Descargar la presentación
La descarga está en progreso. Por favor, espere

1
Modelado de Sistemas Eloy Edmundo Rodríguez Vázquez Maestría en Control Automático y Sistemas Dinámicos PICYT Clase 2 b)
")
2
Contacto Eloy Edmundo Rodríguez Vázquez Estudiante de Doctorado Cel.: 442 146 1495 Email.edmundo.picyt@gmail.comedmundo.picyt@gmail.com Sitio Web de Apoyo http://sites.google.com/site/eervpicytmodmat/home

3
Unidad 2 Respuesta Frecuencial OBJETIVO: Al finalizar la unidad, el alumno será capaz de realizar el análisis en frecuencia de la respuesta de un sistema dinámico y de diseñar sistemas de compensación.

4
2.1 Diagramas de Bode 2.2 Diagramas de Nyquist 2.3 Diagramas de Nichols & Black 2.4 Ejemplos de Respuesta en Frecuencia Unidad 2 Respuesta Frecuencial

5
2.1 Diagramas de Bode Transformada de Fourier: Transformada cosenoTransformada seno

6
2.1 Diagramas de Bode Diagrama de BodeDiagrama de Polar

7
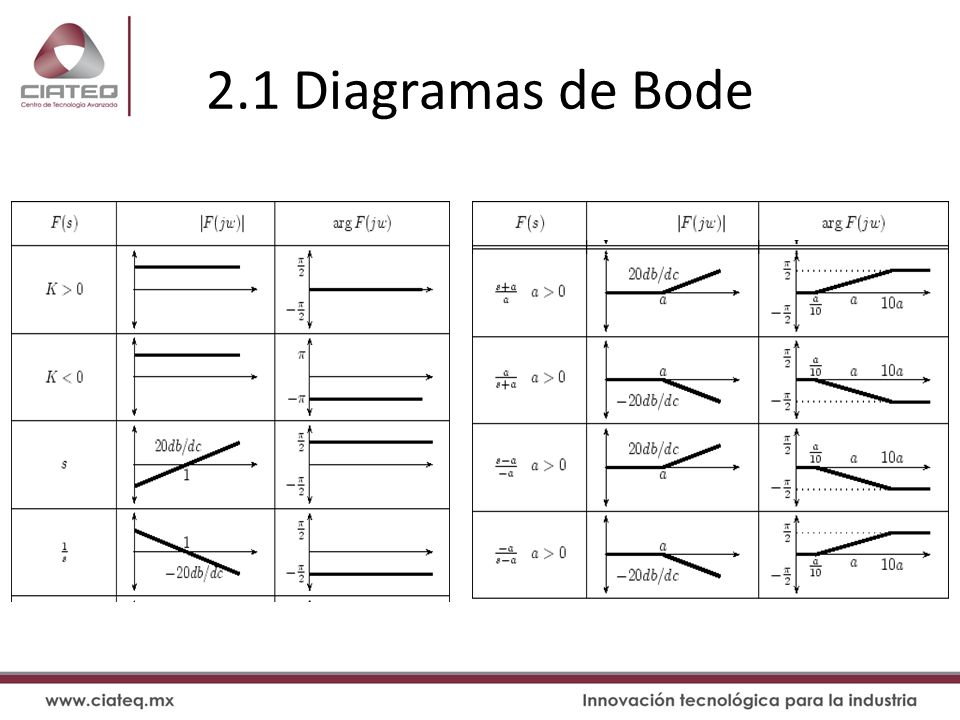
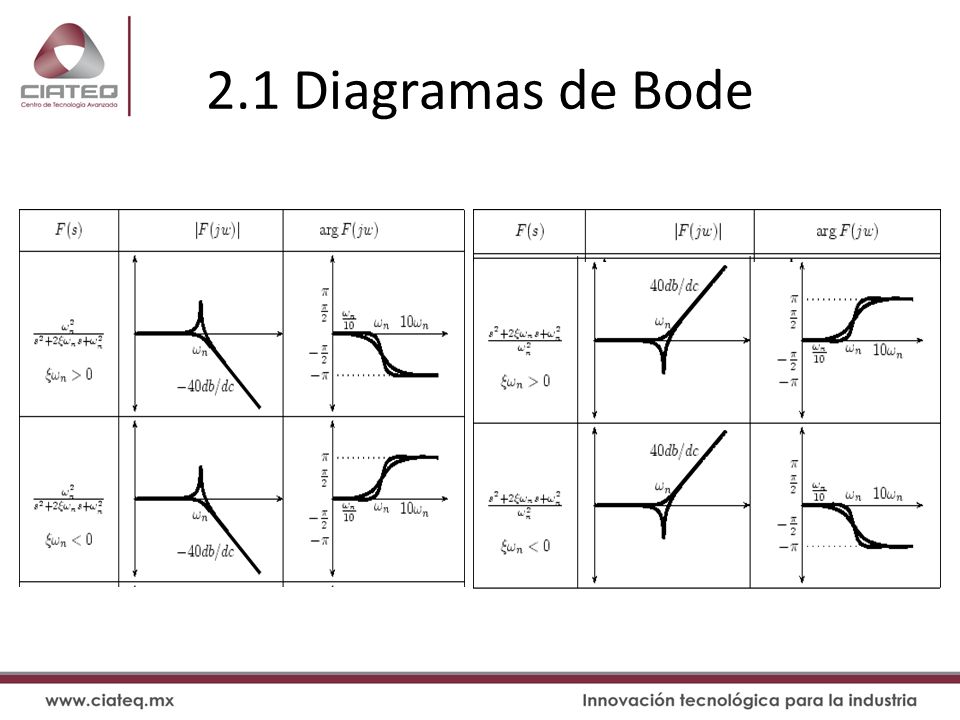
2.1 Diagramas de Bode

