Descargar la presentación
La descarga está en progreso. Por favor, espere

1
CONTROL BASICO DE UN PROCESO ENERGETICO
El Control Automático : INGENIERIA EN ENERGIA CONTROL BASICO DE UN PROCESO ENERGETICO CONTROL PROPORCIONAL César López Aguilar Ing. En Energía – Ing. Mecánico Electricista Ms. En Energía

2
BIBLIOGRAFIA CONTROL AVANZADO DE PROCESOS JOSE ACEDO SANCHEZ CAP. 9

3
CONTROL PROPORCIONAL Mirando al proceso como un balance entre la energía que entra y que sale, está claro que se obtendrá un control más amortiguado manteniendo un caudal estable de vapor en lugar de los saltos de un extremo a otro que produce el control de dos posiciones. Suponiendo que se mantiene el balance de materia, es decir, que la entrada de caudal es igual a la salida, obviamente, para cada caudal de salida del tanque existe una cantidad ideal de vapor que mantendrá la temperatura del líquido en 100 °C. Este concepto sugiere dos modificaciones a la forma de control o estrategia contemplada anteriormente, con el fin de: • Conseguir el estado estacionario. Para ello se debe fijar un caudal de vapor estable que, en condiciones medias de operación, tienda a mantener la temperatura en el valor deseado o set point, es decir, 100 °C. . Compensar variaciones de carga. Una vez que el caudal medio de vapor ha sido establecido, al aumentar o disminuir el error (PV-SP), se deben producir los correspondientes aumentos o disminuciones en el caudal de vapor.
, se deben producir los correspondientes aumentos o disminuciones en el caudal de vapor.")
4
CONTROL PROPORCIONAL De esta forma se establece el concepto de control proporcional, por medio del cual, la acción correctiva de la válvula tiene una cierta proporción con el cambio en el error o desviación entre variable de proceso y Set Point. Las válvulas «A» y «B» del proceso deben modificarse para que actúen de forma proporcional, como aparece en la Figura Esto significa que pueden ser posicionadas a cualquier apertura desde totalmente abiertas a totalmente cerradas. Para ello basta con sustituir las electroválvulas de solenoide por un servoactuador que generalmente es un posicionador neumático. Ahora el operador puede realizar ajustes graduales (proporcionales) en las válvulas al mismo tiempo que observa la desviación de temperatura. Es de esperar que los ajustes sean poco frecuentes si mantiene un caudal de vapor estable y próximo al valor medio necesario por el proceso con el fin de mantener equilibrado el balance de energía.
 en las válvulas al mismo tiempo que observa la desviación de temperatura. Es de esperar que los ajustes sean poco frecuentes si mantiene un caudal de vapor estable y próximo al valor medio necesario por el proceso con el fin de mantener equilibrado el balance de energía.")
5
CONTROL PROPORCIONAL

6
CONTROL PROPORCIONAL De forma gráfica, el control proporcional se puede ver en las Figuras 11.6, 11.7 y El cambio en la posición de la válvula, para un error dado, puede tener distinto valor dependiendo de la relación entre ambos, como se puede ver en estas figuras. En este proceso la variación de carga se produce en la salida de líquido, de forma que al aumentar el caudal disminuye su temperatura, siendo necesario aportar calor adicional para compensar la variación de carga. Se trata, por tanto, de un sistema con acción inversa, el cual hace que la recta de control tenga pendiente negativa, aunque en los cálculos que se realizan aparezca la ganancia con valor positivo.

