Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Brazo robótico Un brazo robótico es un tipo de brazo mecánico, normalmente programable, con funciones parecidas a las de un brazo humano; este puede ser la suma total del mecanismo o puede ser parte de un robot más complejo.

2
Tipos De Brazos Roboticos
Robot Cartesiano: Usado para trabajos de “pick and place” (tomar y colocar). Robot cilíndrico: Usado para operaciones de ensamblaje, manipulación de máquinas herramientas, soldadura por punto. Robot Paralelo: Uno de los usos es la plataforma móvil que manipula las cabinas de los simuladores de vuelo. Leiamos recien que un brazo robotico es un dispositivo normalmente programable. Pero como hacemos eso? Que necesitamos?
. Robot cilíndrico: Usado para operaciones de ensamblaje, manipulación de máquinas herramientas, soldadura por punto. Robot Paralelo: Uno de los usos es la plataforma móvil que manipula las cabinas de los simuladores de vuelo. Leiamos recien que un brazo robotico es un dispositivo normalmente programable. Pero como hacemos eso Que necesitamos")
3
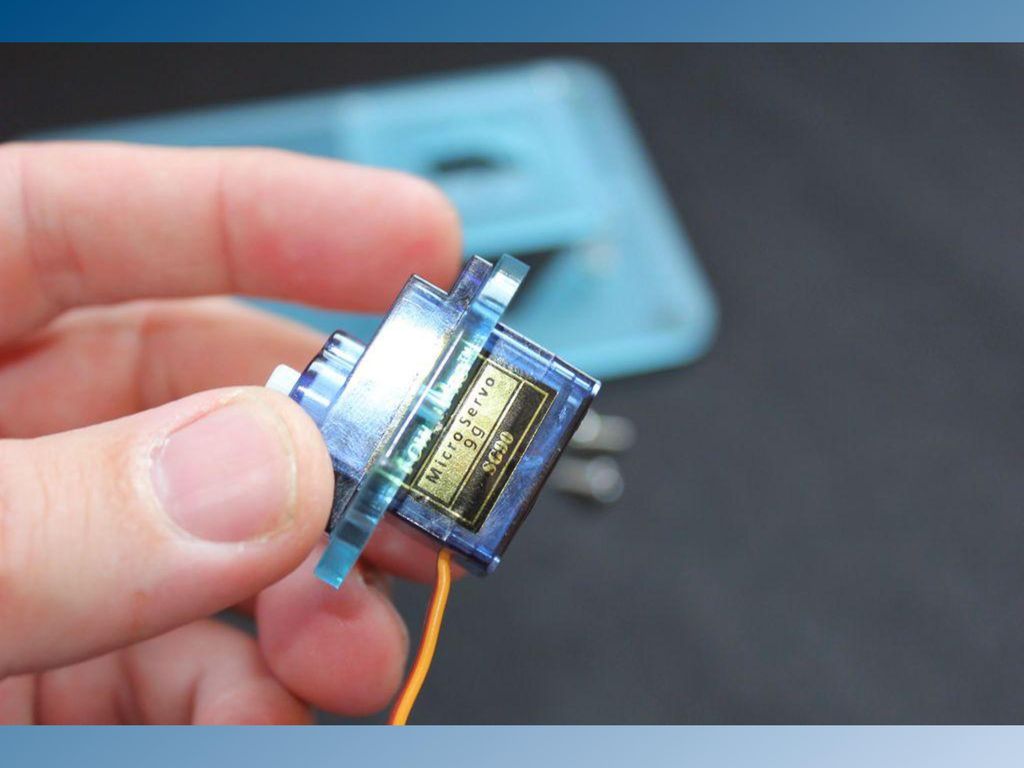
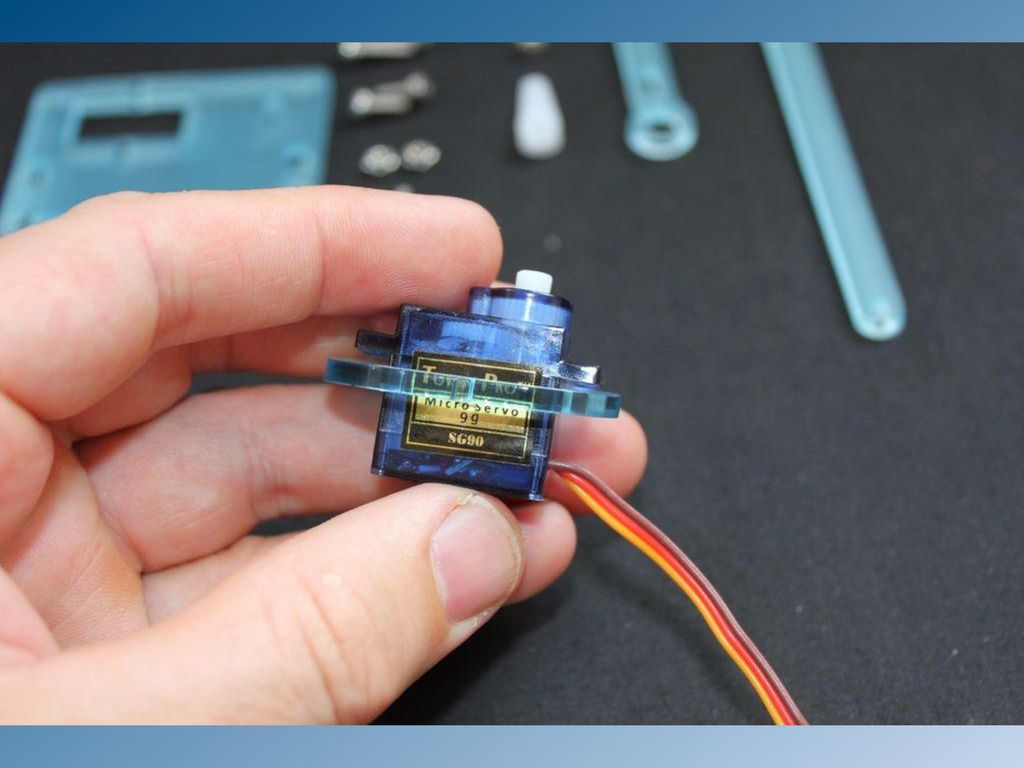
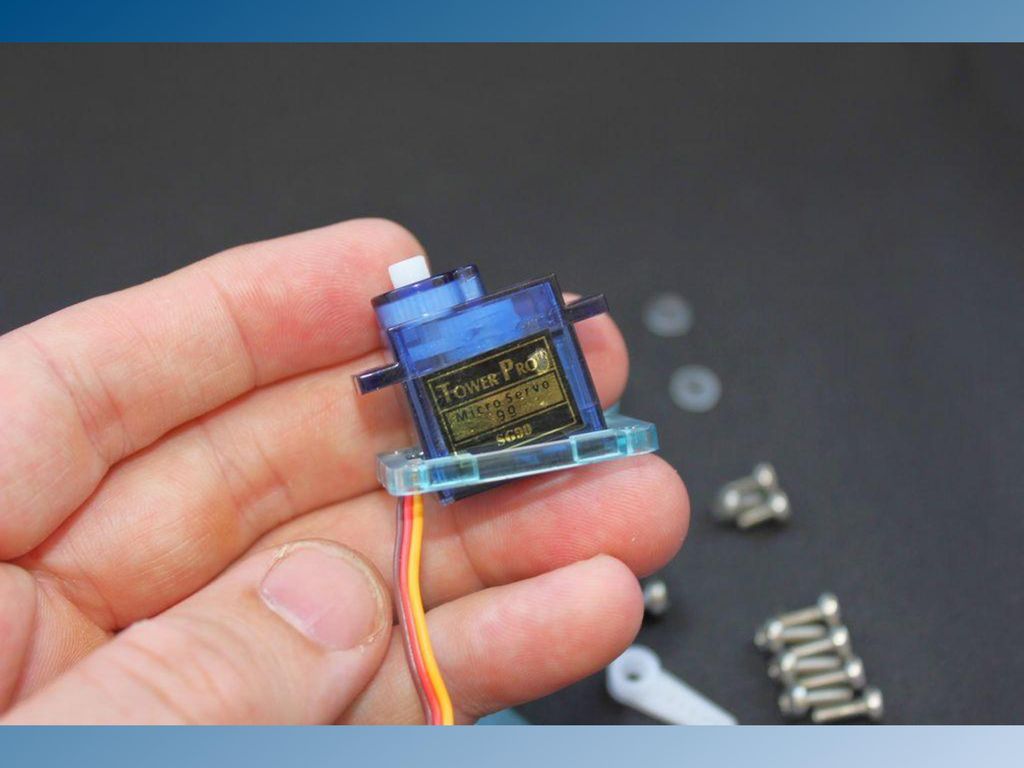
Servomotor Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición. Un servomotor es un motor eléctrico que puede ser controlado tanto en velocidad como en posición. PARA QUE UN BRAZO SEA PROGRAMABLE NECESITAMOS MOTORES QUE NOS PERMITAN ESO
 es un dispositivo similar a un motor de corriente continua tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición. Un servomotor es un motor eléctrico que puede ser controlado tanto en velocidad como en posición. PARA QUE UN BRAZO SEA PROGRAMABLE NECESITAMOS MOTORES QUE NOS PERMITAN ESO.")
4
Placa Arduino

5
Que es Arduino? Qué es arduino?
Arduino es una plataforma de prototipos electrónica de código abierto (open-source) basada en hardware y software flexibles y fáciles de usar. Arduino es una plataforma de hardware libre, basada en una placa con un microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de la electrónica en proyectos multidisciplinares. Arduino se puede comparar con Android. Versiones de SO >> Versiones de placa. Cosas para las que se usa >> Idem Abierto a la comunidad Son una herramieta.
 basada en hardware y software flexibles y fáciles de usar. Arduino es una plataforma de hardware libre, basada en una placa con un microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de la electrónica en proyectos multidisciplinares. Arduino se puede comparar con Android. Versiones de SO >> Versiones de placa. Cosas para las que se usa >> Idem. Abierto a la comunidad. Son una herramieta.")
6
Como funciona? Arduino puede tomar información del entorno a través de sus entradas analógicas y digitales. conocidas como Sensores. Además, puede controlar luces, motores etc, conocidos como Actuadores, a través de sus salidas digitales. Arduino es como un cerebro…

7
Sensores o Entradas Actuadores o Salidas
Las entradas o Inputs: Son sensores electrónicos o mecánicos que toman las señales (en forma de temperatura, presión, humedad, contacto, luz, movimiento, pH etc.) del mundo físico y las convierten en señales de corriente o voltaje. Por ejemplo un sensor de temperatura, un pulsador, una fotocelda, un potenciómetro, un sensor de movimiento entre muchos más. Las salidas u Outputs son actuadores u otros dispositivos (también transductores) que convierten las señales de corriente o voltaje en señales físicamente útiles como movimiento, luz, sonido, fuerza, rotación entre otros. Por ejemplo: un display que registre la temperatura, un LED o sistema de luces que se encienda automáticamente cuando esté oscureciendo, un motor, un buzzer que genere diversos tonos.
 del mundo físico y las convierten en señales de corriente o voltaje. Por ejemplo un sensor de temperatura, un pulsador, una fotocelda, un potenciómetro, un sensor de movimiento entre muchos más. Las salidas u Outputs son actuadores u otros dispositivos (también transductores) que convierten las señales de corriente o voltaje en señales físicamente útiles como movimiento, luz, sonido, fuerza, rotación entre otros. Por ejemplo: un display que registre la temperatura, un LED o sistema de luces que se encienda automáticamente cuando esté oscureciendo, un motor, un buzzer que genere diversos tonos.")
8
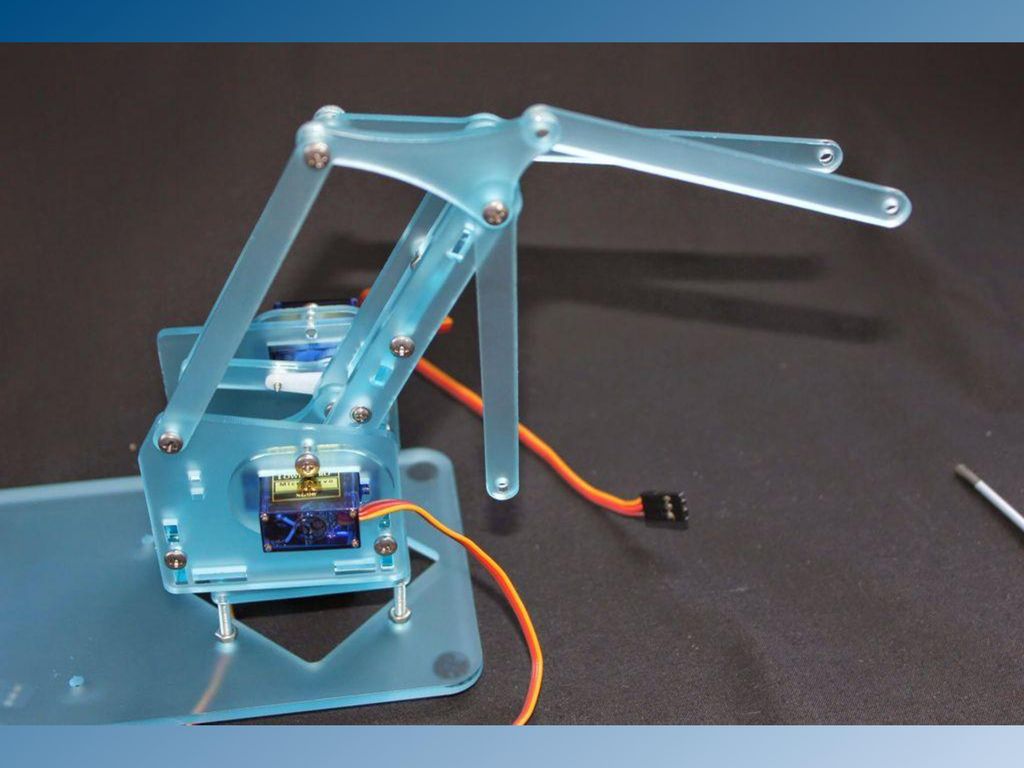
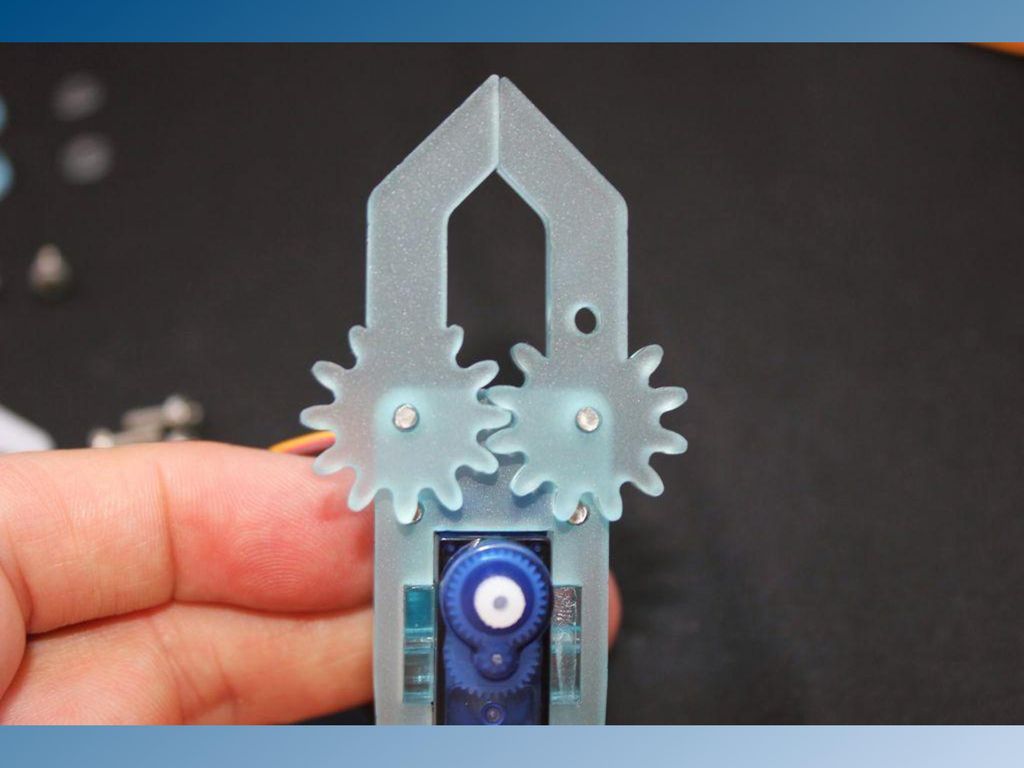
Brazo Robotico