10
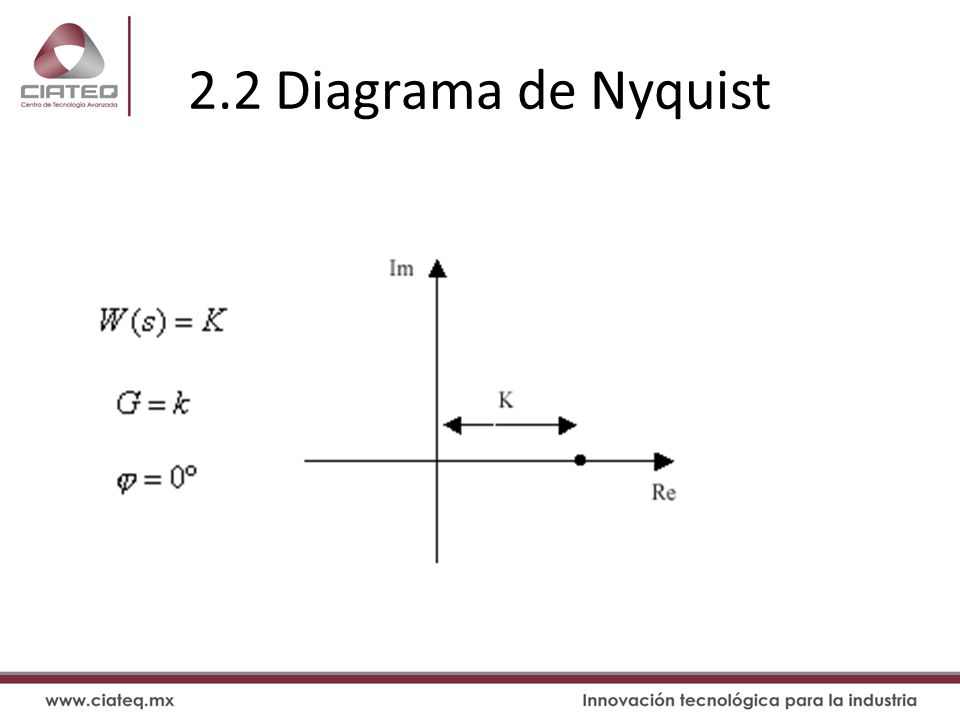
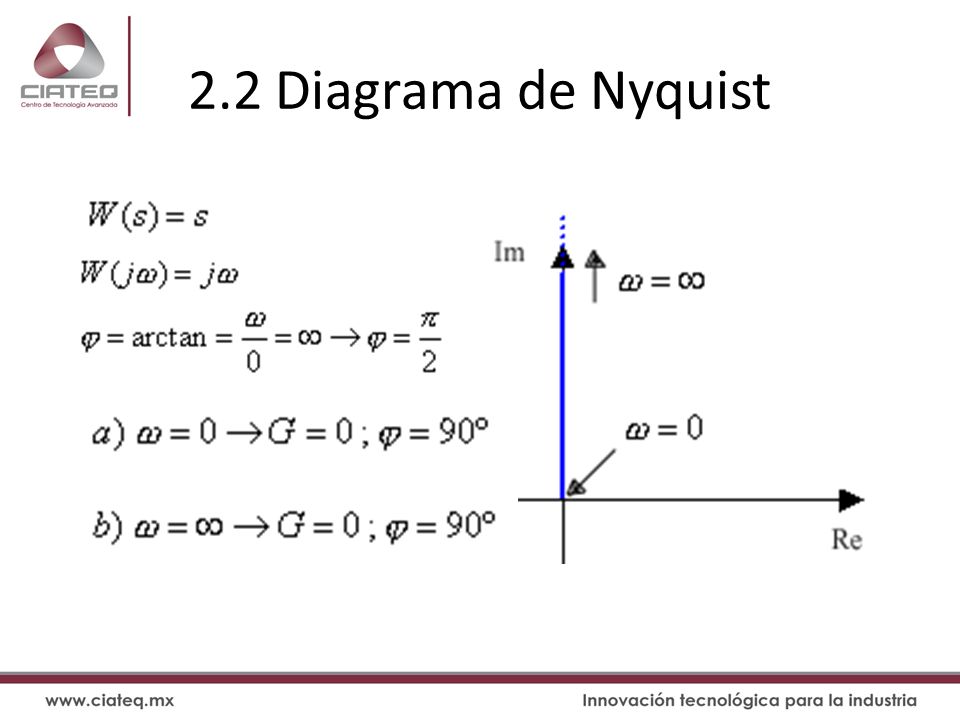
