Descargar la presentación
La descarga está en progreso. Por favor, espere

1
MOVIMIENTO Una vez se han estudiado y comprendido las estructuras involucradas en el movimiento (huesos, ligamentos, músculos) y los términos usados para describirlas, se debe conocer el lenguaje universal que describen el movimiento desarrollado por estas estructuras
 y los términos usados para describirlas, se debe conocer el lenguaje universal que describen el movimiento desarrollado por estas estructuras.")
2
POSICIÓN ANATÓMICA Y POSICIÓN FUNDAMENTAL
Cuando se describe el movimiento humano hay un punto de partida universalmente aceptado del cual todos los movimientos parten: La posición anatómica. En esta posición todas las articulaciones se consideran en posición neutra o a 0 grados sin que ningún movimiento haya ocurrido. Ocasionalmente se escucha el término posición fundamental cuya diferencia es la posición de las manos. Se prefiere el concepto de posición anatómica dado que la posición de las manos hace imposible algunos movimientos del miembro superior.

3
LOCACIONES ANATÓMICAS
Varios términos se consideran universales para la discusión de la relación espacial una estructura anatómica y otra. Superior: Se refiere a algo que está por encima o más alto que otra estructura (Ej: la cabeza está superior al tórax) Inferior: Significa que algo está abajo o más abajo que otra estructura (Ej: El tórax está inferior a la cabeza) Lateral: Se refiere a algo que está más allá de la línea media del cuerpo de otra estructura (Ej: Los brazos están lateral a la columna vertebral) Medial: Significa que una estructura está más cerca de la línea media del cuerpo que otra estructura (Ej: La nariz está medial a las orejas)
 Inferior: Significa que algo está abajo o más abajo que otra estructura (Ej: El tórax está inferior a la cabeza) Lateral: Se refiere a algo que está más allá de la línea media del cuerpo de otra estructura (Ej: Los brazos están lateral a la columna vertebral) Medial: Significa que una estructura está más cerca de la línea media del cuerpo que otra estructura (Ej: La nariz está medial a las orejas)")
4
LOCACIONES ANATÓMICAS
Anterior: Se refiere a una estructura que está delante de otra (Ej: el abdomen está anterior a la columna) Posterior: Se refiere a una estructura que está detrás de otra estructura (Ej: La columna está posterior al abdomen) Proximal: Significa cerca al centro del cuerpo (Ej: La rodilla es proximal al tobillo) Distal: Significa alejado del centro del cuerpo (Ej: La mano se encuentra distal a la muñeca) Dorsal: Indica el lado de encima de una estructura tal como la aleta dorsal localizada encima del dorso del pez (Ej: El aspecto dorsal de la mano se llama el dorso de la mano o espalda de la mano)
 Posterior: Se refiere a una estructura que está detrás de otra estructura (Ej: La columna está posterior al abdomen) Proximal: Significa cerca al centro del cuerpo (Ej: La rodilla es proximal al tobillo) Distal: Significa alejado del centro del cuerpo (Ej: La mano se encuentra distal a la muñeca) Dorsal: Indica el lado de encima de una estructura tal como la aleta dorsal localizada encima del dorso del pez (Ej: El aspecto dorsal de la mano se llama el dorso de la mano o espalda de la mano)")
5
LOCACIONES ANATÓMICAS
Volar: Se refiere al lado de abajo o al aspecto inferior de una estructura (Ej: Al aspecto volar de la mano se le denomina palmar mientras que el aspecto volar del pie se le llama plantar) Pronación: Se refiere a la rotación de un miembro desde su posición anatómica hacia el cuerpo. (Existe pronación del antebrazo y también del pie) Supinación: Se refiere a la rotación de un miembro cuando inicia un alejamiento del cuerpo. (Existe también en el antebrazo y el pie) Desviación ulnar (Aducción ulnar ):Es el movimiento lateral de la muñeca en dirección a la ulna Desviación radial (Abducción radial): Es el movimiento lateral de la muñeca en dirección al radio
 Pronación: Se refiere a la rotación de un miembro desde su posición anatómica hacia el cuerpo. (Existe pronación del antebrazo y también del pie) Supinación: Se refiere a la rotación de un miembro cuando inicia un alejamiento del cuerpo. (Existe también en el antebrazo y el pie) Desviación ulnar (Aducción ulnar ):Es el movimiento lateral de la muñeca en dirección a la ulna. Desviación radial (Abducción radial): Es el movimiento lateral de la muñeca en dirección al radio.")
6
PLANOS Y EJES El movimiento humano que se da desde la posición anatómica es descrito como tomando lugar en un plano (una superficie plana) alrededor de un eje (una línea derecha alrededor de la cual rota un objeto). La posición anatómica es el punto de inicio el movimiento. Los músculos crean el movimiento de los segmentos del cuerpo en varios planos que dividen el cuerpo en diferentes partes. Los tres planos específicos son perpendiculares (en ángulos rectos) entre si. Los tres planos específicos son: PLANO SAGITAL PLANO HORIZONTAL PLANO FRONTAL
 alrededor de un eje (una línea derecha alrededor de la cual rota un objeto). La posición anatómica es el punto de inicio el movimiento. Los músculos crean el movimiento de los segmentos del cuerpo en varios planos que dividen el cuerpo en diferentes partes. Los tres planos específicos son perpendiculares (en ángulos rectos) entre si. Los tres planos específicos son: PLANO SAGITAL. PLANO HORIZONTAL. PLANO FRONTAL.")
7
PLANO SAGITAL El plano sagital, también llamado plano anteroposterior pasa desde el frente hasta la espalda del cuerpo, creando un lado izquierdo y un lado derecho del cuerpo. Puede haber cualquier número de planos sagitales pero existe un único plano cardinal sagital que divide el cuerpo en segmentos iguales con exactamente la mitad del cuerpo en cada lado del plano cardinal. El plano cardinal aparece en algunos textos como plano principal y estos términos son intercambiables

