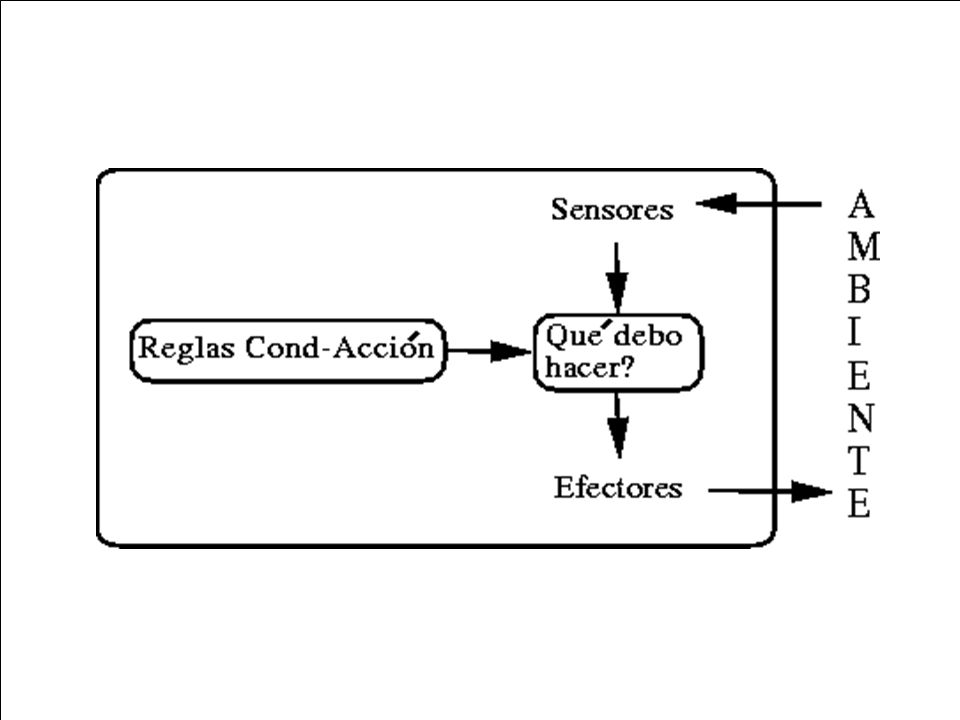
Agentes de reflejos simples: Construir una tabla es imposible, pero podemos considerar algunas asociaciones comunes en términos de reglas situación-acción. e.g., Agentes de reflejos simples: Construir una tabla es imposible, pero podemos considerar algunas asociaciones comunes en términos de reglas situación-acción. e.g., Para construir un mapeo entre percepciones y acciones podemos pensar en varios tipos de agentes. IF el coche de enfrente está frenando THEN empieza a frenar IF el coche de enfrente está frenando THEN empieza a frenar

12
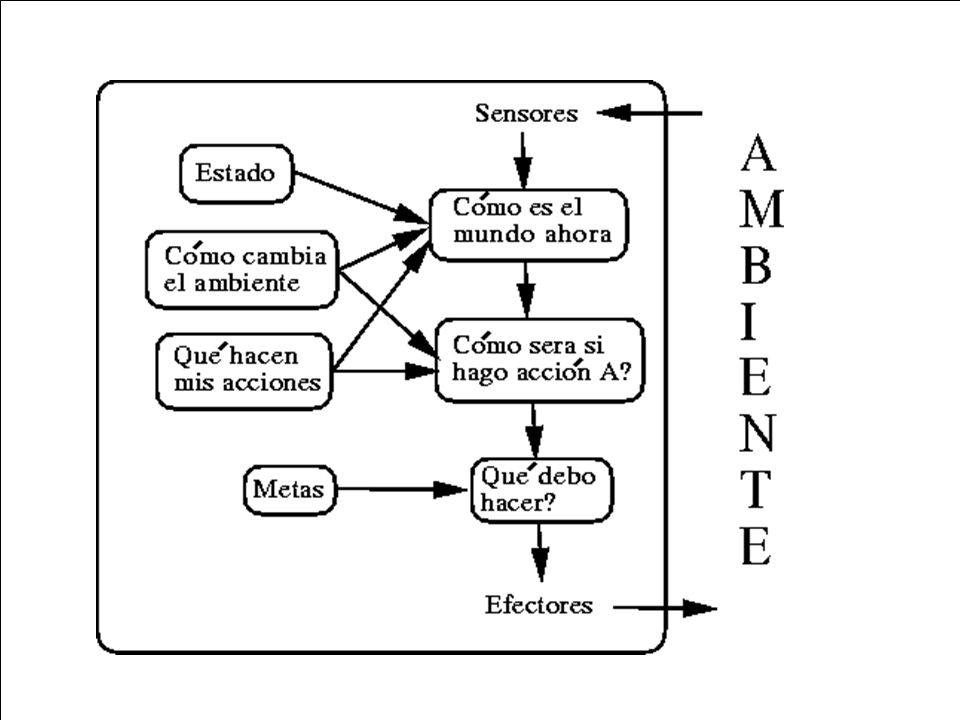
Esto es muy simple, y normalmente se necesita un estado interno para (i) ver como cambia el ambiente independientemente del agente y (ii) como afectan las acciones del agente al ambiente. Agentes de reflejos simples y estado interno.