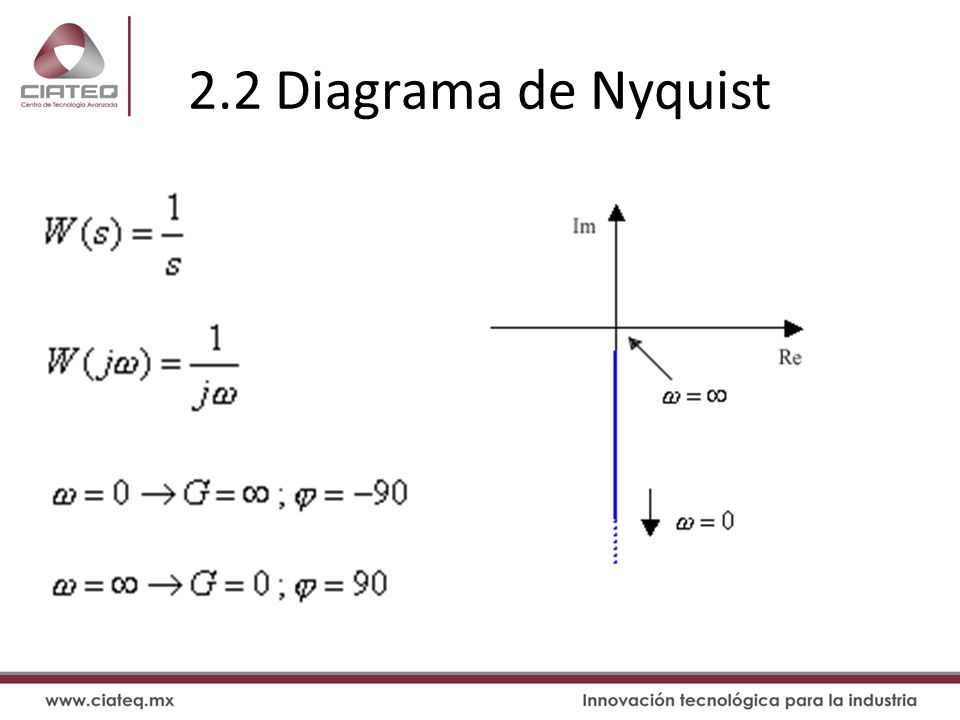
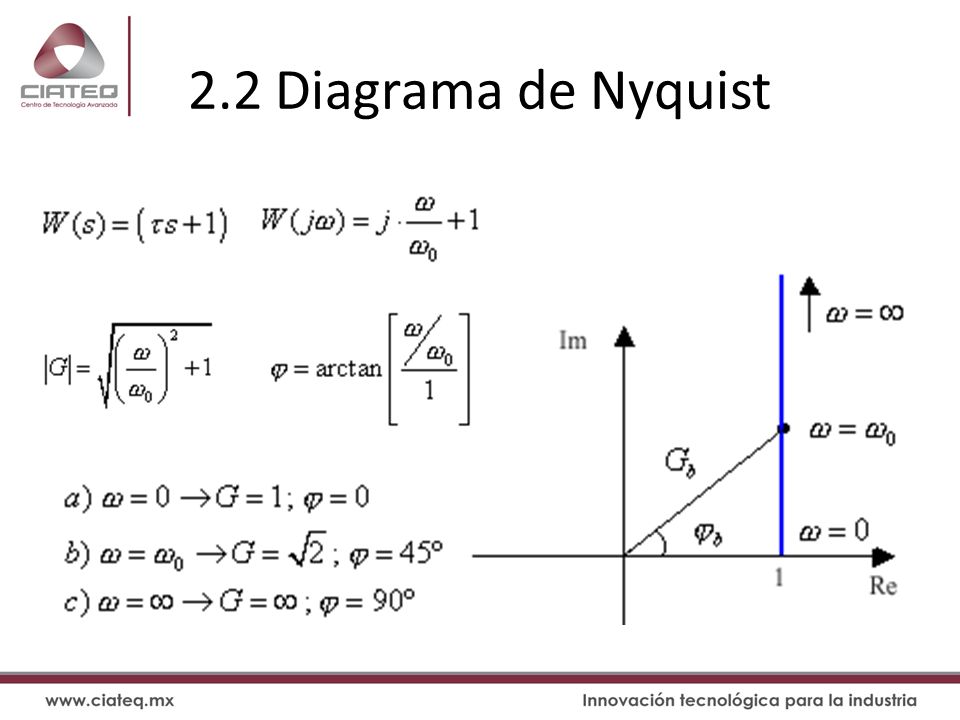