8
PLANO HORIZONTAL El plano horizontal también conocido como plano transversal atraviesa el cuerpo horizontalmente dividiendo el cuerpo en dos segmentos, uno arriba y otro abajo. Pueden existir cualquier cantidad de planos transversales pero existe solo un plano cardinal horizontal que divide el cuerpo en iguales proporciones arriba y abajo.

9
PLANO FRONTAL El plano frontal también conocido como plano lateral atraviesa el cuerpo de un lado a otro creando un lado adelante y un lado atrás. Puede existir cualquier número de planos frontales pero existe solo un plano cardinal frontal el cual divide el cuerpo en partes iguales adelante y atrás

10
CENTRO DE GRAVEDAD El punto de intersección de todos los tres planos cardinales es el centro de gravedad del cuerpo. Cuando todos los segmentos del cuerpo se combinan y el cuerpo es considerado una estructura sólida en la posición anatómica, el centro de gravedad se ubica aproximadamente en la parte baja de la columna lumbar. Si las partes del cuerpo se mueven desde la posición anatómica o cambia el peso del cuerpo por su aumento o disminución o por llevar cargas como pesas, la ubicación del centro de gravedad cambia.

11
EJES DEL CUERPO Eje frontal horizontal Eje vertical
Un eje es una línea recta alrededor de la cual rota un objeto. En el cuerpo humano se pintan la articulaciones como ejes y los huesos como los objetos que rotan alrededor de ellas en un plano perpendicular al eje. Existen tres ejes principales y la rotación se describe como si ocurriera en un plano alrededor del eje que es perpendicular al plano y lo atraviesa por todo su centro. Los ejes son: Eje frontal horizontal Eje vertical Eje sagital horizontal