9
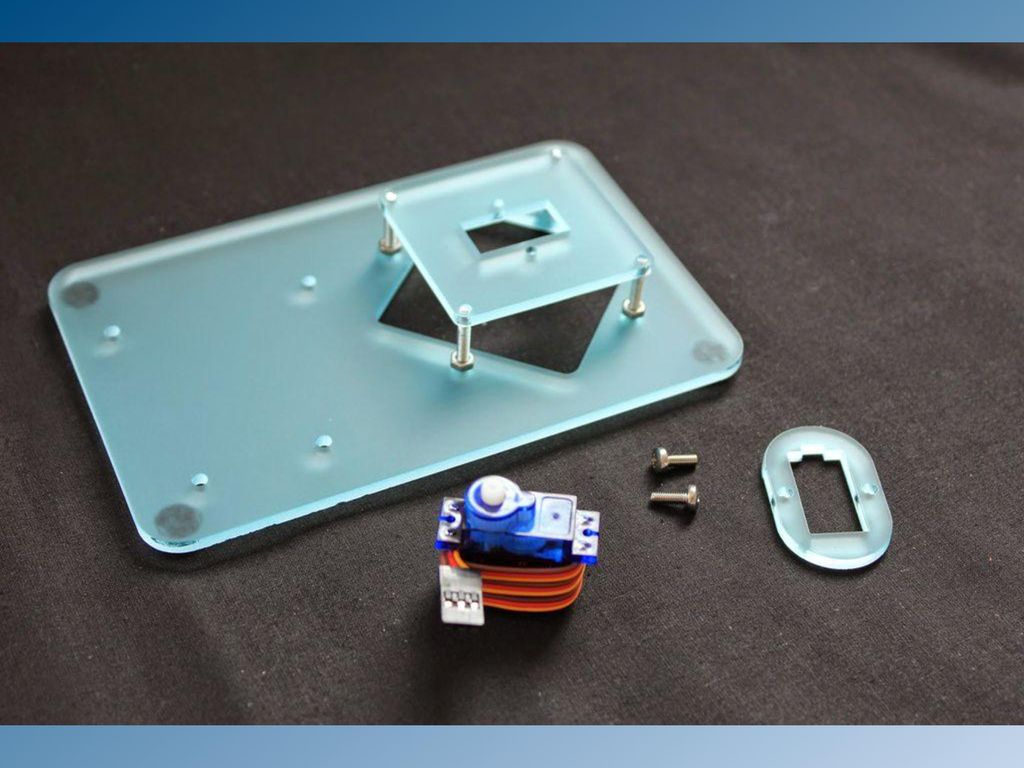
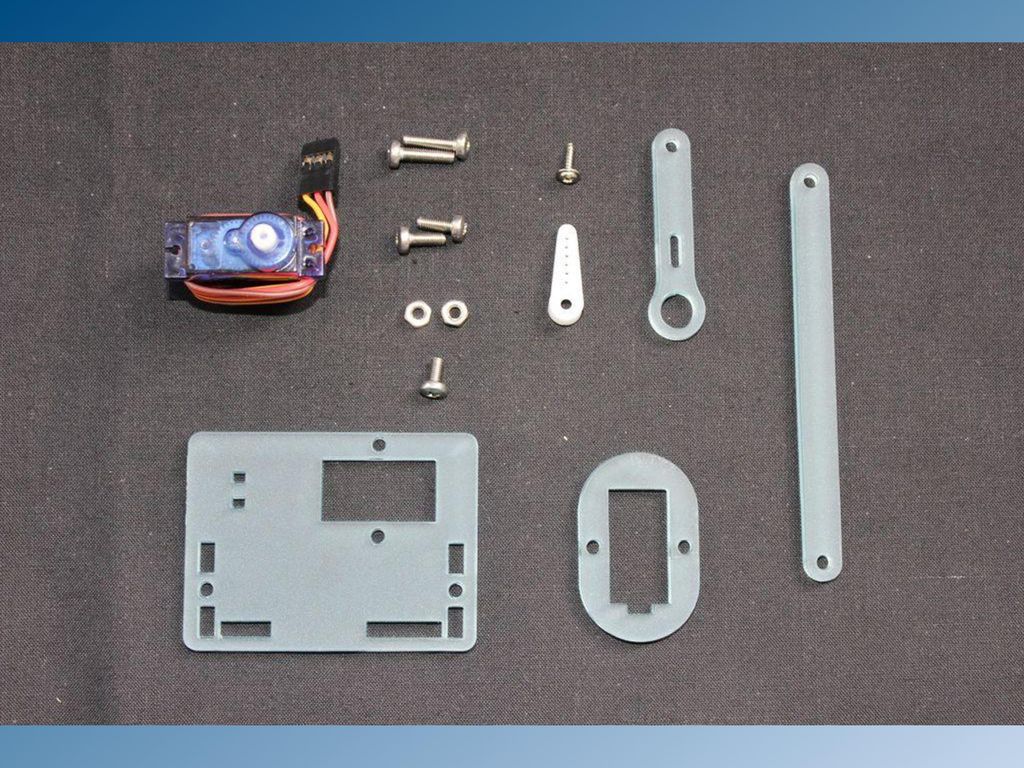
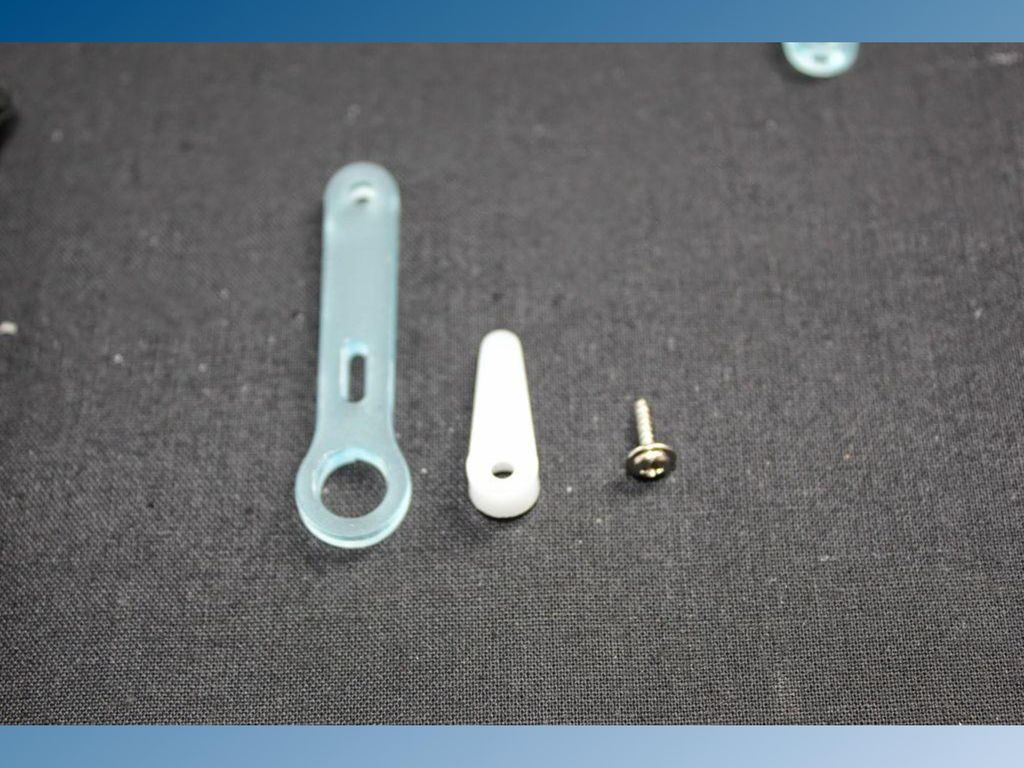
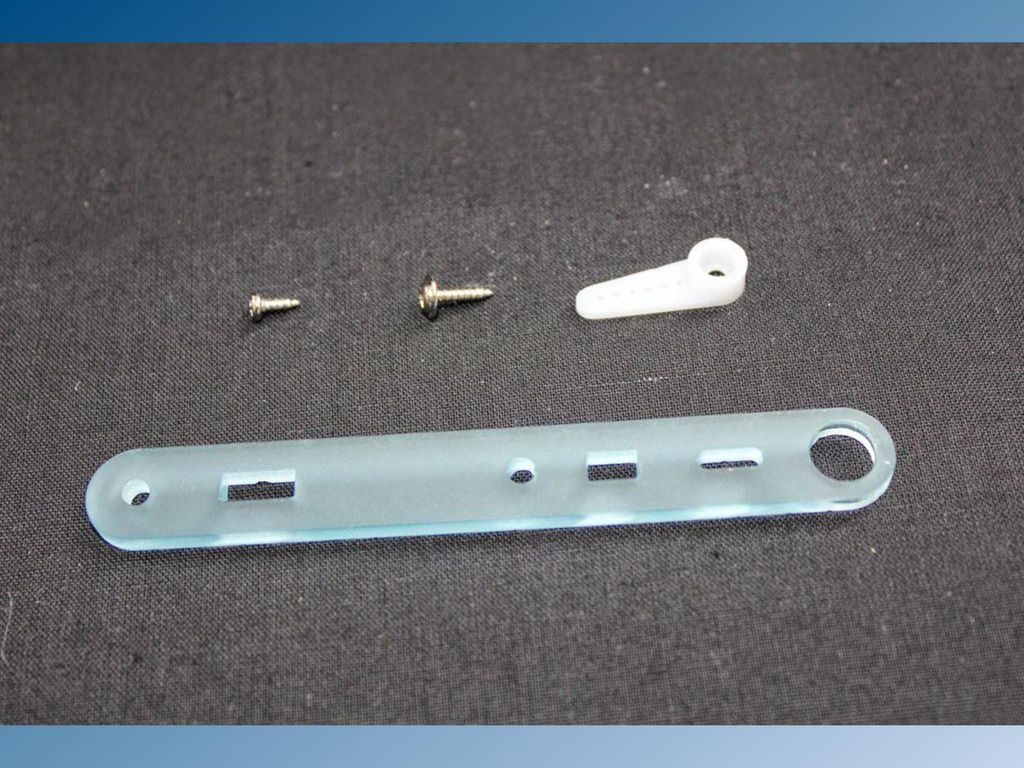
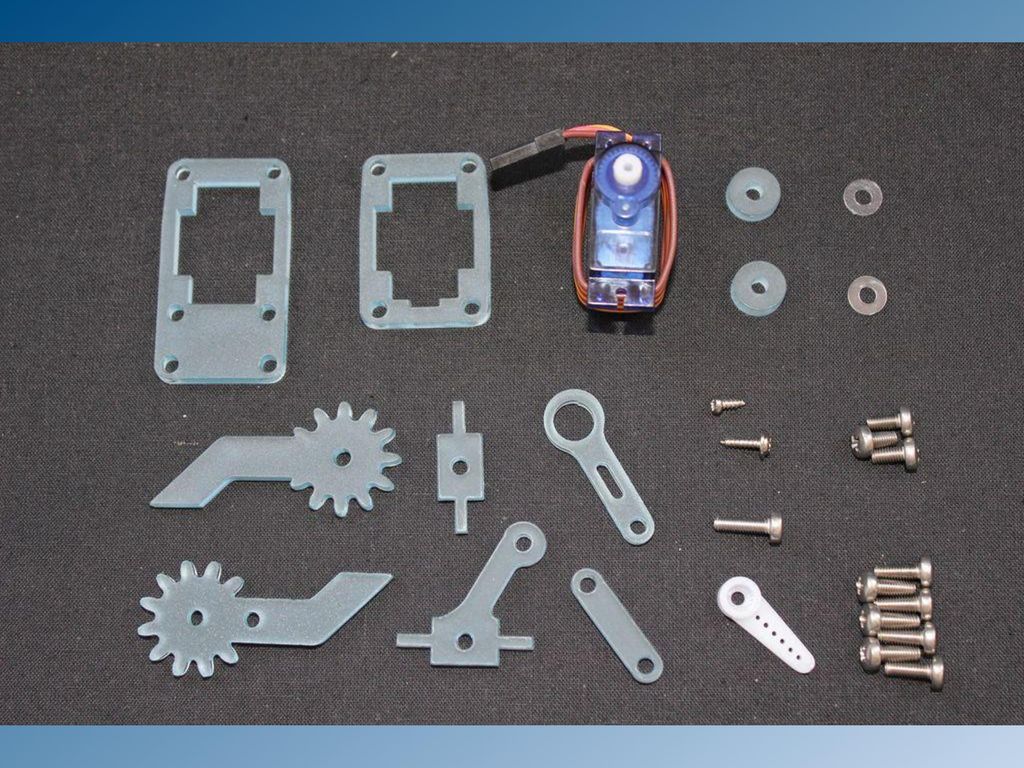
Piezas para la primera base Piezas para la base del brazo
Piezas para la garra Piezas para el brazo Encastres de los servos