14
El agente necesita información de sus metas para escoger qué acciones las pueden cumplir (pueden usarse técnicas de búsqueda y planificación). Esto lo puede hacer más flexible (v.g., si está lloviendo ajustar la efectividad de los frenos). El agente necesita información de sus metas para escoger qué acciones las pueden cumplir (pueden usarse técnicas de búsqueda y planificación). Esto lo puede hacer más flexible (v.g., si está lloviendo ajustar la efectividad de los frenos). Agentes con información de metas.
. El agente necesita información de sus metas para escoger qué acciones las pueden cumplir (pueden usarse técnicas de búsqueda y planificación). Esto lo puede hacer más flexible (v.g., si está lloviendo ajustar la efectividad de los frenos). Agentes con información de metas..")
16
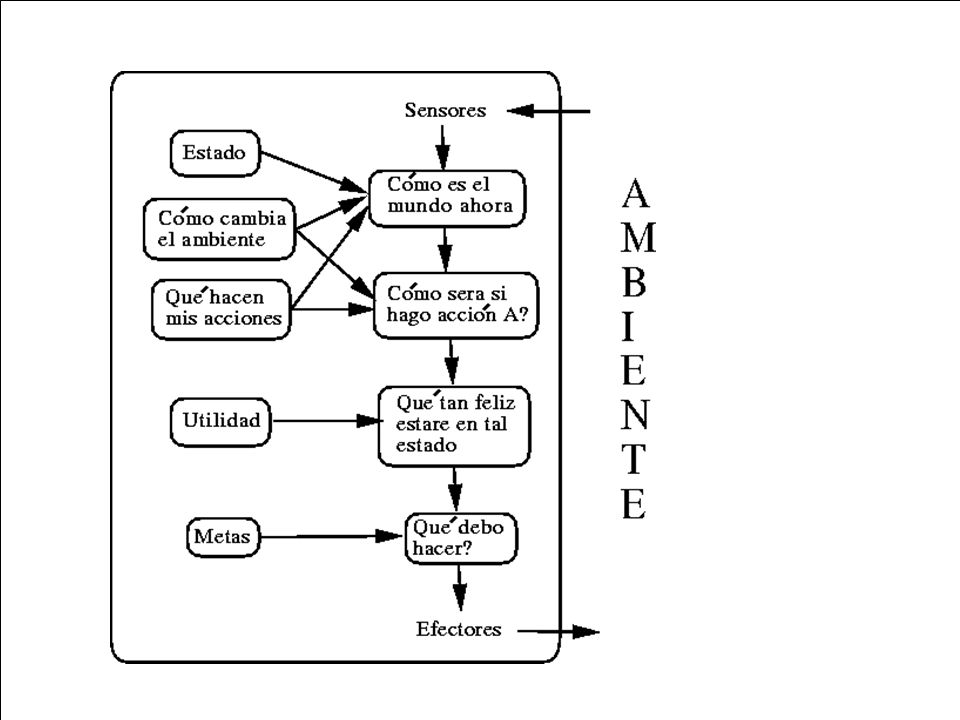