12
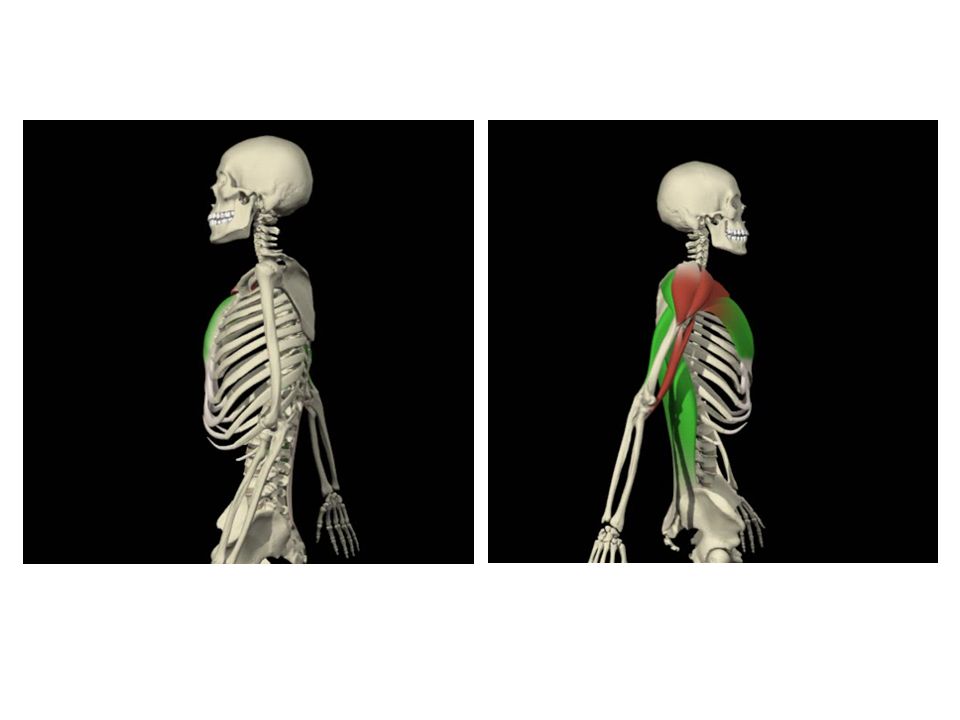
SENTIDO DE ROTACIÓN DEL EJE FRONTAL HORIZONTAL
El plano sagital rota alrededor del eje frontal horizontal. La rodilla es un eje frontal horizontal y el miembro inferior es el objeto que se mueve en el plano sagital cuando se dobla la rodilla

13
SENTIDO DE ROTACIÓN DEL EJE VERTICAL
El plano horizontal rota alrededor del eje vertical (longitudinal). Cuando se rota la cabeza de izquierda a derecha (cuando decimos no gestualmente), la cabeza rota en un plano horizontal alrededor del eje vertical creado por la columna en la articulación en pivote atlanto-odontoidea
. Cuando se rota la cabeza de izquierda a derecha (cuando decimos no gestualmente), la cabeza rota en un plano horizontal alrededor del eje vertical creado por la columna en la articulación en pivote atlanto-odontoidea.")
14
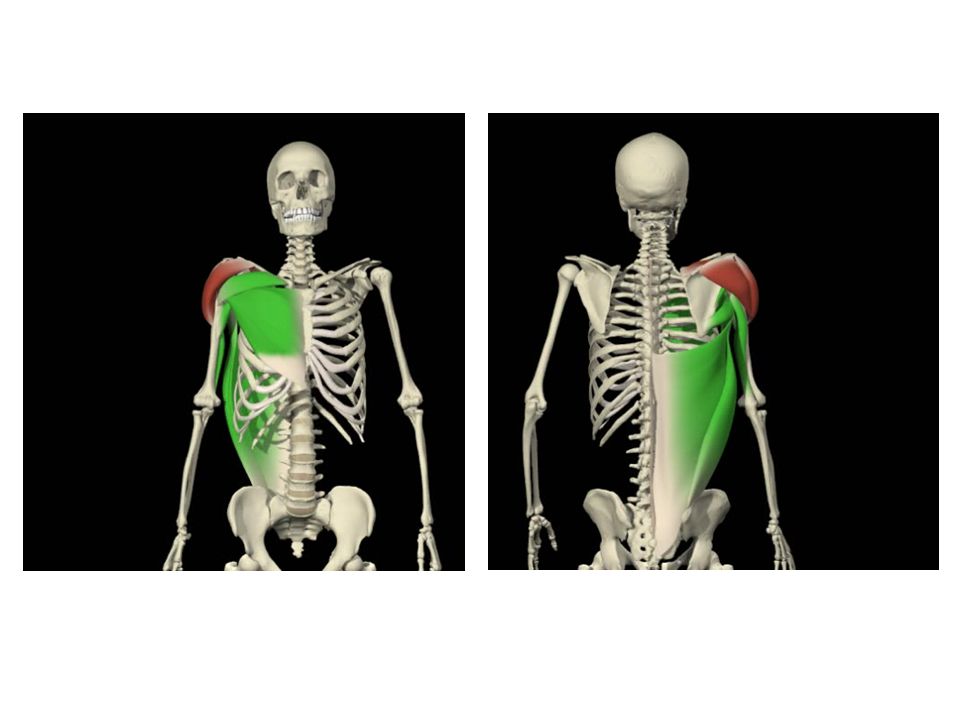
SENTIDO DE ROTACIÓN DEL EJE SAGITAL HORIZONTAL
El plano frontal rota alrededor el eje sagital horizontal. Cuando se levanta el brazo hacia un lado, el hombro es el eje sagital horizontal y el brazo es el objeto que se mueve en el plano frontal