7
CONTROL PROPORCIONAL : Relación uno a uno
Significa que la válvula se mueve 100 % de su carrera para un ± 50 % en el valor del error, como muestra la Figura Se supone que el rango de control de temperatura está comprendido entre 0 y 200 °C, correspondiendo a los valores 0 y 100 %, y se quiere mantener un Set Point de 100 °C (50 % de rango). La válvula está totalmente abierta a 0 °C y totalmente cerrada a 200 °C, o lo que es igual, totalmente abierta a -50 % de error y totalmente cerrada a +50% de error Ganancia=Kp
. La válvula está totalmente abierta a 0 °C y totalmente cerrada a 200 °C, o lo que es igual, totalmente abierta a -50 % de error y totalmente cerrada a +50% de error. Ganancia=Kp.")
8
CONTROL PROPORCIONAL : Relación menor de uno
Debido a la amplitud y frecuencia de los cambios de carga, puede ser necesario que el proceso requiera un cambio mayor de ± 50 % en el error antes que la válvula se abra o se cierre totalmente, como muestra la Figura En este caso la válvula no llega a abrirse totalmente a 0 °C ni llega a cerrarse totalmente a 200 °C. El rango de actuación de temperatura es el mismo, mientras que la válvula tiene un recorrido comprendido entre 25 y 75 %. Ganancia=Kp

9
CONTROL PROPORCIONAL : Relación mayor de uno
De la misma manera que en el caso anterior, debido a la amplitud y frecuencia de los cambios de carga, puede ser necesario que el proceso requiera un cambio menor de ± 50 % en el error para que la válvula se abra o se cierre totalmente, como muestra la Figura La válvula está totalmente abierta antes de llegar a 0 °C y totalmente cerrada mucho antes de alcanzar los 200 °C. En este caso la válvula tiene todo su rango de actuación, mientras que la temperatura alcanza los valores límite de 50 y 150 °C, o lo que es igual, 25 y 75 % de su rango de calibración. Ganancia=Kp

10
CONTROL PROPORCIONAL : Ganancia proporcional
Matemáticamente el modo de control descrito puede expresarse como: Siendo: Kp = Ganancia Proporcional M = Posición de válvula cuando el error es cero. V = recorrido de la válvula El factor Kp es una medida de la sensibilidad, o ganancia, que debe existir entre error y posición de válvula, es decir: En la Figura 11.6 la pendiente de la recta corresponde exactamente con el rango de actuación del controlador, o lo que es igual, el rango de actuación de la válvula corresponde con el rango de medida de temperatura en valor porcentual, por tanto, la ganancia es igual a 1.

11
CONTROL PROPORCIONAL : Ganancia proporcional
El término ganancia proporcional, o simplemente ganancia, se deriva de las técnicas analíticas de control de procesos al ser el resultado de dividir la salida entre la entrada. En otras palabras, la ganancia es igual a la pendiente de la recta característica de control que aparece en las Figuras 11.6, 11.7 y Históricamente esta proporcionalidad entre error y actuación de la válvula se ha denominado banda proporcional (BP). La banda proporcional es el cambio necesario en la variable de proceso para que la válvula realice su recorrido total. Esto significa que con una banda proporcional del 50 %, la válvula realizará todo su recorrido cuando se produzca un error de ± 25 % entre variable de proceso y Sel Point, como en la Figura En la Figura 11.7 la banda proporcional será igual a 200 %, mientras que en la Figura 11.6 será igual a 100 %. De las definiciones anteriores se tiene que: Kp = 100/BP
. La banda proporcional es el cambio necesario en la variable de proceso para que la válvula realice su recorrido total. Esto significa que con una banda proporcional del 50 %, la válvula realizará todo su recorrido cuando se produzca un error de ± 25 % entre variable de proceso y Sel Point, como en la Figura En la Figura 11.7 la banda proporcional será igual a 200 %, mientras que en la Figura 11.6 será igual a 100 %. De las definiciones anteriores se tiene que: Kp = 100/BP.")
12
CONTROL PROPORCIONAL : Ganancia proporcional
El factor M que aparece en la ecuación anterior es igual a la posición de válvula en la cual se suministra justo la cantidad de vapor necesario para conseguir que la temperatura permanezca en 100 °C, es decir, con error igual a cero, o lo que es igual, PV= SP. El valor de M aparece en las Figuras 11.6, 11.7 y 11.8, conociéndose de forma frecuente con el nombre de reset manual o reajuste manual. Como resumen de lo descrito, para realizar control proporcional se necesitan al menos dos parámetros de ajuste, uno de ellos Kp y otro M. La complejidad de este modo de actuación consiste en conocer los valores de estos dos parámetros para conseguir un buen control