10
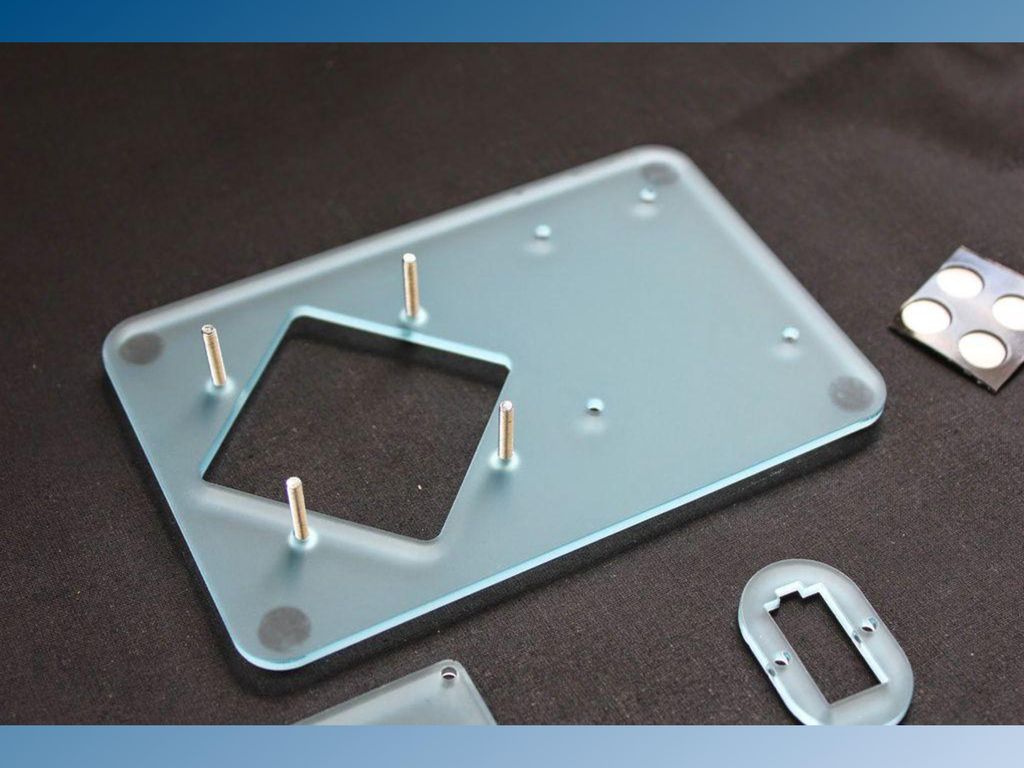
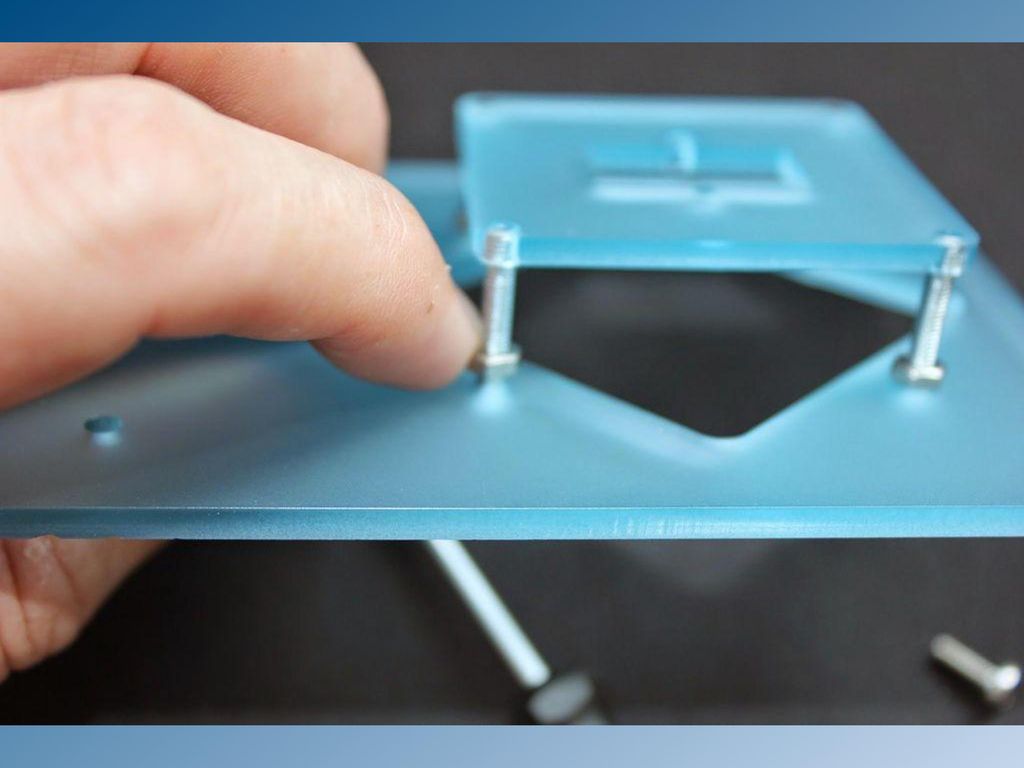
Base – Pieza Cuadrada – Encastre para Servo

11
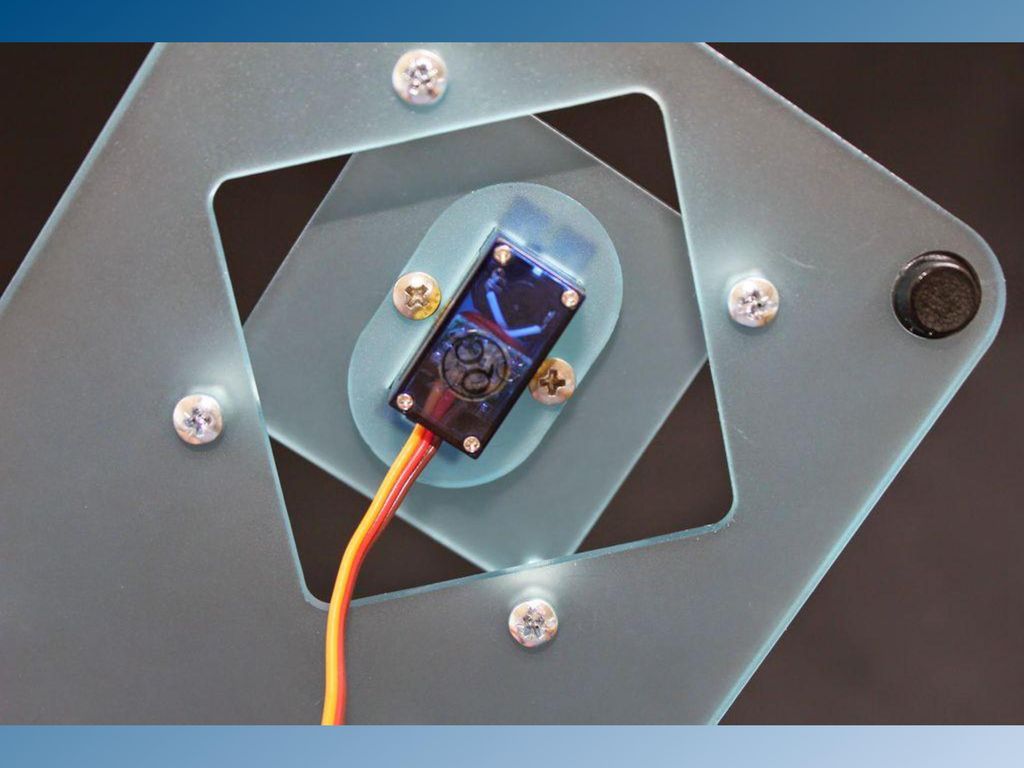
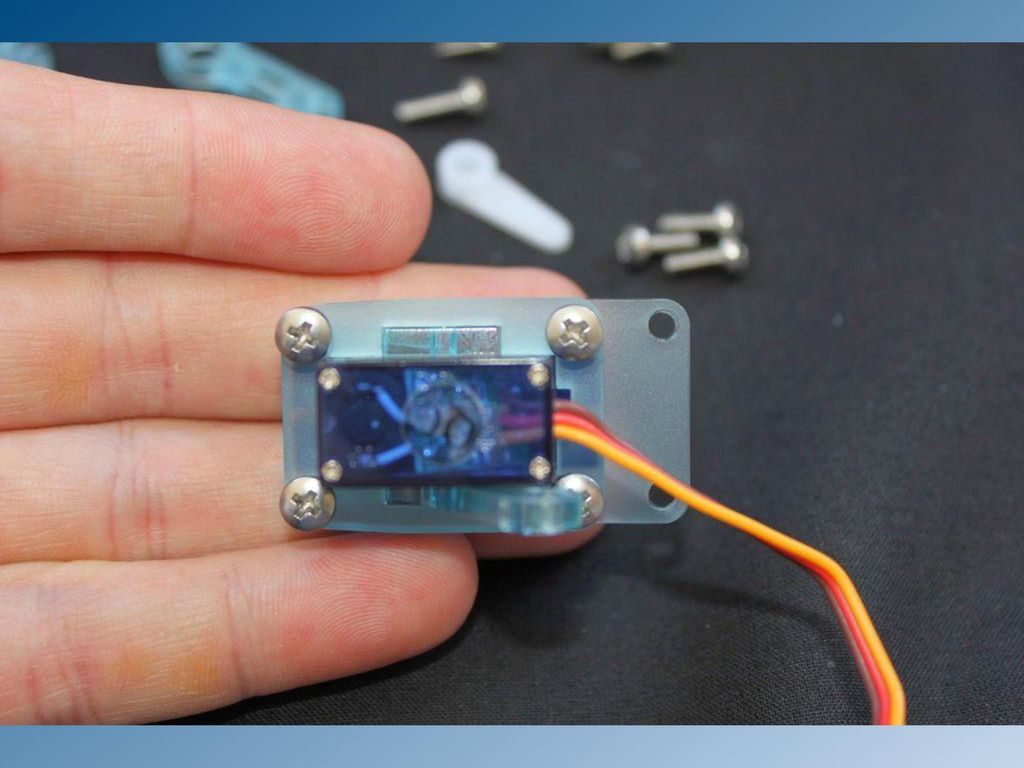
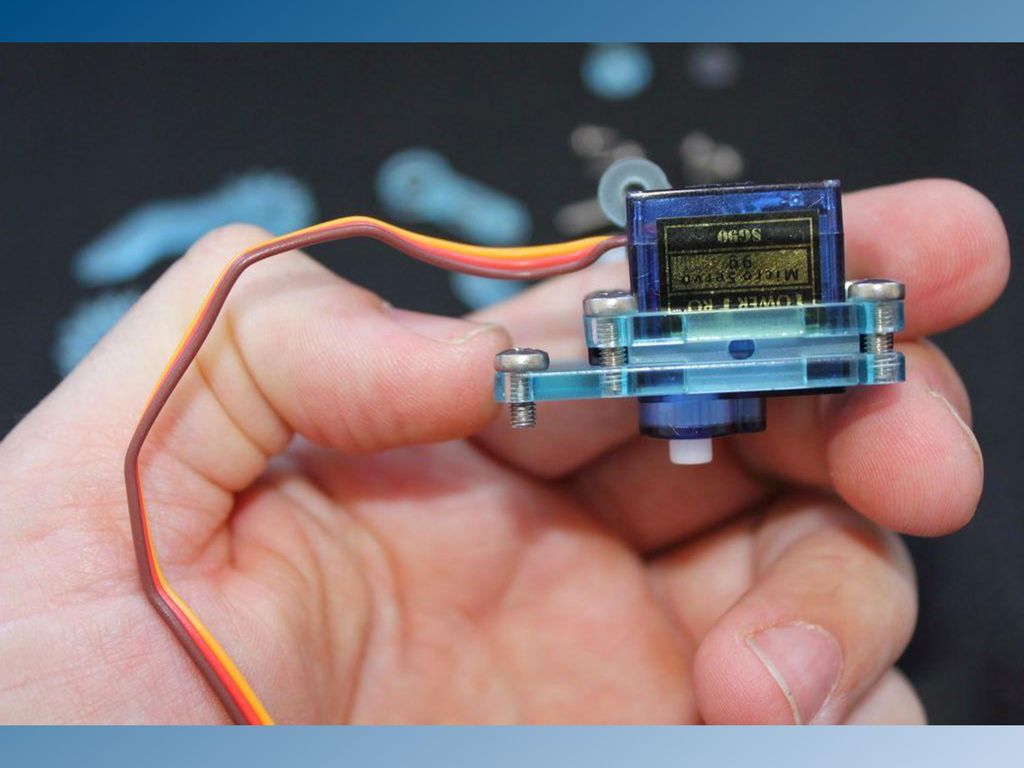
Se colocan los 4 tornillos