Las metas por si solas no son suficientes para generar un comportamiento de buena calidad. Para esto necesitamos una medida de utilidad (función que mapea un estado o secuencia de estados con un número real). Las metas por si solas no son suficientes para generar un comportamiento de buena calidad. Para esto necesitamos una medida de utilidad (función que mapea un estado o secuencia de estados con un número real). Agentes con medida de utilidad.
. Las metas por si solas no son suficientes para generar un comportamiento de buena calidad. Para esto necesitamos una medida de utilidad (función que mapea un estado o secuencia de estados con un número real). Agentes con medida de utilidad..")
18
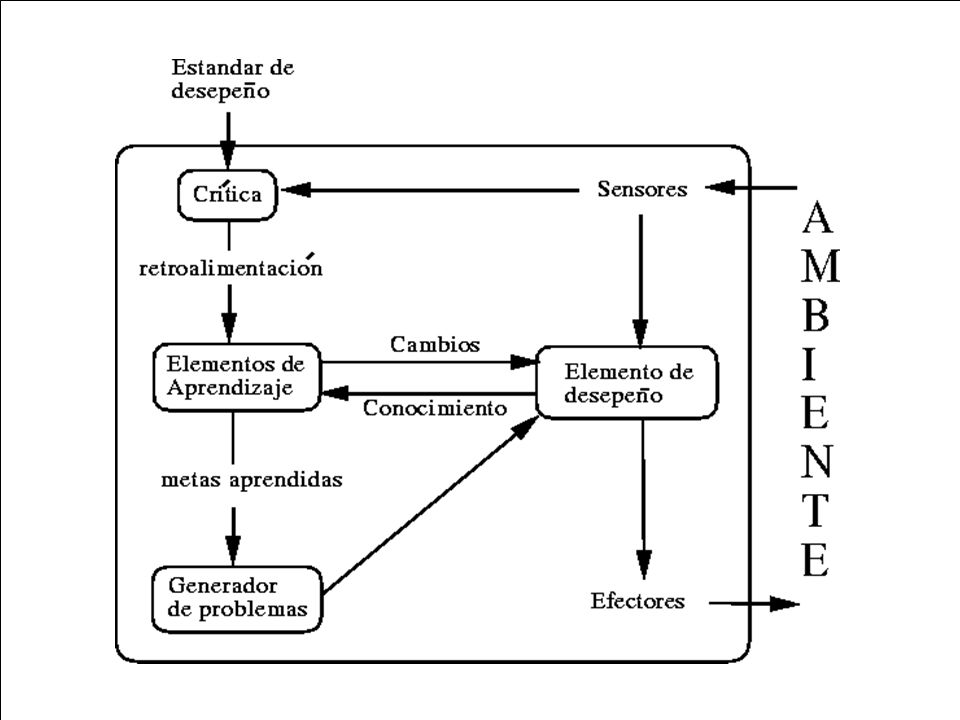
La idea es que las percepciones no se usen sólo para actuar, sino también para mejorar su desempeño en el futuro. La idea es que las percepciones no se usen sólo para actuar, sino también para mejorar su desempeño en el futuro. Agentes con aprendizaje.