13
Desviación permanente (OffSet)
No es necesario que transcurra mucho tiempo para que el operador de este proceso descubra una seria deficiencia del control proporcional, como es la dificultad de mantener la variable de proceso en el punto de consigna si existen frecuentes cambios de carga, por ejemplo cuando el caudal de salida del tanque aumenta súbitamente. Es evidente que si se desea que la temperatura del líquido se mantenga en 100 °C será necesario suministrar más cantidad de vapor para compensar esta perturbación, llevando la válvula de vapor a una nueva posición. Examinando la ecuación correspondiente al control proporcional, la única manera para que cambie la posición de la válvula será que haya cambiado el error, puesto que M es constante y Kp es la ganancia del controlador ajustada para conseguir el equilibrio en una situación dada.

14
A continuación se muestra un ejemplo para calentamiento de agua en el que se supone que su temperatura a la entrada es de 20 °C, el rango del controlador es de 0 a 200 °C, la ganancia es igual a 2 y la válvula tiene una característica lineal de forma que a plena apertura deja pasar kcal/h, estando abierta el 50 %, que corresponde a kcal/h. Esta situación queda reflejada en la Figura Anteriormente ya se ha mencionado que este proceso tiene acción inversa, por lo que la pendiente de la recta de control es negativa. Aplicando la ecuación de intercambio de calor: Donde: Q = Cantidad de calor (kcal/h) F = Caudal de agua (m³/h) Cp = Calor específico del agua (1 kcal/m³°C) Ts = Temperatura de salida del agua (°C) Te = Temperatura de entrada del agua (°C)
 F = Caudal de agua (m³/h) Cp = Calor específico del agua (1 kcal/m³°C) Ts = Temperatura de salida del agua (°C) Te = Temperatura de entrada del agua (°C)")
15
Con estas condiciones y aplicando la ecuación de intercambio, para obtener una temperatura a la salida de 100 °C se necesitan 80 kcal/h por cada m³ de agua. En efecto, 80 = 1 *1 * (100-20) Puesto que la válvula de vapor se encuentra abierta al 50 % deja pasar kcal/h que permiten calentar 50 m3/h a 100 °C. 4.000 = 50* 1 * (100-20)
 Puesto que la válvula de vapor se encuentra abierta al 50 % deja pasar kcal/h que permiten calentar 50 m3/h a 100 °C = 50* 1 * (100-20)")
16
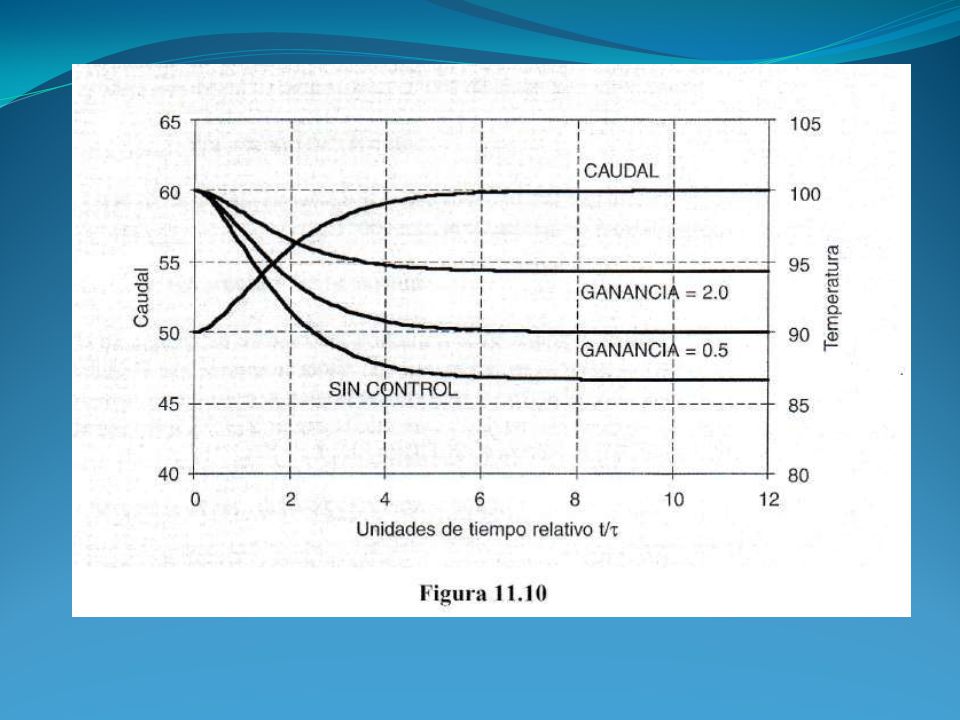
Esta es la situación de equilibrio del balance de energía en el punto medio de la recta que aparece en la Figura Ahora se supone que el caudal aumenta instantáneamente a 60 m³/h. La temperatura empezará a disminuir inmediatamente y si no se toma ninguna acción llegará a estabilizarse en 86,7 °C, que corresponde a la línea que representa sin control en la Figura 4.000 = 60* 1* (Ts- 20) => Ts = 86,7 °C Pero, debido al error y la ganancia proporcional, el controlador abrirá gradualmente la válvula de vapor en la medida en que baja la temperatura del agua en el tanque. Esta acción aumenta el aporte de calorías, tendiendo la temperatura a subir hasta equilibrar el sistema. El equilibrio se puede calcular resolviendo las ecuaciones siguientes: • Ecuación de intercambio: Q=F * Cp * (Ts - Te) • Recta de control Figura 11.9: Q = Kp * Ts + M.