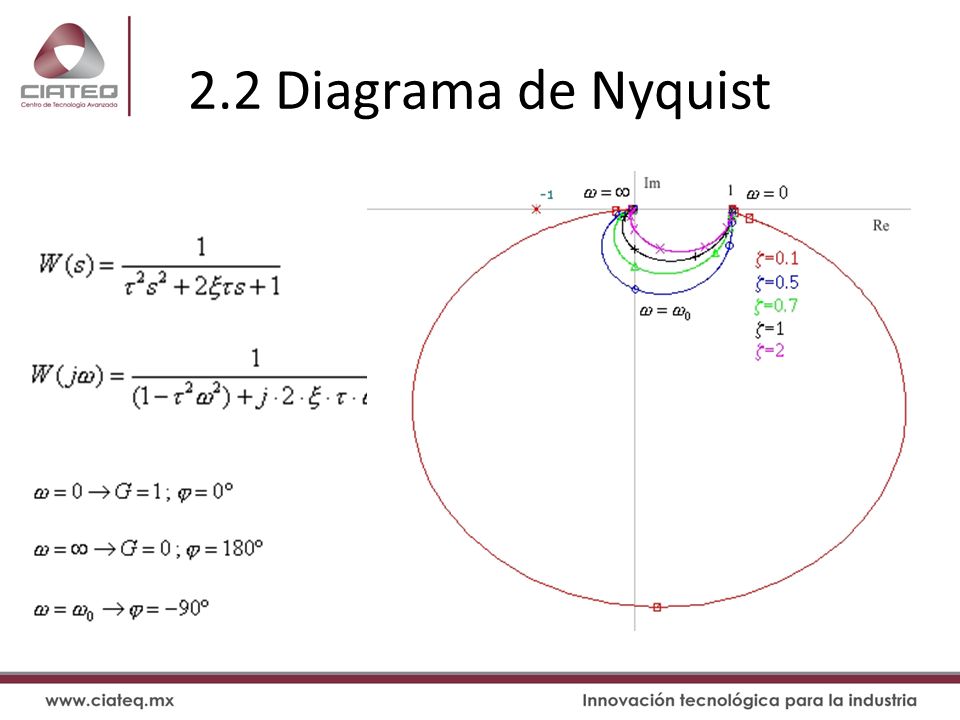
2.2 Diagrama de Nyquist