20
Accesibles o inaccesibles Determinísticos o no determinísticos Episódicos o no espisódicos Estáticos, dinámicos, o semidinámicos Discretos o continuos Ambientes

21
Sistemas Multiagentes Grupos de agentes que interactuan para resolver en forma conjunta un problema Aspectos importantes: – Esquemas de control (arquitectura) – Comunicación – Negociación – Manejo de conflictos
 – Comunicación – Negociación – Manejo de conflictos")
22
En cada paso, cada ficha puede quedarse donde está o moverse hacia arriba, abajo, izquierda o derecha Los azules ganan si ocupan los 4 cuadros alrededor del rojo Los azules pierden si el rojo llega a un borde En cada paso, cada ficha puede quedarse donde está o moverse hacia arriba, abajo, izquierda o derecha Los azules ganan si ocupan los 4 cuadros alrededor del rojo Los azules pierden si el rojo llega a un borde Ejemplo: Una ficha roja (R) y 4 fichas azules (A1, A2, A3, A4) en un tablero de NxN. Ejemplo: Una ficha roja (R) y 4 fichas azules (A1, A2, A3, A4) en un tablero de NxN. Reglas:
 y 4 fichas azules (A1, A2, A3, A4) en un tablero de NxN. Reglas:.")
24
En general, cada agente tiene una representación interna (que puede ser parcial o incorrecta) del problema y que puede diferir de la de los otros agentes. Por ejemplo, si un agente es el que controla todo, el resto puede no tener ninguna representación del problema. En general, cada agente tiene una representación interna (que puede ser parcial o incorrecta) del problema y que puede diferir de la de los otros agentes. Por ejemplo, si un agente es el que controla todo, el resto puede no tener ninguna representación del problema.
 del problema y que puede diferir de la de los otros agentes. Por ejemplo, si un agente es el que controla todo, el resto puede no tener ninguna representación del problema..")
25
Esquemas de Control 1) Control central: Algoritmo: Un agente (A ) controla todo y ordena a los demás (A, A y A ) qué hacer 1 1 2 2 3 3 4 4 1. A ve la posición de R y de los A 's 2. A cálcula cuadrantes y asigna uno por agente (dependiendo de su posición) 1. A ve la posición de R y de los A 's 2. A cálcula cuadrantes y asigna uno por agente (dependiendo de su posición) 1 1 1 1 k k
 1. A ve la posición de R y de los A s 2. A cálcula cuadrantes y asigna uno por agente (dependiendo de su posición) k k.")
26
4. Los esclavos se mueven 3. A dice cómo moverse para entrar a los cuadrantes 3. A dice cómo moverse para entrar a los cuadrantes 1 1

27
IF R no se mueve, moverse más cerca a R IF R se mueve (a un cuadrante) entonces: IF R no se mueve, moverse más cerca a R IF R se mueve (a un cuadrante) entonces: Para determinar los movimientos: Si se mueve junto a A, A no se mueve El A en el cuadrante opuesto debe de seguir a R Los otros, se deben de mover perpendicularmente a R y dentro de su cuadrante Si se mueve junto a A, A no se mueve El A en el cuadrante opuesto debe de seguir a R Los otros, se deben de mover perpendicularmente a R y dentro de su cuadrante k k k k k k
 entonces: IF R no se mueve, moverse más cerca a R IF R se mueve (a un cuadrante) entonces: Para determinar los movimientos: Si se mueve junto a A, A no se mueve El A en el cuadrante opuesto debe de seguir a R Los otros, se deben de mover perpendicularmente a R y dentro de su cuadrante Si se mueve junto a A, A no se mueve El A en el cuadrante opuesto debe de seguir a R Los otros, se deben de mover perpendicularmente a R y dentro de su cuadrante k k k k k k")
28
Requerimientos: Los esclavos deben de percibir comandos A debe de poder calcular cuadrantes 1 1 A puede calcular movimientos adecuados 1 1 A sabe la posición de R y de los A 's todo el tiempo A sabe la posición de R y de los A 's todo el tiempo 1 1 k k A sabe qué comandos obedecen los A 's y cómo comunicarlos A sabe qué comandos obedecen los A 's y cómo comunicarlos 1 1 k k

29
2) Control central + agentes con percepción: Los agentes pueden percibir su posición y se la reportan a A el cual debe de poder combinarla para decidir cómo actuar. Los agentes pueden percibir su posición y se la reportan a A el cual debe de poder combinarla para decidir cómo actuar. 1 1

30
3) Control central + agentes buscan a R : Todos los agentes tienen la capacidad de detectar la posición de R dentro de un rango limitado. Variación al algoritmo: 1. Cada A informa su posición 2. A asigna una región a cada A 3. A comanda a que cada A “patrulle” su región 4. Cada A busca a R y si lo detecta le informa a A 1. Cada A informa su posición 2. A asigna una región a cada A 3. A comanda a que cada A “patrulle” su región 4. Cada A busca a R y si lo detecta le informa a A k k k k k k k k 1 1 1 1 1 1

31
Requerimientos: Los esclavos pueden transmitir la posición de R al controlador Los esclavos pueden transmitir la posición de R al controlador A sabe el rango de visibilidad de cada A y puede calcular su región de patrullaje A sabe el rango de visibilidad de cada A y puede calcular su región de patrullaje 1 1 k k