13
NO HAY QUE AJUSTAR LAS TUERCAS!!!!!

14
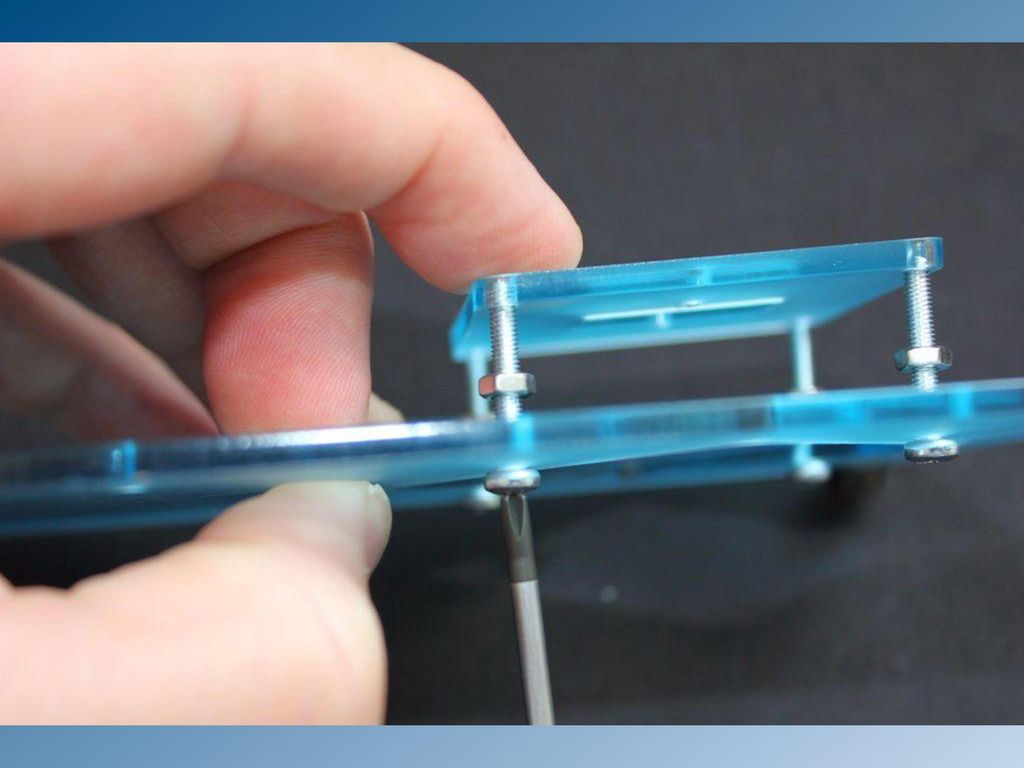
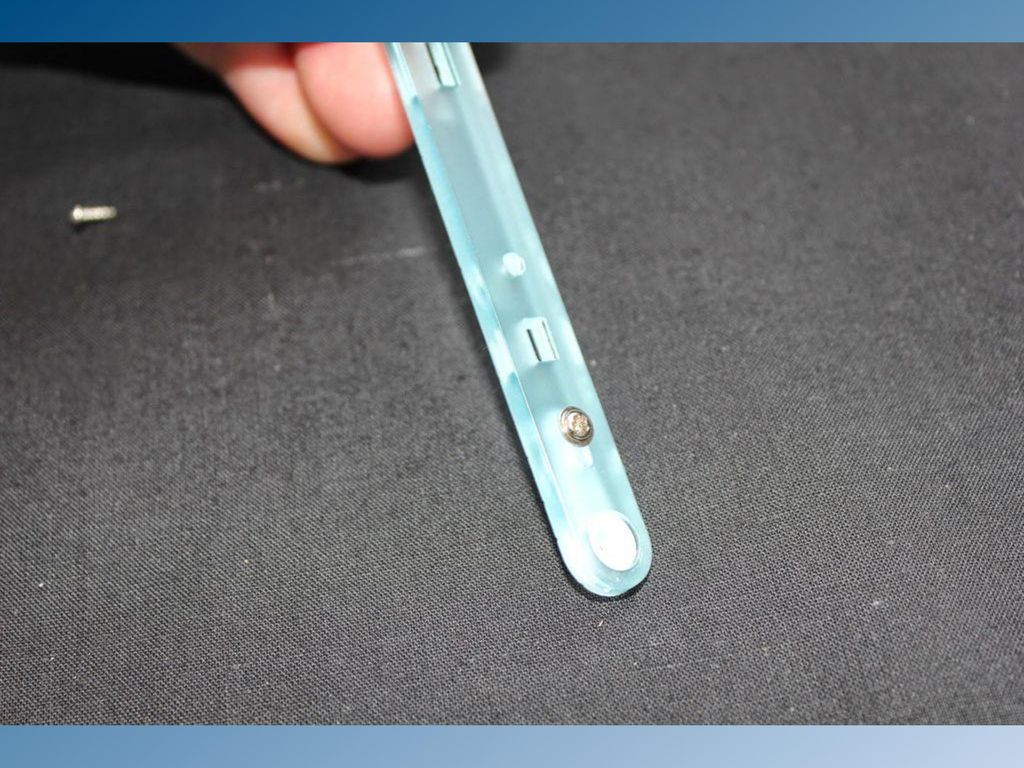
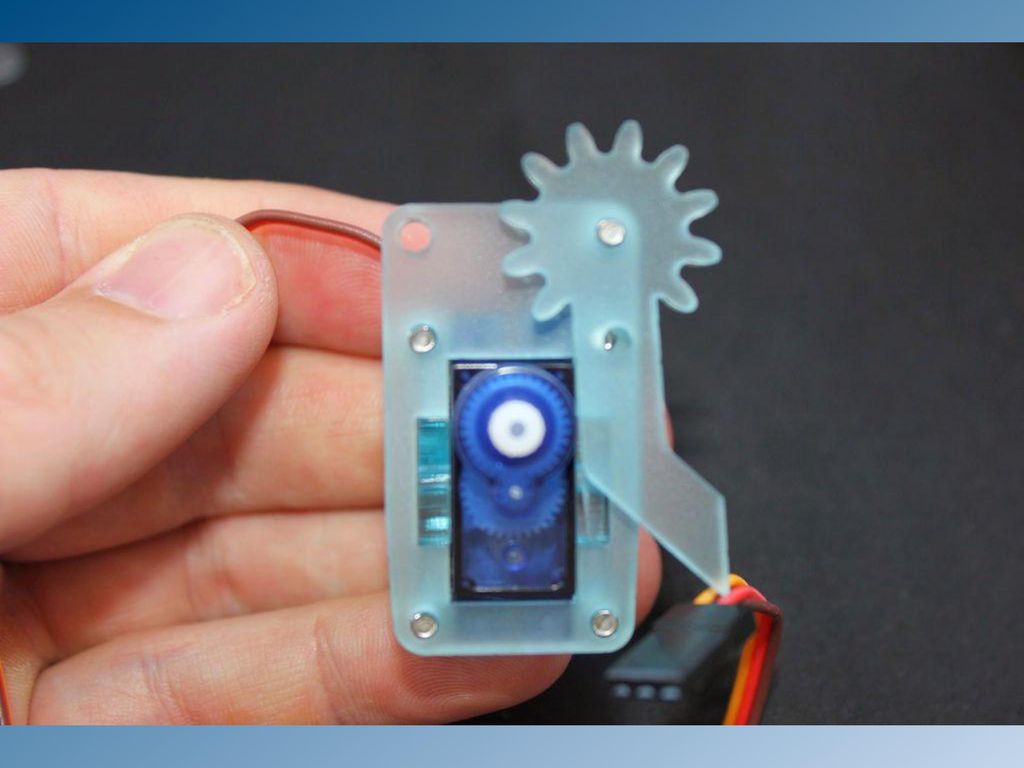
Se coloca base cuadrada

15
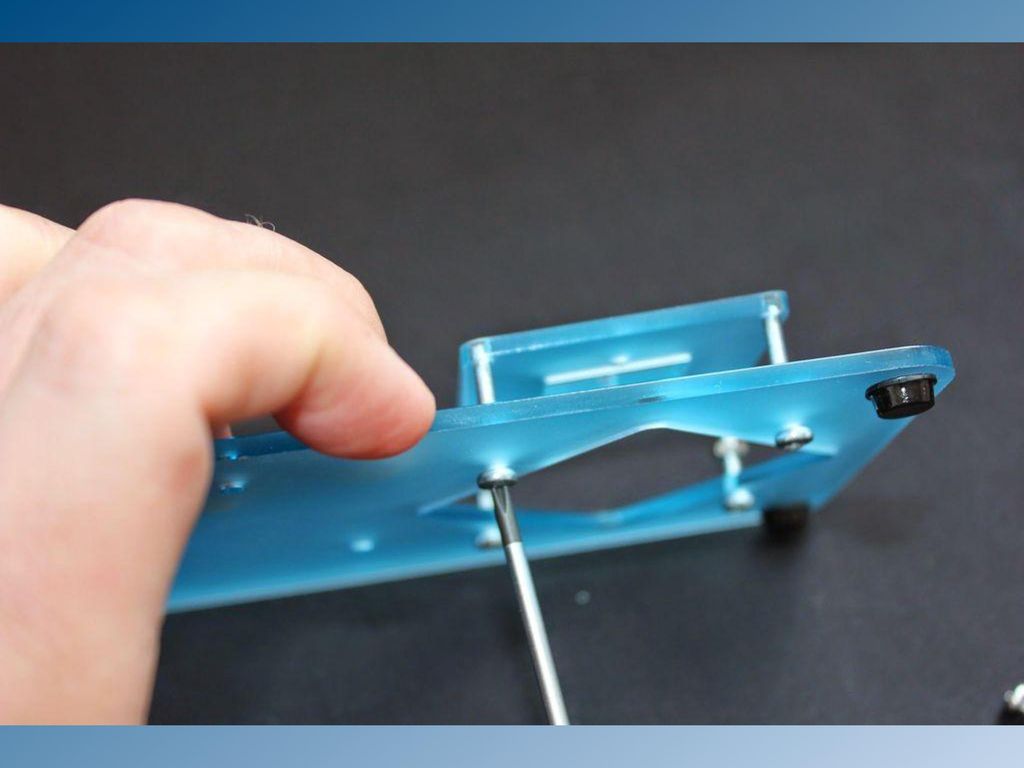
Se atornilla la base como muestra IMAGEN A CONTINUACION

19
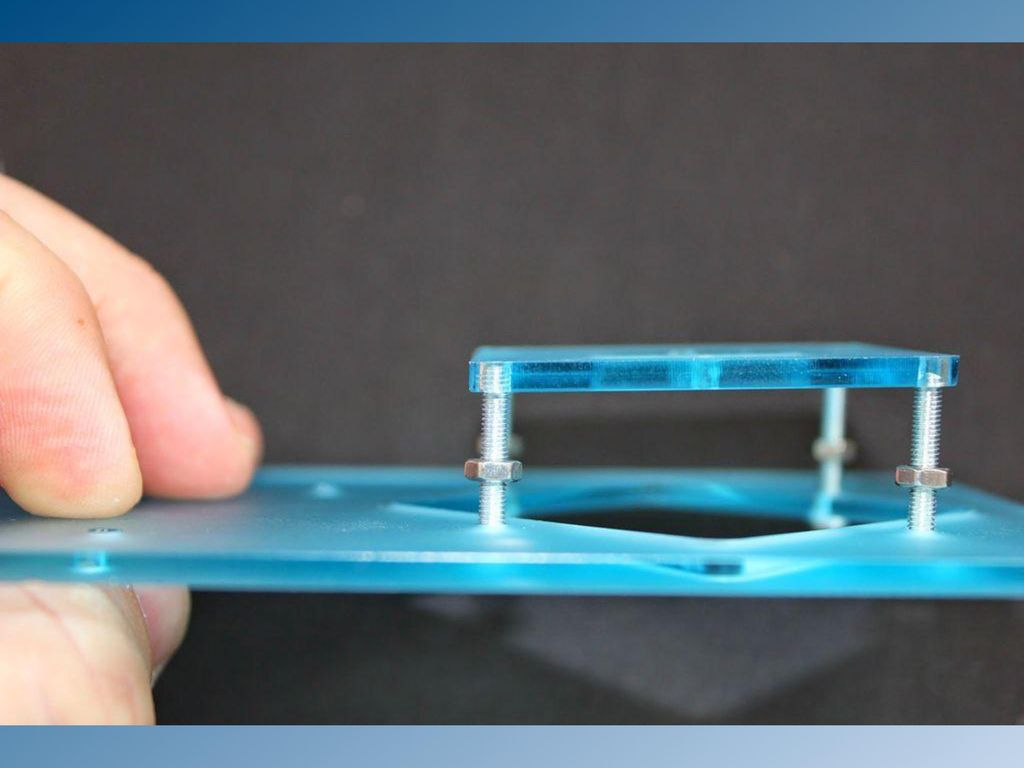
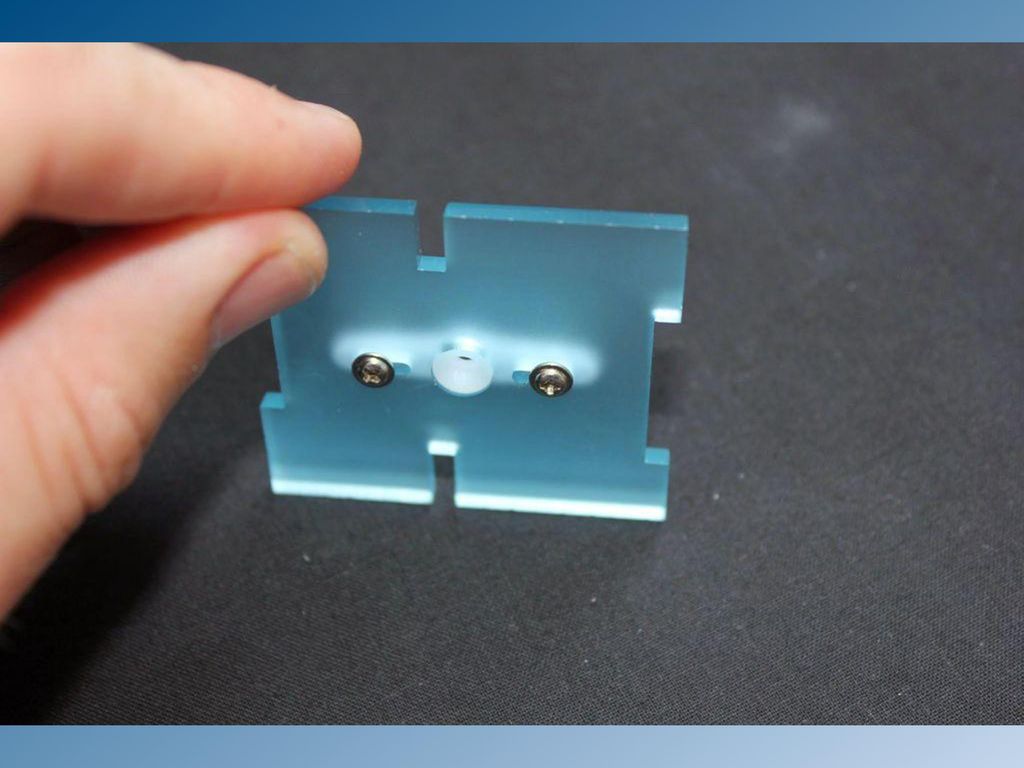
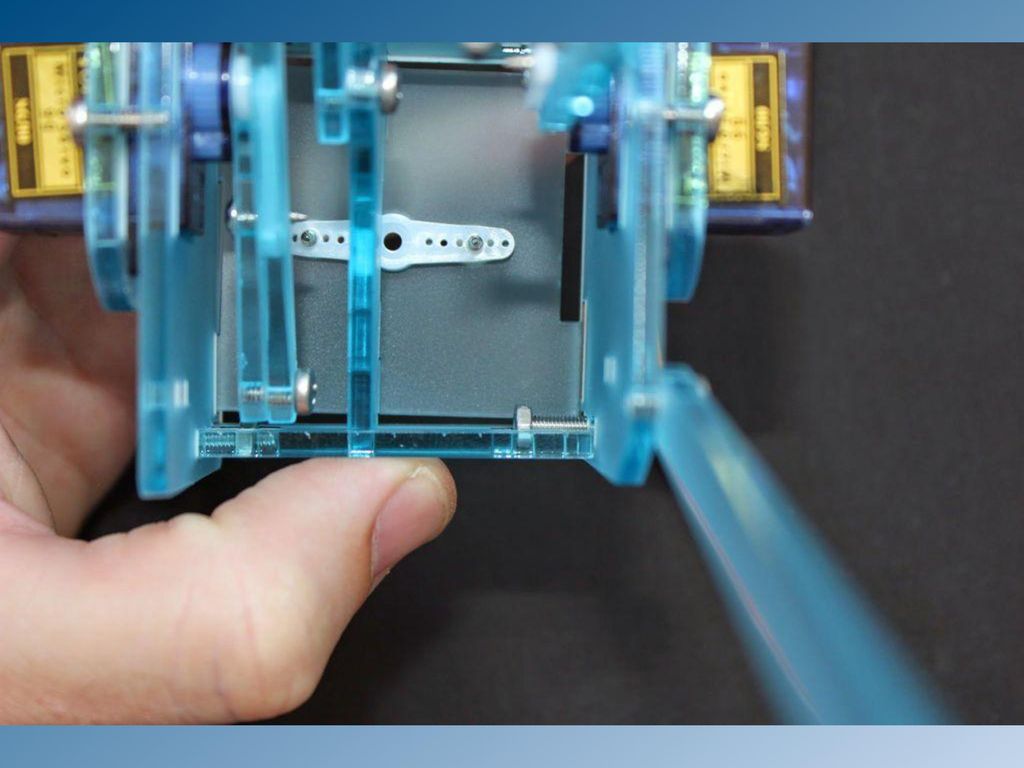
Ahora si se ajustan las tuercas con ayuda de una Pinza