 => Ts = 86,7 °C. Pero, debido al error y la ganancia proporcional, el controlador abrirá gradualmente la válvula de vapor en la medida en que baja la temperatura del agua en el tanque. Esta acción aumenta el aporte de calorías, tendiendo la temperatura a subir hasta equilibrar el sistema. El equilibrio se puede calcular resolviendo las ecuaciones. siguientes: • Ecuación de intercambio: Q=F * Cp * (Ts - Te) • Recta de control Figura 11.9: Q = Kp * Ts + M.")
17
Aplicando la ecuación de la recta a la Figura 11.9 se obtiene:
• Pendiente: • Recta de control: Q=-80* (Ts - 150) = - 80 * Ts Sustituyendo en la ecuación de intercambio queda: Trasladando el resultado a la Figura 11.9 se observa que el equilibrio se obtiene en un nuevo punto de la recta de control, concretamente el correspondiente a los valores 94,3 °C y kcal/h. En la Figura 11.10, la temperatura T = 94,3 °C corresponde a la línea que aparece con ganancia igual a 2. Como se puede ver, se produce una desviación permanente (Off Set = ,3), al haber ocurrido una variación de carga. Si en el ejemplo anterior se repiten los cálculos para una ganancia Kp = 0,5, se obtiene una temperatura de equilibrio de 90 °C. Los cálculos son exactamente igual pero utilizando en el eje de temperaturas un rango entre -100 y +300 °C, como es el caso de la Figura 11.7.
 = - 80 * Ts Sustituyendo en la ecuación de intercambio queda: Trasladando el resultado a la Figura 11.9 se observa que el equilibrio se obtiene en un nuevo punto de la recta de control, concretamente el correspondiente a los valores 94,3 °C y kcal/h. En la Figura 11.10, la temperatura T = 94,3 °C corresponde a la línea que aparece con ganancia igual a 2. Como se puede ver, se produce una desviación permanente (Off Set = ,3), al haber ocurrido una variación de carga. Si en el ejemplo anterior se repiten los cálculos para una ganancia Kp = 0,5, se obtiene una temperatura de equilibrio de 90 °C. Los cálculos son exactamente igual pero utilizando en el eje de temperaturas un rango entre -100 y +300 °C, como es el caso de la Figura")
19
Los dos cálculos anteriores demuestran que, cuanto mayor sea el valor de la ganancia menor será la desviación. El problema es que la ganancia no puede ser aumentada indefinidamente porque el control llegará a ser inestable. Por tanto, es inevitable que permanezca algún error cuando cambia el valor de alimentación o carga, o lo que es igual cuando se producen perturbaciones. Estos conceptos se pueden ver en la Figura