32
4) Control central con comandos abstractos: Los agentes pueden ejecutar comandos más complejos y tienen cierta planeación limitada A no necesita saber las acciones de los A 's Los agentes pueden ejecutar comandos más complejos y tienen cierta planeación limitada A no necesita saber las acciones de los A 's 1 1 k k
 Control central con comandos abstractos: Los agentes pueden ejecutar comandos más complejos y tienen cierta planeación limitada A no necesita saber las acciones de los A s Los agentes pueden ejecutar comandos más complejos y tienen cierta planeación limitada A no necesita saber las acciones de los A s 1 1 k k")
33
A calcula los comandos de alto nivel para los esclavos y los de bajo nivel para él. El esclavo transmite su posición sólo cuando se le pide o cuando se mueve a una nueva región. A calcula los comandos de alto nivel para los esclavos y los de bajo nivel para él. El esclavo transmite su posición sólo cuando se le pide o cuando se mueve a una nueva región. 1 1

34
Todos los agentes pueden participar en las decisiones globales. Una simplificación es que cada agente comunica toda su información a los otros agentes y todos usen el mismo método global para decidir qué tareas hacer. Todos los agentes pueden participar en las decisiones globales. Una simplificación es que cada agente comunica toda su información a los otros agentes y todos usen el mismo método global para decidir qué tareas hacer. 5) Control distribuido:
 Control distribuido:.")
35
Todos los agentes dan su posición a los otros Todos los agentes dan su posición a los otros Algoritmo: Cada agente calcula la asignación global de agentes a regiones para patrullar y sigue su propia tarea Cada agente calcula la asignación global de agentes a regiones para patrullar y sigue su propia tarea El que detecta a R lo anuncia Cada agente calcula los cuadrantes y se va al que le corresponde Cada agente calcula los cuadrantes y se va al que le corresponde

36
Cada agente anuncia a los otros Cada agente calcula una asignación global (siempre viendo lo óptimo desde una perspectiva global) Cada agente anuncia a los otros Cada agente calcula una asignación global (siempre viendo lo óptimo desde una perspectiva global) Requerimientos:
 Cada agente anuncia a los otros Cada agente calcula una asignación global (siempre viendo lo óptimo desde una perspectiva global) Requerimientos:")
37
Los agentes calculan sus costos locales (información local) pero tratan de optimizar sobre estimaciones globales. 6) Control distribuido + agentes individuales: Se asume que los agentes son “honestos”.
 Control distribuido + agentes individuales: Se asume que los agentes son honestos ..")
38
Cada agente hace una estimación global Algoritmo: Cada agente estima su propio costo de ocupar diferentes regiones en el tablero Cada agente estima su propio costo de ocupar diferentes regiones en el tablero Cada agente anuncia su estimación a los otros agentes Cada agente anuncia su estimación a los otros agentes

39
La información de cada agente puede ser: El estado del medio ambiente (de acuerdo al agente) El estado del medio ambiente (de acuerdo al agente) El problema que el agente quiere resolver El plan abstracto de su ejecución Una agenda de tareas por hacer y de tareas actuales Una agenda de tareas por hacer y de tareas actuales
 El estado del medio ambiente (de acuerdo al agente) El problema que el agente quiere resolver El plan abstracto de su ejecución Una agenda de tareas por hacer y de tareas actuales Una agenda de tareas por hacer y de tareas actuales")
40
Los recursos disponibles (protocolo de acceso, métrica de costo, modelo de uso del recurso, el estado del recurso) Los recursos disponibles (protocolo de acceso, métrica de costo, modelo de uso del recurso, el estado del recurso) Las transiciones de estados legales y las restricciones en el estado del ambiente Las transiciones de estados legales y las restricciones en el estado del ambiente Las habilidades de los agentes (razonamiento, percepción, comunicación, acciónes permisibles) Las habilidades de los agentes (razonamiento, percepción, comunicación, acciónes permisibles) La organización de los agentes
 Los recursos disponibles (protocolo de acceso, métrica de costo, modelo de uso del recurso, el estado del recurso) Las transiciones de estados legales y las restricciones en el estado del ambiente Las transiciones de estados legales y las restricciones en el estado del ambiente Las habilidades de los agentes (razonamiento, percepción, comunicación, acciónes permisibles) Las habilidades de los agentes (razonamiento, percepción, comunicación, acciónes permisibles) La organización de los agentes")
Presentaciones similares