15
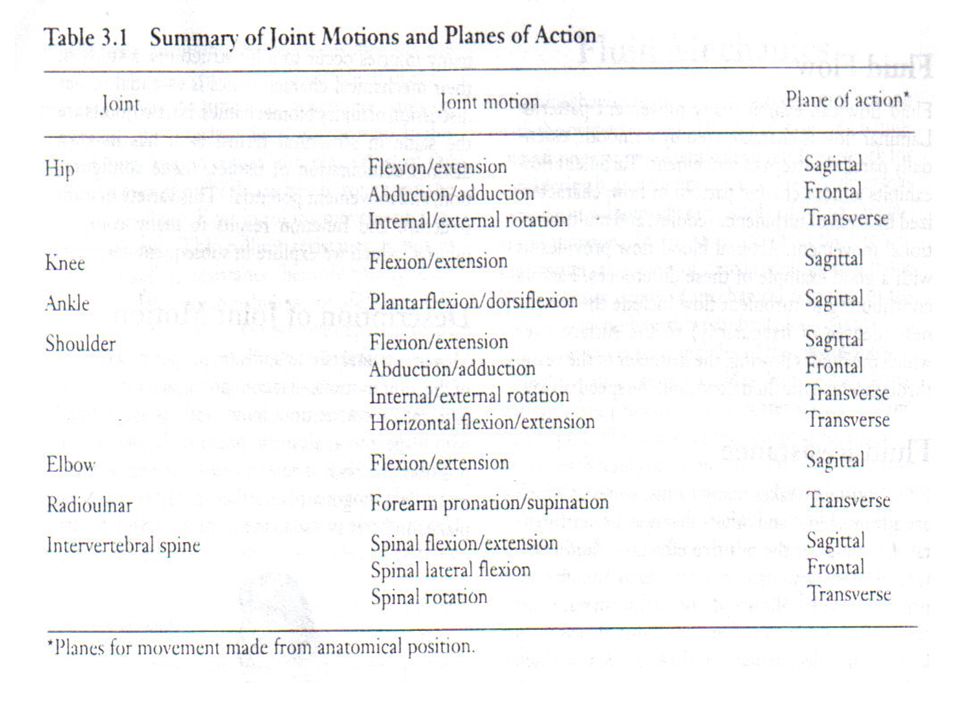
PLANOS, EJES Y MOVIMIENTOS FUNDAMENTALES
SAGITAL (anteroposterior) FRONTAL HORIZONTAL FLEXIÓN Y EXTENSIÓN FRONTAL (lateral) SAGITAL HORIZONTAL ADUCCIÓN Y ABEDUCCIÓN HORIZONTAL (transversal VERTICAL ROTACIÓN
 FRONTAL HORIZONTAL. FLEXIÓN Y EXTENSIÓN. FRONTAL. (lateral) SAGITAL HORIZONTAL. ADUCCIÓN Y ABEDUCCIÓN. HORIZONTAL. (transversal. VERTICAL. ROTACIÓN.")
16
MOVIMIENTOS FUNDAMENTALES
Se debe recordar que los movimientos toman lugar en un plano alrededor de un eje. Existen tres planos y tres ejes con dos movimientos fundamentales en cada plano