22
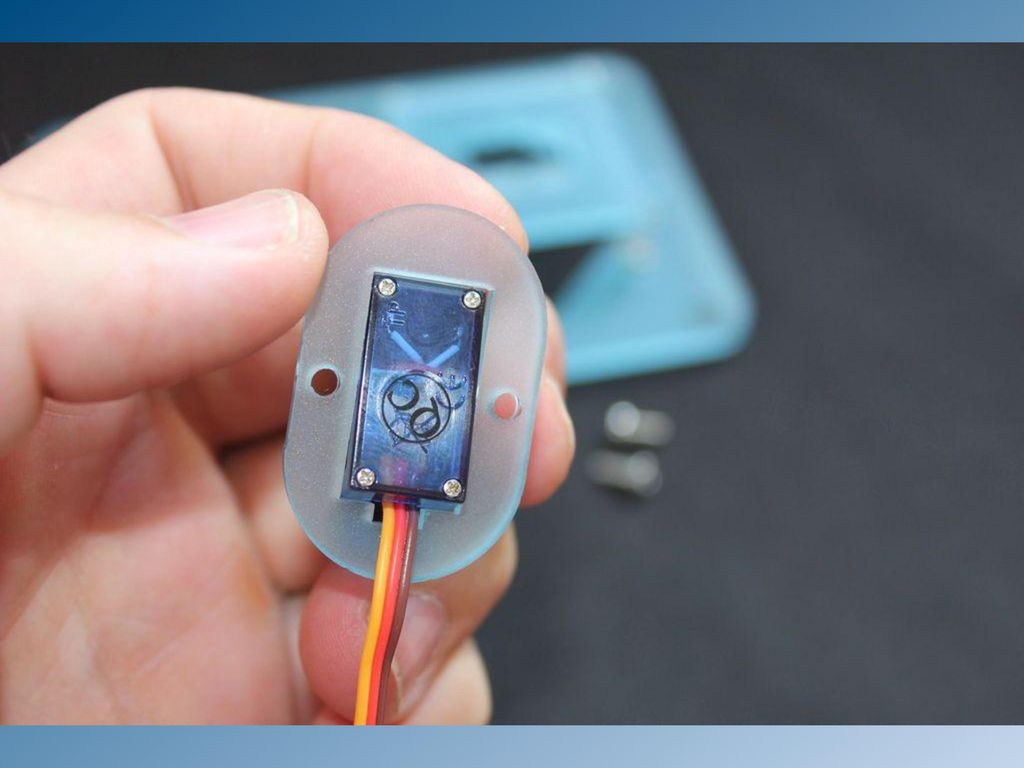
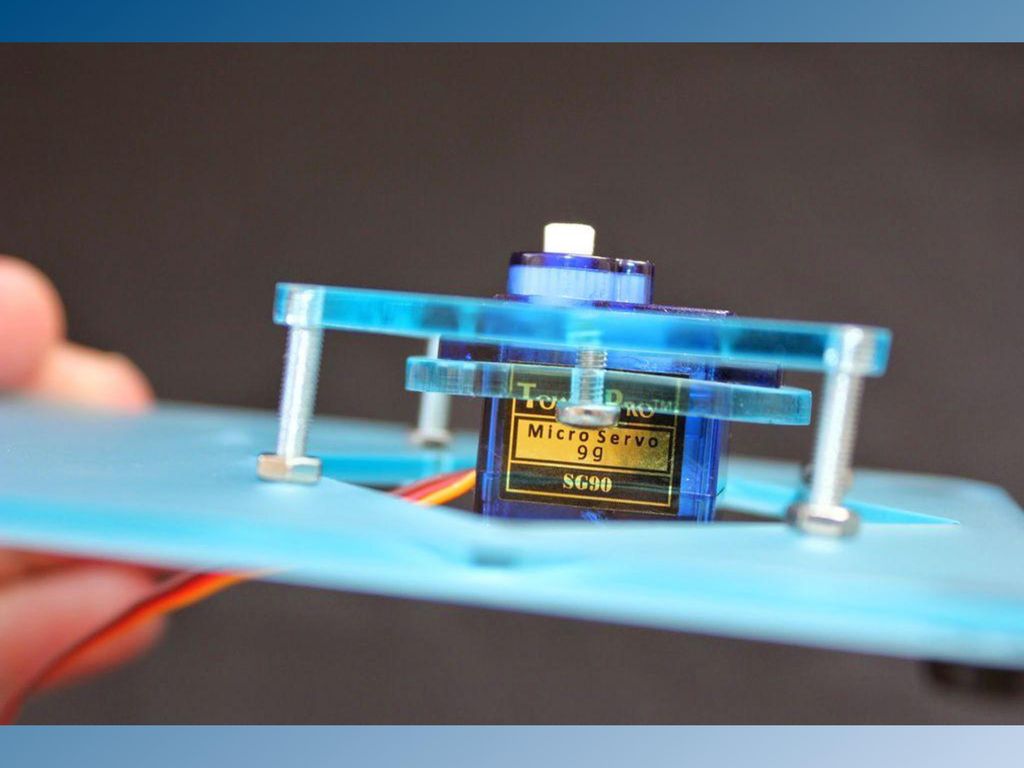
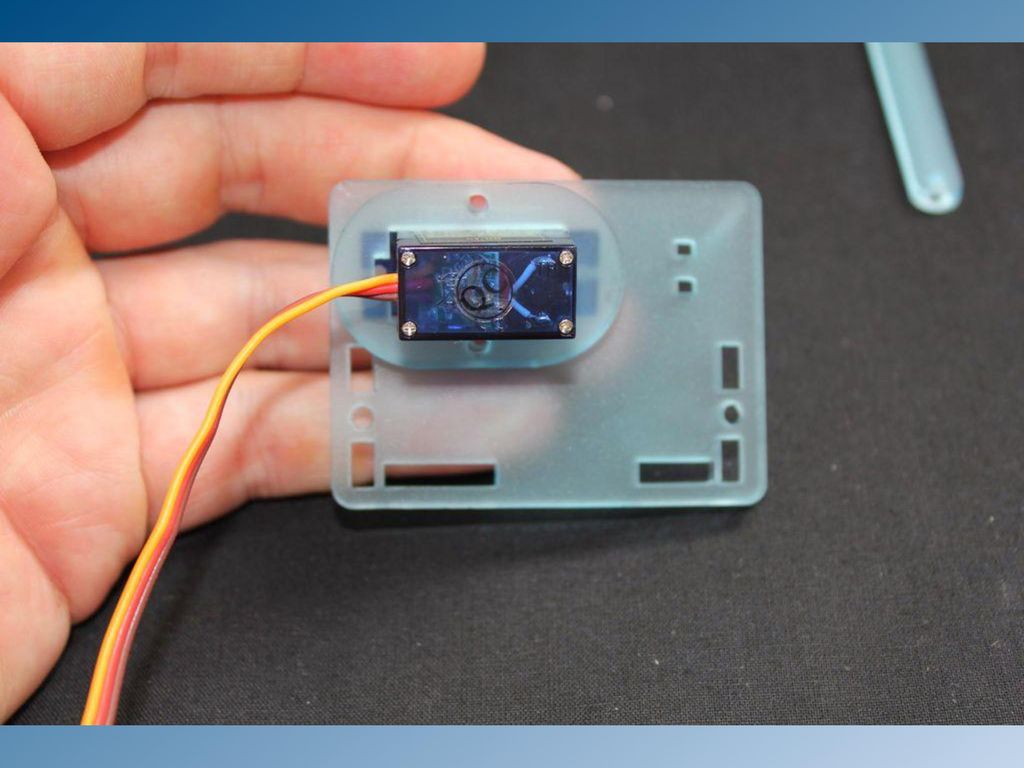
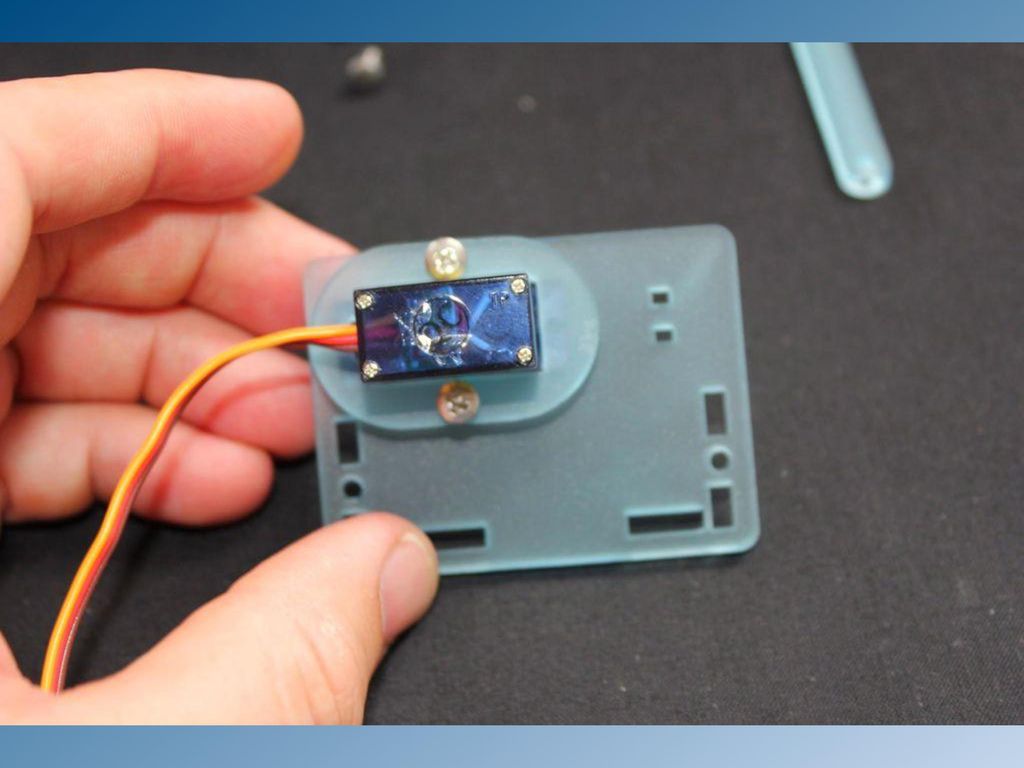
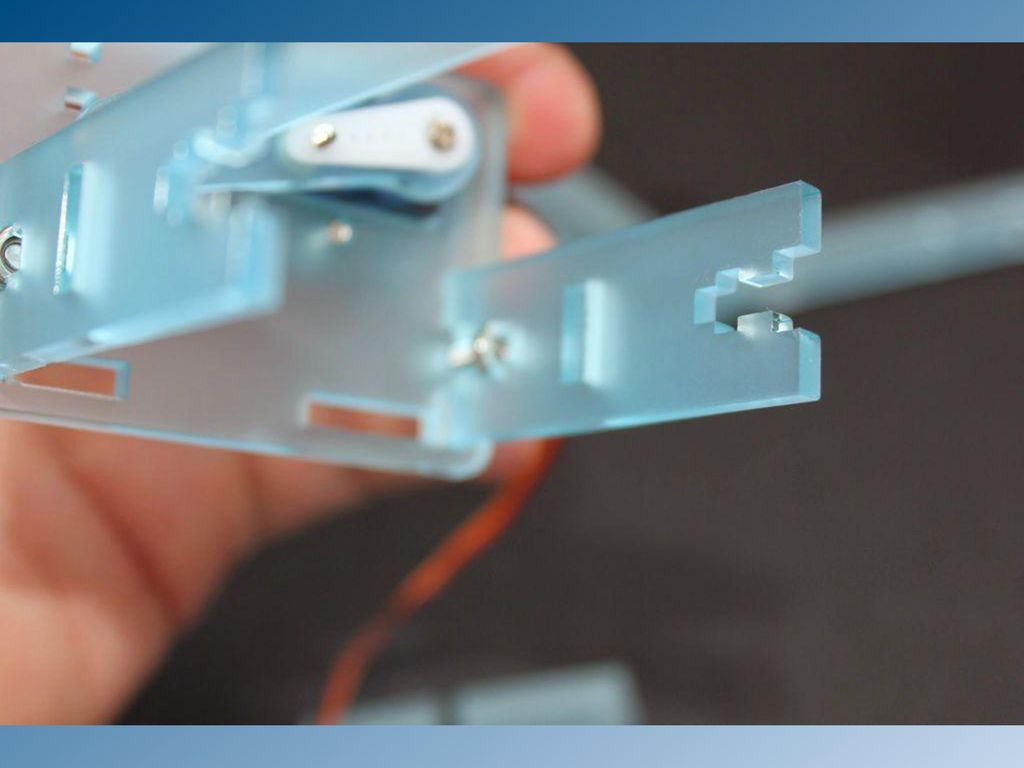