17
2.3 Diagrama de Nichols & Black

18
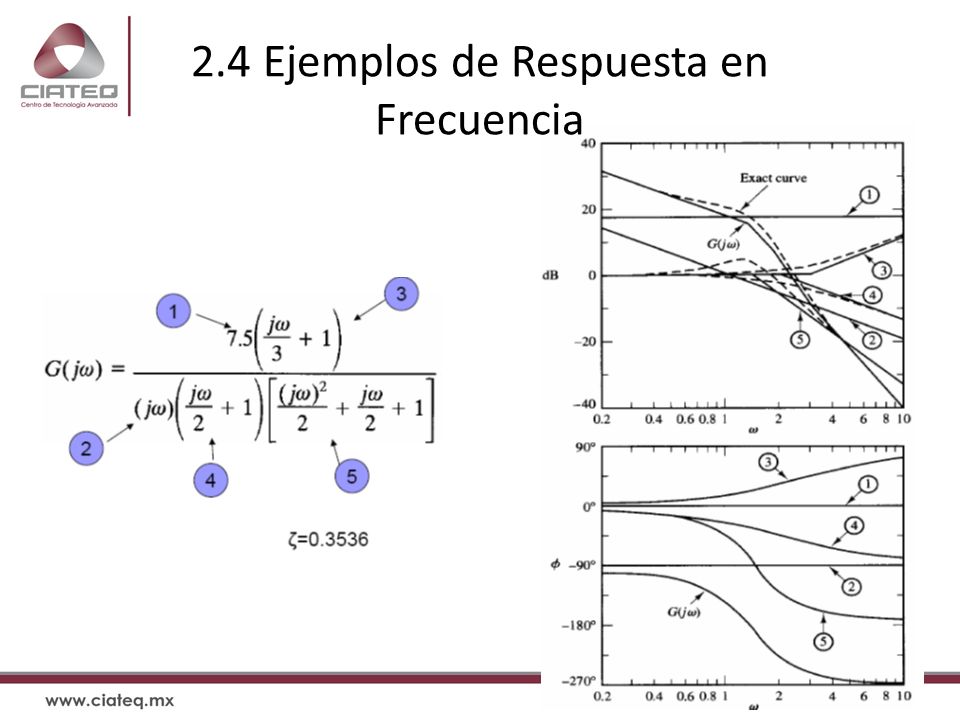
2.4 Ejemplos de Respuesta en Frecuencia Diagrama de Bode Diagrama de Nyquist Diagrama de Nichols

19
2.4 Ejemplos de Respuesta en Frecuencia %Definiendo la función de transferencia del circuito electrico TFun=tf([0 1.5 0],[1 1.5 0.3]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);
![2.4 Ejemplos de Respuesta en Frecuencia %Definiendo la función de transferencia del circuito electrico TFun=tf([ ],[ ]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);](http://images.slideplayer.es/38/10797841/slides/slide_19.jpg "2.4 Ejemplos de Respuesta en Frecuencia %Definiendo la función de transferencia del circuito electrico TFun=tf([ ],[ ]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);")
20
2.4 Ejemplos de Respuesta en Frecuencia

21
m1 k1c1 x1 F(t) Diagrama de Bode Diagrama de Nyquist Diagrama de Nichols
 Diagrama de Bode Diagrama de Nyquist Diagrama de Nichols")
22
2.4 Ejemplos de Respuesta en Frecuencia m1 k1c1 x1 F(t) %Definiendo la función de transferencia del circuito mecanico TFun=tf([0 0 4],[1 4 8]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);
![2.4 Ejemplos de Respuesta en Frecuencia m1 k1c1 x1 F(t) %Definiendo la función de transferencia del circuito mecanico TFun=tf([0 0 4],[1 4 8]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);](http://images.slideplayer.es/38/10797841/slides/slide_22.jpg "2.4 Ejemplos de Respuesta en Frecuencia m1 k1c1 x1 F(t) %Definiendo la función de transferencia del circuito mecanico TFun=tf([0 0 4],[1 4 8]); %Graficando la Respuesta en Frecuencia, Bode, Nyquist & Nichols subplot(1,3,1) bode(TFun); subplot(1,3,2) nyquist(TFun); subplot(1,3,3) nichols(TFun);")
23
2.4 Ejemplos de Respuesta en Frecuencia

Presentaciones similares

















, y = a c o s ( b x + c ) x y Clase 81.>")



>")