17
FELXIÓN Y EXTENSIÓN En el plano sagital los movimientos fundamentales son la flexión y la extensión. La flexión se define como el decrecimiento del ángulo formado por los huesos de una articulación. La extensión se define como el incremento del ángulo formado por los huesos de una articulación. Retornar una articulación en flexión a su posición anatómica se considera extensión

19
ABDUCCIÓN Y ADUCCIÓN Los movimientos fundamentales en el plano frontal son la abducción y aducción. La abducción se define como el movimiento de alejamiento desde la línea media del cuerpo. El movimiento hacia la línea media del cuerpo se define como aducción. El retorno desde una posición de abducción hacia la posición anatómica se considera aducción

21
ROTACIÓN INTERNA Y ROTACIÓN EXTERNA
Los movimientos fundamentales en el plano horizontal son de rotación. Cuando la superficie anterior del miembro superior o inferior se aleja de línea media del cuerpo (o rota lateralmente), a este movimiento se le denomina rotación externa o rotación lateral. Cuando la superficie anterior del miembro superior o inferior se acerca a la línea media del cuerpo (o rota medialmente), a este movimientos se le denomina rotación interna o rotación medial.
, a este movimiento se le denomina rotación externa o rotación lateral. Cuando la superficie anterior del miembro superior o inferior se acerca a la línea media del cuerpo (o rota medialmente), a este movimientos se le denomina rotación interna o rotación medial.")
23
CIRCUNDUCCIÓN Las articulaciones capaces de crear movimiento en dos planos (biaxiales) y en tres planos (triaxiales) pueden producir otro movimiento denominado circunducción. La circunducción combina dos o más movimientos fundamentales, no es considerado por tanto un movimiento fundamental de una articulación
 y en tres planos (triaxiales) pueden producir otro movimiento denominado circunducción. La circunducción combina dos o más movimientos fundamentales, no es considerado por tanto un movimiento fundamental de una articulación.")
26
SISTEMAS DE PALANCAS La mayor parte de los movimientos articulares resultan del comportamiento de las estructuras corporales actuando como sistemas de palancas. Una palanca es una estructura rígida, fija en un solo punto, a la cual dos fuerzas se aplican en dos puntos diferentes. Una de las fuerzas es denominada resistencia, la otra es denominada fuerza aplicada y el punto fijo es conocido como pivote o fulcro y es el punto sobre el cual la palanca rota. En el cuerpo humano, estos tres componentes son típicamente una resistencia externa o fuerza aplicada, la fuerza muscular y una articulación como eje de rotación.

27
CLASIFICACIÓN DE LOS SISTEMAS DE PALANCAS
Los componentes de los sistemas de palancas se relacionan espacialmente unos con otros en tres configuraciones diferentes: Palanca de primera clase : El fulcro se encuentra entre la resistencia y la fuerza aplicada Palanca de segunda clase: Tiene la resistencia entre al fuerza aplicada y el fulcro Palanca de tercera clase: Tiene la fuerza aplicada entre la resistencia y el fulcro

28
CLASES DE PALANCAS EN EL CUERPO HUMANO
Las articulaciones del cuerpo humano son predominantemente palancas de tercera clase, con algunas palancas de primera clase y muy pocas con sistema de palanca de segunda clase.