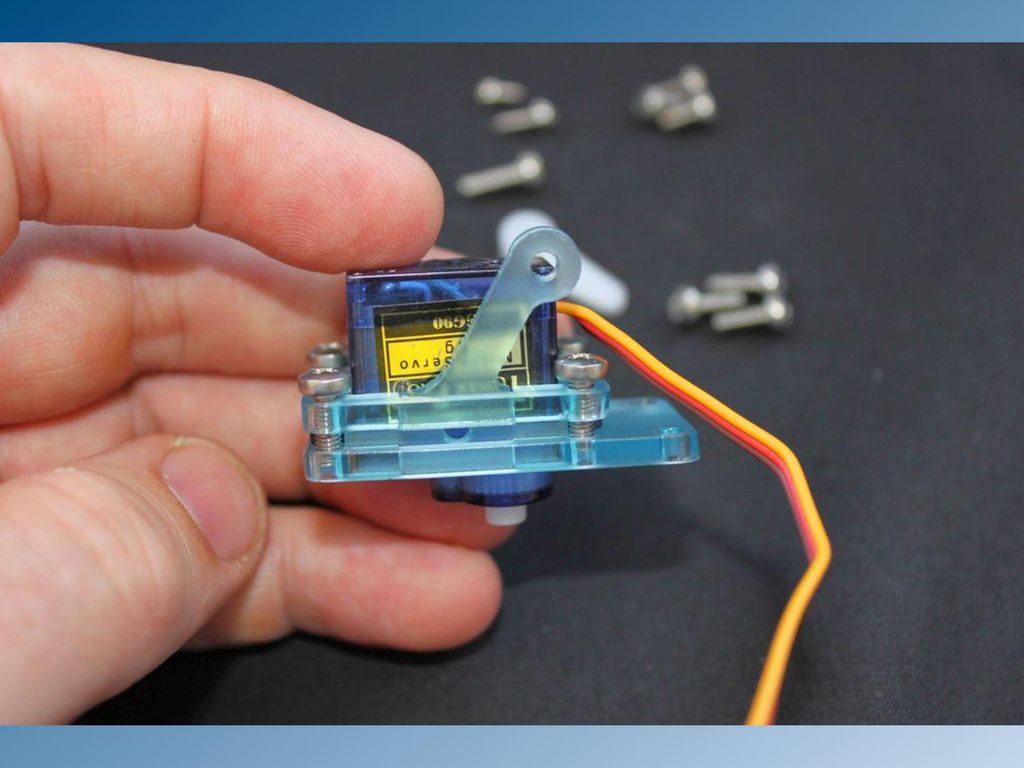
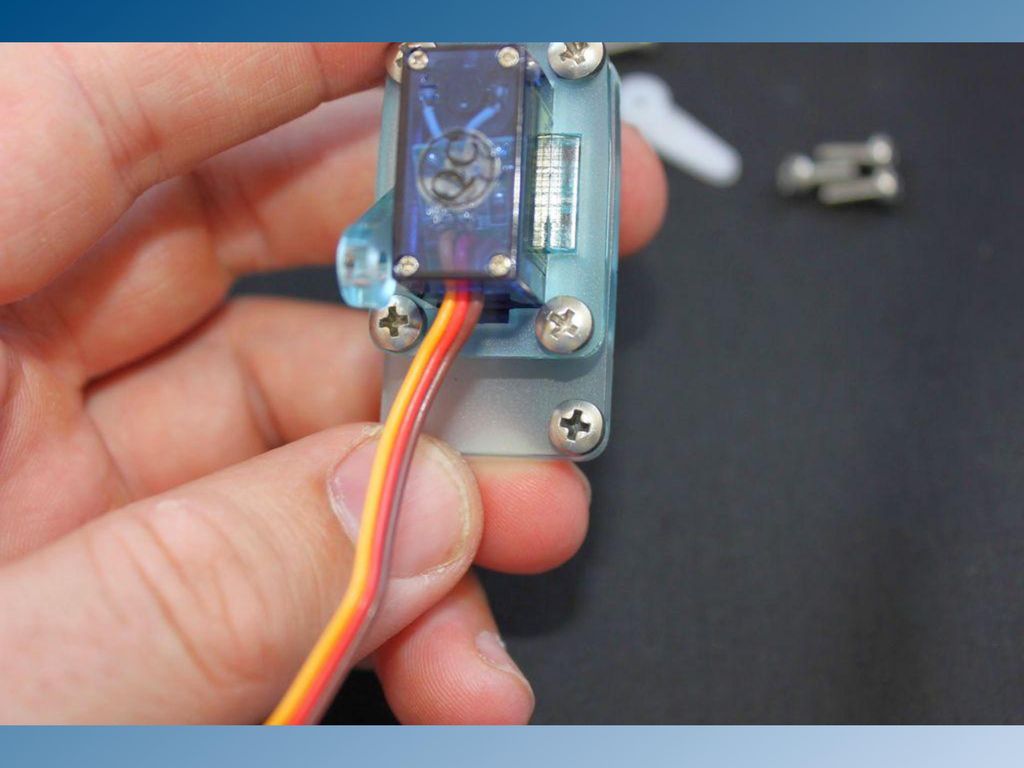
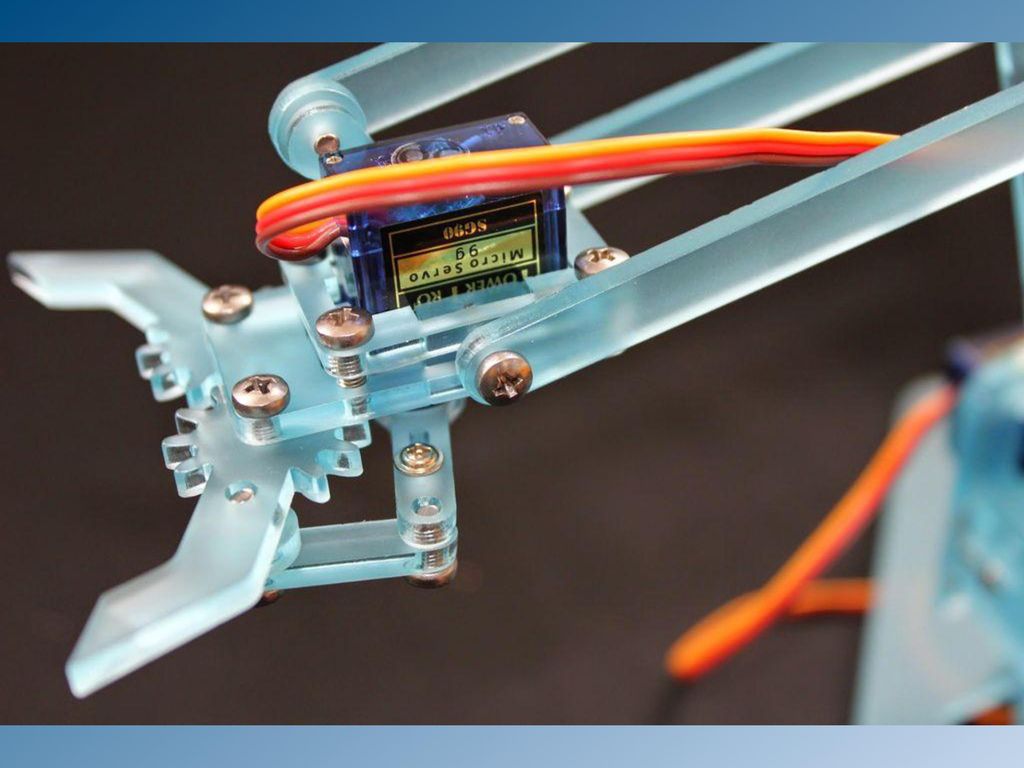
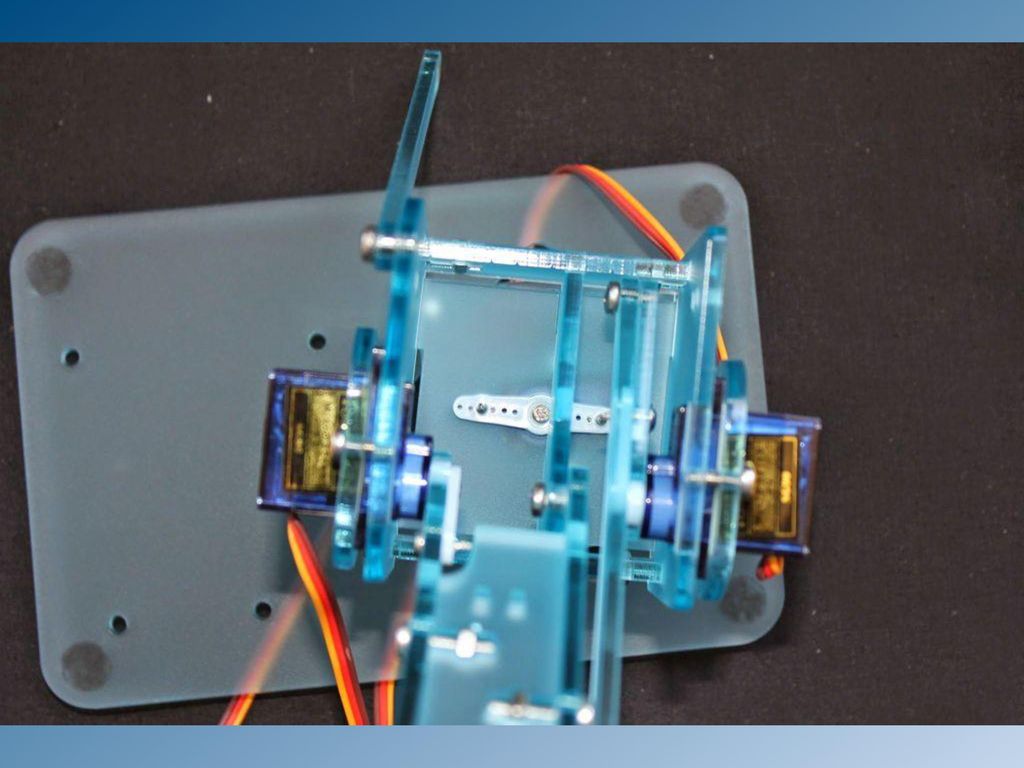
PRESTAR MUCHA ATENCION A COMO PONER ESTE SERVO QUE ASI SE PONEN TODOS.