20
Con la situación de equilibrio inicial del ejemplo anterior, partiendo del punto «A» (100 °C, kcal/h), y suponiendo una ganancia Kp = 0,5, al pasar de 50 a 60 m3/h la temperatura se estabilizará en 90 °C siguiendo la recta de control proporcional hasta el punto marcado como «B», con un aporte de calor de kcal/h. 60*1* (90- 20) = kcal/h Para restablecer la temperatura al valor original de 100 °C será necesario aportar la siguiente cantidad de calor: 60*1* ( ) = kcal/h Siguiendo la recta de control es imposible conseguir kcal/h, puesto que la ganancia ha sido previamente ajustada para unas condiciones de proceso, por lo que permanece constante. En caso contrario sería necesario ajustar una ganancia en el controlador para cada cambio de carga. Como consecuencia, para conseguir el aporte adicional de calor sólo existe un camino, y es modificar la ordenada en el origen de la recta de control para que el equilibrio se consiga en el punto «C», desplazando la recta a una nueva posición paralela, tal como aparece en la Figura Le ecuación de la recta es: V=K*T+M
 = kcal/h. Para restablecer la temperatura al valor original de 100 °C será necesario aportar la siguiente cantidad de calor: 60*1* ( ) = kcal/h. Siguiendo la recta de control es imposible conseguir kcal/h, puesto que la ganancia ha sido previamente ajustada para unas condiciones de proceso, por lo que permanece constante. En caso contrario sería necesario ajustar una ganancia en el controlador para cada cambio de carga. Como consecuencia, para conseguir el aporte adicional de calor sólo existe un camino, y es modificar la ordenada en el origen de la recta de control para que el equilibrio se consiga en el punto «C», desplazando la recta a una nueva posición paralela, tal como aparece en la Figura Le ecuación de la recta es: V=K*T+M.")
21
Si la ganancia K permanece constante, matemáticamente la única forma de corregir esta deficiencia es a través de M, o reset manual. La función de este término es obvia. Cuando se modifica el valor de M, se está moviendo la válvula a una nueva posición que permite igualar PV y SP con las nuevas condiciones de carga. En este caso, cuando se produce un incremento en el caudal de salida de agua, la ecuación de control muestra claramente que la única manera para obtener un nuevo valor de V, cuando el error es cero, será modificando M. Esto provoca que, si los cambios de alimentación son frecuentes, sea necesario reajustar M también frecuentemente. Por tanto hace falta disponer de un mejor procedimiento de control que el proporcional.

22
PRACTICA CALIFICADA Para nuestro sistema energético en análisis, el consumo promedio será a una temperatura de 100°C y la temperatura a la entrada es de 25 °C, el rango del controlador es de 0 a 200 °C, y la válvula tiene una característica lineal de forma que a plena apertura deja pasar kcal/h. Dibujar el proceso energético e Indicar la variable controlada, la variable manipulada, el elemento actuador, Hacer el circuito de control de lazo cerrado. Dibujar el diagrama de banda proporcional del proceso para el Kp indicado. A qué temperatura se estabiliza el proceso, si temporalmente se aumenta el caudal a 70 m³/h, sin tomar alguna acción controladora. Indicar el Ofsset y la posición de la válvula, Para el caso anterior, si actúa el controlador para un Kp indicado, a qué temperatura se estabiliza el proceso. Indicar el Ofsset y la posición de la válvula, GRUPO A Kp = GRUPO C Kp = GRUPO E Kp = 0.5 GRUPO B Kp = 2 GRUPO D Kp = 1

Presentaciones similares