29
FUNCIONES DE LOS SISTEMAS DE PALANCAS EN EL CUERPO HUMANO
Los sistemas de palancas en el cuerpo humano proveen dos importantes funciones: Incrementan el efecto de la fuerza aplicada Incrementan la velocidad efectiva del movimiento AHORA VEREMOS ALGUNOS CONCEPTOS BÁSICOS DE LA MECÁNICA DEL MOVIMIENTO CORPORAL!!!!!

30
MOMENTO DE FUERZA (TORQUE) Y EL MOVIMIENTO ARTICULAR
Se define torque o momento de fuerza como el efecto de una fuerza que tiende a causar rotación alrededor de un eje. Con respecto a la función articular, los momentos creados por la acción de los músculos esqueléticos son los elementos esenciales en el control del movimiento articular. Generalmente, la fuerza muscular actúa a una distancia perpendicular (d) desde el eje articular (e) produciendo un momento de fuerza M = F x d
 desde el eje articular (e) produciendo un momento de fuerza M = F x d.")
31
CENTRO DE ROTACIÓN ARTICULAR INSTANTÁNEO
A medida que la articulación se mueve en su rango de movimiento, la línea de acción músculo-tendinosa (la dirección de tracción) cambia contínuamente, afectando momento por el cambio de longitud del brazo de palanca. Por tanto, la locación del eje de rotación relativo a las estructuras óseas en cualquier instante en el tiempo (centro articular instantáneo) cambia también. Estos cambios en la fuerza muscular, sus líneas de acción y brazo de palanca resultan en una variación continua del momento de fuerza
 cambia contínuamente, afectando momento por el cambio de longitud del brazo de palanca. Por tanto, la locación del eje de rotación relativo a las estructuras óseas en cualquier instante en el tiempo (centro articular instantáneo) cambia también. Estos cambios en la fuerza muscular, sus líneas de acción y brazo de palanca resultan en una variación continua del momento de fuerza.")
32
CENTRO DE ROTACIÓN ARTICULAR INSTANTÁNEO
La asimetría del movimiento articular que conlleva el cambio del movimiento del centro articular instantáneo es causado por una combinación de tres movimientos básicos: Rotación: El movimiento es puramente angular con rotación sobre un eje fijo. Deslizamiento: Ocurre cuando una superficie articular se mueve linealmente respecto a otra. Rodaje: Es un movimiento articular angular combinado con desplazamiento lineal del eje de rotación.

33
STRESS Y STRAIN Cualquier tejido, cuando se carga, desarrolla una resistencia interna a la carga externa. En el caso de una banda elástica, la resistencia es mínima, en contraste, para el acero, es bastante considerable. Esta resistencia interna a las cargas axiales, es común a todos los materiales y en mecánica se denomina STRESS. El stress se puede categorizar en COMPRESIVO, TENSIL Y SHEAR. La unidad internacional para el stress es el pascal (Pa) definido como 1 N distribuido sobre un metro cuadrado (1 N*m2)
 definido como 1 N distribuido sobre un metro cuadrado (1 N*m2)")
34
STRESS Y STRAIN Los materiales pueden cambiar su forma, aunque algunas veces imperceptiblemente, cuando están sujetos a cargas externas. Este cambio en la forma se denomina deformación y es medido por el STRAIN mecánico. Cuando un material se elonga debido a una carga tensil obtenemos un strain tensil; ante una compresión axial resulta un strain compresivo y una carga en shear termina en un shear strain

35
FUERZAS DE REACCIÓN ARTICULAR (JRF)
Las fuerzas experimentadas por las superficies articulares pueden ser de considerable magnitud, tales como las que soporta la rodilla durante la carrera o el salto. Repetidas cargas de alto impacto pueden conducir a lesiones de menisco, cartílago articular y degeneración. La efecto neto de los músculos y otros factores que actúan sobre la articulación es llamado FUERZA DE REACCIÓN ARTICULAR (JRF)
")
Presentaciones similares


>")

