23
PRESTAR MUCHA ATENCION A COMO PONER ESTE SERVO QUE ASI SE PONEN TODOS.

26
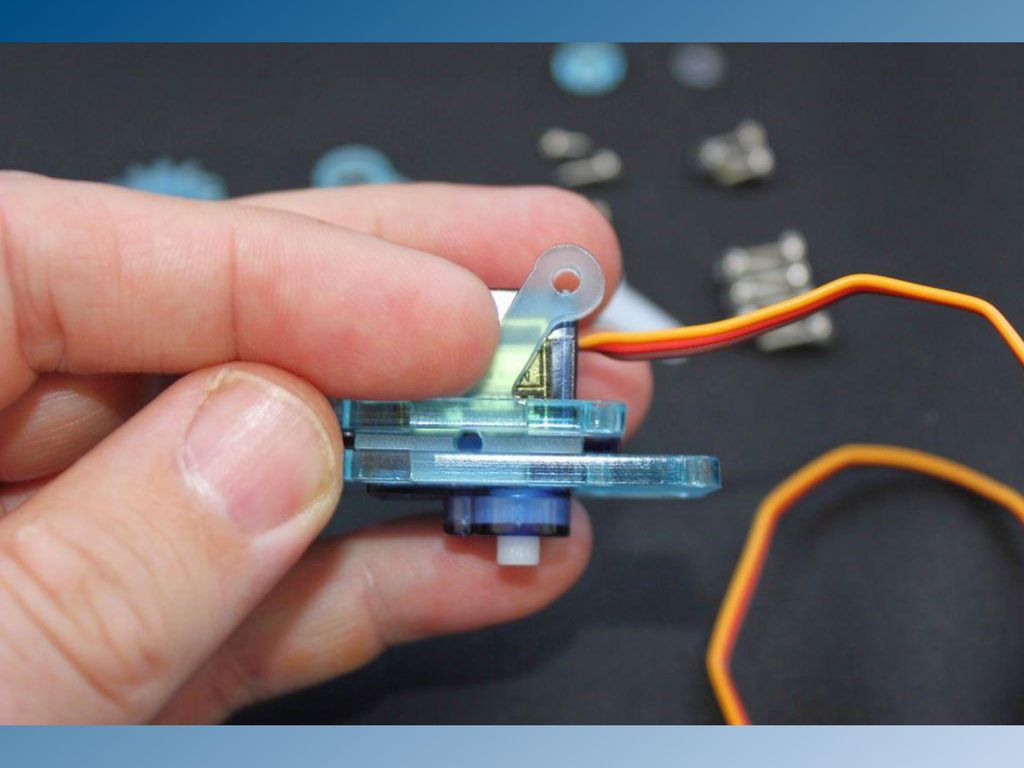
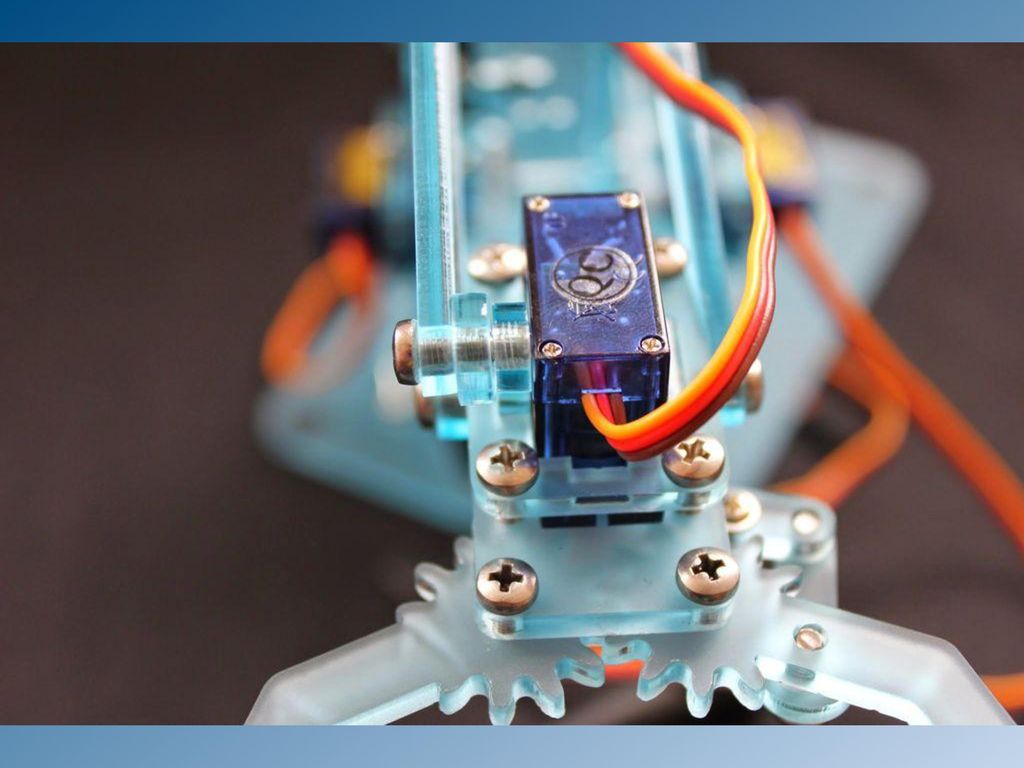
OJO CON LA ORIENTACION DEL SERVO!!!!!

27
La parte del eje hacia el lado interior

28
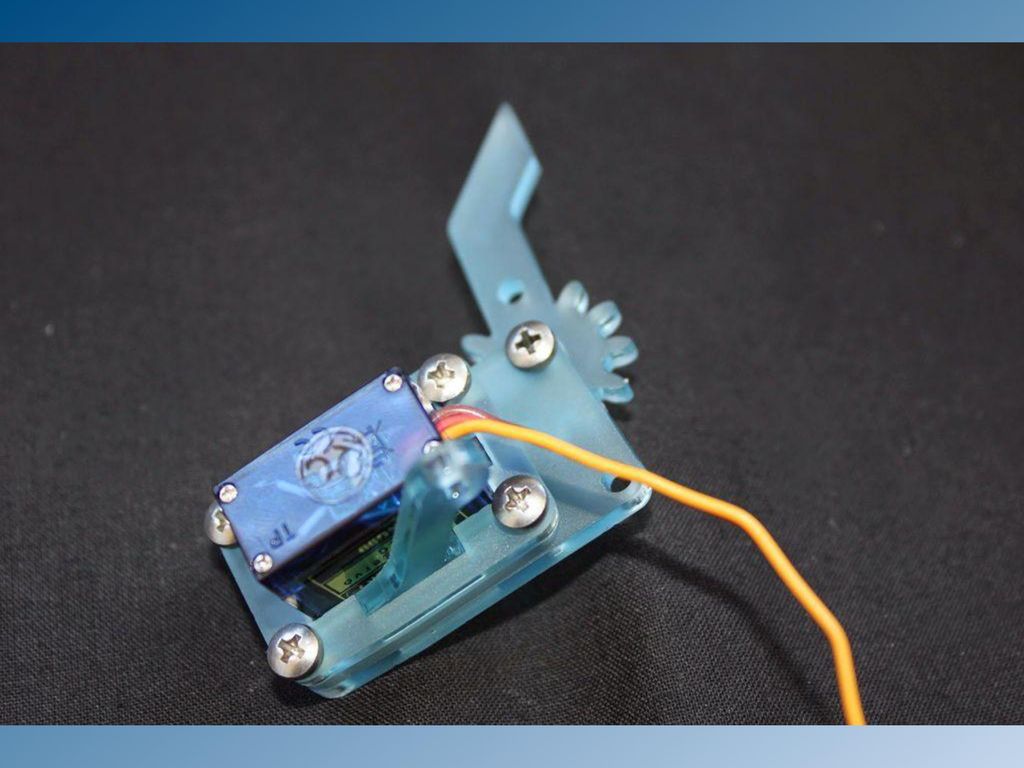
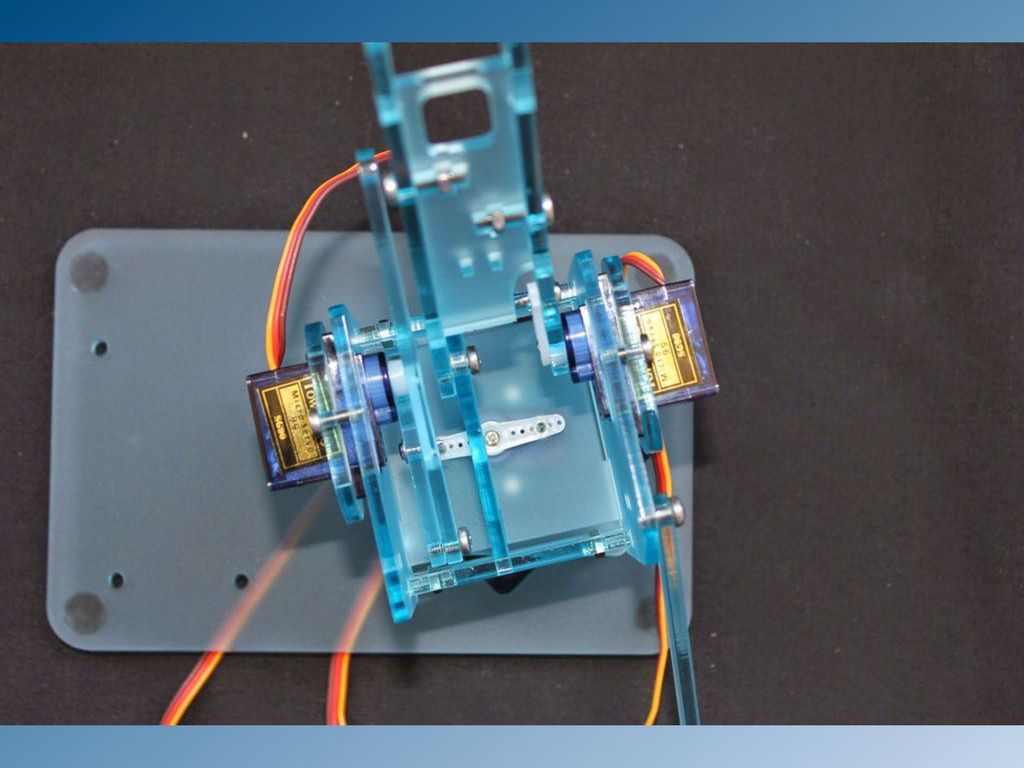
ASI LES TIENE QUE QUEDAR A TODOS

31
VAMOS!! LLEGAMOS A LA SEGUNDA PARTE. EL LADO IZQUIERDO

33
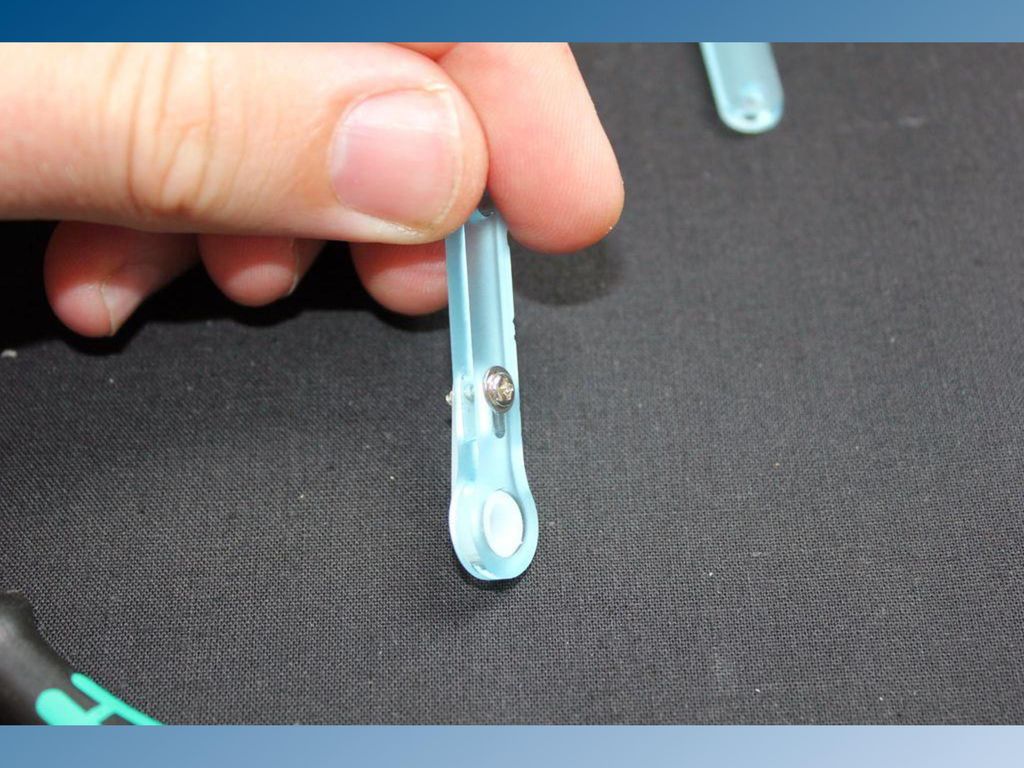
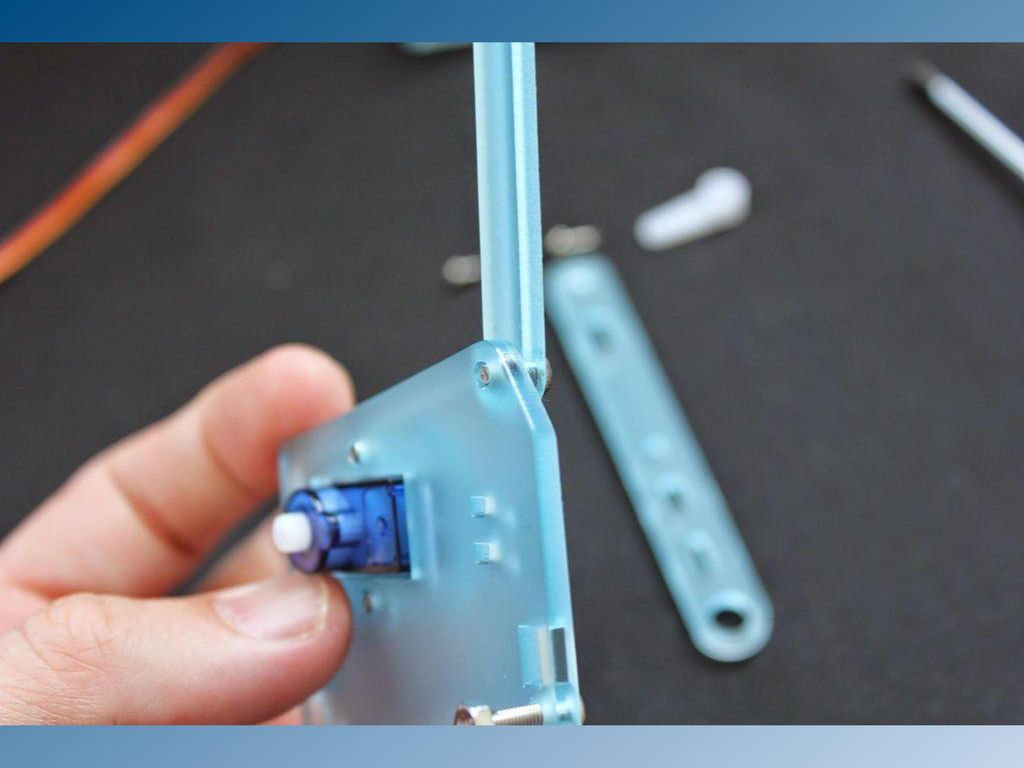
Como en el paso que vimos recien se coloca el soporte al sevo.

41
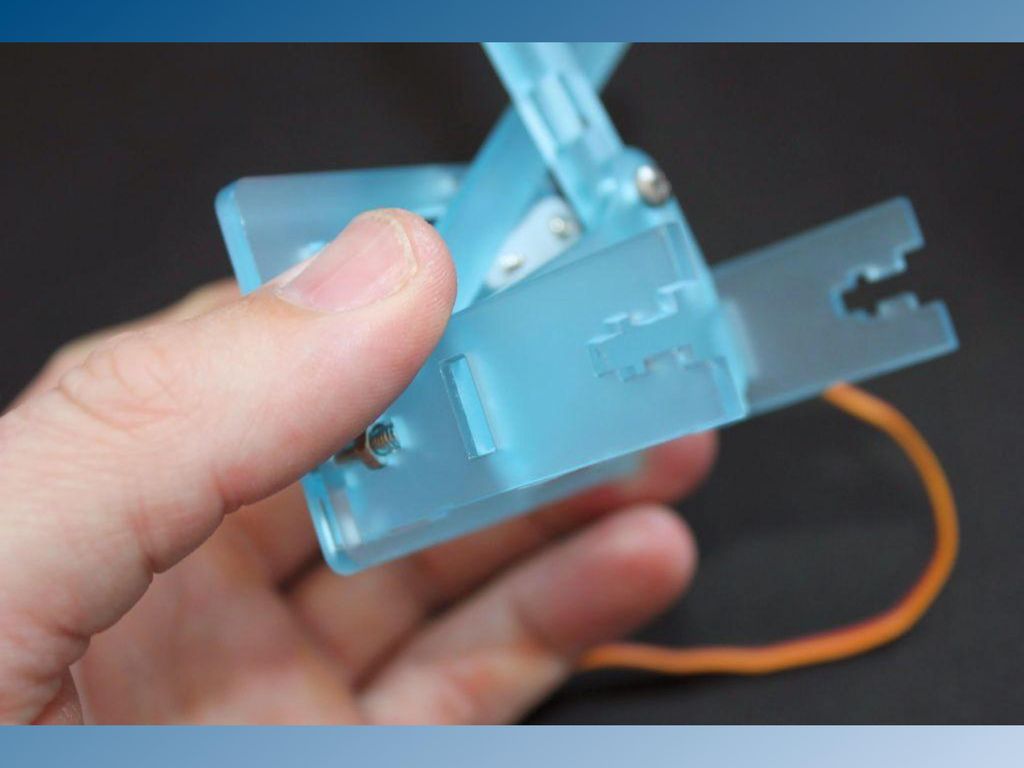
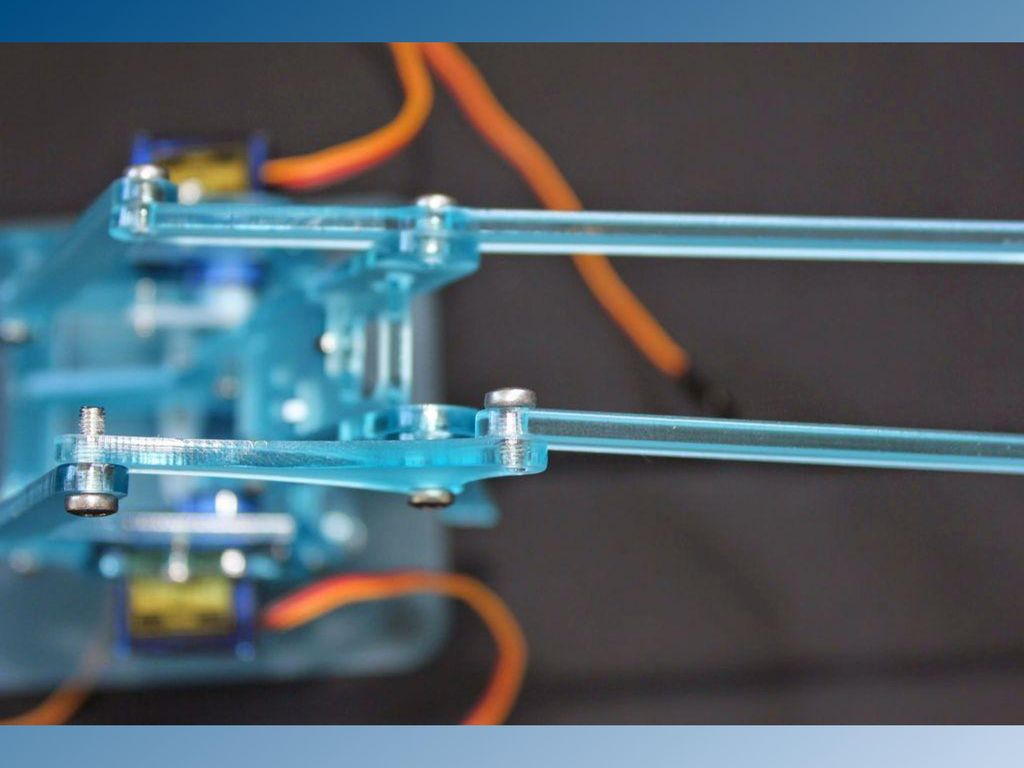
Ojo aca el brazo que tiene el agarre al servo va del lado de abajo con el encastre para el servo del lado de arriba.

42
Poscion maxima del servo.

44
Posicion minima del sevo

45
VAMOS CON LA PARTE DERECHA

46
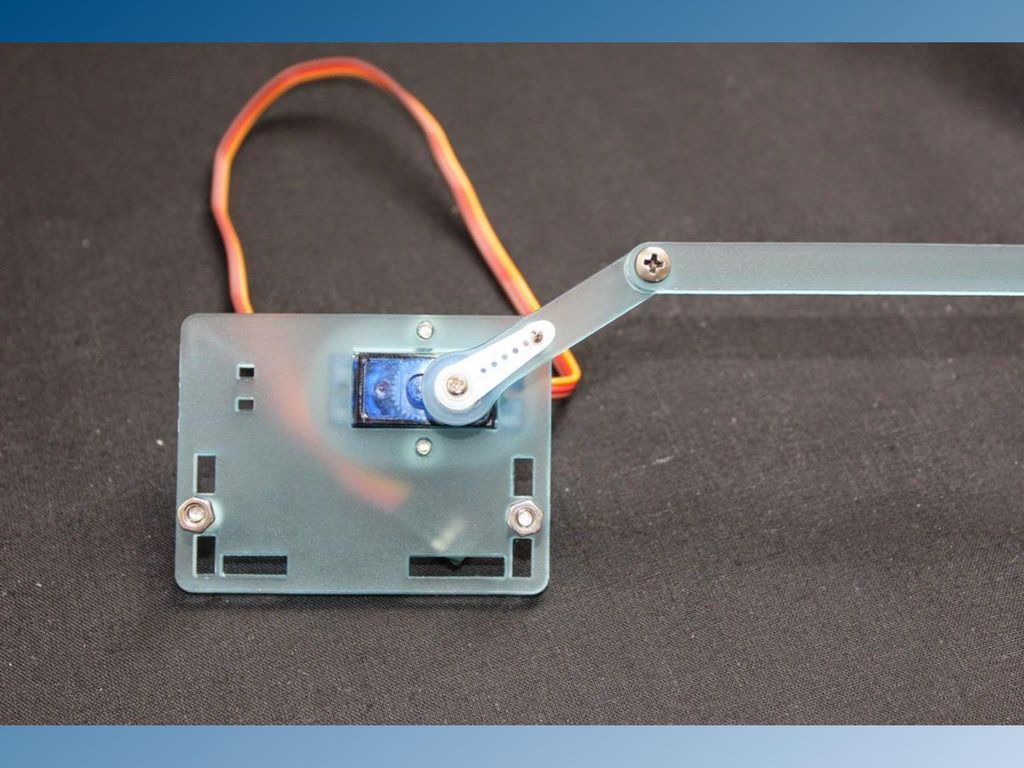
Colocar el ervo en el soporte
Colocar el ervo en el soporte. OJO CON COMO VA EL SERVO RESPECTO DE LA BASE QUE SE VE EN LA IMAGEN

47
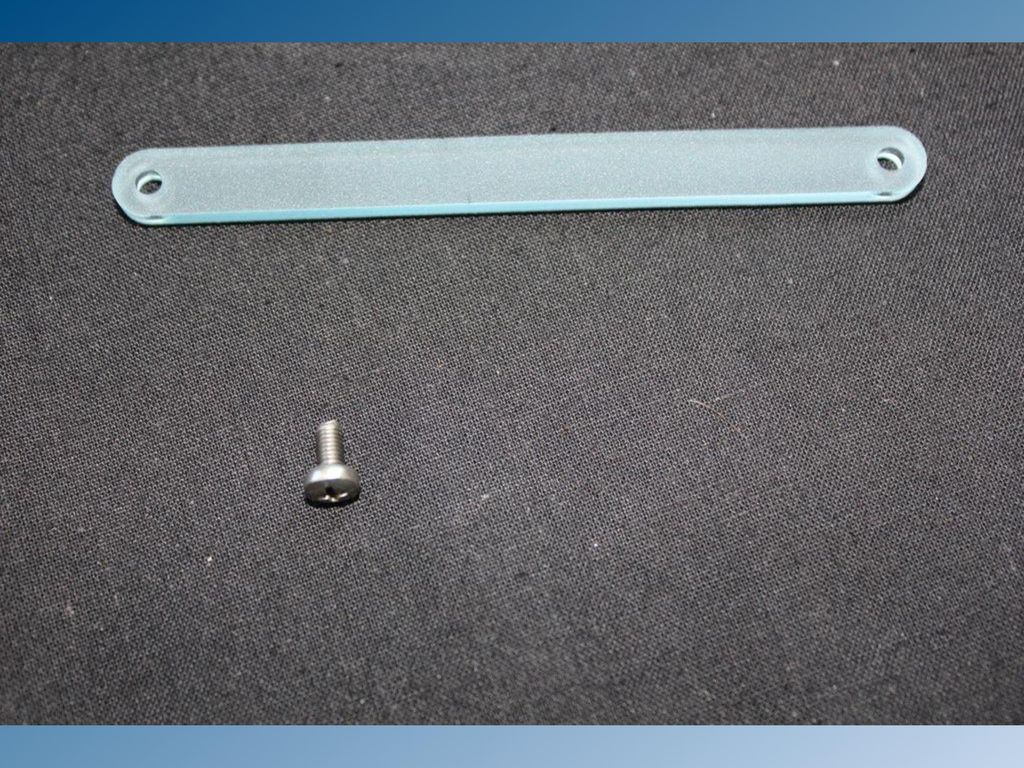
Agregamos palito

52
POSICION MINIMA PARA EL SERVO.

53
POSICION MAXIMA PARA EL SERVO

54
LA BASE

55
PIEZA EN L POR DELANTE DE LA PIEZA LARGA

56
Encastre de servo para la base

58
Ahora se pone mas entretenido
Ahora se pone mas entretenido!!! Empezamos a ensamblar de a poco las partes. PARTE CUADRADA

59
Con pegamento!!!! Sin tuerca ni tornillo!!!!

61
Se coloca pienza en L vista en diapositiva 48 SE COLOCA CON LA PARTE PAS ALTA DEL LADO DEL SERVO COMO UNA L AL REVES

63
SE COLOCA LA BASE

64
SIN TUERCA CON PEGAMENTE

65
idem

66
SE COLOCA LA OTRA PARTE QUE NO ES CUADRADA

69
ARRANCAMOS CON LA PARTE DEL BRAZO

70
VA DEL LADO CUADRADO POR ADELANTE A LA IZQUIERDA POR ATRÁS A LA DERECHA

71
AHORA LA PARTE DEL BRAZO DEL LADO NO RECTANGULAR

72
Se coloca TRIANGULO parte inferior por delante como en la imagen y parte superior izquierda por detrás ADEMAS SE COLOCA BRAZITO CON LADO MAS CIRCULAR ENTRE EL TRIANGULO Y EL BRAZO DE LA BASE

81
Se coloca parte un V primero desde arriba y luego de abajo
Se coloca parte un V primero desde arriba y luego de abajo. OJO CON EL SENTIDO DEL SERVO

93
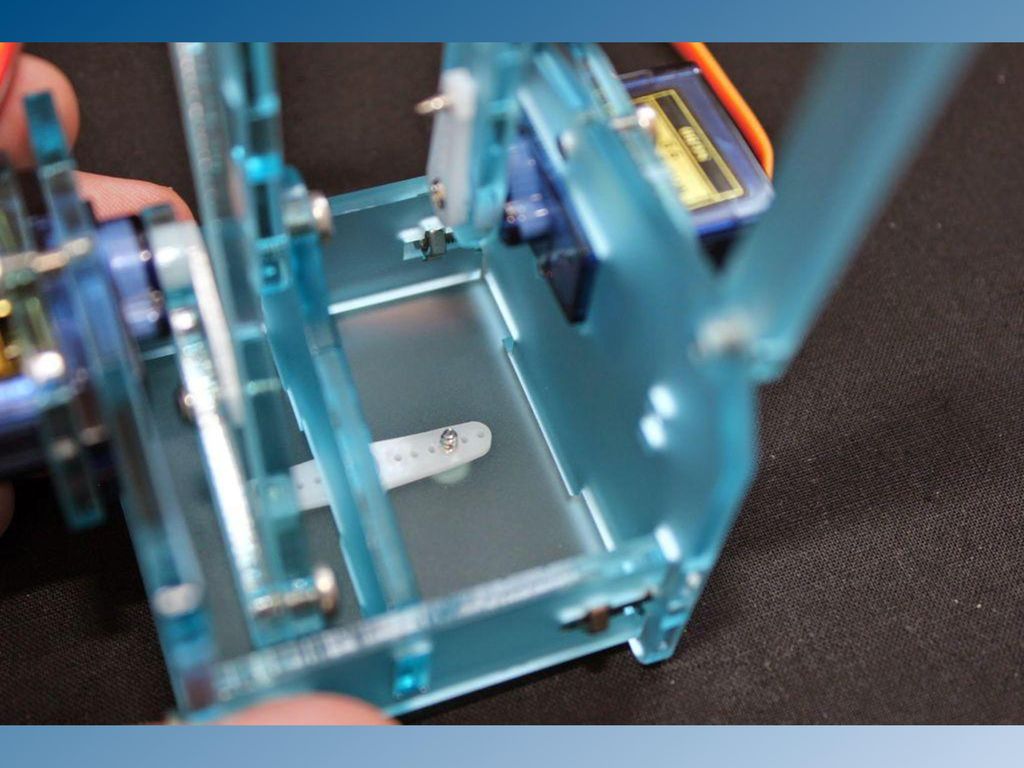
Se agrega mini brazo LA PARTE QUE AGARRA EL SERVO VA POR ABAJO

94
Aca hay que calibrar el servo

95
Entre el brazo superior y el agarre del servo va una arandela

101
Ejemplos de Brazos Roboticos
Pinokio Lamp. Robot que recuerda ordenes Robot escribe la hora Manos Roboticas

Presentaciones similares



















 Estructura de un automatismo.>")




